Constraint Satisfaction and Constraint Programming
advertisement

The Theory and Practice
of Constraint Programming:
An Overview
Brahim Hnich
Faculty of Computer Science
Izmir University of Economics
Izmir, Turkey
Quotation
“Constraint programming represents one
of the closest approaches computer
science has yet made to the Holy Grail
of programming: the user states the
problem, the computer solves it.”
Eugene C. Freuder, Constraints, April 1997
21/03/2016
A CP Tutorial: Hnich
2
Caveat
•In this talk:
Constraint programming for combinatorial problems
“Programming” refers to its roots in computer
science (programming languages)
21/03/2016
A CP Tutorial: Hnich
3
Outline
•Modelling
•Constraint propagation
•Search
•Demo: Lot-sizing with stochastic non-stationary
demand
21/03/2016
A CP Tutorial: Hnich
4
A Puzzle
• Place the numbers 1 through 8 in the nodes
such that:
Each number appears exactly once
No connected nodes have consecutive numbers
?
21/03/2016
?
?
?
?
?
?
A CP Tutorial: Hnich
?
5
Modeling
• Each node a decision variable
• {1, …, 8} values in the domain of each
variable
• No consecutive numbers a constraint
(vi, vj) |vi – vj| > 1
• All values used a clique of not-equals
constraints
forall i<j. vi ≠ vj,
21/03/2016
A CP Tutorial: Hnich
6
Modeling
• Each node a decision variable
• {1, …, 8} values in the domain of each
variable
• No consecutive numbers a constraint
(vi, vj) |vi – vj| > 1
• All values used
forall i<j. vi ≠ vj,
Or more compactly, all-different[v1,…,v8]
21/03/2016
A CP Tutorial: Hnich
7
Heuristic Search
{1, 2, 3, 4, 5, 6, 7, 8}
?
21/03/2016
?
?
1?
8?
?
?
A CP Tutorial: Hnich
?
8
Inference/Propagation
{1, 2, 3, 4, 5, 6, 7, 8}
?
?
?
1?
8?
?
?
?
{1, 2, 3, 4, 5, 6, 7, 8}
21/03/2016
A CP Tutorial: Hnich
9
Inference/Propagation
{3, 4, 5, 6}
{3, 4, 5, 6}
3?
6?
{3, 4, 5, 6, 7}
7?
{2, 3, 4, 5, 6}
1?
8?
4?
5?
{3, 4, 5, 6}
21/03/2016
2?
{3, 4, 5, 6}
A CP Tutorial: Hnich
10
An OPL Model
int N=8;
struct edge{int x; int y;};
{edge} Edges ={<1,2>, <1,3>,…,<7,8>};
range Nodes 1..N;
range Values 1..N;
var int Solution[Nodes] in Values;
solve{
forall(e in Edges)
abs(Solution[e.x] - Solution[e.y]) >1;
alldifferent(Solution);
};
21/03/2016
A CP Tutorial: Hnich
11
The Core of Constraint Computation
Modelling
Solving
Heuristic
Search
21/03/2016
Propagation
A CP Tutorial: Hnich
12
ANY QUESTIONS?
Modeling
Finite-domain Variables
•To each variable x is associated a set of values called
its domain
e.g x Є {1,3,11}
•Each variable must take a value from its domain
•That domain is updated as decisions are made
•A domain may only shrink (no value is ever added)
21/03/2016
A CP Tutorial: Hnich
15
Constraint Satisfaction Problems
CSP: (X, D, C)
o X = {x1, x2,…, xn}
variables
o D = {d1, d2,…,dn}
domains (finite)
o C = {c1,c2,…,ce }
constraints
c ЄC
var(c) = {xi, xj,…, xk}
scope
rel(c) ⊆ di x dj x .. x dk permitted
tuples
Solution:
o assignment satisfying every constraint
o NP-complete task
21/03/2016
A CP Tutorial: Hnich
16
CSP: Relevance
Many problems can be represented as CSP:
Artificial Intelligence
Real-life
applications
o temporal reasoning
Control Theory
o controllers for sensory based robots
Concurency
Production planning
Staff scheduling
o process comm. and synchr.
Resource allocation
Computer Graphics
o geometric coherence
Circuit design
Database Systems
Option trading
o constraint databases
Bioinformatics
DNA sequencing
o sequence alignment
...
Operations research
o optimization
21/03/2016
A CP Tutorial: Hnich
17
Constraint Programming
CP:
provides a platform for solving CSPs
proven useful in many real applications
Platform:
set of common structures to reuse
best known algorithms for propagation & solving
Two stages:
modelling
solving
21/03/2016
A CP Tutorial: Hnich
18
Language of Constraints
The usual relational operators (<, =, >, ≤, …)
… including ≠
Linear and nonlinear constraints
Logical connectives (→, ↔, ┐, …)
Set constraints (subset, union, intersection,…)
“Global constraints”: constraints capturing a common
substructure (pattern) of combinatorial problems
21/03/2016
A CP Tutorial: Hnich
19
Map Colouring
Variables: F, N, S
Values: {
}
Constraints: N ≠ S ≠ F ≠ N
S
F
N
A solution: F
N
S
21/03/2016
A CP Tutorial: Hnich
20
Word Design Problem
This problem has its roots in Bioinformatics and Coding
Theory.
Problem: find as large a set S of strings (words) of
length 8 over the alphabet W = { A,C,G,T } with
the following properties:
1. Each word in S has 4 symbols from { C,G };
21/03/2016
A CP Tutorial: Hnich
21
Word Design Problem
Problem: find as large a set S of strings (words) of
length 8 over the alphabet W = { A,C,G,T } with
the following properties:
1. Each word in S has 4 symbols from { C,G };
2. Each pair of distinct words in S differ in at least 4
positions; and
21/03/2016
A CP Tutorial: Hnich
22
Word Design Problem
Problem: find as large a set S of strings (words) of length 8 over
the alphabet W = { A,C,G,T } with the following properties:
1. Each word in S has 4 symbols from { C,G };
2. Each pair of distinct words in S differ in at least 4
positions; and
3. Each pair of words x and y in S (where x and y may
be identical) are such that xR and yC differ in at
least 4 positions.
o
(x1,…,x8)R = ( x8,…,x1 ) is the reverse of ( x1,…,x8 )
o
(y1,…,y8)C is the Watson-Crick complement of ( y1,…,y8 ), i.e. the word where
each A is replaced by a T and vice versa and each C is replaced by a G and vice
versa.
21/03/2016
A CP Tutorial: Hnich
23
A Solution
S= { AAGCCGTT, TACGCGAT}
Each word in S has 4 symbols from { C,G };
21/03/2016
A CP Tutorial: Hnich
24
A Solution
S= { AAGCCGTT, TACGCGAT}
Each pair of distinct words in S differ
in at least 4 positions
21/03/2016
A CP Tutorial: Hnich
25
A Solution
S= { AAGCCGTT, TACGCGAT}
SR= { TTGCCGAA, TAGCGCAT}
SC= { TTCGGCAA, ATGCGCTA}
Each pair of words x and y in S
(where x and y may be identical) are such that
xR
and yC differ in at least A4CP positions
21/03/2016
Tutorial: Hnich
26
A Matrix Model
M
1
2
3
4
5
6
7
8
1
{ A,C,G,T }
{ A,C,G,T }
{ A,C,G,T }
{ A,C,G,T }
{ A,C,G,T }
{ A,C,G,T }
{ A,C,G,T }
{ A,C,G,T }
{ A,C,G,T }
{ A,C,G,T }
{ A,C,G,T }
{ A,C,G,T }
{ A,C,G,T }
{ A,C,G,T }
{ A,C,G,T }
{ A,C,G,T }
…
m
Each row represents a word in S
M[i,j]: a decision variable with domain { A,C,G,T }
21/03/2016
A CP Tutorial: Hnich
27
A Matrix Model
1. Expressing that each word in S has 4 symbols from {
C,G }
M
1
2
3
4
5
6
7
8
1
{ A,C,G,T }
{ A,C,G,T }
{ A,C,G,T }
{ A,C,G,T }
{ A,C,G,T }
{ A,C,G,T }
{ A,C,G,T }
{ A,C,G,T }
{ A,C,G,T }
{ A,C,G,T }
{ A,C,G,T }
{ A,C,G,T }
{ A,C,G,T }
{ A,C,G,T }
{ A,C,G,T }
{ A,C,G,T }
…
m
21/03/2016
A CP Tutorial: Hnich
28
A Matrix Model
M
1
2
3
4
5
6
7
8
1
{ A,C,G,T }
{ A,C,G,T }
{ A,C,G,T }
{ A,C,G,T }
{ A,C,G,T }
{ A,C,G,T }
{ A,C,G,T }
{ A,C,G,T }
{ A,C,G,T }
{ A,C,G,T }
{ A,C,G,T }
{ A,C,G,T }
{ A,C,G,T }
{ A,C,G,T }
{ A,C,G,T }
{ A,C,G,T }
…
m
For each row r
sum (p in 1..8) //channelling constraints
(M[r,p]=C or M[r,p]=G) = 4
21/03/2016
A CP Tutorial: Hnich
29
A Matrix Model
1. …
2. Each pair of distinct words in S differ in at least 4
positions
M
1
2
3
4
5
6
7
8
1
{ A,C,G,T }
{ A,C,G,T }
{ A,C,G,T }
{ A,C,G,T }
{ A,C,G,T }
{ A,C,G,T }
{ A,C,G,T }
{ A,C,G,T }
{ A,C,G,T }
{ A,C,G,T }
{ A,C,G,T }
{ A,C,G,T }
{ A,C,G,T }
{ A,C,G,T }
{ A,C,G,T }
{ A,C,G,T }
…
m
For each distinct rows r1 and r2
sum(p in 1..8) (M[r1,p] ≠ M[r2,p]) >= 4
21/03/2016
A CP Tutorial: Hnich
30
A Matrix Model
1. …
2. …
3. xR and yC differ in at least 4 positions.
MC
1
2
3
4
5
6
7
8
1
{ A,C,G,T }
{ A,C,G,T }
{ A,C,G,T }
{ A,C,G,T }
{ A,C,G,T }
{ A,C,G,T }
{ A,C,G,T }
{ A,C,G,T }
{ A,C,G,T }
{ A,C,G,T }
{ A,C,G,T }
{ A,C,G,T }
{ A,C,G,T }
{ A,C,G,T }
{ A,C,G,T }
{ A,C,G,T }
…
m
Introduce a “compliment matrix”
Each pair //channelling constraints
<M[i,j], MC[i,j]> in {<C,G>, <G,C>, <A,T>, <T,A>}
21/03/2016
A CP Tutorial: Hnich
31
A Matrix Model
1. …
2. …
3. xR and yC differ in at least 4 positions.
MC
1
2
3
4
5
6
7
8
1
{ A,C,G,T }
{ A,C,G,T }
{ A,C,G,T }
{ A,C,G,T }
{ A,C,G,T }
{ A,C,G,T }
{ A,C,G,T }
{ A,C,G,T }
{ A,C,G,T }
{ A,C,G,T }
{ A,C,G,T }
{ A,C,G,T }
{ A,C,G,T }
{ A,C,G,T }
{ A,C,G,T }
{ A,C,G,T }
…
m
For each rows r1 and r2
sum(p in 1..8) (M[r1,9-p] ≠ MC[r2,p]) >= 4
21/03/2016
A CP Tutorial: Hnich
32
ANY QUESTIONS?
Constraint Propagation
Constraint Propagation
•General principle
•Consistency
•Filtering on simple constraints
•Filtering on global constraints
•Conclusion
21/03/2016
A CP Tutorial: Hnich
35
General Principle
•Each type of constraint relies on its own specific
filtering algorithm to filter out (locally) inconsistent
variable assignment
•The communication between the different filtering
algorithms takes place through the domains of the
variables
•It makes it easy to have different types of constraints
work together
21/03/2016
A CP Tutorial: Hnich
36
General Principle
{1, 2, 3, 4, 5, 6, 7, 8}
Constraint network
≠
?
≠
?
{1, 2, 3, 4, 5, 6, 7, 8}
21/03/2016
≠
≠
≠
≠
≠
≠
1?
≠
?
A CP Tutorial: Hnich
?
≠
≠
≠
≠
8?
≠
≠
≠
?
≠
?
37
General Principle
•This propagation necessarily terminates
•The results is the same regardless of the order in
which we consider the constraints
21/03/2016
A CP Tutorial: Hnich
38
Triggering the constraints
•A constraint is woken up by one of its variables.
•domain event: anytime the domain changes
(i.e. some value has been removed)
•range event: only when the minimum or
maximum value in the domain has changed
(e.g. for x ≤ y constraint)
•value event: only when the domain is reduced to
a single value
(e.g. for x≠y constraint)
21/03/2016
A CP Tutorial: Hnich
39
Constraint Propagation
•General principle
•Consistency
•Filtering on simple constraints
•Filtering on global constraints
•Conclusion
21/03/2016
A CP Tutorial: Hnich
40
Consistency
•We reason locally about a constraint, removing
inconsistent values from domains
•We can often characterize the level of
consistency achieved by a filtering algorithm
21/03/2016
A CP Tutorial: Hnich
41
Generalized Arc Consistency
•Given a constraint C on the variables X
A support for Xi = vj on C is a partial assignment containing
Xi = vj that satisfies C.
A variable Xi is generalized arc consistent (GAC) on C iff
every value in D(Xi) has support on C.
C is GAC iff each constrained variable is GAC on C.
21/03/2016
A CP Tutorial: Hnich
42
Bounds Consistency
•Given a constraint C on the variables X
A bound support on C is a support where the interval
[min(Xi); max(Xi)] is substituted for the domain of each
constrained variable Xi.
A variable Xi is bound consistent (BC) on C if min(Xi) and
max(Xi) have bound support on C.
C is BC iff all constrained variables are BC on C.
21/03/2016
A CP Tutorial: Hnich
43
Consistency: BC example
•Consider 4x + 3y - 2z = 10
•with Dx = Dy = Dz = {0, 1, . . . , 9}
•Maintaining BC reduces domains to
Dx = {0, 1, . . . , 7},
Dy = Dz = {0, 1, . . . , 9}
•BC is triggered on range event
21/03/2016
A CP Tutorial: Hnich
44
Consistency: GAC example
•Consider 4x + 3y - 2z = 10
•with Dx = Dy = Dz = {0, 1, . . . , 9}
•Maintaining GAC reduces domains to
Dx = {0, 1, . . . , 7},
Dy = {0, 2, 4, 6, 8},
Dz = {0, 1, . . . , 9}
•GAC is triggered on domain event
21/03/2016
A CP Tutorial: Hnich
45
Constraint Propagation
•General principle
•Consistency
•Filtering on simple constraints
•Filtering on global constraints
•Conclusion
21/03/2016
A CP Tutorial: Hnich
46
Disequalities: Filtering Algorithm
•Consider x≠y with Dx = Dy = {0, 1, . . . , 9}
•Only once one of the variables is fixed may we
remove any value from the domain of the other:
Dx = {3} → Dy = {0, . . . , 2, 4, . . . , 9}
•achieves GAC
•triggered on value event
21/03/2016
A CP Tutorial: Hnich
47
Inequalities: Filtering Algorithm
•Consider x<y with Dx = Dy = {0, 1, 2, 3}
•Only once one of the variables’ bound is changed may
we remove any value from the domain of the other:
Dx = {0, 1, 2}
Dy = {1, 2, 3}
•achieves BC (which is equivalent to GAC because of
monotonicity)
•triggered on range event
21/03/2016
A CP Tutorial: Hnich
48
Constraint Propagation
•General principle
•Consistency
•Filtering on simple constraints
•Filtering on global constraints
•Conclusion
21/03/2016
A CP Tutorial: Hnich
49
Example: all-different
Var: F, N, S;
Val: {
F {
≠
Ctrs: N ≠ S ≠ F ≠ N
}
≠
N
{
};
}
≠
S
{
}
3 binary constraints,
they are GAC,
no pruning
21/03/2016
A CP Tutorial: Hnich
50
Example: all-different
Var: F, N, S;
Val: {
F {
≠
}
}
≠
Ctrs: N ≠ S ≠ F ≠ N
•Using binary disequalities,
this inconsistency goes
undetected
≠
N
{
};
S
{
}
3 binary constraints,
they are GAC,
no pruning
21/03/2016
A CP Tutorial: Hnich
51
Example: all-different
Var: F, N, S;
Val: {
F {
≠
N
{
}
≠
}
Ctrs: N ≠ S ≠ F ≠ N
We can do something simple:
≠
1. Count the number of
variables, n
{
2. Count the number of values
in the union of their domains,
m
S
3 binary constraints,
they are GAC,
no pruning
21/03/2016
};
}
3. If n > m then no solution can
possibly be found
A CP Tutorial: Hnich
52
Example: all-different
Var: F, N, S;
Val: {
F {
≠
}
}
≠
S
{
3 binary constraints,
they are GAC,
no pruning
21/03/2016
Ctrs: N ≠ S ≠ F ≠ N
We can do something simple:
1. Count the number of variables, n
2. Count the number of values in the
union of their domains, m
3. If n > m then no solution can
possibly be found
≠
N
{
};
}
• ...still fooled by
Dx = Dy = Dz = {a, b}, Dw = {c, d}
A CP Tutorial: Hnich
53
Example: all-different
Var: F, N, S;
Val: {
F {
≠
};
Ctrs: N ≠ S ≠ F ≠ N
}
F {
}
logically
equivalent
≠
all-different
N
{
}
≠
S
{
3 binary constraints,
they are GAC,
no pruning
21/03/2016
S
N
}
{
}
{
}
1 ternary constraint, not GAC,
GAC pruning empty domain
no solution!!
A CP Tutorial: Hnich
54
All-different: A Filtering Algorithm
•Build the corresponding bipartite graph
x1
1
21/03/2016
x2
2
x3
3
x4
4
x5
5
A CP Tutorial: Hnich
x6
6
7
55
All-different: A Filtering Algorithm
•Build the corresponding bipartite graph
x1
1
x2
2
x3
3
x4
4
x5
5
x6
6
7
•∃ solution iff ∃ matching covering all the
variables
21/03/2016
A CP Tutorial: Hnich
56
All-different: A Filtering Algorithm
•Build the corresponding bipartite graph
x1
1
x2
2
x3
3
x4
4
x5
5
x6
6
7
•∃ solution iff ∃ matching covering all the variables
•filtering
find alternating cycles and paths
remove inconsistent values (useless edges) [X4=2]
fix variables (vital edges) [X4=4]
21/03/2016
A CP Tutorial: Hnich
57
All-different: A Filtering Algorithm
•Build the corresponding bipartite graph
x1
1
x2
2
x3
3
x4
4
x5
5
x6
6
7
•∃ solution iff ∃ matching covering all the
variables
•starting from the current matching at each call
makes the algorithm incremental
•achieves GAC
21/03/2016
A CP Tutorial: Hnich
58
Cardinality: A Filtering Algorithm
•distribute([c1, . . . , cm],[v1, . . . , vm],[x1, . . . ,xn]),
ci ∈ [li, ui]
21/03/2016
A CP Tutorial: Hnich
59
Cardinality: A Filtering Algorithm
•distribute([c1, . . . , cm],[v1, . . . , vm],[x1, . . . ,xn]),
ci ∈ [li, ui]
•transformed into a network flow problem
•∃ solution iff ∃ feasible flow
[0,1]
v1
[l1,u1]
x1
[1,1]
S
v2
T
xi
vj
[lm,um]
xn
vm
21/03/2016
A CP Tutorial: Hnich
60
Cardinality: A Filtering Algorithm
•Compute a maximum flow
•Build the residual graph
•Find its strongly connected components
•Remove zero-flow arcs between components
•achieves GAC
21/03/2016
A CP Tutorial: Hnich
61
Lexicographic Ordering: A Filtering Algorithm
• A new family of global constraints
• Linear time complexity
• Ensures that a pair of vectors of variables are
lexicographically ordered.
0
1
4
2
8
7
2
21/03/2016
lex
9
A CP Tutorial: Hnich
62
Motivation: Symmetry
Symmetry: transformation of an entity that
preserves the properties of the entity
Example:
180º
21/03/2016
A CP Tutorial: Hnich
63
Motivation: Symmetry
• Frequently occurs
Combinatorial problems like
covering arrays
o Rows and columns can be permuted
Messy real world problems
like nurse rostering
o Nurses with same skills can be
swapped
• Tough for IP
Very active research area
within CP
Some effective techniques
have been developed
21/03/2016
A CP Tutorial: Hnich
64
Motivation
• An important class of symmetries in CP
matrices of decision variables
rows/columns represent indistinguishable
objects, hence symmetric
• Rows and columns can be permuted without
affecting satisfiability
• Encountered frequently
21/03/2016
A CP Tutorial: Hnich
65
Example: Sports Scheduling
•
•
•
•
Schedule games between n teams over n-1 weeks
Each week is divided into n/2 periods
Each period has 2 slots: home and away
Find a schedule such that
every team plays exactly once a week
every team plays against every other team
every team plays at most twice in the same period over the
tournament
21/03/2016
A CP Tutorial: Hnich
66
Example: Sport Scheduling
• We need a table of meetings!
Week1
Week 2
Week 3
Week 4
Week 5
Week 6
Week 7
Period1
0 vs 1
0 vs 2
4 vs 7
3 vs 6
3 vs 7
1 vs 5
2 vs 4
Period2
2 vs 3
1 vs 7
0 vs 3
5 vs 7
1 vs 4
0 vs 6
5 vs 6
Period3
4 vs 5
3 vs 5
1 vs 6
0 vs 4
2 vs 6
2 vs 7
0 vs 7
Period4
6 vs 7
4 vs 6
2 vs 5
1 vs 2
0 vs 5
3 vs 4
1 vs 3
21/03/2016
A CP Tutorial: Hnich
67
Example: Sport Scheduling
• We need a table of meetings!
Week1
Week 2
Week 3
Week 4
Week 5
Week 6
Week 7
Period1
0 vs 1
0 vs 2
4 vs 7
3 vs 6
3 vs 7
1 vs 5
2 vs 4
Period2
2 vs 3
1 vs 7
0 vs 3
5 vs 7
1 vs 4
0 vs 6
5 vs 6
Period3
4 vs 5
3 vs 5
1 vs 6
0 vs 4
2 vs 6
2 vs 7
0 vs 7
Period4
6 vs 7
4 vs 6
2 vs 5
1 vs 2
0 vs 5
3 vs 4
1 vs 3
• Weeks are indistinguishable
• Periods are indistinguishable
21/03/2016
A CP Tutorial: Hnich
68
Example: Sport Scheduling
• Weeks are indistinguishable
• Periods are indistinguishable
Week 1
Week 2
Week 3
Week 4
Week 5
Week 6
Week 7
Period 1
0 vs 1
0 vs 2
4 vs 7
3 vs 6
3 vs 7
1 vs 5
2 vs 4
Period 2
2 vs 3
1 vs 7
0 vs 3
5 vs 7
1 vs 4
0 vs 6
5 vs 6
Period 3
4 vs 5
3 vs 5
1 vs 6
0 vs 4
2 vs 6
2 vs 7
0 vs 7
Period 4
6 vs 7
4 vs 6
2 vs 5
1 vs 2
0 vs 5
3 vs 4
1 vs 3
21/03/2016
A CP Tutorial: Hnich
69
Example: Sport Scheduling
• Weeks are indistinguishable
• Periods are indistinguishable
Week 1
Week 2
Week 3
Week 4
Week 5
Week 6
Week 7
Period 1
0 vs 1
3 vs 7
4 vs 7
3 vs 6
0 vs 2
1 vs 5
2 vs 4
Period 2
2 vs 3
1 vs 4
0 vs 3
5 vs 7
1 vs 7
0 vs 6
5 vs 6
Period 3
4 vs 5
2 vs 6
1 vs 6
0 vs 4
3 vs 5
2 vs 7
0 vs 7
Period 4
6 vs 7
0 vs 5
2 vs 5
1 vs 2
4 vs 6
3 vs 4
1 vs 3
21/03/2016
A CP Tutorial: Hnich
70
Example: Bin Packing
• Consider 2 identical bins:
A
21/03/2016
B
A CP Tutorial: Hnich
71
Example
• Consider 2 identical bins:
A
B
• We must pack 6 items:
21/03/2016
A CP Tutorial: Hnich
1
2
3
4
5
6
72
Example
• Here is one solution:
21/03/2016
5
6
3
4
1
2
A
B
A CP Tutorial: Hnich
73
Example
• Here is another:
21/03/2016
6
5
4
3
2
1
A
B
A CP Tutorial: Hnich
74
Example
• Is there any fundamental difference?
a)
b)
21/03/2016
5
3
1
A
6
4
2
B
6
4
2
A
5
3
1
B
A CP Tutorial: Hnich
75
Example
• Consider a matrix model:
a)
b)
21/03/2016
5
3
1
A
6
4
2
A
1 2 3 4 5 6
6
4
2
B
5
3
1
B
A 1 0 1 0 1 0
B 0 1 0 1 0 1
1 2 3 4 5 6
A 0 1 0 1 0 1
A CP Tutorial: Hnich
B 1 0 1 0 1 0
76
Example
• Consider a matrix model:
a)
b)
21/03/2016
5
3
1
A
6
4
2
A
6
4
2
B
5
3
1
B
NB: ‘1’ means place
this item in this bin:
1 2 3 4 5 6
A 1 0 1 0 1 0
B 0 1 0 1 0 1
1 2 3 4 5 6
A 0 1 0 1 0 1
B 1 0 1 0 1 0
A CP Tutorial: Hnich
77
Example
• Consider a matrix model:
If we insist that row A lex row B,
we remove a) from the solution set.
1 2 3 4 5 6
A 1 0 1 0 1 0
B 0 1 0 1 0 1
b)
21/03/2016
6
4
2
A
5
3
1
B
1 2 3 4 5 6
A 0 1 0 1 0 1
A CP Tutorial: Hnich
B 1 0 1 0 1 0
78
Example
• Notice that items 3 and 4 are identical.
b)
c)
21/03/2016
6
4
2
A
6
3
2
1 2 3 4 5 6
5
3
1
B
A 0 1 0 1 0 1
B 1 0 1 0 1 0
1 2 3 4 5 6
5
4
1
A 0 1 1 0 0 1
A CP Tutorial: Hnich
B 1 0 0 1 1 0
79
Example
• Notice that items 3 and 4 are identical.
b)
6
4
2
A
1 2 3 4 5 6
5
3
1
B
A 0 1 0 1 0 1
B 1 0 1 0 1 0
If we insist that col 3 lex col 4,
we remove c) from the solution set.
21/03/2016
A CP Tutorial: Hnich
1 2 3 4 5 6
A 0 1 1 0 0 1
B 1 0 0 1 1 0
80
Aims
• Main Goal
Eliminate row and column symmetries effectively and efficiently.
• Aims:
Investigate types of ordering constraints to break row and column
symmetries.
Devise global constraints to easily pose and efficiently solve the ordering
constraints.
Examine the effectiveness of the ordering constraint
we focus on lexicographic ordering constraints
21/03/2016
A CP Tutorial: Hnich
81
How GACLex Works
• Consider the following example.
• We have two vectors of decision variables:
x {2}
{1,3,4} {1,2,3,4,5}
y {0,1,2} {1}
21/03/2016
{0,1,2,3,4}
A CP Tutorial: Hnich
{1,2} {3,4,5}
{0,1} {0,1,2}
82
How GACLex Works
• Consider the following example.
• We have two vectors of decision variables:
x {2}
{1,3,4} {1,2,3,4,5}
y {0,1,2} {1}
{0,1,2,3,4}
{1,2} {3,4,5}
{0,1} {0,1,2}
• We want to enforce GAC on: x lex y.
21/03/2016
A CP Tutorial: Hnich
83
A Tale of Two Pointers
• We use two pointers, α and β, to avoid
repeatedly traversing the vectors.
21/03/2016
A CP Tutorial: Hnich
84
A Tale of Two Pointers
• We use two pointers, α and β, to avoid
repeatedly traversing the vectors.
• We index the vectors as follows:
0
1
2
3
4
x {2}
{1,3,4}
{1,2,3,4,5}
{1,2}
{3,4,5}
y {0,1,2}
{1}
{0,1,2,3,4}
{0,1}
{0,1,2}
Most Significant Index
21/03/2016
A CP Tutorial: Hnich
85
A Tale of Two Pointers
• We use two pointers, α and β, to avoid repeatedly
traversing the vectors.
0
1
2
3
4
x {2}
{1,3,4}
{1,2,3,4,5}
{1,2}
{3,4,5}
y {0,1,2}
{1}
{0,1,2,3,4}
{0,1}
{0,1,2}
• α: index such that all variables at more significant
indices are ground and equal.
21/03/2016
A CP Tutorial: Hnich
86
A Tale of Two Pointers
• We use two pointers, α and β, to avoid
repeatedly traversing the vectors.
0
•
•
1
2
3
4
x {2}
{1,3,4}
{1,2,3,4,5}
{1,2}
{3,4,5}
y {0,1,2}
{1}
{0,1,2,3,4}
{0,1}
{0,1,2}
α: index such that all variables at more significant indices are ground and equal.
β: most significant index from which the two vectors’ tails necessarily violate the
constraint.
21/03/2016
A CP Tutorial: Hnich
87
A Tale of Two Pointers
• We use two pointers, α and β, to avoid repeatedly
traversing the vectors.
0
1
2
3
4
x {2}
{1,3,4}
{1,2,3,4,5}
{1,2}
{3,4,5}
y {0,1,2}
{1}
{0,1,2,3,4}
{0,1}
{0,1,2}
•
α: index such that all variables at more significant indices are
ground and equal.
• β: If tails never violate the constraint:
21/03/2016
A CP Tutorial: Hnich
88
Pointer Initialisation
• Needs one traversal of the vectors (linear).
0
1
2
3
4
x {2}
{1,3,4}
{1,2,3,4,5}
{1,2}
{3,4,5}
y {0,1,2}
{1}
{0,1,2,3,4}
{0,1}
{0,1,2}
α
•
•
α: index such that all variables at more significant indices are ground and equal.
β: most significant index from which the two vectors’ tails necessarily violate the
constraint.
21/03/2016
A CP Tutorial: Hnich
89
Pointer Initialisation
• Needs one traversal of the vectors (linear).
0
1
2
•
4
x {2}
{1,3,4}
{1,2,3,4,5}
{1,2}
{3,4,5}
y {0,1,2}
{1}
{0,1,2,3,4}
{0,1}
{0,1,2}
α
•
3
β
α: index such that all variables at more significant indices are ground and equal.
β: most significant index from which the two vectors’ tails necessarily violate the
constraint.
21/03/2016
A CP Tutorial: Hnich
90
Failure
• Inconsistent if β α.
•
•
α: index such that all variables at more significant indices are ground and equal.
β: most significant index from which the two vectors’ tails necessarily violate the
constraint.
21/03/2016
A CP Tutorial: Hnich
91
How GACLex Works
• We maintain α and β as assignments made.
•
•
α: index such that all variables at more significant indices are ground and equal.
β: most significant index from which the two vectors’ tails necessarily violate the
constraint.
21/03/2016
A CP Tutorial: Hnich
92
How GACLex Works
• We maintain α and β as assignments made.
• When β = α + 1 we enforce bounds consistency
on: xα < yα
•
•
α: index such that all variables at more significant indices are ground and equal.
β: most significant index from which the two vectors’ tails necessarily violate the
constraint.
21/03/2016
A CP Tutorial: Hnich
93
How GACLex Works
• We maintain α and β as assignments made.
• When β = α + 1 we enforce bounds consistency
on: xα < yα
The variable at the αth element of each vector.
•
•
α: index such that all variables at more significant indices are ground and equal.
β: most significant index from which the two vectors’ tails necessarily violate the
constraint.
21/03/2016
A CP Tutorial: Hnich
94
How GACLex Works
• We maintain α and β as assignments made.
• When β = α + 1 we enforce bounds consistency
on: xα < yα
• When β > α + 1 we enforce bounds consistency
on: xα yα
•
•
α: index such that all variables at more significant indices are ground and equal.
β: most significant index from which the two vectors’ tails necessarily violate the
constraint.
21/03/2016
A CP Tutorial: Hnich
95
How GACLex Works
• We maintain α and β as assignments made.
• Key: we reduce GAC on vectors to BC on
binary constraints.
•
•
α: index such that all variables at more significant indices are ground and equal.
β: most significant index from which the two vectors’ tails necessarily violate the
constraint.
21/03/2016
A CP Tutorial: Hnich
96
How GACLex Works
• 0, 1 removed from yα.
0
1
2
•
4
x {2}
{1,3,4}
{1,2,3,4,5}
{1,2}
{3,4,5}
y {0,1,2}
{1}
{0,1,2,3,4}
{0,1}
{0,1,2}
α
•
3
β
α: index such that all variables at more significant indices are ground and equal.
β: most significant index from which the two vectors’ tails necessarily violate the
constraint.
21/03/2016
A CP Tutorial: Hnich
97
How GACLex Works
• 0, 1 removed from yα.
0
1
2
•
4
x {2}
{1,3,4}
{1,2,3,4,5}
{1,2}
{3,4,5}
y {0,1,2}
{1}
{0,1,2,3,4}
{0,1}
{0,1,2}
α
•
3
β
α: index such that all variables at more significant indices are ground and equal.
β: most significant index from which the two vectors’ tails necessarily violate the
constraint.
21/03/2016
A CP Tutorial: Hnich
98
How GACLex Works
• Update α.
0
1
2
•
4
x {2}
{1,3,4}
{1,2,3,4,5}
{1,2}
{3,4,5}
y {0,1,2}
{1}
{0,1,2,3,4}
{0,1}
{0,1,2}
α
•
3
β
α: index such that all variables at more significant indices are ground and equal.
β: most significant index from which the two vectors’ tails necessarily violate the
constraint.
21/03/2016
A CP Tutorial: Hnich
99
How GACLex Works
• Update α.
0
1
2
•
4
x {2}
{1,3,4}
{1,2,3,4,5}
{1,2}
{3,4,5}
y {0,1,2}
{1}
{0,1,2,3,4}
{0,1}
{0,1,2}
α
•
3
β
α: index such that all variables at more significant indices are ground and equal.
β: most significant index from which the two vectors’ tails necessarily violate the
constraint.
21/03/2016
A CP Tutorial: Hnich
100
How GACLex Works
• 3, 4 removed from xα.
0
x {2}
1
{1,3,4}
y {0,1,2} {1}
2
•
4
{1,2,3,4,5}
{1,2} {3,4,5}
{0,1,2,3,4}
{0,1} {0,1,2}
α
•
3
β
α: index such that all variables at more significant indices are ground and equal.
β: most significant index from which the two vectors’ tails necessarily violate the
constraint.
21/03/2016
A CP Tutorial: Hnich
101
How GACLex Works
• 3, 4 removed from xα.
0
x {2}
1
{1,3,4}
y {0,1,2} {1}
2
•
4
{1,2,3,4,5}
{1,2} {3,4,5}
{0,1,2,3,4}
{0,1} {0,1,2}
α
•
3
β
α: index such that all variables at more significant indices are ground and equal.
β: most significant index from which the two vectors’ tails necessarily violate the
constraint.
21/03/2016
A CP Tutorial: Hnich
102
How GACLex Works
• Update α.
0
x {2}
1
{1,3,4}
y {0,1,2} {1}
2
•
4
{1,2,3,4,5}
{1,2} {3,4,5}
{0,1,2,3,4}
{0,1} {0,1,2}
α
•
3
β
α: index such that all variables at more significant indices are ground and equal.
β: most significant index from which the two vectors’ tails necessarily violate the
constraint.
21/03/2016
A CP Tutorial: Hnich
103
How GACLex Works
• Update α.
0
x {2}
1
{1,3,4}
y {0,1,2} {1}
2
•
4
{1,2,3,4,5}
{1,2} {3,4,5}
{0,1,2,3,4}
{0,1} {0,1,2}
α
•
3
β
α: index such that all variables at more significant indices are ground and equal.
β: most significant index from which the two vectors’ tails necessarily violate the
constraint.
21/03/2016
A CP Tutorial: Hnich
104
How GACLex Works
• 4, 5 removed from xα, 0, 1 removed from yα.
0
x {2}
1
{1,3,4}
y {0,1,2} {1}
2
•
4
{1,2,3,4,5}
{1,2} {3,4,5}
{0,1,2,3,4}
{0,1} {0,1,2}
α
•
3
β
α: index such that all variables at more significant indices are ground and equal.
β: most significant index from which the two vectors’ tails necessarily violate the
constraint.
21/03/2016
A CP Tutorial: Hnich
105
How GACLex Works
• 4, 5 removed from xα, 0, 1 removed from yα.
0
x {2}
1
{1,3,4}
y {0,1,2} {1}
2
•
4
{1,2,3,4,5}
{1,2} {3,4,5}
{0,1,2,3,4}
{0,1} {0,1,2}
α
•
3
β
α: index such that all variables at more significant indices are ground and equal.
β: most significant index from which the two vectors’ tails necessarily violate the
constraint.
21/03/2016
A CP Tutorial: Hnich
106
Complexity
• Initialisation: O(n)
• Propagation:
• We enforce bounds consistency between at most n pairs of
variables: xα < yα or xα yα.
• Cost: b.
• Overall cost: O(nb).
• Amortised cost: O(b)
21/03/2016
A CP Tutorial: Hnich
107
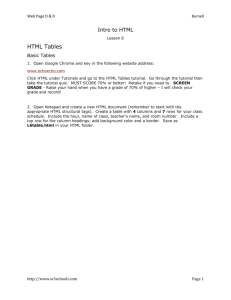
Results: BIBD
Time(s)
10000
Decomposition takes
About 9 times
longer on each of
these instances.
Decomposition
1000
100
10
1
1
21/03/2016
10
100
GACLex
1000
A CP Tutorial: Hnich
10000
108
Constraint Propagation
•General principle
•Consistency
•Filtering on simple constraints
•Filtering on global constraints
•Conclusion
21/03/2016
A CP Tutorial: Hnich
109
Conclusion
•Constraint propagation is the glue to combine efficient
filtering algorithms for common substructures
Matching theory, network flow theory, automata theory,
computational geometry, …, encapsulated in constraints
•Characterization of level of consistency
•Aim for incrementality
•Amount/frequency of filtering vs processing time
21/03/2016
A CP Tutorial: Hnich
110
ANY QUESTIONS?
Search
Search
•General principle
•Variable selection heuristics
•Value selection heuristics
•Conclusion
21/03/2016
A CP Tutorial: Hnich
113
General principle
…
var int Solution[Nodes] in Values;
solve{
forall(e in Edges)
abs(Solution[e.x] - Solution[e.y]) >1;
alldifferent(Solution);
};
21/03/2016
A CP Tutorial: Hnich
114
General principle
…
var int Solution[Nodes] in Values;
solve{
…
};
search {
…
}
21/03/2016
A CP Tutorial: Hnich
115
General principle
…
var int Solution[Nodes] in Values;
solve{
forall(e in Edges)
abs(Solution[e.x] - Solution[e.y]) >1;
alldifferent(Solution);
};
search {
…
}
21/03/2016
With a good search strategy
We can quickly find good solution
A CP Tutorial: Hnich
116
Searching for a good solution
•For any interesting problem, propagation alone
is not enough
•We typically proceed by tree search
21/03/2016
A CP Tutorial: Hnich
117
Solving CSP by Search
Search tree:
root: empty node
one variable per level
sucessors of a node: every value of the next level var
F
N
S
21/03/2016
A CP Tutorial: Hnich
118
Searching for a good solution
•Two main decisions to control search
choose a variable
choose a value from its domain
21/03/2016
A CP Tutorial: Hnich
119
Search
•General principle
•Variable selection heuristics
•Value selection heuristics
•Conclusion
21/03/2016
A CP Tutorial: Hnich
120
Variable Selection Heuristics
•Has an impact on tree topology
•static vs dynamic ordering
•smallest-domain-first
first-fail principle: “To succeed, try first where you
are most likely to fail.”
•regret: favour variable with greatest difference
in cost between two best values in domain
21/03/2016
A CP Tutorial: Hnich
121
Search
•General principle
•Variable selection heuristics
•Value selection heuristics
•Conclusion
21/03/2016
A CP Tutorial: Hnich
122
Value Selection Heuristics
•Not as critical
•Very problem-dependent
•Alternative for large domains: domain splitting
21/03/2016
A CP Tutorial: Hnich
123
Search
•General principle
•Variable selection heuristics
•Value selection heuristics
•Conclusion
21/03/2016
A CP Tutorial: Hnich
124
Conclusion
•A lot of control over the search strategy
•Many heuristics developed, some of them
generic
21/03/2016
A CP Tutorial: Hnich
125
ANY QUESTIONS?
Lot-sizing under demand uncertainty
Demand Uncertainty in Supply Chain Networks
Inventories
Production
21/03/2016
A CP Tutorial: Hnich
Sales
128
Demand Uncertainty in Supply Chain Networks
?
When to order?
How much to order?
Inventories
Production
21/03/2016
A CP Tutorial: Hnich
Sales
129
Demand Uncertainty in Supply Chain Networks
?
When to order?
How much to order?
Inventories
Production
Demand
Uncertainty
21/03/2016
A CP Tutorial: Hnich
Sales
130
Demand Uncertainty in Supply Chain Networks
?
When to order?
How much to order?
Inventories
Production
Demand
work in collaboration
Uncertainty
with Bell Labs Ireland
Sales
21/03/2016
A CP Tutorial: Hnich
131
Demand Uncertainty in Supply Chain Networks
Determining the optimal inventory control policy
parameters is key to profitability for any company
involved in distribution and/or production of goods
We developed a CP model to find the optimal dynamic
(R,S) inventory policy parameters such that
• the expected cost is minimized;
• demand is stochastic, non-stationary; and
• a minimum service level is required
21/03/2016
A CP Tutorial: Hnich
132
Results
• State-of-the-art improvement for the stochastic
non-stationary formulation of the lot-sizing
problem
• Real-world instances can be solved in few
seconds
• The strategy could be extended to deal with
Capacity constraints
Lead time uncertainty
21/03/2016
A CP Tutorial: Hnich
133
(Demo)
21/03/2016
A CP Tutorial: Hnich
134
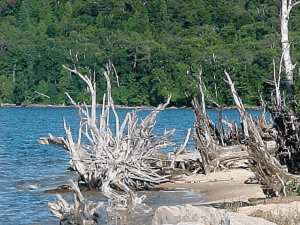
Experimental results
Seasonal Demands
100000
10000
seconds
1000
100
ILOG - CP model
10
CPLEX - MIP model
Choco - CP model dyn red
1
0.1
24 26 28 30 32 34 36 38 40 42 44 46 48 50
0.01
0.001
periods
21/03/2016
A CP Tutorial: Hnich
135
ANY QUESTIONS?
Successful CP
•(Machine) Scheduling
(whole book on constraint-based scheduling)
•Sports Scheduling (e.g. NFL)
•Rostering
•Allocation (e.g. terminal gates to aircrafts)
•Transportation (e.g. VRP, airline crew rotation)
•Even pure problems like Maximum Clique
•Production planning (Lot-sizing)
21/03/2016
A CP Tutorial: Hnich
137
Finding out more
•Talks: CP, CPAIOR, IJCAI, AAAI, ECAI,
INFORMS, CORS
•Papers: Lecture Notes in Computer Science
(Springer), Constraints (Kluwer), AI journals,
OR journals
•Software: CHIP; ECLiPSe; ECLAIR; FaCiLe;
ILOG OPL, Solver; SISCtus Prolog, Choco,. . .
21/03/2016
A CP Tutorial: Hnich
138
Finding out more
Books:
•Apt, K., Principles of Constraint Programming, Cambridge University Press,
2003.
•Baptiste, P., Le Pape, C., Nuijten, W.. Constraint-Based Scheduling, Kluwer
Academic Publishers,2001.
•Hooker, J., Logic-Based Methods for Optimization: Combining Optimization
and Constraint Satisfaction, John Wiley & Sons, 2000.
•Marriott, K., Stuckey, P.J., Programming with Constraints: An Introduction,
MIT Press, 1998.
•Constraint and Integer Programming: Toward a Unified Methodology, edited
by M. Milano, Kluwer Academic Publishers, 2003.
•Tsang, E., Foundations of Constraint Satisfaction, Academic Press, 1993.
•Van Hentenryck, P., The OPL Optimization Programming Language, MIT
Press, 1999.
21/03/2016
A CP Tutorial: Hnich
139
Acknowledgements
•Some parts of this tutorial are adapted material from
tutorials given by:
Gilles Pesant
Pedro Messeguer
Chris Beck
•Most parts of the tutorial is work done in collaboration
with:
Alan Frisch, Ian miguel, Zeynep Kiziltan, Toby Walsh,
Armagan Tarim, Roberto Rossi, Steven Prestwich
21/03/2016
A CP Tutorial: Hnich
140