The Shooting Method for
Boundary-value Problems
Douglas Wilhelm Harder, M.Math. LEL
Department of Electrical and Computer Engineering
University of Waterloo
Waterloo, Ontario, Canada
ece.uwaterloo.ca
dwharder@alumni.uwaterloo.ca
© 2012 by Douglas Wilhelm Harder. Some rights reserved.
The Shooting Method for Boundary-value Problems
Outline
This topic to approximating boundary-value problems
– We will describe boundary-value problems (BVPs)
– We will look at solutions with linear ordinary differential
equations (ODEs)
– We will consider solutions for non-linear ODEs
• This will require successive approximations using the secant
method
2
The Shooting Method for Boundary-value Problems
Outcomes Based Learning Objectives
By the end of this laboratory, you will understand:
– Boundary-value problems (BVPs)
– How to use an initial-value problem (IVP) solver to approximate
solutions to BVPs
– The solution to linear BVPs
– The application of the secant method to solve non-linear BVPs
3
The Shooting Method for Boundary-value Problems
Using Matlab
These methods assume that the student has written the
initial-value problem solver pd45 with the signature
dp45( f, x_rng, u0, h, eps_abs )
which uses the Dormand-Prince method
If this routine is not available, you are welcome to use
the built-in Matlab routine ode45 which has the similar
signature
ode45( f, x_rng, u0 )
4
The Shooting Method for Boundary-value Problems
2nd-order ODEs
A boundary-value problem in one dimension is any 2ndorder ODE
F(x, u(x), u(1)(x), u(2)(x)) = 0
with two constraints
u(a) = ua
u(b) = ub
In general, we will look at functions of the form
u(2)(x) = f(x, u(x), u(1)(x))
5
The Shooting Method for Boundary-value Problems
2nd-order ODEs
Consider the corresponding initial-value problem for this
2nd-order ODE
F(x, u(x), u(1)(x), u(2)(x)) = 0
with two constraints
u(a) = ua
u(1)(a) = ua(1)
Here we specify the slope at the left-hand point x = a
6
The Shooting Method for Boundary-value Problems
2nd-order ODEs
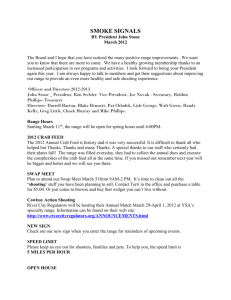
Thus, a boundary-value problem could be restated as:
– Given one initial condition u(a) = ua, what slope is required at that
initial point so that the solution to that initial condition passes
through the point (b, ub)?
(b, ub)
(a, ua)
7
The Shooting Method for Boundary-value Problems
2nd-order ODEs
We will consider two possible cases:
– When the ODE is linear, and
– When it is not
(b, ub)
(a, ua)
8
The Shooting Method for Boundary-value Problems
2nd-order Linear ODEs
A 2nd-order ODE is said to be linear if it can be written as
u(2)(x) + q(x) u(1)(x) + r(x) u(x) = g(x)
or
u(2)(x) = g(x) – q(x) u(1)(x) – r(x) u(x)
We will also consider the corresponding homogenous
LODE:
u(2)(x) + q(x) u(1)(x) + r(x) u(x) = 0
or
u(2)(x) = –q(x) u(1)(x) – r(x) u(x)
9
The Shooting Method for Boundary-value Problems
2nd-order Linear ODEs
To demonstrate 2nd-order LODEs, we will consider the
example
u 2 x sin x u 1 x u x 1
u 2 1.5
u 3 2.5
The corresponding homogeneous LODE is the
u 2 x sin x u 1 x u x 0
10
The Shooting Method for Boundary-value Problems
11
2nd-order Linear ODEs
Recall that if ug(x) is a solution to a 2nd-order LODE and
u0(x) is a solution to the corresponding homogenous
LODE, then
ug(x) + c·u0(x)
is also a solution the LODE
d2
d
u
x
cu
x
q
x
u g x cu0 x r x u g x cu0 x
0
2 g
dx
dx
2
2
1
1
u g x c u0 x q x u g x cq x u0 x r x u g x cr x u0 x
g(x)
0
u g x q x u g x r x u g x c u0
2
g x c 0
g x
1
2
x q x u01 x r x u0 x
The Shooting Method for Boundary-value Problems
2nd-order Linear ODEs
Suppose we have redefine a boundary-value problem in
terms of two IVPs, the first on the LODE with constraints
u a ua
u a 0
1
and the second on the homogenous LODE with
constraints
u a 0
u a 1
1
Let ug(x) and u0(x) be the solutions, respectively
12
The Shooting Method for Boundary-value Problems
13
2nd-order Linear ODEs
For example, given the LODE from before, we create the
two IVPs
u 2 x sin x u 1 x u x 1
u 2 1.5
u 1 2 0
(b, ub)
u 2 x sin x u 1 x u x 0
u 2 0
(a, ua)
ug(x)
u 1 2 1
The plots of the solutions:
u0(x)
The Shooting Method for Boundary-value Problems
14
2nd-order Linear ODEs
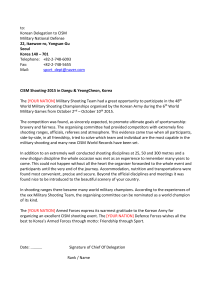
Having found these two solutions, ug(x) and u0(x), we
now want to find a linear combination
u g x cu0 x
of these two such that it satisfies the second boundary
value
(b, u )
b
– For example, here we see
ug(x), ug(x) + u0(x), and ug(x) – u0(x)
ug(x) + u0(x)
(a, ua)
It seems ug(x) + 2u0(x) will pass
close to the second boundary point
ug(x)
ug(x) – u0(x)
The Shooting Method for Boundary-value Problems
15
2nd-order Linear ODEs
We want to find the appropriate linear combination
u g x cu0 x
to match our second boundary condition
First, we note u g a cu0 a ua c 0 ua
We want
u g b cu0 b ub
Solving this for c yields c
ub u g b
u0 b
u g a ua
u g a 0
1
u0 a 0
u0 a 1
1
The Shooting Method for Boundary-value Problems
2nd-order Linear ODEs
Easy enough; however, recall that we must find ug(x) and
u0(x) but if we use dp45, the step sizes may be
different…
Solution: define a system of two uncoupled equations
and unknowns and solve them simultaneously
u(2)(x) = g(x) – q(x) u(1)(x) – r(x) u(x)
u(2)(x) = 0 – q(x) u(1)(x) – r(x) u(x)
16
The Shooting Method for Boundary-value Problems
2nd-order Linear ODEs
Using our techniques from Laboratory 5, we can write
this as a system of IVPs:
w1(1)(x) = w2 (x)
w2(1)(x) = g(x) – q(x) w2(x) – r(x) w1(x)
w3(1)(x) = w4 (x)
w4(1)(x) = 0 – q(x) w4(x) – r(x) w3(x)
w1(a) = ua
w2(a) = 0
w3(a) = 0
w4(a) = 1
ug(x) = w1(x)
ug(1)(x) = w2(x)
u0(x) = w3(x)
u0(1)(x) = w4(x)
17
The Shooting Method for Boundary-value Problems
2nd-order Linear ODEs
For example, consider the boundary-value problem
u 2 x sin x u 1 x u x 1
u 2 1.5
u 3 2.5
The Matlab function would be:
function [dw] = f6a( x, w )
dw = [w(2);
1 - sin(x)*w(2) - w(1);
w(4);
0 - sin(x)*w(4) - w(3)];
end
with the initial conditions [u_a, 0, 0, 1]'
18
The Shooting Method for Boundary-value Problems
2nd-order Linear ODEs
For our example, we would run the following code:
a = 2; b = 3; u_a = 1.5; u_b = 2.5;
[x6a, u6a] = dp45( @f6a, [a, b], [u_a 0 0 1]', 0.01, 1e-8 );
c6a = (u_b - u6a(1, end))/u6a(3, end)
c6a =
1.991628911663175
u6a_soln = u6a(1, :) + c6a*u6a(3, :);
plot( x6a, u6a_soln, 'r' )
ylim( [0, 2.5] )
u6a_soln(1)
ans =
1.500000000000000
u6a_soln(end)
ans =
2.500000000000000
19
The Shooting Method for Boundary-value Problems
2nd-order Linear ODEs
Maple can find an answer, but it’s not nice…
> a := 2; b := 3; u_a := 1.5; u_b := 2.5;
> dsolve( {(D@@2)(u)(x) + sin(x)*D(u)(x) + u(x) = 1, u(a)=u_a, u(b)=u_b} );
20
The Shooting Method for Boundary-value Problems
2nd-order Linear ODEs
It takes Maple about two minute to plot the same figure
– Note: this is not an issue with Maple—it is giving you the exact
solution and not a numeric approximation
21
The Shooting Method for Boundary-value Problems
2nd-order Linear ODEs: Example
For example, consider the boundary-value problem
u(2)(x) + 4 u(1)(x) + 7x u(x) = sin(x)
u(2) = 1.5
u(3) = 2.5
The Matlab function would be:
function [dw] = f6b( x, w )
dw = [w(2);
sin(x) - 4*w(2) - 7*x*w(1);
w(4);
0
- 4*w(4) - 7*x*w(3)];
end
22
The Shooting Method for Boundary-value Problems
2nd-order Linear ODEs: Example
For example, consider
a = 2; b =
[x6b, u6b]
u6b_soln =
plot( x6b,
grid
3; u_a = 1.5; u_b = 2.5;
= dp45( @f6b, [a, b], [u_a 0 0 1]', 0.01, 1e-4 );
u6b(1,:) + (u_b - u6b(1,end))/u6b(3,end)*u6b(3,:);
u6b_soln, 'o-' );
23
The Shooting Method for Boundary-value Problems
2nd-order Linear ODEs: Example
Maple can find an answer, but it’s not nice…
> a := 2; b := 3; u_a := 1.5; u_b := 2.5;
> dsolve( {(D@@2)(u)(x) + 4*D(u)(x) + 7*x*u(x) = sin(x),
u(a) = u_a, u(b) = u_b}, u(x) );
24
The Shooting Method for Boundary-value Problems
2nd-order Linear ODEs: Example
Comparing the results with Maple’s plot, we see they are
similar
25
The Shooting Method for Boundary-value Problems
2nd-order Linear ODEs: Example
If we repeat using b = 4, we get significantly more varying,
but still similar, graphs
26
The Shooting Method for Boundary-value Problems
2nd-order Non-linear ODEs
What happens if the ODE is not linear?
– In this case, there is no guarantee that we can find a solution
using this simple technique
– Instead, we will use
u(2)(x) = f(x, u(x), u(1)(x))
and let us(x) be the solution to the IVP
u(a) = ua
u(1) (a) = s
Now, define a new function
err(s) = us(b) – ub
27
The Shooting Method for Boundary-value Problems
2nd-order Non-linear ODEs
When this function has a zero, we have a solution to the
boundary-value problem
err(s) = us(b) – ub
What is err(s) in Matlab?
function [du_b] = err_shot( s )
[t_out, u_out] = ...
dp45( @f, [a, b], [u_a, s], h, eps_abs );
du_b = u_out(1, end) - u_b;
end
28
The Shooting Method for Boundary-value Problems
29
2nd-order Non-linear ODEs
When this function has a zero, we have a solution to
the boundary-value problem
err(s) = us(b) – ub
In reality, however, it will require a number of other
parameters:
function [du_b] = err_shot(s, f, x_rng, u_bndry, h, eps_abs)
u_a = u_bndry(1);
u_b = u_bndry(2);
[~, u_out] = dp45( f, x_rng, [u_a, s]', h, eps_abs );
du_b = u_out(1, end) - u_b;
end
The Shooting Method for Boundary-value Problems
Secant Method
We will use the secant method for fining this root:
– Suppose we are trying to find a root of a real-valued function of a
real variable err(s)
– Suppose s1 and s2 are two initial approximations of the root
err(s)
s2
s1
30
The Shooting Method for Boundary-value Problems
Secant Method
We can find a better approximation of the root by finding
the interpolating straight line that passes through these
points
err(s)
s2
s1
31
The Shooting Method for Boundary-value Problems
Secant Method
The formula for this new point is
s3
s1 err s2 s2 err s1
err s2 err s1
err(s)
s3
s2
s1
32
The Shooting Method for Boundary-value Problems
Secant Method
In the first case, we considered linear ODEs
– Essentially, what we are doing here is asking:
Given these two approximations,
what would our next approximation be if the ODE was linear?
err(s)
s3
s2
s1
33
The Shooting Method for Boundary-value Problems
Secant Method
Now, suppose we have s2 and s3, the next step is to use
these approximations to find the next approximation, s4,
and so on...
s2 err s3 s3 err s2
s4
err s3 err s2
err(s)
s3
s2
s1
34
The Shooting Method for Boundary-value Problems
Secant Method
Thus, we will continue to iterate, using the secant
method at each step...
With any iterative numerical method, we must know
under what conditions we will:
– Halt with success, and
– Indicate a failure to find a solution
After all, not all iterative numerical methods converge...
35
The Shooting Method for Boundary-value Problems
Secant Method
For the secant method, we must have two
approximations, s1 and s2
First, if |err(s1)| < |err(s2)|, we will swap s1 and s2
– We’re assuming that s2 is more accurate
36
The Shooting Method for Boundary-value Problems
Secant Method
We will iterate at most Nmax times:
– With each iteration, we will approximate a new point s
– If |s2 – s| < estep and |err(s)| < eabs, we will assume we are finished
and we will return the value s (shooting, however, will take one
more step)
– Otherwise, we will set s1 = s2 and s2 = s
If we have iterated Nmax times and not found a solution,
we will throw an exception with an appropriate message
37
The Shooting Method for Boundary-value Problems
The Shooting Method
Normally, the secant method simply returns the slope
Your function, shooting, however, will have to return
the x- and u-values corresponding to that optimal slope
– Thus, your last steps before you successfully return will be:
[x_out, u_out] = dp45( f, x_rng, [u_bndry(1), s]', h, eps_abs );
return;
38
The Shooting Method for Boundary-value Problems
The Shooting Method
The arguments of
function [x_out, u_out] = shooting( s1, s2, f, x_rng, u_bndry, ...
h, eps_abs, eps_step, N_max )
are as follows:
s1 and s2 are the two approximations of the slopes
f is a function handle for the differential equation: u(2)(x) = f(x, u(x), u(1)(x))
[a, b] is a row vector defining the range on which we are approximating the
boundary-value problem
[ua, ub] is a row vector defining the boundary conditions:
u(a) = ua and u(b) = ub
h is the initial step size for the function dp45
eabs is the parameter passed to dp45 and is also the parameter
used by the secant method
estep is the parameter used by the secant method for the step size
Nmax is the parameter used by the secant method to define the
maximum number of iterations
39
The Shooting Method for Boundary-value Problems
The Shooting Method
Question: what do we use as initial conditions?
Answer: as an engineer, you will understand your
problem; you should know the expected behaviour
around the point x = a
– In these laboratories, you will be given the initial points
– In reality, you will understand what they should be when you get
there
40
The Shooting Method for Boundary-value Problems
The Shooting Method
Consider the following non-linear boundary-value
problem: u 2 x 4u 1 x u x 2 x u x 2 sin x
u 2 1.5
u 3 2.5
The corresponding function is
function [dw] = f6c( x, w )
dw = [w(2);
sin(x) - 4*w(2)*w(1) + 2*x*w(1)^2];
end
41
The Shooting Method for Boundary-value Problems
The Shooting Method
When I run the function
[x6c, u6c] = shooting( -3, -3.1, @f6c, [2, 3], [1.5, 2.5]', ...
0.01, 1e-6, 1e-6, 20 );
I get a solution after four iterations where the
approximations of the initial slopes are:
–3.326745004558498
–3.323136496135223
–3.323176635129875
–3.323176642445732
These last two slopes are sufficiently close enough and
the u6c(1, end) = 2.499999999999991 close enough
to 2.5
42
The Shooting Method for Boundary-value Problems
The Shooting Method
We can look at the plot and the result:
plot( xs, us(1,:) )
us(1,end)
ans =
2.499999999999991
length( xs )
ans =
36
43
The Shooting Method for Boundary-value Problems
The Shooting Method
You might get slightly different values depending on your
implementation of the secant method; however, the final
result should be
reasonably close
44
The Shooting Method for Boundary-value Problems
45
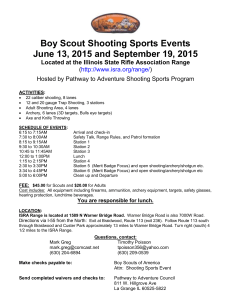
The Shooting Method
Plotting approximations with the various slopes:
slopes = [-3 -3.1 -3.326745004558498 -3.323136496135223 ...
-3.323176635129875 -3.323176642445732];
for s = slopes
[x6s, u6s] = dp45( @f6c, [2, 3], [1.5, s]', 0.01, 1e-6 );
plot( x6s, u6s(1,:) )
u6s(1,end)
end
s1 = 3
s2 = 3.1
All others...
The Shooting Method for Boundary-value Problems
The Shooting Method
If you plot the relative errors of the approximation of
u6s(1,end) as an approximation of ub = 2.5, we observe
the fast (i.e., O(hf)) convergence of the secant method
s
u6s(1,end)
Absolute
Error
–3
2.668638013935938 1.686 × 10–1
–3.1
2.617026509067240 1.170 × 10–1
–3.326745004558498
2.498107476136670
1.893 × 10–3
–3.323136496135223
2.500021288156047
2.129 × 10–5
–3.323176635129875
2.500000003879338
3.879 × 10–9
–3.323176642445732
2.499999999999991
7.105 × 10–15
46
The Shooting Method for Boundary-value Problems
Hints
You will work with various values of s and err(s)
– Instead of continually recalculating value err(s), just calculate
err1 = err_shot( s1 );
err2 = err_shot( s2 );
and when you calculate a new value of s, just use a simpler
expression with the variables s1, s2, err1 and err2 and then
immediately calculate
errs = err( s );
– When you update s1 and s2, update err1 and err2
47
The Shooting Method for Boundary-value Problems
Summary
We have looked at using the function dp45 to
approximate a boundary-value problem
– The shooting method converts a BVP into an IVP
– For linear IVPs, we use the ODE and the homogeneous ODE
and find a linear combination of the two solutions
– For non-linear IVPs, we use dp45 and the secant method to
guide us to an approximation
48
The Shooting Method for Boundary-value Problems
References
[1]
Glyn James, Modern Engineering Mathematics, 4th Ed., Prentice Hall,
2007.
[2]
Glyn James, Advanced Modern Engineering Mathematics, 4th Ed.,
Prentice Hall, 2011.
[3]
John H. Mathews and Kurtis D. Fink, Numerical Methods using Matlab, 4th
Ed., Prentice Hall, 2004, pp. 529-534.
[4]
Shooting Method, http://en.wikipedia.org/wiki/Shooting_method.
49