Max Flow slides
advertisement

Maximum Flow
Some of these slides are adapted from Introduction
and Algorithms by Kleinberg and Tardos.
Princeton University • COS 423 • Theory of Algorithms • Spring 2001 • Kevin Wayne
Contents
Contents.
Maximum flow problem.
Minimum cut problem.
Max-flow min-cut theorem.
Augmenting path algorithm.
Capacity-scaling.
Shortest augmenting path.
2
Maximum Flow and Minimum Cut
Max flow and min cut.
Two very rich algorithmic problems.
Cornerstone problem in combinatorial optimization.
Beautiful mathematical duality.
Nontrivial applications / reductions.
Network connectivity.
Bipartite matching.
Data mining.
Open-pit mining.
Airline scheduling.
Image processing.
Project selection.
Baseball elimination.
Network reliability.
Security of statistical data.
Distributed computing.
Egalitarian stable matching.
Distributed computing.
Many many more . . .
3
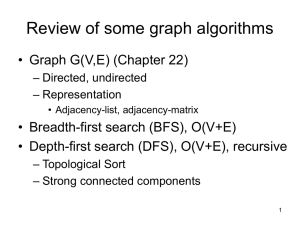
Max Flow Network
Max flow network: G = (V, E, s, t, u) .
(V, E) = directed graph, no parallel arcs.
Two distinguished nodes: s = source, t = sink.
u(e) = capacity of arc e.
10
s
Capacity
5
15
2
9
5
4
15
15
10
3
8
6
10
4
6
15
10
4
30
7
t
4
Flows
An s-t flow is a function f: E that satisfies:
For each e E:
0 f(e) u(e)
(capacity)
f (e )
For each v V – {s, t}:
e in to v
f (e ) :
e in to v
4
10
s
Capacity
Flow
0
5
15
0
(conservation)
e out of v
f (e ) :
f (w, v )
w : ( w ,v ) E
e out of v
2
0
9
4 4
0
15
3
4
8
4 0
0
6
4
f (e )
30
0
f (v , w )
w : ( v ,w ) E
5
15 0
0
10
6
4
10
15 0
0
10
t
7
5
Flows
An s-t flow is a function f: E that satisfies:
For each e E:
0 f(e) u(e)
(capacity)
For each v V – {s, t}:
f (e )
e in to v
f (e )
(conservation)
e out of v
MAX FLOW: find s-t flow that maximizes net flow out of the source.
f
4
10
s
Capacity
Flow
0
5
15
0
2
0
9
4 4
0
15
3
4
8
4 0
0
6
f (e )
e out of s
5
15 0
0
10
6
4
10
15 0
0
10
t
Value = 4
4
30
0
7
6
Flows
An s-t flow is a function f: E that satisfies:
For each e E:
0 f(e) u(e)
(capacity)
For each v V – {s, t}:
f (e )
e in to v
f (e )
(conservation)
e out of v
MAX FLOW: find s-t flow that maximizes net flow out of the source.
10
10
s
Capacity
Flow
3
5
15
11
2
6
9
4 4
0
15
3
8
8
4 0
1
6
5
15 0
6
10
6
8
10
15 0
10
10
t
Value = 24
4
30
11
7
7
Flows
An s-t flow is a function f: E that satisfies:
For each e E:
0 f(e) u(e)
(capacity)
For each v V – {s, t}:
f (e )
e in to v
f (e )
(conservation)
e out of v
MAX FLOW: find s-t flow that maximizes net flow out of the source.
10
10
s
Capacity
Flow
4
5
15
14
2
9
9
4 0
1
15
3
8
8
4 0
4
6
5
15 0
9
10
6
9
10
15 0
10
10
t
Value = 28
4
30
14
7
8
Networks
Network
Nodes
Arcs
Flow
telephone exchanges, cables, fiber optics,
computers, satellites microwave relays
voice, video,
packets
gates, registers,
processors
wires
current
joints
rods, beams, springs
heat, energy
hydraulic
reservoirs, pumping
stations, lakes
pipelines
fluid, oil
financial
stocks, currency
transactions
money
airports, rail yards,
street intersections
highways, railbeds,
airway routes
freight,
vehicles,
passengers
sites
bonds
energy
communication
circuits
mechanical
transportation
chemical
9
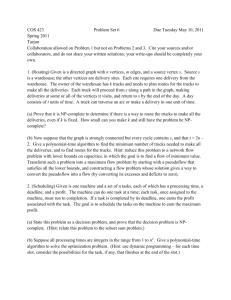
Cuts
An s-t cut is a node partition (S, T) such that s S, t T.
The capacity of an s-t cut (S, T) is:
u(e ) :
u(v , w ).
e out of S
(v ,w ) E
v S, w T
Min s-t cut: find an s-t cut of minimum capacity.
10
s
5
15
2
9
5
4
15
15
10
3
8
6
10
4
6
15
10
t
Capacity = 30
4
30
7
10
Cuts
An s-t cut is a node partition (S, T) such that s S, t T.
The capacity of an s-t cut (S, T) is:
u(e ) :
u(v , w ).
e out of S
(v ,w ) E
v S, w T
Min s-t cut: find an s-t cut of minimum capacity.
10
s
5
15
2
9
5
4
15
15
10
3
8
6
10
4
6
15
10
t
Capacity = 62
4
30
7
11
Cuts
An s-t cut is a node partition (S, T) such that s S, t T.
The capacity of an s-t cut (S, T) is:
u(e ) :
u(v , w ).
e out of S
(v ,w ) E
v S, w T
Min s-t cut: find an s-t cut of minimum capacity.
10
s
5
15
2
9
5
4
15
15
10
3
8
6
10
4
6
15
10
t
Capacity = 28
4
30
7
12
Flows and Cuts
L1. Let f be a flow, and let (S, T) be a cut. Then, the net flow sent
across the cut is equal to the amount reaching t.
f (e ) f (e )
e out of S
10
10
s
4
5
15
10
Value = 24
e in to S
f
e out of s
2
6
9
4 4
0
15
3
8
8
4 0
0
6
4
f (e )
30
10
5
15 0
6
10
6
8
10
15 0
10
10
t
7
13
Flows and Cuts
L1. Let f be a flow, and let (S, T) be a cut. Then, the net flow sent
across the cut is equal to the amount reaching t.
f (e ) f (e )
e out of S
10
10
s
4
5
15
10
Value = 24
e in to S
f
e out of s
2
6
9
4 4
0
15
3
8
8
4 0
0
6
4
f (e )
30
10
5
15 0
6
10
6
8
10
15 0
10
10
t
7
14
Flows and Cuts
L1. Let f be a flow, and let (S, T) be a cut. Then, the net flow sent
across the cut is equal to the amount reaching t.
f (e ) f (e )
e out of S
10
10
s
4
5
15
10
Value = 24
e in to S
f
e out of s
2
6
9
4 4
0
15
3
8
8
4 0
0
6
4
f (e )
30
10
5
15 0
6
10
6
8
10
15 0
10
10
t
7
15
Flows and Cuts
f (e ) f (e ) f .
Let f be a flow, and let (S, T) be a cut. Then,
e out of S
e in to S
Proof by induction on |S|.
Base case: S = { s }.
Inductive hypothesis: assume true for |S| < k.
–
consider cut (S, T) with |S| = k
– S = S' { v } for some v s, t, |S' | = k-1
– adding v to S' increase cut capacity by
cap(S', T') = | f |.
f (e ) f (e ) 0
e out of v
e in to v
t
t
v
v
s
s
S'
Before
S
After
16
Flows and Cuts
L2. Let f be a flow, and let (S, T) be a cut. Then, | f | cap(S, T).
Proof.
f
f (e ) f (e )
e out of S
e in to S
f (e )
e out of S
S
u (e )
e out of S
4
8
T
cap(S, T)
s
t
7
6
Corollary. Let f be a flow, and let (S, T) be a cut. If |f| = cap(S, T), then
f is a max flow and (S, T) is a min cut.
17
Max Flow and Min Cut
Corollary. Let f be a flow, and let (S, T) be a cut. If |f| = cap(S, T), then
f is a max flow and (S, T) is a min cut.
10
10
s
4
5
15
15
2
9
9
4 0
1
15
3
8
8
4 0
4
6
4
Cut capacity = 28
30
15
5
15 0
9
10
6
9
10
15 0
10
10
t
7
Flow value = 28
18
Max-Flow Min-Cut Theorem
MAX-FLOW MIN-CUT THEOREM (Ford-Fulkerson, 1956): In any
network, the value of the max flow is equal to the value of the min cut.
"Good characterization."
Proof IOU.
10
10
s
4
5
15
15
2
9
9
4 0
1
15
3
8
8
4 0
4
6
4
Cut capacity = 28
30
15
5
15 0
9
10
6
9
10
15 0
10
10
t
7
Flow value = 28
19
Towards an Algorithm
Find an s-t path where each arc has u(e) > f(e) and "augment" flow
along the path.
4
0
4
s
0
10
0
4
2
5
0
4
0
4
0
13
3
0
10
t
Flow value = 0
20
Towards an Algorithm
Find an s-t path where each arc has u(e) > f(e) and "augment" flow
along the path.
Repeat until you get stuck.
4
0
4
s
X
0 10
10
0
4
2
5
0
4
0
4
X
0 10
13
3
X
0 10
10
t
Flow value = 10
21
Towards an Algorithm
Find an s-t path where each arc has u(e) > f(e) and "augment" flow
along the path.
Repeat until you get stuck.
Greedy algorithm fails.
Flow value = 10
4
0
4
s
10
10
2
4
5
s
10
10
0
4
0
4
4
0
4
10
13
3
5
4
5
4
5
2
5
10
10
t
Flow value = 14
4
5
6
13
3
10
10
t
22
Residual Arcs
Original graph G = (V, E).
Flow f(e).
Arc e = (v, w) E.
Capacity
v
17
w
6
Flow
Residual graph: Gf = (V, Ef ).
Residual arcs e = (v, w) and eR = (w, v).
"Undo" flow sent.
Residual capacity
v
11
w
6
Residual capacity
23
Residual Graph and Augmenting Paths
Residual graph: Gf = (V, Ef ).
Ef = {e : f(e) < u(e)} {eR : f(e) > 0}.
4
0
4
G
s
10
10
5
0
4
0
4
2
u (e ) f (e ) if e E
uf (e )
if e R E
f(e)
0
4
10
13
4
3
10
10
t
5
4
4
Gf
4
4
s
10
2
10
3
3
10
t
24
Augmenting Path
Augmenting path = path in residual graph.
4
4 0
X
4
G
s
10
10
5
4 X
0
4
4 X
0
4
2
0 4
X
4
10
X 6
13
4
3
10
10
t
5
4
4
Gf
4
4
s
10
2
10
3
3
10
t
25
Augmenting Path
Augmenting path = path in residual graph.
Max flow no augmenting paths ???
4
4
4
G
s
10
10
5
4
4
4
4
2
4
4
6
13
4
3
5
10
10
t
Flow value = 14
4
4
Gf
4
4
s
10
2
6
7
3
10
t
26
Max-Flow Min-Cut Theorem
Augmenting path theorem (Ford-Fulkerson, 1956): A flow f is a max
flow if and only if there are no augmenting paths.
MAX-FLOW MIN-CUT THEOREM (Ford-Fulkerson, 1956): the value of
the max flow is equal to the value of the min cut.
We prove both simultaneously by showing the TFAE:
(i) f is a max flow.
(ii)
There is no augmenting path relative to f.
(iii)
There exists a cut (S, T) such that |f| = cap(S, T).
27
Proof of Max-Flow Min-Cut Theorem
We prove both simultaneously by showing the TFAE:
(i) f is a max flow.
(ii)
There is no augmenting path relative to f.
(iii)
There exists a cut (S, T) such that |f| = cap(S, T).
(i) (ii)
We show contrapositive.
Let f be a flow. If there exists an augmenting path, then we can
improve f by sending flow along path.
(ii) (iii)
Next slide.
(iii) (i)
This was the Corollary to Lemma 2.
28
Proof of Max-Flow Min-Cut Theorem
We prove both simultaneously by showing the TFAE:
(i) f is a max flow.
(ii)
There is no augmenting path relative to f.
(iii)
There exists a cut (S, T) such that |f| = cap(S, T).
(ii) (iii)
Let f be a flow with no augmenting paths.
Let S be set of vertices reachable from s in residual graph.
–
clearly s S, and t S by definition of f
f
f (e )
e out of S
S
f (e )
T
e in to S
t
u (e )
e out of S
cap (S, T)
s
Original Network
29
Augmenting Path Algorithm
Augment (f, P)
b bottleneck(P)
FOREACH e P
IF (e E) // forward arc
f(e) f(e) + b
ELSE
// backwards arc
f(eR) f(e) - b
RETURN f
FordFulkerson (V, E, s, t)
FOREACH e E
f(e) 0
Gf residual graph
WHILE (there exists augmenting path P)
f augment(f, P)
update Gf
RETURN f
30
Running Time
Assumption: all capacities are integers between 0 and U.
Invariant: every flow value f(e) and every residual capacities uf (e)
remains an integer throughout the algorithm.
Theorem: the algorithm terminates in at most | f * | nU iterations.
Corollary: if U = 1, then algorithm runs in O(mn) time.
Integrality theorem: if all arc capacities are integers, then there exists
a max flow f for which every flow value f(e) is an integer.
Note: algorithm may not terminate on some pathological instances
(with irrational capacities). Moreover, flow value may not even
converge to correct answer.
31
Choosing Good Augmenting Paths
Use care when selecting augmenting paths.
4
0
100
0
100
1 0
s
t
100
100
0
0
2
32
Choosing Good Augmenting Paths
Use care when selecting augmenting paths.
1
0
X
100
4
0
100
1
1 X
0
s
100
t
100
0
X
0 1
2
33
Choosing Good Augmenting Paths
Use care when selecting augmenting paths.
4
1
100
0
100
1 1
s
t
100
100
0
1
2
34
Choosing Good Augmenting Paths
Use care when selecting augmenting paths.
4
1
100
0 1
X
100
0
1 X
1
s
100
t
100
1 X
0
1
2
35
Choosing Good Augmenting Paths
Use care when selecting augmenting paths.
4
1
100
1
100
1 0
s
t
100
100
1
1
2
200 iterations possible.
36
Choosing Good Augmenting Paths
Use care when selecting augmenting paths.
Some choices lead to exponential algorithms.
Clever choices lead to polynomial algorithms.
Goal: choose augmenting paths so that:
Can find augmenting paths efficiently.
Few iterations.
Edmonds-Karp (1972): choose augmenting path with
Max bottleneck capacity.
(fat path)
Sufficiently large capacity.
(capacity-scaling)
Fewest number of arcs.
(shortest path)
37
Capacity Scaling
Intuition: choosing path with highest bottleneck capacity increases
flow by max possible amount.
Don't worry about finding exact highest bottleneck path.
Maintain scaling parameter .
Let Gf () be the subgraph of the residual graph consisting of only
arcs with capacity at least .
4
110
4
102
1
s
122
t
170
2
Gf
110
102
s
t
122
170
2
Gf (100)
38
Capacity Scaling
Intuition: choosing path with highest bottleneck capacity increases
flow by max possible amount.
Don't worry about finding exact highest bottleneck path.
Maintain scaling parameter .
Let Gf () be the subgraph of the residual graph consisting of only
arcs with capacity at least .
ScalingMaxFlow(V, E, s, t)
FOREACH e E, f(e) 0
smallest power of 2 greater than or equal to U
WHILE ( 1)
Gf() -residual graph
WHILE (there exists augmenting path P in Gf())
f augment(f, P)
update Gf()
/ 2
RETURN f
39
Capacity Scaling: Analysis
L1. If all arc capacities are integers, then throughout the algorithm, all
flow and residual capacity values remain integers.
Thus, = 1 Gf() = Gf , so upon termination f is a max flow.
L2. The outer while loop repeats 1 + log2 U times.
Initially U < 2U, and decreases by a factor of 2 each iteration.
L3. Let f be the flow at the end of a -scaling phase. Then value of the
maximum flow is at most | f | + m .
L4. There are at most 2m augmentations per scaling phase.
Let f be the flow at the end of the previous scaling phase.
L3 |f*| | f | + m (2).
Each augmentation in a -phase increases | f | by at least .
Theorem. The algorithm runs in O(m2 log (2U) ) time.
40
Capacity Scaling: Analysis
L3. Let f be the flow at the end of a -scaling phase. Then value of the
maximum flow is at most |f| + m .
We show that at the end of a -phase, there exists a cut (S, T) such
that cap(S, T) | f | + m .
Choose S to be the set of nodes reachable from s in Gf().
–
f
clearly s S, and t S by definition of S
f (e ) f (e )
e out of S
(u (e ) )
t
e in to S
u (e )
e out of S
T
e in to S
e out of S
S
e out of S
s
e in to S
cap(S, T) - mΔ
Original Network
41
Choosing Good Augmenting Paths
Use care when selecting augmenting paths.
Some choices lead to exponential algorithms.
Clever choices lead to polynomial algorithms.
Goal: choose augmenting paths so that:
Can find augmenting paths efficiently.
Few iterations.
Edmonds-Karp (1972): choose augmenting path with
Max bottleneck capacity.
(fat path)
Sufficiently large capacity.
(capacity-scaling)
Fewest number of arcs.
(shortest path)
42
Shortest Augmenting Path
Intuition: choosing path via breadth first search.
Easy to implement.
–
may implement by coincidence!
Finds augmenting path with fewest number of arcs.
ShortestAugmentingPath(V, E, s, t)
FOREACH e E
f(e) 0
Gf residual graph
WHILE (there exists augmenting path)
find such a path P by BFS
f augment(f, P)
update Gf
RETURN f
43
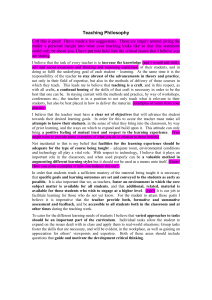
Shortest Augmenting Path: Overview of Analysis
L1. Throughout the algorithm, the length of the shortest path never
decreases.
Proof ahead.
L2. After at most m shortest path augmentations, the length of the
shortest augmenting path strictly increases.
Proof ahead.
Theorem. The shortest augmenting path algorithm runs in O(m2n)
time.
O(m+n) time to find shortest augmenting path via BFS.
O(m) augmentations for paths of exactly k arcs.
If there is an augmenting path, there is a simple one.
1k<n
O(mn) augmentations.
44
Shortest Augmenting Path: Analysis
Level graph of (V, E, s).
For each vertex v, define (v) to be the length (number of arcs) of
shortest path from s to v.
LG = (V, EG) is subgraph of G that contains only those arcs
(v,w) E with (w) = (v) + 1.
2
5
3
6
2
5
s
3
6
t
=0
=1
=2
=3
G:
s
t
L G:
45
Shortest Augmenting Path: Analysis
Level graph of (V, E, s).
For each vertex v, define (v) to be the length (number of arcs) of
shortest path from s to v.
L = (V, F) is subgraph of G that contains only those arcs
(v,w) E with (w) = (v) + 1.
Compute in O(m+n) time using BFS, deleting back and side arcs.
P is a shortest s-v path in G if and only if it is an s-v path L.
2
5
3
6
L:
s
=0
=1
=2
t
=3
46
Shortest Augmenting Path: Analysis
L1. Throughout the algorithm, the length of the shortest path never
decreases.
Let f and f' be flow before and after a shortest path augmentation.
Let L and L' be level graphs of Gf and Gf '
Only back arcs added to Gf '
–
path with back arc has length greater than previous length
2
5
3
6
L
s
=0
=1
=2
2
5
3
6
t
=3
L'
s
t
47
Shortest Augmenting Path: Analysis
L2. After at most m shortest path augmentations, the length of the
shortest augmenting path strictly increases.
At least one arc (the bottleneck arc) is deleted from L after each
augmentation.
No new arcs added to L until length of shortest path strictly
increases.
2
5
3
6
L
s
=0
=1
=2
2
5
3
6
t
=3
L'
s
t
48
Shortest Augmenting Path: Review of Analysis
L1. Throughout the algorithm, the length of the shortest path never
decreases.
L2. After at most m shortest path augmentations, the length of the
shortest augmenting path strictly increases.
Theorem. The shortest augmenting path algorithm runs in O(m2n)
time.
O(m+n) time to find shortest augmenting path via BFS.
O(m) augmentations for paths of exactly k arcs.
O(mn) augmentations.
Note: (mn) augmentations necessary on some networks.
Try to decrease time per augmentation instead.
Dynamic trees O(mn log n)
Simple idea
Sleator-Tarjan, 1983
O(mn2)
49
Shortest Augmenting Path: Improved Version
Two types of augmentations.
Normal augmentation: length of shortest path doesn't change.
Special augmentation: length of shortest path strictly increases.
L3. Group of normal augmentations takes O(mn) time.
Explicitly maintain level graph - it changes by at most 2n arcs after
each normal augmentation.
Start at s, advance along an arc in LG until reach t or get stuck.
–
if reach t, augment and delete at least one arc
– if get stuck, delete node
2
5
3
6
LG
s
=0
=1
=2
t
=3
50
Shortest Augmenting Path: Improved Version
2
5
LG
augment
s
3
6
2
5
t
LG
delete 3
s
3
6
2
5
t
augment
LG
s
6
t
51
Shortest Augmenting Path: Improved Version
2
5
LG
augment
s
6
2
t
5
LG
s
6
t
STOP: length of shortest path must have
strictly increased
52
Shortest Augmenting Path: Improved Version
AdvanceRetreat(V, E, f, s, t)
ARRAY pred[v V]
LG level graph of Gf
v s, pred[v] nil
REPEAT
WHILE (there exists (v,w) LG)
pred[w] v, v w
IF (v = t)
P path defined by pred[]
f augment(f, P)
update LG
v s, pred[v] nil
delete v from LG
UNTIL (v = s)
advance
augment
retreat
RETURN f
53
Shortest Augmenting Path: Improved Version
Two types of augmentations.
Normal augmentation: length of shortest path doesn't change.
Special augmentation: length of shortest path strictly increases.
L3. Group of normal augmentations takes O(mn) time.
Explicitly maintain level graph - it changes by at most 2n arcs after
each normal augmentation.
Start at s, advance along an arc in LG until reach t or get stuck.
–
if reach t, augment and delete at least one arc
– if get stuck, delete node
– at most n advance steps before one of above events
Theorem. Algorithm runs in O(mn2) time.
O(mn) time between special augmentations.
At most n special augmentations.
54
Choosing Good Augmenting Paths: Summary
Method
Augmenting path
Augmentations
nU
Running time
mnU
Max capacity
m log U
m log U (m + n log n)
Capacity scaling
m log U
m2 log U
Improved capacity scaling
m log U
mn log U
Shortest path
mn
m2n
Improved shortest path
mn
mn2
First 4 rules assume arc capacities are between 0 and U.
55
History
Year
Discoverer
Method
Big-Oh
1951
Dantzig
Simplex
mn2U
1955
Ford, Fulkerson
Augmenting path
mnU
1970
Edmonds-Karp
Shortest path
m2n
1970
Dinitz
Shortest path
mn2
1972
Edmonds-Karp, Dinitz
Capacity scaling
m2 log U
1973
Dinitz-Gabow
Capacity scaling
mn log U
1974
Karzanov
Preflow-push
n3
1983
Sleator-Tarjan
Dynamic trees
mn log n
1986
Goldberg-Tarjan
FIFO preflow-push
mn log (n2 / m)
...
...
...
...
Length function
m3/2 log (n2 / m) log U
mn2/3 log (n2 / m) log U
1997
Goldberg-Rao
56