directional derivative
advertisement

CS 485 / 685
Computer Vision
Instructor: Mircea Nicolescu
Lecture 7
Second Derivative in 2D: Laplacian
• The Laplacian:
2
Second Derivative in 2D: Laplacian
• The Laplacian can be
implemented using the mask:
3
Variations of Laplacian
4
Laplacian - Example
• Example:
mask:
• Example:
5
Properties of Laplacian
• It is an isotropic operator.
• It is cheaper to implement than the gradient (one
mask only).
• It does not provide information about edge
direction.
• It is more sensitive to noise (differentiates twice).
6
Properties of Laplacian
• How do we estimate the edge strength?
• Four cases of zero-crossings :
−
−
−
−
{+,-}
{+,0,-}
{-,+}
{-,0,+}
• Slope of zero-crossing {a, -b} is |a+b|.
• To mark an edge:
− compute slope at zero-crossing
− apply a threshold to slope
7
Laplacian of Gaussian (LoG)
• The Marr-Hildreth edge detector
− Uses the Laplacian-of-Gaussian (LoG)
− To reduce the noise effect, the image is first smoothed with a lowpass filter.
− In the case of the LoG, the low-pass filter is chosen to be a
Gaussian.
(σ determines the degree of smoothing, mask size increases with σ)
8
Laplacian of Gaussian (LoG)
− It can be shown that:
2 [ f ( x, y ) G( x, y )] 2G( x, y ) f ( x, y )
x y 2
2G ( x, y )
4
2
2
2
e
x2 y2
2 2
(inverted LoG)
9
Laplacian of Gaussian (LoG)
• Masks:
10
Laplacian of Gaussian (LoG)
• Example
I * 2G
I
Zero crossings of I * ( 2G)
11
Separability
− Gaussian:
− A 2-D Gaussian can be separated into two 1-D Gaussians
− Perform 2 convolutions with 1-D Gaussians
I ( x, y ) * g ( x, y )
k2 multiplications per pixel
I ( x, y) * g ( x)* g ( y)
2k multiplications per pixel
g ( x) .011 .13 .6 1 .6 .13 .011
.011
.13
.6
g ( y) 1
.6
.13
.011
12
Separability
− Laplacian-of-Gaussian:
I * 2 g
Requires k2 multiplications per pixel
I g
yy
( y ) g ( x) I g xx ( x) g ( y )
Requires 4k multiplications per pixel
13
Separability
Gaussian Filtering
Image
g(x)
g(y)
+
Ig
+
I * 2 g
Laplacian-of-Gaussian Filtering
gyy(y)
g(x)
Image
gxx(x)
g(y)
14
Separability of LoG
Steps:
15
Laplacian of Gaussian (LoG)
• Marr-Hildteth (LoG) Algorithm:
− Compute LoG
2 g ( x, y )
− Use one 2D filter:
g ( x), g xx ( x), g ( y ), g yy ( y )
− Use four 1D filters:
− Find zero-crossings from each row and column
− Find slope of zero-crossings
− Apply threshold to slope and mark edges
16
Gradient vs LoG
• Gradient vs. LoG – a comparison
− Gradient works well when the image contains sharp intensity
transitions
− Zero-crossings of LoG offer better localization, especially when the
edges are not very sharp
step edge
ramp edge
17
Gradient vs LoG
• Disadvantage of LoG edge detection:
− Does not handle corners well
18
Gradient vs LoG
• Disadvantage of LoG edge detection:
− Does not handle corners well
− Why?
The derivative of the Gaussian:
The Laplacian of the Gaussian:
(unoriented)
19
Difference of Gaussians (DoG)
• The Difference-of-Gaussians (DoG)
− Approximates the LoG filter with a filter that is the difference of two
differently sized Gaussians – a DoG filter (“Difference of
Gaussians”).
− The image is first smoothed by convolution with a Gaussian kernel
of scale 1
g1 x, y G 1 x, y * f x, y
− A second image is obtained by smoothing with a Gaussian kernel
of scale 2
g 2 x, y G 2 x, y * f x, y
20
Difference of Gaussians (DoG)
− Their difference is:
g1 x, y g 2 x, y
G 1 x, y * f x, y G 2 x, y * f x, y
G 1 G 2 * f x, y DoG * f x, y
− The DoG as an operator or convolution kernel is defined as:
DoG G 1 G 2 e
approximation
x2 y2
2 12
e
x2 y2
2 22
actual LoG
21
Difference of Gaussians (DoG)
σ=1
σ=2
difference
22
Edge Detection Using Directional Derivative
• The second directional derivative
− This is the second derivative computed in the direction of the
gradient.
23
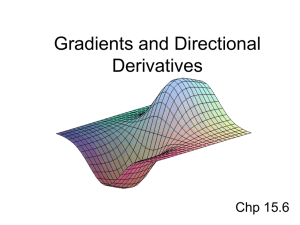
Directional Derivative
f
• The partial derivatives of f(x,y) will give the slope
∂f/∂x in the positive x direction and the slope
∂f /∂y in the positive y direction.
• We can generalize the partial derivatives to
calculate the slope in any direction (i.e.,
directional derivative).
24
Directional Derivative
• Directional derivative computes intensity changes
in a specified direction.
Compute
derivative
in direction u
25
Directional Derivative
(From vector calculus)
+
Directional
derivative is a
linear
combination of
partial
derivatives.
=
26
Directional Derivative
uy
ux
cos , sin
u
u
||u||=1
u x cos , u y sin
=
+
cosθ
sinθ
27
Higher Order Directional Derivatives
f
f
f ( x, y )
cos sin
x
y
'
2
2
2
f
f
f
''
2
2
f ( x, y )
cos
2
cos
sin
sin
2
2
x
xy
y
f''' ( x, y)
3 f
x3
cos 3
3
3 f
x 2 y
cos sin 3
2
3 f
xy
cos sin
2
2
3 f
y3
sin 3
28
Edge Detection Using Directional Derivative
• What direction would you use for edge detection?
Direction of gradient:
f
x cos
f sin
y
29
Edge Detection Using Directional Derivative
• Second directional derivative along gradient
direction:
2
2
2
f
f
f
''
2
2
f ( x, y )
cos
2
cos
sin
sin
2
2
x
xy
y
f
x cos
f sin
y
30
Properties of Second Directional Derivative
31
Facet Model
• Assumes that an image is an array of samples of
a continuous function f(x,y).
• Reconstructs f(x,y) from sampled pixel values.
• Uses directional derivatives which are computed
analytically (without using discrete
approximations).
z=f(x,y)
32
Facet Model
• For complex images, f(x,y) could
contain extremely high powers
of x and y.
• Idea: model f(x,y) as a piecewise function.
• Approximate each pixel value by
fitting a bi-cubic polynomial in a
small neighborhood around the
pixel (facet).
33
Facet Model
Steps
(1) Fit a bi-cubic polynomial to a small neighborhood of
each pixel (this step provides smoothing too).
(2) Compute (analytically) directional derivatives in the
direction of gradient.
(3) Find points where the second derivative is equal to
zero
34
Anisotropic Filtering
• Symmetric Gaussian smoothing tends to blur out edges
rather aggressively.
• An “oriented” smoothing operator (edge-preserving
smoothing) would work better:
(i) Smooth aggressively perpendicular to the gradient
(ii) Smooth little along the gradient
• Mathematically formulated using diffusion
equation.
35
Anisotropic Filtering – Example
result using
anisotropic filtering
36
Effect of Scale
original
– Small σ detects fine features.
– Large σ detects large scale edges.
37
Multi-Scale Processing
• A formal theory for handling image structures at
multiple scales.
• Determine which structures (e.g., edges) are most
significant by considering the range of scales
over which they occur.
38
Multi-Scale Processing
σ=1
σ=2
σ=4
σ=8
σ=16
• Interesting scales: scales at which important structures
are present
• e.g., in the image above, people can be detected at scales 1-4
39
Scale Space
• Detect and plot the zerocrossings of a 1D function
over a continuum of
scales σ.
Gaussian
filtered signal
• Instead of treating zerocrossings at a single scale
as a single point, we can
now treat them at multiple
scales as contours.
σ
x
40
Scale Space
• Properties of scale space
(assuming Gaussian
smoothing):
− Zero-crossings may shift
with increasing scale ().
− Two zero-crossing may
merge with increasing scale.
− A contour may not split in
two with increasing scale.
41
Multi-Scale Processing
42
Multi-Scale Processing
43
Edge Detection is Just the Beginning…
image
human segmentation
gradient magnitude
• Berkeley segmentation database:
http://www.eecs.berkeley.edu/Research/Projects/CS/vision/grouping/segbench/
44
Math Review
•
•
•
•
•
Vectors
Matrices
SVD
Linear systems
Geometric transformations
45
n-Dimensional Vector
• An n-dimensional vector v is denoted as:
• Its transpose vT is denoted as:
46
Vector Normalization
• Vector normalization unit length vector
|| v || x12 x22 ... xn2
Example:
47
Inner (or Dot) Product
• Given
vT = (x1, x2, . . . , xn)
wT = (y1, y2, . . . , yn)
their dot product is defined as:
and
(scalar)
or
48
Defining Magnitude Using Dot Product
• Magnitude definition:
Dot product definition:
|| v || x12 x22 ... xn2
Therefore:
|| v ||2 v.v or || v || v.v vT v
n
2
x
i
i 1
49
Geometric Definition of Dot Product
θ corresponds to the smaller angle between u and v
50
Geometric Definition of Dot Product
The sign of u.v depends on cos(θ)
51
Vector (Cross) Product
u
w
u v w
v
The cross product is a VECTOR!
Magnitude:
Orientation:
|| u |||| v || || w || sin
u v u v (v w) v 0
u w u w (v w) w 0
52
Vector Product Computation
u v w ( x1 , x2 , x3 ) ( y1 , y2 , y3 )
u
i
u x1
j
x2
k
x3
y1
y2
y3
w
v
( x2 y3 x3 y2 )i ( x3 y1 x1 y3 ) j ( x1 y2 x2 y1 )k
53