Constraints
advertisement

Monash University
Hybrid Algorithms, Local Search and
ECLiPSe
Overview
Motivations
From Problem to Solution
Solvers
Global Constructive Search Hybrids
Hybrids with Separate Search Routines
Mappings between Models
Hybrid Search
2
Combinatorial Optimisation
Theory
Why aren’t deterministic computers as efficient as
nondeterministic ones?
Practice
Science and Engineering
Configuration and design
Resource and Task Optimisation
Industry and government organisations
3
Applications of CP in Melbourne
Internet Routing and Balancing
Telstra
Supply Chain
Patrick Corp
Berri Ltd
Linfox
Coles Myers
Transportation
Translogix
IBM
CTI
NAB
Construction Scheduling
Synctec
Bovis Lend Lease
Health Systems
Southern Health
4
Four Case Studies
Logistics with Depots
Wincanton Transport
Patrol Despatcher
RAC
Flight Schedule Retimer
BA
Network resilience
Cisco Systems
5
Logistics with Depots
6
Logistics with Depots: Summary
Objectives
Generate feasible schedule
Minimise driver/vehicle/travel costs
Constraints
Collection and delivery time windows
Vehicle capacity data
Travel time data
Vehicle load/unload time data
Driver shift data
Business Benefits
Strategy – which customers to take
Profitability – how much to charge
7
Patrol Despatcher
The RAC’s Birmingham Despatch Centre
8
Patrol Despatcher : Summary
Strategic Objectives
Despatch a years’ worth of jobs
Simulate the company’s operation
Meet constraints/business criteria
Business Benefits
Negotiation with patrols
Test benefits of onsite protocol
Test different resource levels
Test different objectives (cost/QoS)
9
Operational Objectives
Meet real-time requirements
Decisions match business goals
Handle larger regions
Consistency, completeness
Business Benefits (planned)
Cost savings
Quick, fair decisions
Better despatching at “borders”
Flexible business process
Flight Schedule Retimer
10
Flight Schedule Retimer: Summary
Objectives
Retime
scheduled flights
Observing constraints
Minimising changes to existing schedule
Business Benefits
Aircraft
utilisation gains
Slot profile change
Punctuality improvement
11
Network Resilience: Summary
Objectives
For each route passing through a network component, find
an alternative that avoids the component
Separate shared link risk groups
Ensure there is sufficient bandwidth in alternative routes
Business Benefits
Computes minimal network redundancy
Maintains quality of service
Exploits MPLS technology
12
Approaches – Research Communities
Operations Research
Integer/linear programming
Metaheuristics
Generate and improve
Constraint Programming
Constraint programming
13
Combinatorial Optimisation Community:
Big Questions
What problem features best map to what approaches?
Schedule optimisation problem
10,000 variables Time points
50,000 constraints
1 disjunction
Ti Tj
(Ti1 Ti 2) (Tj1 Tj 2)
Can each approach be “informed” by the others?
Why do metaheuristics improve faster than branch and bound?
How do we get from a problem definition to a problem solution?
14
Overview
Motivations
From Problem to Solution
Solvers
Global Constructive Search Hybrids
Hybrids with Separate Search Routines
Mappings between Models
Hybrid Search
15
Problem Definition => Problem Solution
Conceptual Model
PhD
Design Model
Solver Platform
Executable Program
16
Mapping Conceptual to Design Model
Conceptual Model
Add Constraint Behaviour
Add Search
Design Model
17
Logical Transformations
Conceptual Model
Decompose
Transform
Tighten
Link
Conceptual Model
18
Logical Transformations
Conceptual Model:
Decompose:
Transform
Tighten
P
P S1 S 2 ... Sn
Si( X ) S ' i ( X ' )
S ' i ( X ' ) L( X ' )
Link
Si ( X ) S ' i ( X ' ) Ch( X , X ' )
(PC(X) Ch(X, X' ) PC' (X' )
PC' (X' ) Ch(X, X' ) PC(X))
Conceptual Model
19
Final Conceptual Model to Design Model
Conceptual Model
Logic
Solver Choices
Add constraint behaviour
Search Choices
Add search
Design Model
Program
20
Add Constraint Behaviour
Post constraints to chosen solvers
Choose information to export from one solver
to another
Choose information to export from solvers to
search engine
21
Constraint Programming – Nature and Scope
Model
Algorithm
Finite
Domain
Library
22
Interval
Reasoning
Library
Linear
Xpress-MP
CPLEX
Programming
Library
Repair
Library
Add Search
Choose one global or multiple separate
searches
Choose type of search
Choose information to import from and export
to solvers
23
Research Challenge
Example: Workforce Scheduling
Routing
Subproblem
24
Scheduling
What search?
What information?
What control?
Subproblem
Overview
Motivations
From Problem to Solution
Solvers
Global Constructive Search Hybrids
Hybrids with Separate Search Routines
Mappings between Models
Hybrid Search
25
Constraint Behaviour: Solvers
Finite Domain
Linear
Interval
Integer/linear (MIP)
Set
SAT
One-way constraints
26
Communication Between Solvers
Import
Information
Events
constraints
wake(Change,Prior)
variables
Export
27
assignments
constraints
heuristics
interrupt(Prior)
return / failure
post(Change)
Finite Domain Solver Information
Import
Variables and domains
Constraints – primitive,reified,global,…
Export
Instantiation
Domain bounds
Domain sizes
“Active” constraints on a variable
Entailed constraints (disequalities, inequalities, reified)
Disentailed constraints
28
Constraint Behaviour: Solvers
Finite Domain
Linear
Interval
Integer/linear (MIP)
Set
SAT
One-way constraints
29
Linear Solver Information
Import
Linear constraints (2*X + 3*Y – 6*Z =< 24.3)
Optimisation expression (min(2*X –Y))
Export
Optimum value
An optimal solution
Reduced costs, shadow prices
30
Linear Constraints
Optimal solution
Feasible Region
31
Shadow Prices
X-Y =< 12
Feasible Region
Shadow Price
32
Reduced Costs
Feasible Region
33
Reduced Costs
Variable X
Feasible Region
34
Reduced Costs
Feasible Region
Reduced Cost
35
ECLiPSe Linear Solver Interface: eplex
lib(eplex)
An interface between ECLiPSe and an external
LP/MIP solver
XPRESS-MP, a product by Dash Associates
CPLEX, a product by ILOG SA
Motivation to have this link:
Use state-of-the-art linear programming tools
Use ECLiPSe for modelling
Build hybrid solvers
Implementation
36
Tight coupling, using subroutine libraries
Objective Function
Mathematical Programming
Plant
capacity
Transportation
cost
10
1
500
5
5
3
3
400
10
400
B
300
C
7
Modelled as a matrix:
•Each row is one constraint
•Each column is one variable
A1
B1
C1
D1
subject to
A1 +
B1 +
C1 +
D1 +
8
100
37
A
5
300
11
200
8
9
7
2
Client
demand
minimize
10
8
5
9
D
Constraints
+
+
+
+
7
5
5
3
A2
B2
C2
D2
+ 11 A3 +
+ 10 B3 +
+ 8 C3 +
+ 7 D3
A2
B2
C2
D2
+
+
+
+
A3
B3
C3
D3
=
=
=
=
200
400
300
100
A1 + B1 + C1 + D1 500
A2 + B2 + C2 + D2 300
A3 + B3 + C3 + D3 400
Example problem as a matrix
38
A1 A2 A3
B1 B2 B3 C1 C2 C3 D1 D2 D3
1
1
1
0
0
0
0
0
0
0
0
0
=
200
0
0
0
1
1
1
0
0
0
0
0
0
=
400
0
0
0
0
0
0
1
1
1
0
0
0
=
300
0
0
0
0
0
0
0
0
0
1
1
1
=
100
1
0
0
1
0
0
1
0
0
1
0
0
500
0
1
0
0
1
0
0
1
0
0
1
0
300
0
0
1
0
0
1
0
0
1
0
0
1
400
10
7
11
8
5
10
5
5
8
9
3
7
Modelling MP problems in Eplex
Eplex can model multiple MP problems
simultaneously
Each MP problem represented by an eplex
instance :
eplex instance
MP Problem
variables & bounds
X1 X 2
solution values
constraints
... Xm
c1
c2
=
=<
cn
>=
Obj
= Cost
cost
LP / MIP search
39
Transportation Problem in ECLiPSe
:- lib(eplex).
main1(Cost, Vars) :Vars = [A1, A2, A3, B1, B2, B3, C1, C2, C3, D1, D2, D3],
Vars :: 0.0..1.0Inf,
eplex:
eplex:
eplex:
eplex:
(A1
(B1
(C1
(D1
+
+
+
+
A2
B2
C2
D2
+
+
+
+
A3
B3
C3
D3
=:=
=:=
=:=
=:=
200),
400),
300),
100),
eplex: (A1 + B1 + C1 + D1 =< 500),
eplex: (A2 + B2 + C2 + D2 =< 300),
eplex: (A3 + B3 + C3 + D3 =< 400),
eplex: optimize(min(
10*A1 + 7*A2 + 11*A3 +
8*B1 + 5*B2 + 10*B3 +
5*C1 + 5*C2 + 8*C3 +
9*D1 + 3*D2 + 7*D3)).
40
Linear constraints
Non-strict linear equalities and inequalities
eplex:(X=:=Y)
eplex:(X>=Y)
eplex:(X=<Y)
No strict inequalities or disequalities allowed
X and Y are linear expressions
X
123 3.4
+ Expr - Expr
E1 + E2 E1 - E2 Coeff * E2
sum( ListOfExpr )
41
Triggering the solver repeatedly
eplex_solver_setup(+Objective, -Cost, +Options,
+Priority, +TriggerModes)
+Objective
min(Expr) or max(Expr)
-Cost
variable - it does not get instantiated, but only bounded by the solution cost.
+TriggerModes
inst - if a variable was instantiated
bounds - if a variable bound was changed
deviating_bounds - if a variable bound was changed such that its LPsolution was excluded by more than a tolerance.
new_constraint - when a new constraint appears
trigger(Atom) - explicit triggering
42
Retrieving results from eplex instance
eplex_get(+Handle, +What, -Value)
Solver results
typed_solution
reduced_cost
slack
dual_solution
Statistics
simplex_iterations
node_count
statistics
Original setup input
43
vars, ints, constraints, objective
Constraint Behaviour: Solvers
Finite Domain
Linear
Interval
Integer/linear (MIP)
Set
SAT
One-way constraints
44
Interval Solver Information –
for integer and continuous variables
Import
Variables and domains
Integrality (or not…)
Constraints – primitive,reified,global,…
Export
Instantiation
Domain bounds
Domain sizes
“Active” constraints on a variable
Entailed constraints (disequalities, inequalities, reified)
Disentailed constraints
Interfaces Linear Relaxation and FD Solver
45
Integer/linear (MIP) Solver Information
Exponential Cost Solver
Import
Linear constraints
Optimisation expression
Integrality constraints
Export
Optimum value
An optimal solution
Reduced costs, shadow prices
Linear Constraints (“cutting planes”)
Fixed variables
Search node heuristics
Branching heuristics
46
Set Solver Information
Finite Sets of Values
Import
Set variables and domains
Set cardinality variables and domains
Constraints – primitive,reified,global,…
Export
FD information on cardinality variables
Values excluded from set
Values included in set
Entailed/disentailed set constraints
47
SAT Solver Information –
Exponential Cost Solver
Import
Clauses
Export
Feasible solutions
If solver can be suspended, can “export”
Clauses (“nogoods”)
Variable choice heuristics
48
Constraint Behaviour: Solvers
Finite Domain
Linear
Interval
Integer/linear (MIP)
Set
SAT
One-way constraints
49
One-way solver information
Import
One-way constraints (functions)
Heuristic information
Variable (“tentative”) assignments
Export
Inconsistency
Heuristic information
Variable (“tentative”) assignments
50
One-way Solver Examples
X=Y+3
Y:= 2 => X := 5
Y:= 4 => X := 7
Incremental Computation
S = sum{X,Y,Z}
Y := 4 => S := S_old + 4 – Y_old
Application
Var = select(mindomain,{X,Y,Z})
Y \= 4 => ???
Method
Invariant (specialised implementation of incremental one-way solver)
51
One-way Solver in ECLiPSe - repair
Purpose
To maintain non-logical “tentative” information
Library Invocation
lib(repair)
Method
Attach “hidden” information to each variable
Associate events and actions with this info.
52
Tentative Assignments to Avoid Failing
Logical
Assignment
Define Decision Variables
X::1..10
53
X tent_set 8
“X>=5”
Constrain Decision Variables
Search for a Solution
Tentative
Assignment
X=4
X tent_set 4
Fail
Record Conflict
Problem Modelling and Solving
FD
Initialise Decision Variables
Vars::Domain
Constrain Decision Variables
ic: <Cons>
Search for a Solution
54
ic: labeling(Vars)
Repair
Vars tent_set Vals
<Cons> r_conflict Store
repair(Store)
Tentative Invariants
Initialise Decision Variables
[X,Y] tent_set [1,2]
Constrain Decision Variables
Either:
Y =:= X+1 r_conflict a
Or:
Y tent_is X+1
During Search …
X tent_set 3
Record Conflict
Y{4}
55
Overview
Motivations
From Problem to Solution
Solvers
Global Constructive Search Hybrids
Mappings between Models
Hybrid Search
56
Global Constructive Search Hybrid Forms
Add constraint
and wake solvers
Root Node
Node1
Node2
Some of these leaf nodes are our solutions
57
Cooperating Solvers: Intersecting Subproblems
Y
C1
X
Z
C2
Subproblem1
58
Subproblem2
Cooperating Solvers: Copied Variables
Y
C1
X2
X1
Solver1
Keep X1 and X2 in step
Communicate events
Communicate information
59
C2
Z
Solver2
Cooperating Solvers: Copied Variables
Y
C1
X2
X1
X1 >= 10.5
60
X2 >= 11
10.5
Z
integer(X2)
Linear Solver
Info on “X”
C2
Interval Solver
X >=
X1
>=10.5
11
FD and Linear Solver Cooperation
(within a Global Constructive Search)
Motivation
Linking through Channeling Constraints
Forms of Cooperation
61
Motivation for FD Linear Comunication
Performance
Behaviour
62
Motivation for FD Linear Communication:
Performance
FD
e.g. interval propagation
more general constraints
handle integers directly
Favourable example:
Variable Bounds:
[X1,…,X100] :: 1..100
Linear
e.g.
Simplex, Gauss
restricted class of constraints
finds optimum without search
Favourable example:
Variable Bounds:
[X1,X2] :: 1..100
Previous Constraints:
X1 < X2 , … , X98 < X99
Resulting Bounds:
X1 :: 1..2, …, X99 :: 99..100
New Constraint:
X1 >= 3
Result (1 step): failure!
63
New Constraints:
X 1 > X 2, X 2 > X 1
Result (1 step): failure!
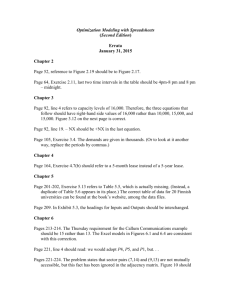
FD and Linear Constraint Solving Performance
Add N variables and trivial constraints
N = 100, 200, 500, 1000, 2000, 5000, 10,000, 20,000, 50,000
The Constraints
for each variable X[J] do
X[J]::1..N,
X[J] >= X[J-1].
The Solvers
FD
CLPQ
CPLEX (run once, after posting ALL constraints)
CPLEX (incremental)
Performance Figures (FD) - X i+1>=Xi
0.5
0
Log.
Time per -0.5
Constraint -1
CLPQ
Inc-CPLEX
CPLEX
FD
-1.5
-2
-2.5
-3
-3.5
-4
2
2.3 2.7
3
3.3 3.7
4
4.3 4.7
Log. # Constraints Added (100 - 50000)
The Less Trivial Case N Propagation Steps per Constraint
Add N variables and constraints
N = 100, 200, 500, 1000, 2000, 5000, 10,000, 20,000, 50,000
The Constraints
for each variable X[J] do
X[J]::1..N,
X[J]-1 >= X[J-1].
The Solvers
FD
CPLEX (run once, after posting ALL constraints)
CPLEX (incremental)
Performance Figures (FD) - X i+1>Xi
0
-0.5
Log.
Time per
-1
Constraint
FD - Xi+1>Xi
Inc-CPLEX
CPLEX
-1.5
-2
-2.5
-3
-3.5
2
2.3 2.7
3
3.3 3.7
4
4.3 4.7
Log. # Constraints Added (100 - 50000)
Motivation for FD Linear Comunication
Performance
Behaviour
68
One-machine Scheduling
Task 1 = Start-time 0..15, Duration 5
Task 2 = Start-time 0..15, Duration 15,
Either Task1 must precede Task2:
0
5
10
15
20
15
20
Or Task2 must precede Task1:
0
Constraint:
69
5
10
no_overlap(S1,5,S2,15).
25
Representing Disjunction
with Auxiliary Boolean Variables
no_overlap(S1,D1,S2,D2) :- S1 >= S2+D2.
no_overlap(S1,D1,S2,D2) :- S2 >= S1+D1.
Choose a “large” number M
Introduce variables [B1,B2] :: 0..1
Replace disjuction with conjunction:
no_overlap(S1,D1,S2,D2,B1,B2) :S1+M-B1*M >= S2+D2,
S2+M-B2*M >= S1+D1,
B1+B2>=1.
Example:
[S1,S2] :: 0..4, no_overlap(S1,3,S2,5,B1,B2), B1=1
=>
fail!
70
Communicating Linear and FD Solvers
Optimisation
Integer Feasibility
X,Y::0..10
Y>= 2*X
X+Y >= 5
Cost = min(X+2*Y)
S1,S2::0..4, B1,B2::0..1
S1 + 10 - B1*10 >= S2 + 3
S2 + 10 - B2*10 >= S1 + 5
B1 + B2 >= 1
Cost = min(S1)
FD
Linear
71
Cost ::0..30
B2=0, B1=1
S1 :: 3..4, S2 ::0..1
Cost >= 25/3
Cost >= 0
Hoist Scheduling
Each product must be dipped in a sequence of tanks.
72
Disjunctive Constraint in Hoist Scheduling
Period = P
1 Hoist
action b
0
T1
1
2
3
T2
4
action a
P
P+T1
1
2
3
P+T2
Disjunctive Constraint on actions a and b :
or
73
T2 >= P+T1+timefull12 + timeempty23
P+T1 >= T2+timefull34 + timeempty41
4
Disjunctive Constraint in Hoist Scheduling
Period = P
2 Hoists
action b: hoist H2
0
T1
1
2
3
T2
4
action a: hoist H1
P
P+T1
1
2
3
P+T2
Disjunctive Constraint on actions a and b :
or
or
74
T2 >= P+T1+timefull12 + timeempty23
P+T1 >= T2+timefull34 + timeempty41
H1 < H2
4
Hoist Performance
75
CP solver
MIP
solver
CP/MP
solver
1 hoist
1 track
96 s
10 s
51 s
2 hoists
1track
> 10 min 34 s
96 s
2 hoists
2 tracks
> 10 min > 10 min
152 s
Hoist Robustness -Algorithm
100 Randomly Generated 2-hoist 2-track Problems
76
Optimal Solutions Found
100
Minimum Time
167 secs
Maximum Time
1146 secs
Average Time
314 secs
Hoist Robustnes - Model
Benchmark Hoist Scheduling Problem
Tank Capacities
Two hoists on one track
Multiple hoists on multiple tracks
77
FD/Linear Hybrid
Previous approaches
Same basic model for
Completely different
each problem class
models
FD and Linear Solver Cooperation
(within a Global Constructive Search)
Motivation
Linking through Channeling Constraints
Forms of Cooperation
78
Different Models in FD and Linear
Distances Table: Data
X1 X2 X3 X4 X5 X6
X2
X1
X5
X4
X3
X6
TSP Problem: Find shortest route
79
X1
0
5
2
4
1
7
X2
5
0
4
7
2
5
X3
2
4
0
4
6
1
X4
4
7
4
0
3
5
X5
1
2
6
3
0
2
X6
7
5
1
5
2
0
ECLiPSe Syntax
Iteration
foreach(El,[a,b,c,d]) do write(El),write(‘ ‘).
for(K,1,4) do write(K), write(‘ ‘).
for(K,1,4),foreach(El,List) do El=K
abcd
1234
List = [1,2,3,4]
Const=a, (foreach(El,List), for(_,1,4), param(Const) do El=Const)
List = [a,a,a,a]
Const=a, (foreach(El,List), for(_,1,4) do El=Const)
List = [_,_,_,_]
1-1 2-2 3-3 4-4
for(K,1,4),for(J,1,4) do write(K-J),write(‘ ‘).
multifor([K,J],[1,1],[3,3]) do write(K-J),write(‘ ‘)
1-1 1-2 1-3 2-1 2-2 2-3 3-1 3-2 3-3
80
ECLiPSe Syntax
Arrays
Struct = f(a,b,c,d), X is Struct[2].
X=b
Matrix = m(f(11,12),f(21,22),f(31,32)), X is Matrix[3,2]
X=32
Matrix = m(f(11,12),f(21,22),f(31,32)), X is Matrix[1..3,2]
X=[12,22,32]
dim(M,[2,2]), A is M[1,2]
M = []([](_,A),[](_,_))
dim(M,[2,3]),
( multifor([K,J],[1,1],[2,3]), param(M) do X is M[K,J], X=K-J)
M = []([](1-1, 1-2, 1-3), [](2-1, 2-2, 2-3))
81
TSP Problem – ECLiPSe FD Design Model
length(Vars,6), ic:(Vars :: 1..6), ic:alldifferent(Vars),
length(Dists,6), ic:(Dists :: 1..10),
( for(J,1,6),
foreach(SJ,Vars),
foreach(DJ,Dists),
param(Data)
do
ListJ is Data[J,1..6]), ic:element(SJ,ListJ,DJ) ),
ic: (Cost =:= sum(Dists))
For example:
ic:element(S3,[2,4,0,4,6,1],D3)
82
TSP Problem – ECLiPSe Linear Design Model
dim(Bools,[6,6]), Bools::0..1,
( for(J,1,6),
param(Bools)
do
eplex: (Bools::0..1),
eplex: (sum(Bools[J,1..6]) =:= 1),
eplex: (sum(Bools[1..6,J]) =:= 1) ),
( multifor([I,J],[1,1],[6,6]),
foreach(C,Costs),
param(Bools,Data)
do
C = Bools[I,J]*Data[I,J] ),
eplex:(Cost =:= sum(Costs)).
83
Mapping FD Variables to Booleans
[ic,eplex]: (Var :: 1..N),
length(Bools,N), eplex: (Bools::0..1), eplex: (sum(Bools) =:= 1),
(foreach(B,Bools), for(Val,1,N), for(E,Exprs) do E = B*Val),
eplex: (Var =:= sum(Exprs)).
Channeling constraint in linear solver
84
Cooperating Solvers: Copied Variables
Channeling constraint in linear solver
Bk
C1
Var
Bk=1
C2
Var
Z
Var=k
Linear Solver
Info on “Var”
85
FD Solver
Cooperating Solvers: Copied Variables
Channeling constraint in linear solver
Bk
C1
Var
Bk=1
Var
Linear Solver
Info on “Var”
86
C2
Var=k
FD Solver
Z
Mapping FD Variables to Booleans
ic:
(Var :: 1..N),
length(Bools,N), [ic,eplex]: (Bools::0..1), eplex:(sum(Bools) =:= 1),
( foreach(B,Bools), for(Val,1,N), param(Var) do
ic: =:=(Var, Val, B)
).
Channeling constraint in FD solver
87
FD and Linear Solver Cooperation
(within a Global Constructive Search)
Motivation
Linking through Channeling Constraints
Forms of Cooperation
88
Information Communicated from FD to Linear Solvers
Variable Bounds
Variable instantiation
Variable remains in linear solver, with identical bounds
Linear Constraints
Delay
MLLP
89
Communicating FD to LP: Delay
X*B >= Y
As soon as B is instantiated to 1, send X>=Y to linear solver
As soon as B is instantiated to 0, send 0>=Y to linear solver
As soon as X is instantiated, send X*B >=Y to linear solver
ECLiPSe Syntax
suspend(eplex: (X*B>=Y), 3, [X,B] -> inst)
90
Communicating FD to LP: MLLP
Hooker’s Mixed Logical Linear Programming
FD(X1,…,Xn) => LP(Y1,…,Ym)
If search or propagation entails FD constraint,
then LP constraint is posted to linear solver
ECLiPSe Syntax
mllp_1(X) X#>5 | eplex: (Y >= X)
91
Information Communicated from Linear to FD Solvers
Directly
Cost Bounds
Indirectly
Reduced costs => Var ≠Val
often by fixing Bval=0
92
Reduced Cost Pruning
Cost
Values ruled out
by reduced cost
Infeasible
Region
Best solution so far
0
0.2
0.4
0.6
0.8
Value of boolean
93
1
Relaxed Optimum
Branch-and-bound (incremental)
Cost
First solution
Solutions
Better solution
Optimal solution
No solution (Proof of optimality)
Lower bound
(relaxed solution)
Iterations:
94
1
2
3
4
Communicating Linear and FD Solvers
Optimisation
X,Y::0..10
Y>= 2*X
X+Y >= 5
Cost = min(X+2*Y)
FD
Linear
95
Cost ::0..30
Cost >= 25/3
Branch-and-bound (incremental)
Cost
First solution
Solutions
Better solution
Optimal solution
No solution (Proof of optimality)
Lower bound
(relaxed solution)
Iterations:
96
1
2
3
4
Global Constructive Search – FD and Linear
Solvers
Add constraint
and wake FD and
linear solvers
Root Node
Node1
Node2
Some of these leaf nodes are our solutions
Reasoning at each node:
Repeat
Reduce FD domains
Tighten linear relaxed cost bound
Until fixpoint
97
Linear and FD Constraints
as Fixpoint Operators
FD fixpoints
Linear Fixpoints
FD&Linear
Information
98
Information Communicated from FD and Linear
to Search Engine
FD
Domain size
Number of active constraints
Linear
Relaxed solution
Reduced costs => “regret”
99
Combining Linear and FD – Horses for Courses
Problem
100
Progressive
Cabinet
Set
Party
Assignment
Partitioning
CP
> 5 mins
9.27 secs
64.68 secs
LP
> 5 mins
> 5 mins
0.18 secs
CP & LP
91.5 secs
13.2 secs
0.71 secs
Overview
Motivations
From Problem to Solution
Solvers
Global Constructive Search Hybrids
Hybrids with Separate Search Routines
Mappings between Models
Hybrid Search
101
Hybridisation Forms with Separate
Subproblem Search Routines
Subproblem A
Search & Solver 1
102
Subproblem B
Search &Solver 2
Hybridisation using “Nogoods”
A
Submodel
Solver
B
Submodel
Solver
Solution to subproblem A is infeasible for subproblem B
=> Add constraint to subproblem A precluding similar solutions
103
Solver Requirements
Extract “Minimal” Cause of Conflict
General
Application-specific
Export Constraints
Treatable by solver A
Exclude current violation
Leave choice points if necessary
Disjunction of alternatives should not preclude any feasible
solutions
104
Different Models in FD and Linear
Distances Table: Data
X1 X2 X3 X4 X5 X6
X2
X1
X5
X4
X3
Flow out of subset >= 1
B
jk
1
K { 4 , 5 , 6} J {1, 2 , 3}
X6
TSP Problem: Find shortest route
105
X1 0
5
2
4
1
7
X2 5
0
4
7
2
5
X3 2
4
0
4
6
1
X4 4
7
4
0
3
5
X5 1
2
6
3
0
2
X6 7
5
1
5
2
0
Hybrisation of FD and One-way solver using nogoods
Subproblem A
Temporal Constraints
Interval Solver
106
Subproblem B
Resource Constraints
One-way Solver
ECLiPSe Repair library
Tentative Values
Vars tent_set Vals
Vars tent_get Vals
Conflict Sets
conflict_constraints(Cset,CCs)
conflict_vars(CVars,CCs)
Constraint Annotations
Constraint r_conflict Cset
Var tent_is Expression
107
Example: Bridge Scheduling
Schedule tasks to build a bridge
Schedule consists of different tasks that share several resources
(eg. excavator, pile-driver)
Some tasks depend on others
Temporal Constraints
e.g time for concrete to set
Disjunctive resource constraints
pile-driver can only be used in one task at a time
108
The Bridge Scheduling Problem
T1
M1
T2
T3
M3
M2
T5
T4
M6
M5
M4
B6
S6
B1
S1
A1
A6
B2
S2
A2
B3
S3
A3
B5
S5
A4
P1
109
B4
S4
P2
A5
Bridge Scheduling Problem
No. Name Description
Duration
1
PA
Beginning of project
0
2
A1
Excavation (abutment 1)
4
3
A2
Excavation (pillar 1)
2
…
8
P1
Foundation Piles 1
20
9
P2
Foundation Piles 2
13
10
U1
Erection of temporary housing
10
11
S1
Formwork (abutment 1)
8
…
17
B1 Concrete Foundation (abut. 1)
1
…
23
AB1 Concrete Setting Time (abut 1)
1
…
29
M1 Masonry work (abutment 1)
16
…
35
L
Delivery of preformed Bearers
2
36
T1
Positioning (preformed bearer 1) 12
…
42
V1
Filling 1
15
…
46
PE
End of Project
0
110
Resource
excavator
excavator
pile-driver
pile-driver
carpentry
concrete-mixer
-
bricklaying
crane
crane
caterpillar
-
Temporal constraints on the Schedule
Precedence
before(Start1,Duration1,Start2)
Maximal delay
before(Start2,-Delay,Start1)
before(Start1,Duration1,Start2) :ic: (Start1 + Duration1 =< Start2).
Resource Constraints
Machine
End
Start
D1
D2
D3
D4
D5
Tasks
noclash(S1,D1,S2,D2) :- ic: (S1>=S2+D2).
noclash(S1,D1,S2,D2) :- ic: (S2>=S1+D1).
112
Non-repair Search: Labeling
before(S1,D,S2),
…
noclash(S0,D0,S1,D1),
…
mylabeling(Starts) :( foreach(S,Starts)
do
mindomain(S,S)
).
113
Repair Search: Probe Backtracking
before(S1,D,S2)
…
noclash(S0,D0,S1,D1) r_conflict cs
…
tent_set_to_min(Vars) :( foreach(Var,Vars),
foreach(Min,Mins)
do
mindomain(Var,Min)
),
Vars tent_set Mins.
Tentative Values are earliest
possible start times
They satisfy temporal
constraints
They may violate resource
constraints
114
A disjunctive constraint is in conflict
Probe can cause violation (overlap)
repair_label :conflict_vars(cs,CVs),
tent_set_to_min(CVs),
conflict_constraints(cs,CCs),
( CCs == [] ->
true
;
CCs = [Constraint|_],
call(Constraint),
%% Fix the constraint
%% create choice point
%% tighten var bounds
repair_label
).
115
Repair Search: Top level
Fix to tentative values after all conflicts resolved
minimize(
( repair_label, Starts tent_get Starts ),
End_date
).
116
Adding Multiples of Linear Constraints
(A) 2X + 3Y =< 7
(B) 3X + 6Y =< 12
A*3: 6X + 9Y =< 21
B*2: 6X + 12Y =< 24
A*3+B*2: 12X + 21Y =< 45
Optimisation expression: 12X + 21Y
Optimum value: 45
Dual values:
117
for constraint A:3
for constraint B:2
Adding Multiples of Linear Constraints
(A) 2X + 3Y =< 8
(B) 3X + 6Y =< 10
A*3: 6X + 9Y =< 24
B*2: 6X + 12Y =< 20
A*3+B*2: 12X + 21Y =< 44
Optimisation expression: 12X + 21Y
Optimum value: 44
Dual values:
118
for constraint A:3
for constraint B:2
Hybridisation Using Benders Decomposition
A
Submodel
Solver
B
Submodel
Solver computing duals
Solution to subproblem A is infeasible for subproblem B
=> Add Benders cut to subproblem A precluding similar solutions
119
Hybridisation using Column Generation
A
Allocate
Tasks
Solver computing duals
B
Assign a
resource
Solver
Solution to subproblem B is used to build solutions to A
=>
Add cost bound focussing B on useful assignments
120
Requirement
Access to Dual Values
Encapsulation of Hybridisation Technique
Automatic generation of Benders Cut/Column
Automatic imposition of cut/cost bound
Automatic detection of stopping condition
Handling of Numerical Instability
Automatic avoidance of looping
User hooks to control tailing off behaviour
121
Plug-and-play with Column Generation
1-Dimensional Cutting Stock Example
Stock:
Boards of length 17
Required: 25 boards of length 3
20 boards of length 5
15 boards of length 9
Minimise: Wastage
122
Plug-and-play with Column Generation
:- lib(ic), lib(colgen).
solve(Cost) :Vars = [Threes,Fives,Nines], Vars #:: 0..10,
3*Threes+5*Fives+9*Nines #= Used,
Used #=< 17,
Waste #= 17-Used,
colgen: (sum(Threes) >= 25),
colgen: (sum(Fives) >= 20),
colgen: (sum(Nines) >= 15),
minimize(my_solve(C,Vars), sum(Waste), Cost).
123
Plug-and-play with Column Generation
my_solve(C,Vars) :labeling(Vars),
colgen: sol(C,Vars).
my_solve routine written by problem solver
Master problem dual automatically created by library
Dual cost constraint automatically added to subproblem
124
Overview
Motivations
From Problem to Solution
Solvers
Global Constructive Search Hybrids
Hybrids with Separate Search Routines
Mappings between Models
Hybrid Search
125
Logical Transformations
Conceptual Model
Decompose
Transform
Tighten
Link
Conceptual Model
126
Problem Decomposition
Send variables to different solvers
Send constraints to different solvers
Send to multiple solvers
Variables
Constraints
127
Linking Constraints to Solvers in ECLiPSe
:- lib(ic).
solve(Digits) :Digits = [S,E,N,D,M,O,R,Y],
integers(Digits),
ic: (Digits :: 0..9),
SEND
+ MORE
= MONEY
ic: alldifferent(Digits),
ic: (S >= 1), ic: (M >= 1),
ic: (1000*S + 100*E + 10*N + D
+ 1000*M + 100*O + 10*R + E
=:= 10000*M + 1000*O + 100*N + 10*E + Y),
labeling(Digits).
128
Requirement: Generic Solver Interface
:- lib(eplex).
solve(Digits) :Digits = [S,E,N,D,M,O,R,Y],
eplex: integers(Digits),
eplex: (Digits :: 0..9),
SEND
+ MORE
= MONEY
alldifferent(0,9,Digits),
eplex: (S >= 1), eplex: (M >= 1),
eplex:
(1000*S + 100*E + 10*N + D
+ 1000*M + 100*O + 10*R + E
=:= 10000*M + 1000*O + 100*N + 10*E + Y),
optimize(min(sum(Digits),_Min).
129
Mapping “SEND+MORE=MONEY” to both ic and eplex
:- lib(ic), lib(eplex).
solve(Digits) :Digits = [S,E,N,D,M,O,R,Y],
ic:integers(Digits),
[ic,eplex]: (Digits :: 0..9),
SEND
+ MORE
= MONEY
ic: alldifferent(Digits),
[ic,eplex]: (S >= 1), [ic,eplex]: M >= 1,
[ic,eplex]: (1000*S + 100*E + 10*N + D
+ 1000*M + 100*O + 10*R + E
=:= 10000*M + 1000*O + 100*N + 10*E + Y),
eplex_solver_setup(min(sum(Digits)),_Min,[],0,[inst]),
labeling(Digits).
130
Logical Transformations
Conceptual Model
Decompose
Transform
Tighten
Link
Conceptual Model
131
Transform
Global constraints
e.g. turn a set of disjunctions into an “atmost”
Dual forms
e.g. Constraints -> variables, variables -> constraints
“Manageable” constraints
e.g. eliminate disjunctions
Separable subproblems
e.g. multiple resource scheduling problem -> schedule each
resource separately
132
A CLP(R) Model
solve(W,X,Y,Z) :imp(X,W), imp(Y,W), two(X,Y,Z).
imp(X,Y) :- X=<Y.
two(X,Y,Z) :- and(X,Y).
two(X,Y,Z) :- and(Y,Z).
two(X,Y,Z) :- and(Z,X).
and(X,Y) :- X>=1, Y>=1.
?- solve(W,X,Y,Z), W=0.
133
Removing Disjunction from a CLP Model
solve(W,X,Y,Z) :imp(X,W), imp(Y,W), two(X,Y,Z).
imp(X,Y) :- X=<Y.
two(X,Y,Z) :- and(X,Y).
two(X,Y,Z) :- and(Y,Z).
two(X,Y,Z) :- and(Z,X).
and(X,Y) :- X>=1, Y>=1.
?- solve(W,X,Y,Z), W=0.
134
solve(W,X,Y,Z, B) :imp(X,W, B), imp(Y,W, B), two(X,Y,Z, B).
imp(X,Y, B) :- X=<Y+ 2-2*B.
two(X,Y,Z, B) :[B1,B2,B3] :: 0..1,
and(X,Y, B1), and(Y,Z, B2), and(Z,X, B3),
B1+B2+B3 >= B.
and(X,Y, B) :- X+ 2-2*B >= 1, Y+ 2-2*B >= 1.
?- solve(W,X,Y,Z, 1), W=0.
Removing Disjunction from a CLP(R) Model
Add boolean to all predicates
solve(W,X,Y,Z, B) :- imp(X,W, B), imp(Y,W, B), two(X,Y,Z, B).
Call the goal with extra boolean=1
?- solve(W,X,Y,Z,1).
Add M*(1-B) to inequations
imp(X,Y, B) :- X=<Y+ 2-2*B.
Replace disjunction with boolean inequations
two(X,Y,Z, B) :[B1,B2,B3] :: 0..1,
and(X,Y, B1), and(Y,Z, B2), and(Z,X, B3),
B1+B2+B3 >= B.
135
Logical Transformations
Conceptual Model
Decompose
Transform
Tighten
Link
Conceptual Model
136
Tighten
By programmer
Experience
Maths
Automatically
Propagation
Intelligent methods
137
Redundant Constraints
Cover a mutilated chess
board with dominoes:
dominoes(List) :length(List,31),
foreach(D,List) do domino(D),
guess(List).
domino(X-Y) :[X,Y] :: 2..63, Z :: 1..7,
(Y #= X+8) or Y #= X+1 and (X+Z)/8 #= _.
guess(List) :for(N,2,63), param(List) do
member(X-Y,List),
(X=N ; Y = N).
138
Redundant Constraints
Cover a mutilated chess
board with dominoes:
dominoes(List) :length(List,31),
foreach(D,List) do domino(D),
bw(List,B,W), B#=30, W#=32,
guess(List).
bw([],0,0).
bw([X-Y|T],B,W) :- bw(T,BR,WR), B #=BR+1, W #= WR+1.
139
Logical Transformations
Conceptual Model
Decompose
Transform
Tighten
Link
Conceptual Model
140
Link
Channeling constraints
Communicating intermediate solutions
141
Summary
Conceptual Model
Add Constraint Behaviour
Add Search
Design Model
142
Overview
Motivations
From Problem to Solution
Solvers
Global Constructive Search Hybrids
Hybrids with Separate Search Routines
Mappings between Models
Hybrid Search
143
Hybrid Search
Incomplete Constructive Search
Local Search
Hybrid Schemes
Current Framework
144
Incomplete Constructive Search - Labelling
Select a variable
Allocate credit to each value in the variable’s domain
Choose a value
Credit Based Search
Incoming Credit:
Allocated credit:
145
16
8
4
2
1
1
0
Incomplete Constructive Search - Labelling
Select a variable
Allocate credit to each value in the variable’s domain
Choose a value
Best N
Incoming Credit:
Allocated credit:
146
3
3
3
3
0
0
0
Incomplete Constructive Search - Labelling
Select a variable
Allocate credit to each value in the variable’s domain
Choose a value, and take its credit
Limited Discrepancy Search
Incoming Credit:
Allocated credit:
147
2
2
1
0
0
0
0
Incomplete Constructive Search- Other
Step search
X=a v X ≠ a
2-variable constraints
S1 ≥ S2+D2 v S2 ≥ S1+D1
Range splitting
X>4v X≤4
148
Based on Value Choice Heuristics
Problem-specific
N-queens: middle-out
Relaxed solution
Linear relaxation
Tree relaxation
Relaxed local search (Kamarainen)
Previous solution
Limited Discrepancy Search
Only count a discrepancy when two heuristics agree
149
Local Search
Min conflicts
change a variable in conflict
(improves expected time to solve 2-SAT)
Guided Local Search
Escape from local opt. by penalising solution “features”
? Can we change viewpoint so “features” are represented
by new-variable assignments ?
? Are feature variables also decision variables ?
150
Hybrid Schemes
MIP and Row Generation
Repair variables in conflict
Iterated search methods
Local search hybrids
Core/dependent variables
Large Neighbourhoods
151
MIP – Bridge Scheduling
before(S1,D,S2),
…
noclash(S0,D0,S1,D1),
…
optimize(End,Cost).
noclash(S1,D1,S2,D2) :eplex:[B1,B2]::0..1,
eplex:integers([B1,B2]),
eplex:(S1+M-B1*M>=S2+D2),
eplex:(S2+M-B2*M>=S1+D1),
eplex:(B1+B2 >= 1)
Solve linear relaxation
Find 0+e < Bool < 1-e
Branch on Bool =< 0 or Bool >= 1
effectively branch on S2>=S1+D1 or S1 >= S2+D2
152
Hybrid Bridge Scheduling
Probe can cause violation (overlap)
repair_label :conflict_vars(CVs),
tent_set_to_min(CVs),
conflict_constraints(cs,CCs),
( CCs == [] ->
true
;
CCs = [Constraint|_],
call(Constraint),
%% Fix the constraint
%% create choice point
%% affect probe
repair_label
).
153
A repair heuristic
Pick a constraint according to a heuristic
noclash(S0,D0,S1,D1) r_conflict cs - tasks(Task0,Task1)
select_constraint(TaskPairs,SelectedPair) :(
foreach(TaskPair,TaskPairs),
foreach(Key-TaskPair,KeyedCCs)
do
TaskPair = tasks(
task with [duration:D0] ,
task with [duration:D1]),
Key is min(D0,D1)
),
sort(1,>,KeyedCCs,[_- SelectedPair|_]).
154
Results – MIP vs Hybrid: LP Nodes
20000
18000
16000
LP Nodes
14000
12000
10000
8000
6000
4000
2000
0
10
20
Number of Activities
155
50Integer/Linear
Programming
Unimodular Probing
Exploring search spaces
partial assignments
Tree search:
• constructive (partial/total assignments)
• systematic
• complete or incomplete
“Local” search:
• move-based (only total assignments)
• random or systematic
• incomplete
156
A Tentative Assignment
The Conflict Region
Remaining Variables
Changed Variables
157
Conflict
Region
of Violated
Constraints
Tree Search Employing Tentative Assignments
a
a
c
cb
b
c
c
c
158
a
Local
Tree Search with Tentative Assignments
And with Finite Domains
Initialise Decision Variables
Vars::Domain,
Vars tent_set Vals
Constrain Decision Variables
ic: <Cons>
<Cons> r_conflict a
Search for a Solution
159
search(a) :( find_conflict( a, Var) ->
change_tent_val(Var),
ic:indomain(Var),
search(a)
;
true
).
Local Search - algorithm template
local_search:
set starting state
while global_condition
while local_condition
select a move
if acceptable
do the move
if new optimum
remember it
endwhile
set restart state
endwhile
160
Local Search instances
Algorithm parameters:
starting (and restarting) state
global and local condition
possible moves and how to select one
when is a move accepted
Different parameters yield different
algorithms:
random walk
hill climbing
simulated annealing
tabu search
... and many variants
161
Hill climbing
162
hill_climb(MaxTries, MaxIter, VarArr, Profit, Opt) :init_tent_values(VarArr, 0),
%
(
for(I,1,MaxTries),
%
fromto(0, Opt1, Opt4, Opt),
param(MaxIter,Profit,VarArr)
do
(
for(J,1,MaxIter),
%
fromto(Opt1, Opt2, Opt3, Opt4),
param(I,VarArr,Profit)
do
Profit tent_get PrevProfit,
(
flip_random(VarArr),
%
Profit tent_get CurrentProfit,
CurrentProfit > PrevProfit,
%
conflict_constraints(cap,[])
->
( CurrentProfit > Opt2 ->
%
printf("Found solution with
Opt3=CurrentProfit
%
;
Opt3=Opt2
%
)
;
Opt3=Opt2
%
)
),
init_tent_values(VarArr, 0)
%
).
starting solution
global condition
local condition
try a move
is it uphill?
% is it a solution?
is it new optimum?
profit %w%n", [CurrentProfit]),
accept and remember
accept
reject (move undone)
restart
Techniques used here
Move operation and acceptance test:
They are within the condition part of the if-then-else construct, so:
If the acceptance test fails (no solution or objective not improved) the
move is automatically undone by backtracking!
Detecting solutions:
Constraint satisfaction is checked by checking whether the conflict
constraint set is empty
Monitoring cost/profit:
Retrieve tentative value of Profit-variable before and after the move to
check whether it is uphill
Since the move changes the tentative values of some variable(s),
tent_is/2 will automatically update the Profit variable!
163
Interleaved Search Methods
Interleaved Construction and repair
1) Construct a partial solution till no consistent extension
2) Make this partial solution “tentative”
3) Choose a value for the “next” variable
4) Repair the tentative solution
Instances
Greedy construction + local search repair
Weak commitment – repair by constructive search
Iterated search – retain completeness by distinguishing instantiated and
repairable variables
165
From Local to Global
Local search on small set of “driving” variables
Constructive search to complete solution and cost
Move by unfixing part of solution
Create move by constructive search
Pesant – best neighbour
Large neighbourhood search
Linear optimisation (Le Pape)
166
Current Framework
partial assignments
Move between (consistent) partial solutions
Move “upwards” by unfixing a variable
Move “downwards” by fixing a variable
Limitations of diagram:
Should go to ancestor node
Should rearrange tree after move
167
Current Framework
Unfix
Which variable?
What dependency information should be kept?
Fix
Which variable?
What propagation?
Move by unfixing and fixing
Can this successfully encompass complex moves, e.g.2-swaps?
Is there a “viewpoint” that makes this equivalent to unfix+fix?
168
Summary
Separate Model from Solution
No
Separate Constraint Behaviour from Search
No
Bring together MP, CP and SSP
No
Consequence
There’s lots to be done
169