ch12 - Rice University
advertisement

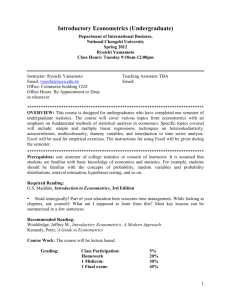
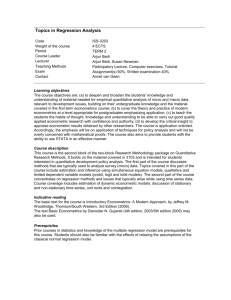
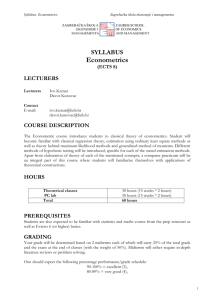
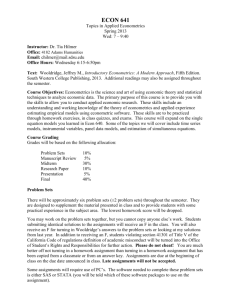
Nonstationary Time Series Data and Cointegration Prepared by Vera Tabakova, East Carolina University 12.1 Stationary and Nonstationary Variables 12.2 Spurious Regressions 12.3 Unit Root Tests for Stationarity 12.4 Cointegration 12.5 Regression When There is No Cointegration Principles of Econometrics, 3rd Edition Slide 12-2 Figure 12.1(a) US economic time series Principles of Econometrics, 3rd Edition Slide 12-3 Figure 12.1(b) US economic time series Principles of Econometrics, 3rd Edition Slide 12-4 E yt (12.1a) var yt 2 (12.1b) cov yt , yt s cov yt , yt s s Principles of Econometrics, 3rd Edition (12.1c) Slide 12-5 Principles of Econometrics, 3rd Edition Slide 12-6 yt yt 1 vt , 1 (12.2a) y1 y0 v1 y2 y1 v2 (y0 v1 ) v2 2 y0 v1 v2 yt vt vt 1 2vt 2 ..... t y0 Principles of Econometrics, 3rd Edition Slide 12-7 E[ yt ] E[vt vt 1 2vt 2 .....] 0 ( yt ) ( yt 1 ) vt yt yt 1 vt , Principles of Econometrics, 3rd Edition 1 (12.2b) Slide 12-8 E ( yt ) / (1 ) 1/ (1 0.7) 3.33 ( yt t ) ( yt 1 (t 1)) vt , yt yt 1 t vt Principles of Econometrics, 3rd Edition 1 (12.2c) Slide 12-9 Figure 12.2 (a) Time Series Models Principles of Econometrics, 3rd Edition Slide 12-10 Figure 12.2 (b) Time Series Models Principles of Econometrics, 3rd Edition Slide 12-11 Figure 12.2 (c) Time Series Models Principles of Econometrics, 3rd Edition Slide 12-12 yt yt 1 vt (12.3a) y1 y0 v1 2 y2 y1 v2 ( y0 v1 ) v2 y0 vs s 1 t yt yt 1 vt y0 vs s 1 Principles of Econometrics, 3rd Edition Slide 12-13 E ( yt ) y0 E (v1 v2 ... vt ) y0 var( yt ) var(v1 v2 ... vt ) tv2 yt yt 1 vt Principles of Econometrics, 3rd Edition (12.3b) Slide 12-14 y1 y0 v1 2 y2 y1 v2 ( y0 v1 ) v2 2 y0 vs s 1 t yt yt 1 vt t y0 vs s 1 Principles of Econometrics, 3rd Edition Slide 12-15 E ( yt ) t y0 E (v1 v2 v3 ... vt ) t y0 var( yt ) var(v1 v2 v3 ... vt ) tv2 yt t yt 1 vt Principles of Econometrics, 3rd Edition (12.3c) Slide 12-16 y1 y0 v1; (since t 1) 2 y2 2 y1 v2 2 ( y0 v1 ) v2 2 3 y0 vs s 1 t t (t 1) yt t yt 1 vt t y0 vs s 1 2 1 2 3 t t t 1 2 Principles of Econometrics, 3rd Edition Slide 12-17 rw1 : yt yt 1 v1t rw2 : xt xt 1 v2t rw1t 17.818 0.842 rw2t , (t ) Principles of Econometrics, 3rd Edition R 2 .70 (40.837) Slide 12-18 Figure 12.3 (a) Time Series of Two Random Walk Variables Principles of Econometrics, 3rd Edition Slide 12-19 Figure 12.3 (b) Scatter Plot of Two Random Walk Variables Principles of Econometrics, 3rd Edition Slide 12-20 12.3.1 Dickey-Fuller Test 1 (no constant and no trend) yt yt 1 vt (12.4) yt yt 1 yt 1 yt 1 vt yt 1 yt 1 vt (12.5a) yt 1 vt Principles of Econometrics, 3rd Edition Slide 12-21 12.3.1 Dickey-Fuller Test 1 (no constant and no trend) H0 : 1 H0 : 0 H1 : 1 H1 : 0 Principles of Econometrics, 3rd Edition Slide 12-22 12.3.2 Dickey-Fuller Test 2 (with constant but no trend) yt yt 1 vt Principles of Econometrics, 3rd Edition (12.5b) Slide 12-23 12.3.3 Dickey-Fuller Test 3 (with constant and with trend) yt yt 1 t vt Principles of Econometrics, 3rd Edition (12.5c) Slide 12-24 First step: plot the time series of the original observations on the variable. If the series appears to be wandering or fluctuating around a sample average of zero, use test equation (12.5a). If the series appears to be wandering or fluctuating around a sample average which is non-zero, use test equation (12.5b). If the series appears to be wandering or fluctuating around a linear trend, use test equation (12.5c). Principles of Econometrics, 3rd Edition Slide 12-25 Principles of Econometrics, 3rd Edition Slide 12-26 An important extension of the Dickey-Fuller test allows for the possibility that the error term is autocorrelated. m yt yt 1 as yt s vt (12.6) s 1 yt 1 yt 1 yt 2 , yt 2 yt 2 yt 3 , The unit root tests based on (12.6) and its variants (intercept excluded or trend included) are referred to as augmented Dickey-Fuller tests. Principles of Econometrics, 3rd Edition Slide 12-27 Ft 0.178 0.037 Ft 1 0.672Ft 1 (tau ) ( 2.090) Bt 0.285 0.056 Bt 1 0.315Bt 1 (tau ) Principles of Econometrics, 3rd Edition ( 1.976) Slide 12-28 yt yt yt 1 vt F t 0.340 F t 1 (tau ) ( 4.007) B t 0.679 B t 1 (tau ) Principles of Econometrics, 3rd Edition ( 6.415) Slide 12-29 eˆt eˆt 1 vt (12.7) Case 1: eˆt yt bxt (12.8a) Case 2 : eˆt yt b2 xt b1 (12.8b) Case 3: eˆt yt b2 xt b1 ˆ t (12.8c) Principles of Econometrics, 3rd Edition Slide 12-30 Principles of Econometrics, 3rd Edition Slide 12-31 Bˆt 1.644 0.832 Ft , R 2 0.881 (12.9) (t ) (8.437) (24.147) eˆt 0.314eˆt 1 0.315eˆt 1 (tau ) (4.543) Principles of Econometrics, 3rd Edition Slide 12-32 The null and alternative hypotheses in the test for cointegration are: H 0 : the series are not cointegrated residuals are nonstationary H1 : the series are cointegrated residuals are stationary Principles of Econometrics, 3rd Edition Slide 12-33 12.5.1 First Difference Stationary yt yt 1 vt yt yt yt 1 vt The variable yt is said to be a first difference stationary series. Principles of Econometrics, 3rd Edition Slide 12-34 yt yt 1 0 xt 1xt 1 et (12.10a) yt yt 1 vt yt vt yt yt 1 0 xt 1xt 1 et Principles of Econometrics, 3rd Edition (12.10b) Slide 12-35 yt t vt yt t vt yt yt1 0 xt 1xt1 et (12.11) yt t yt 1 0 xt 1 xt 1 et where 1 (1 1 ) 2 (0 1 ) 11 1 2 and 1 (1 1 ) 2 (0 1 ) Principles of Econometrics, 3rd Edition Slide 12-36 To summarize: If variables are stationary, or I(1) and cointegrated, we can estimate a regression relationship between the levels of those variables without fear of encountering a spurious regression. If the variables are I(1) and not cointegrated, we need to estimate a relationship in first differences, with or without the constant term. If they are trend stationary, we can either de-trend the series first and then perform regression analysis with the stationary (de-trended) variables or, alternatively, estimate a regression relationship that includes a trend variable. The latter alternative is typically applied. Principles of Econometrics, 3rd Edition Slide 12-37 Augmented Dickey-Fuller test Autoregressive process Cointegration Dickey-Fuller tests Mean reversion Order of integration Random walk process Random walk with drift Spurious regressions Stationary and nonstationary Stochastic process Stochastic trend Tau statistic Trend and difference stationary Unit root tests Principles of Econometrics, 3rd Edition Slide 12-38