File
advertisement

Term 332
EE3010: Signals and Systems Analysis
2. Introduction to Signal and Systems
Dr. Mujahed Al-Dhaifallah
EE3010_Lecture2
Al-Dhaifallah_Term332
1
Dr. Mujahed Al-Dhaifallah
مجاهد آل ضيف هللا.د
Office: Dean Office.
E-mail: muja2007hed@gmail.com
Telephone: 7842983
Office Hours: SMT, 1:30 – 2:30 PM,
or by appointment
EE3010_Lecture2
Al-Dhaifallah_Term332
2
Rules and Regulations
No
make up quizzes
DN grade == 25% unexcused absences
Homework Assignments are due to the
beginning of the lectures.
Absence is not an excuse for not
submitting the Homework.
EE3010_Lecture2
Al-Dhaifallah_Term332
3
Grading Policy
Exam 1 (10%),
Exam 2 (15%)
Final Exam (60%),
Quizzes (5%)
HWs (5%)
Attendance & class participation (5%), penalty for late
attendance
Note: No absence, late homework submission
allowed without genuine excuse.
EE3010_Lecture2
Al-Dhaifallah_Term332
4
Homework
Send me e-mail
Subject Line: “EE 3010 Student”
EE3010_Lecture2
Al-Dhaifallah_Term332
5
The Course Goal
To introduce the mathematical tools for
analysing signals and systems in the
time and frequency domain and to
provide a basis for applying these
techniques in electrical engineering.
EE3010_Lecture2
Al-Dhaifallah_Term332
6
Course Objectives
1.
2.
3.
4.
5.
6.
Identify the types of signals and their characterization.
Use the Fourier series representation.
Differentiate between the continuous and discretetime Fourier transforms.
Grasp the fundamental concepts of the Laplace and Z
transforms.
Characterize signals and systems in the frequency
domain.
Apply signals and systems concepts in various
engineering applications.
EE3010_Lecture2
Al-Dhaifallah_Term332
7
Course Syllabus
1. Signal and Systems : Introduction,
Continuous and discrete-time signals, Basic
system properties.
2. Linear Time-Invariant (LTI) Systems:
Convolution, LTI systems properties,
Continuous and discrete-time LTI causal
systems.
3. Fourier series Representation of Periodic
Systems: LTI system response to complex
exponentials, Properties of Fourier series,
Applications to filtering, Examples of filters.
EE3010_Lecture2
Al-Dhaifallah_Term332
8
Course Outlines
4. Continuous-Time Fourier Transform:
Fourier transform of aperiodic and periodic
signals, Properties, Convolution and
multiplication properties, Frequency
response of LTI systems.
5. Discrete-Time Fourier Transform:
Overview of Discrete-time equivalents of
topics covered in chapter 4.
EE3010_Lecture2
Al-Dhaifallah_Term332
9
Course Outlines
6. Laplace transform (Laplace transform as
Fourier transform with convergence factor.
Properties of the Laplace transform
7. z transform. Properties of the z transform.
Examples. Difference equations and
differential equations. Digital filters.
EE3010_Lecture2
Al-Dhaifallah_Term332
10
Signals & Systems Concepts
Specific Objectives:
•
•
•
Introduce, using examples, what is a signal
and what is a system
Why mathematical models are appropriate
What are continuous-time and discrete-time
representations and how are they related
EE3010_Lecture2
Al-Dhaifallah_Term332
11
Recommended Reading Material
•
•
Signals and Systems, Oppenheim &
Willsky, Section 1
Signals and Systems, Haykin & Van
Veen, Section 1
EE3010_Lecture2
Al-Dhaifallah_Term332
12
What is a Signal?
Signals are functions that carry information.
Such information is contained in a pattern of
variation of some form.
Examples of signal include:
Electrical signals
–
Acoustic signals
–
Acoustic pressure (sound) over time
Mechanical signals
–
Voltages and currents in a circuit
Velocity of a car over time
Video signals
–
EE3010_Lecture2
Intensity level of a pixel (camera, video) over time
Al-Dhaifallah_Term332
13
How is a Signal Represented?
Mathematically, signals are represented as a
function of one or more independent variables.
For instance a black & white video signal intensity
is dependent on x, y coordinates and time t f(x,y,t)
In this course, we shall be exclusively concerned
with signals that are a function of a single
variable: time f(t)
t
EE3010_Lecture2
Al-Dhaifallah_Term332
14
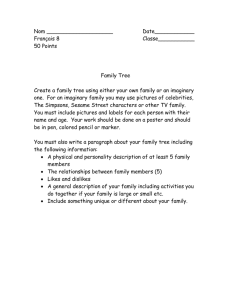
Example: Signals in an Electrical
Circuit
R
vs
i
C
vc
The signals vc and vs are patterns of variation over time
Step (signal) vs at t=1
RC = 1
First order (exponential)
response for vc
vs, vc
+
-
vs (t ) vc (t )
R
dv (t )
i (t ) C c
dt
dvc (t ) 1
1
vc (t )
vs (t )
dt
RC
RC
i (t )
Note, we could also have considered the voltage across the resistor
or the current as signals
EE3010_Lecture2
Al-Dhaifallah_Term332
15
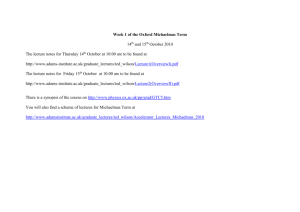
Continuous & Discrete-Time Signals
Continuous-Time Signals
x(t)
Most signals in the real world are continuous time,
as the scale is infinitesimally fine.
Eg voltage, velocity,
Denote by x(t), where the time interval may be
bounded (finite) or infinite
t
Discrete-Time Signals
Some real world and many digital signals are
discrete time, as they are sampled
E.g. pixels, daily stock price (anything that a
digital computer processes)
Denote by x[n], where n is an integer value that
varies discretely
Sampled continuous signal
x[n] =x(nk) – k is sample time
EE3010_Lecture2
Al-Dhaifallah_Term332
x[n]
n
16
Signal Properties
In this course, we shall be particularly
interested in signals with certain properties:
Periodic signals: a signal is periodic if it repeats
itself after a fixed period T, i.e. x(t) = x(t+T) for all t.
A sin(t) signal is periodic.
Even and odd signals: a signal is even if x(-t) =
x(t) (i.e. it can be reflected in the axis at zero). A
signal is odd if x(-t) = -x(t). Examples are cos(t)
and sin(t) signals, respectively
EE3010_Lecture2
Al-Dhaifallah_Term332
17
Signal Properties
Exponential and sinusoidal signals: a signal is
(real) exponential if it can be represented as x(t) =
Ceat. A signal is (complex) exponential if it can be
represented in the same form but C and a are
complex numbers.
Step and pulse signals: A pulse signal is one
which is nearly completely zero, apart from a short
spike, d(t). A step signal is zero up to a certain
time, and then a constant value after that time, u(t).
These properties define a large class of tractable,
useful signals and will be further considered in the
coming lectures
EE3010_Lecture2
Al-Dhaifallah_Term332
18
What is a System?
Systems process input signals to
produce output signals
Examples:
A circuit involving a capacitor can be viewed
as a system that transforms the source
voltage (signal) to the voltage (signal)
across the capacitor
A CD player takes the signal on the CD and
transforms it into a signal sent to the loud
speaker
EE3010_Lecture2
Al-Dhaifallah_Term332
19
Examples
A communication system is generally composed of
three sub-systems, the transmitter, the channel and
the receiver. The channel typically attenuates and
adds noise to the transmitted signal which must be
processed by the receiver
EE3010_Lecture2
Al-Dhaifallah_Term332
20
How is a System Represented?
A system takes a signal as an input and
transforms it into another signal
Input signal
x(t)
System
Output signal
y(t)
In a very broad sense, a system can be
represented as the ratio of the output signal
over the input signal
That way, when we “multiply” the system by the
input signal, we get the output signal
This concept will be firmed up in the coming weeks
EE3010_Lecture2
Al-Dhaifallah_Term332
21
Continuous & Discrete-Time
Mathematical Models of Systems
Continuous-Time Systems
Most continuous time systems
represent how continuous signals
are transformed via differential
equations.
E.g. circuit, car velocity
Discrete-Time Systems
dvc (t ) 1
1
vc (t )
vs (t )
dt
RC
RC
dv(t )
m
v(t ) f (t )
dt
First order differential equations
y[n] 1.01y[n 1] x[n]
m
Most discrete time systems
v[n]
v[n 1]
f [ n]
represent how discrete signals are
m
m
transformed via difference
equations
dv(n) v(n) v(( n 1))
E.g. bank account, discrete car
dt
velocity system
First order difference equations
EE3010_Lecture2
Al-Dhaifallah_Term332
22
Properties of a System
In this course, we shall be particularly
interested in systems with certain
properties:
•
•
Causal: a system is causal if the output at a
time, only depends on input values up to
that time.
Linear: a system is linear if the output of the
scaled sum of two input signals is the
equivalent scaled sum of outputs
EE3010_Lecture2
Al-Dhaifallah_Term332
23
Properties of a System
Time-invariance: a system is time invariant
if the system’s output signal is the same,
given the same input signal, regardless of
time of application.
These properties define a large class of
tractable, useful systems and will be
further considered in the coming lectures
EE3010_Lecture2
Al-Dhaifallah_Term332
24
How Are Signal & Systems Related (i)?
How to design a system to process a signal in particular
ways?
Design a system to restore or enhance a particular signal
–
–
Assume a signal is represented as
Remove high frequency background communication noise
Enhance noisy images from spacecraft
x(t) = d(t) + n(t)
Design a system to remove the unknown “noise”
component n(t), so that y(t) d(t)
x(t) = d(t) + n(t)
EE3010_Lecture2
System
?
Al-Dhaifallah_Term332
y(t) d(t)
25
How Are Signal & Systems Related (ii)?
How to design a system to extract specific
pieces of information from signals
–
–
Estimate the heart rate from an electrocardiogram
Estimate economic indicators (bear, bull) from
stock market values
Assume a signal is represented as
x(t) = g(d(t))
Design a system to “invert” the transformation
g(), so that y(t) = d(t)
x(t) = g(d(t))
EE3010_Lecture2
System
?
Al-Dhaifallah_Term332
y(t) = d(t) = g-1(x(t))
26
How Are Signal & Systems Related (iii)?
How to design a (dynamic) system to modify or control
the output of another (dynamic) system
–
–
Assume a signal is represented as
Control an aircraft’s altitude, velocity, heading by adjusting throttle,
rudder, ailerons
Control the temperature of a building by adjusting the heating/cooling
energy flow.
x(t) = g(d(t))
Design a system to “invert” the transformation g(), so
that y(t) = d(t)
x(t)
EE3010_Lecture2
dynamic
system ?
y(t) = d(t)
Al-Dhaifallah_Term332
27
Lecture 2: Exercises
Read SaS OW, Chapter 1. This contains
most of the material in the first three lectures,
a bit of pre-reading will be extremely useful!
SaS OW:
Q1.1
Q1.2
Q1.4
Q1.5
Q1.6
In lecture 3, we’ll be looking at signals in
more depth.
EE3010_Lecture2
Al-Dhaifallah_Term332
28
A1. Review of Complex Numbers
EE3010_Lecture2
Al-Dhaifallah_Term332
29
Complex Numbers
Complex numbers: number of the form
z=x+j y
where x and y are real numbers and j 1
x: real part of z; x = Re {z}
y: imaginary part of z; y = Im {z}
EE3010_Lecture2
Al-Dhaifallah_Term332
30
Complex Numbers
Two complex numbers z1 and z 2 are equal
if and only if their respective real and
imaginary parts are equal
z1 x1 j y1 ;
z 2 x2 j y 2
z1 z 2
EE3010_Lecture2
x1 x2
y1 y2
Al-Dhaifallah_Term332
31
Representing Complex numbers
Rectangular representation
Imaginary axis
Imaginary Part
y
s1=x + j y
x
Complex-plane
real axis
Real part
(s-plane)
EE3010_Lecture2
Al-Dhaifallah_Term332
32
Representing Complex numbers
Polar representation
Imaginary axis
s1 x jy e j
Imaginary Part
ρ
: length of s1
θ
s1
y
x
real axis
: phase angle
Real part
Complex-plane
(s-plane)
EE3010_Lecture2
Al-Dhaifallah_Term332
33
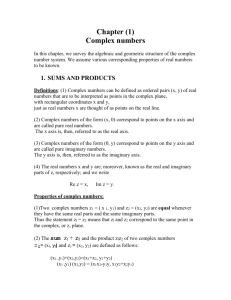
Conversion between Representations
Example
Imaginary axis
s1 3 j 4 5 e j 0.9273
4
imaginary part
tan
real part
1
θ
3
real axis
magnitude
s1 32 42 5
phase angle 0.9273 ( radian )
EE3010_Lecture2
Al-Dhaifallah_Term332
34
Euler Formula
j
e cos( ) j sin( )
1
s1 3 j 4 5 e j 0.9273
4
tan
0.9273
3
5 cos(0.9273) j 5sin (0.9273)
4
θ
3
EE3010_Lecture2
Al-Dhaifallah_Term332
35
Complex Numbers
Addition /Subtraction
z1 x1 j y1 ;
z 2 x2 j y 2
z1 z2 ( x1 x2 ) j ( y1 y2 )
z1 z2 ( x1 x2 ) j ( y1 y2 )
(2 j 3) (5 j 4) 8 (2 5 8) j (3 4 0)
1 j
EE3010_Lecture2
Al-Dhaifallah_Term332
36
Complex Numbers
Multiplication/Division
j1
z1 x1 j y1 r1 e ;
z 2 x2 j y2 r2 e
j 2
z1 z 2 ( x1 x2 y1 y2 ) j ( x1 y2 x2 y1 )
y1 x2 y2 x1
z1 x1 x2 y1 y2
j
2
2
2
2
x2 y 2
x2 y 2
z2
z1 z 2 r1r2 e
j 1 2
z1 r1 j 1 2
e
z 2 r2
EE3010_Lecture2
Al-Dhaifallah_Term332
37
Operations
Examples
s 1 j 3
z 2 j5
s z ( 1 2) j (3 5) 1 j8
s z 1 j 32 j5 17 j
s 1 j 3 13 j11
2 j5
z
29
EE3010_Lecture2
Al-Dhaifallah_Term332
38
More Examples
s 2e
j2
z 3e
j
s z 2e
j2
3e
j
(2 3)e
j ( 2 1)
6e
j
j2
s 2e
2 3j
j e
z 3e
3
EE3010_Lecture2
Al-Dhaifallah_Term332
39
Conjugate
Imaginary axis
s x jy
s : complex conjugate of s
s x jy
s x jy
real axis
s x jy
Complex-plane
(s-plane)
EE3010_Lecture2
Al-Dhaifallah_Term332
40
Conjugate
s x jy
s x jy
ss x y
2
2
s s sx y
2
EE3010_Lecture2
2
2
Al-Dhaifallah_Term332
41
Conjugate
s 1 j 2
s 1 j 2
ss x y 5
2
2
s s s x y 5
2
EE3010_Lecture2
2
2
Al-Dhaifallah_Term332
42
Conjugate
real/imaginary part
s x jy
s x jy
(s s )
Re{ s} x
2
(s s )
Im{ s} y
2j
EE3010_Lecture2
Al-Dhaifallah_Term332
43
Operations
Polar coordinate Multiplication/Division
j1
s1 1e ,
s1 s2 1e
s2 2e
j1
j 2
e e
j 2
2
1
j 1 2
2
j1
s1
1e
1 j 1 2
e
j 2
s2 2e
2
EE3010_Lecture2
Al-Dhaifallah_Term332
44
More Examples
(2 j 2) (1 j ) (4 0 j )
2(1 j ) (1 j ) 2(1 1) 4
2 2 e j / 4
EE3010_Lecture2
2 e j / 4 4 e j 0 4
Al-Dhaifallah_Term332
45
Keywords
Conjugate
Modulus
Real part
Imaginary part
Polar coordinates
Complex plane
Imaginary axis
Pure imaginary
EE3010_Lecture2
Al-Dhaifallah_Term332
46