Chapter 4 Pure Bendi..
advertisement

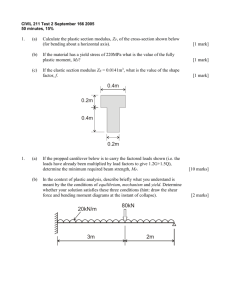
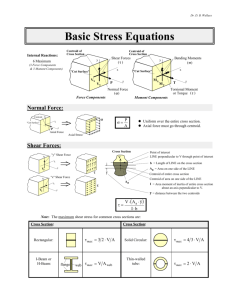
Chapter 4 Pure Bending Ch 2 – Axial Loading Ch 3 – Torsion Ch 4 – Bending -- for the designing of beams and girders 4.1 Introduction A. Eccentric Loading B. Pure Bending 4.2 Symmetric Member in Pure Bending M = Bending Moment Sign Conventions for M: -- concave upward ⊝ -- concave downward Force Analysis – Equations of Equilibrium xz = xy = 0 Fx = 0 My-axis = 0 z Mz-axis = 0 ( y x dA 0 x dA 0 x dA) M (4.1) (4.2) (4.3) 4.3 Deformation in a Symmetric Member in Pure Bending Plane CAB is the Plane of Symmetry Assumptions of Beam Theory: 1. Any cross section to the beam axis remains plane 2. The plane of the section passes through the center of curvature (Point C). The Assumptions Result in the Following Facts: 1. xy = xz = 0 xy = xz = 0 2. y = z = yz = 0 The only non-zero stress: x 0 Uniaxial Stress The Neutral Axis (surface) : x = 0 & x = 0 L Line DE (4.4) Where = radius of curvature = the central angle L ( y ) ' Before deformation: DE = JK Therefore, L' L ( y ) y (4.6) Line JK (4.5) The Longitudinal Strain x = o x L x y y (4.8) x varies linearly with the distance y from the neutral surface The max value of x occurs at the top or the bottom fiber: m c (4.9) Combining Eqs (4.8) & (4.9) yields y x m c (4.10) 4.4 Stresses and Deformation is in the Elastic Range For elastic response – Hooke’s Law x E x (4.11) y (4.10) x m c y E x ( E m ) c Therefore, y y x m max c c (4.12) Based on Eq. (4.1) x dA 0 (4.1) y y x m max (4.12) c c y m x dA ( c m )dA c ydA 0 Hence, ydA first moment of area 0 (4.13) Therefore, Within elastic range, the neutral axis passes through the centroid of the section. According to Eq. (4.3) and It follows or y x m c ( y xdA) M (4.3) (4.12) y ( y)( c m )dA M m c 2 y dA M (4.14) Since Eq. (4.24) I y 2dA m c 2 y dA M can be written as Mc m I Elastic Flexure Formula (4.15) At any distance y from the neutral axis: My x I Flexural Stress (4.16) If we define I Elastic section modulus = S = c (4.17) Eq. (4.15) can be expressed as M m S (4.18) Solving Eq. (4.9) m 1 1 c m c (4.9) m m E m 1 Mc Ec Ec I Finally, we have M EI [ 1 (4.21) Mc m ] I 1 3 bh I 12 1 2 1 S bh Ah h c 6 6 2 4.5 Deformation in a Transverse Cross Section Assumption in Pure Bending of a Beam: The transverse cross section of a beam remains “plane”. y x ,x z x y Since x Hence, y y Therefore, x ⓛ A. Material above the neutral surface (y>0), (4.8) y z y , z (4.22) ⓛ However, this plane may undergo in-plane deformations. , z ⓛ y ⓛ B. Material below the neutral surface (y<0), As a consequence, Analogous to Eq. (4.8) x y y x For the transverse plane: ' y y y x 1 y x x , x = radius of curvature, 1/ = curvature Anticlastic curvature = ' 1 (4.23) 4.6 Bending of Members Made of Several Materials (Composite Beams) From Eq. (4.8) x y E1 y For Material 1: 1 E1 x For Material 2: 2 E2 x E2 y dF1 1dA dF2 2 dA E1 y E2 y dA dA Designating E2 = nE1 dF2 (nE1 ) y dA E1 y (ndA) My x I Notes: 1. The neutral axis is calculated based on the transformed section. 2. 2 n x 3. I = the moment of inertia of the transformed section 4. Deformation -- 1 M E1 I Beam with Reinforced Members: As = area of steel, Ac = area of concrete Es = modulus of steel, Ec = modulus of concrete n= Es/Ec Beam with Reinforced Members: As = area of steel, Ac = area of concrete Es = modulus of steel, Ec = modulus of concrete n= Es/Ec x (bx) nAs (d x) 0 2 1 2 bx nAs x nAs d 0 2 determine the N.A. 4.7 Stress Concentrations Mc m K I 4.12 Eccentric Axial Loading in a Plane of Symmetry x ( x )centric ( x )bending P My x A I 4.13 Unsymmetric Bending -- Two planes of symmetry y – axis & z-axis -- Single plane of symmetry – y-axis --M coincides with the N.A. For an arbitrary geometry + M applies along the N.A Fx = 0 dA 0 (the Centroid = the N.A.) My = 0 z x dA 0 (moment equilibrium) Mz = 0 ( y dA) M (moment equilibrium) Substituting x x x m y c into Eq. (4.2) (4.1) (4.2) (4.3) Plane of symmetry m y We have z( or yzdA I c )dA 0 or yz 0 m c z( y )dA 0 (knowing m/c = constant) Iyz = 0 indicates that y- and z-axes are the principal centroid of the cross section. Hence, the N.A. coincides with the M-axis. If the axis of M coincides with the principal centroid axis, the superposition method can be used. = Case A = + M y M sin M z M cos For Case A For Case B x x Mzy Iz M yz For the combined cases : Case B (4.53) (4.54) Iy Mz y M yz x Iz Iy (4.55) The N.A. is the surface where x = 0. By setting x = 0 in Eq. (4.55), one has Mz y M yz 0 Iz Iy Solving for y and substituting for Mz and My from Eq. (4.52), y( This is equivalent to Iz tan ) z Iy (4.56) Iz y / z m slope tan I y The N.A. is an angle from the z-axis: Iz tan tan Iy (4.57) 4.14 General Case of Eccentric Axial loading P MZ y M yz x A Iz Iy My Mz P y z Iz Iy A (4.58) (4.58) 4.15 Bending of Curved Members After bending Before bending Length of N.A. before and after bending The elongation of JK line Since We have r R y r ' R' y ( R ' y ) ' ( R y ) R R ' ' (4.59) r ' ' r (4.60) (4.61) If we define - = and knowing R = R , thus y (4.62) Based on the definition of strain, we have y x r r Substituting r R y (4.63) into the above equation, x Also, x = E x x y R y E y R y (4.64) (4.65) Plotting x E y R y x is not a linear function of y. Since r R y y = R – r, therefore, x E R r r Substituting this eq. into Eq. (4.1) E R r dA 0 r Rr r dA 0 or x dA 0 and E R r dA 0 r dA R dA 0 r E cos t . Therefore, R can be determined by the following equation: R Or in an alternative format: A dA r (4.66) 1 1 1 dA R A r The centroid of the section is determined by 1 r rdA A (4.67) Comparing Eqs. (4.66) and (4.67), we conclude that: The N.A. axis does not pass through the Centroid of the cross section. (4.59) Mz = M Since E R r r ydA M y R r , it follows E ( R r ) 2 dA M r or E [R2 dA 2 RA rdA] M r Recalling Eqs. (4-66) and (4.67), we have E Finally, E ( RA 2 RA rA) M M A(r R) (4.68) By defining e r R , the above equation takes the new form E M Ae (4.69) Substituting this expression into Eqs. (4.64) and (4-65), we have My x Ae( R y ) and M (r R) x Aer Determination of the change in curvature: From Eq. (4.59) Since ' 1 1 ' ' R R and from Eq. (4.69), one has 1 1 1 M (1 ) (1 ) ' R R R EAe (4.70, 71) Hence, the change of curvature is 1 1 M ' R R EAeR End of Ch 4 (4.72) E R r x r P MZ y M yz x A Iz Iy 1 2 1 2 x ( x )centric ( x )bending P My x A I z ( my c (4.58) (4.58) )dA 0 yzdA 0 (4.58) (4.58) 1 2 1 2 1 2 x (bx) nAs (d x) 0 2 1 2 bx nAs x nAs d 0 2 Mc m K I c M b y x dy c c M 2b y x dy 0 MU c RB I A R r 2 dA r1 r h R r2 ln r1 bh r2 bdr r1 r h r2 dr r1 r Z Mp Y bc 2 Y Y 1 2 bc bh 4 1 2 S bh 6 1 2 bh Z 4 3 k S 1 bh 2 2 6 FP M Pd 2 1 RY bc Y 2 R p bc Y 4 2 2 M Y ( c) RY bc Y 3 3 M p cR p bc 2 Y M p kM Y M p Z Y Z Y Z k M Y S Y S Mp 2 1 y M bc 2 Y (1 Y2 ) 3c 3 1 yY2 M M Y (1 2 ) 2 3c 3 M p MY 2 yY Y c Y Y yY c Y 3 1 2 M M Y (1 ) 2 2 3 Y 1 MY Y c I b(2c)3 2 2 bc c 12c 3 2 2 M Y bc Y 3 x yY Y yY y M 2b y ( 0 Y yY c y )dy 2b y ( Y )dy 2 2 byY Y bc 2 Y byY2 Y 3 yY Iz tan tan Iy (4.58) My Mz P y z Iz Iy A (4.58) (4.58)