Envir2
advertisement

Crowd Simulations
Sashi Kumar Penta
Robotics – Class Presentation
The UNIVERSITY of NORTH CAROLINA at CHAPEL HILL
Overview
• Motivation
• Background
• Behavior Planning for Character
Animation, Kuffner et.al, Symposium on
Computer Animation 2005
• Continuum Crowds, Adrein et.al,
SIGGRAPH 2006
• Summary
2
The UNIVERSITY of NORTH CAROLINA at CHAPEL HILL
Motivation
• Crowds are every where!!
• Motivating video Clip
• Movies
♦ The Chronicles of Nornia – The witch, The Lion
and The ward robe
♦ The Lord of the ring
♦ I, Robot, etc
3
The UNIVERSITY of NORTH CAROLINA at CHAPEL HILL
Applications
Courtesy: Illknur
• Entertainment industry (animation
production, computer games)
• Training of police & military
(demonstrations, riots handling)
• Architecture (planning of buildings, towns,
visualization)
• Safety science (evacuation of buildings,
ships, airplanes)
• Sociology (crowd behavior)
• Transportation research for urban planning
4
The UNIVERSITY of NORTH CAROLINA at CHAPEL HILL
Background
• Motion-graph approaches
♦ [Gleicher et. al TOG 2003]
♦ [Kuffner et. al SCA 2005]
• Static potential fields
♦ [Kirchner 2002]
• Continuous density field
♦ [Hughes 2003]
♦ [Adrien et. al SIGGRAPH 2006]
5
The UNIVERSITY of NORTH CAROLINA at CHAPEL HILL
Behavior Planning for
Character Animation, Kuffner
et.al, SCA 2005
The UNIVERSITY of NORTH CAROLINA at CHAPEL HILL
Abstract
• Automatically generate realistic
motions for animated characters
• Motion
clips
- amount
FSM -ofmovements
From
small
data
of a virtual character
• Global search of the FSM – a
sequence of behaviors for the
character
7
The UNIVERSITY of NORTH CAROLINA at CHAPEL HILL
Behavior Finite-State Machine
• Behavior FSM defines movement
capabilities of the character
• Each state consists of a collection of
motion clips that represent a highlevel behavior
• Each directed edge represents a
possible transition b/w two behaviors
• There can be multiple motion clips
with in a state.
8
The UNIVERSITY of NORTH CAROLINA at CHAPEL HILL
Environment Abstraction
• Environment as a 2D height-field gridmap
• Gridmap also encodes
♦ Obstacles that the character should avoid
♦ Free space where character can navigate
♦ Information about special obstacles such as an archway
• Height value is used so that we can
represent terrains with slopes or hills.
• Virtual character is bounded by a cylinder
with radius r & position is the center of the
cylinder
9
The UNIVERSITY of NORTH CAROLINA at CHAPEL HILL
Data structures
• A tree with nodes that record
explored states in the FSM
♦ Each node in the tree stores the motion
clip, position, orientation, time and cost
• Priority queue of FSM states
ordered by cost, which represent
potential nodes to be expanding
during the next search iteration
10
The UNIVERSITY of NORTH CAROLINA at CHAPEL HILL
A* - search
• Total cost =
( cost of the path up to that node) +
(expected cost to reach the goal)
• Using A*-search, The planner
iteratively expands the lowest cost
node in the queue until either the a
solution is found or the queue is
empty.
11
The UNIVERSITY of NORTH CAROLINA at CHAPEL HILL
ALGORITHM 1: BEHAVIOR PLANNER
FunctionFTreturns
takes the input
Function
set of
Function
G determinesthe
if we
state sA
an
action
a as
in and
actions
that
theas
character
should
expand
Snext
a
and returns
the
isparameters
allowed
take
from sbest
child
of sbest intothe
tree.
output state sout
12
The UNIVERSITY of NORTH CAROLINA at CHAPEL HILL
Motion Generation & Blending
• Search algorithm returns a
sequence of behaviors
• Sequence is converted into an
actual motion for the character
• Blending: to smooth out any
slight discontinuities where the
transitions b/w behaviors occur.
13
The UNIVERSITY of NORTH CAROLINA at CHAPEL HILL
Advantages
•
•
•
•
•
•
14
Scalability
Memory Usage
Intuitive Structure
Generality
Optimality
Anytime
The UNIVERSITY of NORTH CAROLINA at CHAPEL HILL
Limitations
• This technique requires an
existence of a behavior FSM
• This technique expects the data
has been appropriately
segmented & categorized
15
The UNIVERSITY of NORTH CAROLINA at CHAPEL HILL
Results
16
The UNIVERSITY of NORTH CAROLINA at CHAPEL HILL
17
The UNIVERSITY of NORTH CAROLINA at CHAPEL HILL
What needs to be taken care …
♦ Individual human motion
♦ Environmental constraints
♦ Intelligent path planning
Large group of people exhibit behavior of
enormous complexity and subtlety.
♦ Dynamic interactions between people
18
The UNIVERSITY of NORTH CAROLINA at CHAPEL HILL
Previous methods
• Agent based methods
♦ Funge et al. [1999]
♦ Shao and Terzopoulos [2005]
♦ Massive Software [2006]
• Graph based techniques
♦ Bayazit et al. [2002]
♦ Kuffner et al. [2005]
• Static potential fields
♦ Goldeinstein et al. [2001]
• Continuous density field
♦ Hughes [2002]
♦ Adrien et. al [2006]
19
The UNIVERSITY of NORTH CAROLINA at CHAPEL HILL
Agent based methods
• Pros
♦ Operate with each individual making independent
decisions
♦ Capture each person’s unique situation: visibility,
proximity of other pedestrians, etc
♦ Different simulation parameter may be defined for
each crowd member
• Cons
♦ Computationally expensive
♦ Difficult to develop behavioral rules that
consistently produce realistic motion
20
The UNIVERSITY of NORTH CAROLINA at CHAPEL HILL
Key points
• Real-time
crowd model based on
Dynamic potential field
continuum dynamics
• Global navigation
with moving
Interactive rates
obstacles such as other people
Smooth
flow
• Motion of large
crowds
without
need for explicit collision
Emergent phenomena
avoidance
21
The UNIVERSITY of NORTH CAROLINA at CHAPEL HILL
The Governing Equations
• Hypothesis 1:
♦ Each person is trying to reach a geographic goal G
R2
• Hypothesis 2:
♦ People move at the maximum speed possible.
♦ Maximum speed field f
♦ Where
• Hypothesis 3:
♦ There exist a discomfort field g so that, people
would prefer to be a point x rather than x’ if
g(x’) > g(x)
22
The UNIVERSITY of NORTH CAROLINA at CHAPEL HILL
Tying together – Hypothesis 4
• People choose paths so as to
minimize a linear combination of
♦ The length of the path
♦ The amount of time to the destination
♦ The discomfort felt, per unit time, along the path
• Hypothesis 4:
♦ A path P that minimizes
23
The UNIVERSITY of NORTH CAROLINA at CHAPEL HILL
Optimal path Computation
• Suppose, Cost function
every where equal to the cost of the
optimal path to the goal.
• Optimal strategy: to move the
opposite the gradient of this function.
• Potential function ( ) : by following
set of all optimal paths outwards from
the goal.
♦ In the goal
♦ Every where,
24
=0
The UNIVERSITY of NORTH CAROLINA at CHAPEL HILL
Speed field
• Speed is a density-dependent variable
• Crowd density field
• Low density (< min): depends on slope
• High density (> max): depends vel of crowd
• Medium density (> min ; < max)
25
The UNIVERSITY of NORTH CAROLINA at CHAPEL HILL
Models of the future
• Predictive discomfort
♦ Future path planning through a
constantly updated static view of
environment.
• Expected periodic changes
♦ When the field deterministically changes
over time
26
The UNIVERSITY of NORTH CAROLINA at CHAPEL HILL
Algorithm
• For each time step:
♦ Convert the crowd to a density field.
♦ For each group:
• Construct the unit cost field C.
• Construct the potential
and it’s
gradient
• Update the people’s locations
♦ Enforce the minimum distance
between people
27
The UNIVERSITY of NORTH CAROLINA at CHAPEL HILL
Implementation details
• Physical fields as 2D arrays of floating point
numbers.
♦ Scalar fields : defined at the center of each grid cell
• Its true for average velocity (
), stored as pair of floats
♦ Anisotropic fields : those depend on both position and
direction
• Stored with four floats per
cell corresponding to
= {0o, 90o, 180o, 270o} , i.e.
EAST, NORTH, WEST and SOUTH
faces of each cell
28
The UNIVERSITY of NORTH CAROLINA at CHAPEL HILL
Density Conversion
•
•
“Splat” the crowd particles onto a density
grid, to compute speed field which are
dependent on density
Requirements of density function
1. Must be continuous w.r.t location of the people
♦
to avoid sharp discontinuities in density and subsequently to
the speed
2. Each person should contribute no less than
to their
own grid cell, but no more than
to any neighboring
grid cell
♦
29
to ensure each individual is not affected by its own
contribution to the density field
The UNIVERSITY of NORTH CAROLINA at CHAPEL HILL
Density Conversion ctd..
• For each person, we find the closest cell
center whose coordinates are both less than
that of the person
• Relative coordinates
of that person
w.r.t the cell center
• Person’s density then added
to the grid as
30
The UNIVERSITY of NORTH CAROLINA at CHAPEL HILL
Unit cost field
•
Compute speed field f
•
Then calculate cost field C using
•
f and C are anisotropic
♦
We would evaluate the speed
and discomfort at the cell into
which the person would be
moving if they choose that direction
31
The UNIVERSITY of NORTH CAROLINA at CHAPEL HILL
Dynamic Potential Field
•
Constructing is the dynamic potential is
the most complex and time consuming
step of the algorithm
Implicit eikonal equation – Solution
•
♦
♦
♦
♦
♦
32
Assign the potential field inside the goal to 0; include these cells in
KNOWN cells; all other to UNKNOWN ;
UNKNOWN cells adjacent to KNOWN cells are included in the
CANDIDATE cells and we approximate at these locations by solving
a finite difference approximation to
The CANDIDATE cell with the lowest potential is then included in the
KNOWN cells and its neighbors are introduced into the CANDIDATE
set by re-approximating the potentials at these cells
This process is repeated, propagating the KNOWN cells outwards
from the goal until all cells are defined.
HEAP DATA STRUCTURE : O(N log N)
The UNIVERSITY of NORTH CAROLINA at CHAPEL HILL
Finite difference approximation
• First find the less costly adjacent grid cell along the
both x- and y-axis
• Solve the equation for
• Once we have computed , we
take its difference with the neighboring
grid cells in the upwind direction gives us
• Renormalize the gradient, multiply by the speed in
the appropriate directions to compute the velocity
field
at that point
33
The UNIVERSITY of NORTH CAROLINA at CHAPEL HILL
Crowd Advection
• Once velocity field is known
Each person’s position is displaced by their
velocity, which is effectively computing
an Euler integration to
• Min displacement Enforcement
♦ All pairs within a threshold distance,
symmetrically pushed apart so that min
distances are preserved
34
The UNIVERSITY of NORTH CAROLINA at CHAPEL HILL
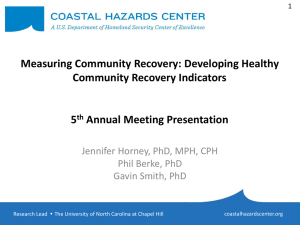
General Algorithm Overview
Grids
Density
Potential Fields
New positions
Goal
Boundary
35
The UNIVERSITY of NORTH CAROLINA at CHAPEL HILL
Results
Video
36
The UNIVERSITY of NORTH CAROLINA at CHAPEL HILL
Contributions
• Integrates both global navigation &
local collision avoidance into one
framework
• Velocity dependent term: which
induces lane formation
• Distance based term: which stabilizes
the flow
• Complexity depend on the number of
grid cells
37
The UNIVERSITY of NORTH CAROLINA at CHAPEL HILL
Limitations
•
•
•
•
•
Complex heterogeneous motion
Individual path planning
Depends on the number of groups
Depends on the resolution
Approximations
♦ Dynamic potential field
♦ Minimum distance enforcement to remove visual
unpleasant artifacts
38
The UNIVERSITY of NORTH CAROLINA at CHAPEL HILL
What remains challenging
• Individual behavior planning in
crowds
• Inertia – walking & running
♦ 4D eikonal equation (Position and Velocity)
• Potential function across nonuniform
grids for speed up
♦ Sparse data points in areas with few people
♦ Finer discretizations in areas of congestion
39
The UNIVERSITY of NORTH CAROLINA at CHAPEL HILL
Summary
• Behavior planning approach to
automatically generate realistic
motions for animated characters
• Crowd simulation framework
based on a continuum
perspective
40
The UNIVERSITY of NORTH CAROLINA at CHAPEL HILL
Questions?
41
The UNIVERSITY of NORTH CAROLINA at CHAPEL HILL
Thank you!!
42
The UNIVERSITY of NORTH CAROLINA at CHAPEL HILL