DCM for fMRI
advertisement

Methods for Dummies 2010
Dynamic Causal Modelling for fMRI
Justin Grace
Marie-Hélène Boudrias
DCM Motivation
Dynamic Causal Modelling (DCM) was born out of a simple
problem:
• Cognitive neuroscientists want to talk about activation at the
level of neuronal systems in order to hypothesize about
cognitive processes
• Imaging techniques do not generate data at this level, but give
output relating to non-linear correlates, such as haemodynamics
(BOLD signal) in the case of fMRI
• Moreover, it would be useful to be able to talk about causality in
neuronal populations, since we know that signals propagate in a
wave-like manner from some input through a system
• DCM attempts to tackle these problems
DCM History
• Introduced in 2002 for fMRI data (Friston, 2002)
• DCM is a generic approach for inferring hidden
(unobserved) neuronal states from measured brain
activity.
• The mathematical basis and implementation of DCM for
fMRI have since been refined and extended repeatedly.
• DCMs have also been implemented for a range of
measurement techniques other than fMRI, including EEG,
MEG (to be presented next week), and LFPs obtained
from invasive recordings in humans or animals.
Recap on Connectivity
1. Structural
connectivity – the
physical structure
of the brain
2. Functional
connectivity – the
likelihood that 2
neuronal
populations share
associated activity
Structural, functional, and effective connectivity matrices.
•Binary or Non-binary – reflecting proximity between
elements (presence or magnitude respectively)
•Symmetrical or Non-symmetrical – reflecting direction
independence, or directional effects respectively
3. Effective
connectivity – a
union between
structural and
functional
connectivity.
=> DCM
Overview
• Dynamic causal models (DCMs)
– Basic idea
– Neural level
– haemodynamic level
– Priors & Parameter estimation
• Rules of good practice of DCM with fMRI data
Basic Idea
• DCM allows us to model interactions among neuronal populations at a
cortical level using approximations of neural activity. Today, since we are
discussing DCM using fMRI, our source data reflects the haemodynamic time
series.
• Using these models we can begin to make inferences about the coupling
among brain areas, & how that coupling can be manipulated by changes to the
experimental context.
• This approach requires several components that build on prior knowledge
about that brain & neural systems established by previous research…
Components of DCM
Neural
• Realistic model of neuronal ROIs
• Tests specific hypotheses
Neural
• Mechanism for describing how
ROIs interact with (i) stimulus
function (ii) each other over time
BOLD
Model
selection
• Forward haemodynamic
response function for mapping
the neuronal model to the BOLD
model
• Method for selecting the most
appropriate BOLD model given
the real BOLD data
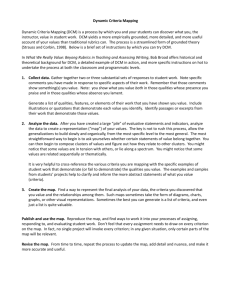
The aim of DCM
Functional integration and the modulation of specific pathways
Based on prior data
& concrete hypotheses
A Matrix
Stimulus-free - u(t)
{e.g. cognitive set/time}
B Matrix
BA39
Perturbing inputs
Stimuli-bound u1(t)
{e.g. visual words}
y
STG
C Matrix
V4
y
BA37
y
V1
y
y
Basics of Dynamic Causal Modelling
DCM allows us to look at how areas within a network interact:
Investigate functional integration & modulation of specific cortical
pathways
– Temporal dependency of activity within and between areas (causality)
Temporal dependence and causal relations
Seed voxel approach, PPI etc.
T0
A
B
Dynamic Causal Models
T0
T1
T1
T2
T2
….
….
A
timeseries (neuronal activity)
B
What is a system?
Input u(t)
System =
a set of elements which
interact in a spatially and
temporally specific fashion
State changes of a system are
dependent on:
– the current state
– external inputs
– its connectivity
– time constants & delays
connectivity parameters
system
state z(t)
dz
F ( z, u, )
dt
Linear Dynamic Model
INPUT U1
INPUT U2
C11
C22
A21
A11
X1
A12
X2
X1= A11X1 + A21X2 + C11U1
A22
X2= A22X2 + A12X1 + C22U2
The Linear Approximation
fL(x,u)=Ax + Cu
x
1 A11 A12 x1 C11 0 U 1
U 2
A
21
A
22
x
2
0
C
22
x2
Intrinsic Connectivity
Extrinsic (input) Connectivity
INPUT U1
INPUT U2
C11
B221
C22
A21
A11
X1
A12
X2
A22
Bi-Linear Dynamic Model (DCM)
INPUT U1
INPUT U2
C11
C22
B221
A21
X1
A11
X2
A12
2
X1= A11X1 + (A21+ B 12U1(t))X + C11U1
A22
X2= A22X2 + A12X1 + C22U2
The Bilinear Approximation
j
fB(x,u)=(A+jUjB )x + Cu
x
1 A11 A12 0 B 2 12 x1 C11 0 U 1
U 2
U 2
A
21
A
22
x
2
0
C
22
0
0
2
x
Intrinsic
Connectivity
Extrinsic (input)
INDUCED CONNECTIVITY
Connectivity
Neurodynamics: 2 nodes with input
u1
u1
u2
z1
z1
a21
z2
z
2
z1 1 0 z1 c
z s a 1 z 0u1
2 21
2
a21 0
activity in z2 is coupled to z1 via coefficient a21
Neurodynamics: positive modulation
u1
u2
z1
u1
u2
z1
z
2
z2
index, not squared
z1 1 0 z1
0 0 z1 c
z s a 1 z u2 b 2 0 z 0u1
2 21
2
21 2
b212 0
modulatory input u2 activity through the coupling a21
Neurodynamics: reciprocal connections
u1
u2
u1
u2
z1
z1
z
z2
2
z1 1 a12 z1
0 0 z1 c
z s a 1 z u2 b 2 0 z 0u1
2 21
2
21 2
reciprocal
connection
2
a12 , a21, b21 0 disclosed by u2
Neuronal level summary
This completes the neuronal model – hopefully you now have some
understanding as to how the neuronal model generates output relating to
neuronal activity.
we have explained how any 2 elements of interest interact with each
other and the stimulus input;
How elements can be combined to talk about a neuronal system state;
And how we can identify change in this system over time;
In order to discuss intrinsic and induced connectivity with respect to
extrinsic stimulus effects.
Basics of Dynamic Causal Modelling
DCM allows us to look at how areas within a network interact:
Investigate functional integration & modulation of specific cortical
pathways
– Temporal dependency of activity within and between areas (causality)
– Separate neuronal activity from observed BOLD responses
Basics of DCM:
Neuronal and BOLD level
• Cognitive system is modelled at its underlying
neuronal level (not directly accessible for
fMRI).
• The modelled neuronal dynamics (x) are
transformed into area-specific BOLD signals
(y) by a haemodynamic model (λ).
The aim of DCM is to estimate
parameters at the neuronal level such
that the modelled and measured
BOLD signals are maximally* similar.
x
λ
y
The haemodynamic model
• 6 haemodynamic
parameters:
t
activity
x(t )
{ , , , , , }
h
important for model fitting,
but of no interest for
statistical inference
stimulus functions
u
neural state equation
vasodilatory signal
s x s γ( f 1)
f
s
s
haemodynamic
state equations
flow induction (rCBF)
f s
f
• Computed separately for
each area regionspecific HRFs!
changes in volume
τv f v
1 /α
v
changes in dHb
τq f E ( f,E0 ) qE0 v1/α q/v
q
v
BOLD signal
Friston et al. 2000, NeuroImage
Stephan et al. 2007, NeuroImage
y (t ) v, q
Estimated BOLD
response
Haemodynamics: reciprocal connections
u1
u2
z1
h1
4
BOLD
2
(without noise)
0
0
20
40
60
0
20
40
seconds
60
4
blue:
neuronal
activity
red:
BOLD
response
z
2
h2
BOLD
2
(without noise)
0
h(u,θ) represents the BOLD response (balloon model) to input
Haemodynamics: reciprocal connections
u1
u2
z1
y1
4
BOLD
2
with
Noise added 0
0
20
40
60
0
20
40
seconds
60
4
blue:
neuronal
activity
red:
BOLD
response
z
2
y2
BOLD
2
with
0
Noise added
y h(u, ) e
y represents simulated observation of BOLD response, i.e. includes noise
So we now have models of BOLD signal output based on our predicted
neuronal model.
Marie-Hélène will describe the process of setting these models with
appropriate priors and using parameter estimation to identify the most
appropriate model.
Overview
• Dynamic causal models (DCMs)
– Basic idea
– Neural level
– Hemodynamic level
– Parameter estimation, priors & inference
• Rules of good practice of DCM with fMRI data
DCM roadmap
Dynamic Causal Modelling of fMRI
Neuronal
dynamics
Haemodynamics
State space
Model
Posterior densities
of parameters
Priors
Bayesian Model
inversion
fMRI data
Model
comparison
stimulus function u
Overview:
parameter estimation
•
neuronal state
equation
z ( A u j B j ) z Cu
Specify model (neuronal and
haemodynamic level).
activity - dependent vasodilatory signal
•
s z s γ( f 1)
Bayesian parameter
estimation to minimise
difference between data and
model.
s
s
f
flow - induction (rCBF)
parameters
f s
h { , , , , }
hemodynamic
state equations
f
n { A, B1...B m , C}
{ h , n }
•
Result:
Gaussian a posteriori coupling
parameter distributions,
characterised by mean ηθ|y
and covariance Cθ|y.
ηθ|y
changes in volume
τv f v1/α
v
v
changes in dHb
τq f E ( f, ) q v1/α q/v
q
h( x, u, )
modeled
BOLD response
Measured vs Modelled BOLD signal
The aim of DCM is to estimate
- neural parameters {A, B, C}
- hemodynamic parameters
such that the modelled and measured BOLD signals are maximally similar.
Estimation: Bayesian framework
h { , , , , }
{ A, B ...B , C}
n
1
m
Models of
Constraints on
•Combined haemodynamics and
neural parameter set
•Haemodynamic parameters
•Connections (coupling parameters)
likelihood term
p( y | )
posterior
p ( )
prior
p( | y ) p( y | ) p( )
Bayesian estimation
The posterior
probability of the
parameters given the
data is an optimal
combination of prior
knowledge and new
data, weighted by
their relative
precision.
Interpretation of parameters
• The model parameters are distributions that have a mean ηθ|y and
covariance Cθ|y .
• Quantify the probability that a parameter (ηθ|y ) is above a chosen
threshold γ:
ηθ|y
• By default, γ is chosen as zero
("does this coupling parameter exist?").
Bayesian Model Selection (BMS)
• Model evidence involves integrating out the dependency of the
model parameters:
p( y | m) p( y | , m) p( | m) d
• BMS is an established procedure in statistics that rests on
computing the model evidence p ( y | m)
i.e., the probability of the data y, given some model m.
• The model evidence, which can be considered the “holy grail” of
model comparison, quantifies the properties of a good model.
• It explains the data as accurately as possible and, at the same
time, has minimal complexity.
Model comparison
Given competing
hypotheses on structure &
functional mechanisms of a
system, which model is the
best?
Which model represents the
best balance between model
fit and model complexity?
For which model m does
p(y|m) become maximal?
Bayesian Model Selection (BMS)
•
In BMS, models are usually compared via their Bayes factor,
i.e., the ratio of their respective evidences:
p( y | m1 )
B12
p( y | m2 )
•
•
The “Bayes factor” is a summary of the evidence in favour of one model as
opposed to another.
B12
p(m1|y)
Evidence
1 to 3
50-75%
weak
3 to 20
75-95%
positive
20 to 150
95-99%
strong
150
99%
Very strong
i.e. Given candidate models m1 and m2, a Bayes factor of 20 corresponds
to a belief of 95% in the statement ‘m1 is better than m2’.
Overview
• Dynamic causal models (DCMs)
– Basic idea
– Neural level
– Hemodynamic level
– Parameter estimation, priors & inference
• Rules of good practice of DCM with fMRI data
Rules of good practice
• DCM is dependent on experimental perturbations
– Experimental conditions enter the model as inputs that either drive
the local responses or change connections strengths.
– If there is no evidence for an experimental effect (no activation
detected by a GLM) → inclusion of this region in a DCM is not
meaningful.
•
Use the same optimization strategies for design and data acquisition that apply
to conventional GLM of brain activity:
– preferably multi-factorial (e.g. 2 x 2)
– one factor that varies the driving (sensory) input
– one factor that varies the contextual input
Define the relevant model space
• Define sets of models that are plausible, given prior knowledge about
the system, this could be e.g.:
•
•
derived from principled considerations
informed by previous empirical studies using neuroimaging, electrophysiology,
TMS, etc. in humans or animals.
• Use anatomical information and computational models to refine your
DCMs.
• The definition of the relevant model space should be as transparent
and systematic as possible, and it should be described clearly in any
article.
Motivate model space carefully
• Models are never true; by construction, they are meant to be helpful
caricatures of complex phenomena, such that mechanisms underlying
these phenomena can be tested.
• The purpose of model selection is to determine which model, from a set
of plausible alternatives, is most useful i.e., represents the best balance
between accuracy and complexity.
• The critical question in practice is how many plausible model
alternatives exist?
–
–
For small systems (i.e., networks with a small number of nodes), it is possible to investigate all
possible connectivity architectures.
With increasing number of regions and inputs, evaluating all possible models becomes practically
impossible very rapidly.
What you can not do with BMS
• Model evidence is defined with respect to one particular data set. This
means that BMS cannot be applied to models that are fitted to different
data.
• Specifically, in DCM for fMRI, one cannot compare models with
different numbers of regions, because changing the regions changes
the data.
• Maximum of 8 regions with SPM8.
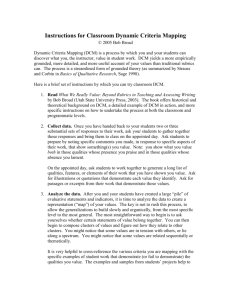
Fig. 1. This schematic summarizes the typical sequence of analysis in DCM, depending on the question of interest. Abbreviations:
FFX=fixed effects, RFX=random effects, BMS=Bayesian model selection, BPA=Bayesian parameter averaging, BMA=Bayesian
model averaging, ANOVA=analysis of variance.
10 Simple Rules for DCM (2010). Stephan et al. NeuroImage 52.
BA39
Perturbing inputs
C matrix
y
STG
V4
y
BA37
y
V1
y
y
Fig. 1. This schematic summarizes the typical sequence of analysis in DCM, depending on the question of interest. Abbreviations:
FFX=fixed effects, RFX=random effects, BMS=Bayesian model selection, BPA=Bayesian parameter averaging, BMA=Bayesian
model averaging, ANOVA=analysis of variance.
10 Simple Rules for DCM (2010). Stephan et al. NeuroImage 52.
Contextual inputs
B matrix
BA39
Perturbing inputs
C matrix
y
STG
V4
y
BA37
y
V1
y
y
Practical steps of DCM
Design matrix
1) Standard Analysis of fMRI Data
SPMs
2) Statistical Parametric Maps
- Extract times series from chosen areas
3) Construction of a Connectivity Model
- Add a forward model of how neuronal activity
causes the signals you observe (e.g. BOLD)
(Neural and hemodynanics models)
4) Evaluation of the Connectivity Model
- Estimation of the parameters in your model
(effective connectivity), given your observed data
5) BMS, BMA or BPA
PMd
PMd
PMv
SMA
M1
SMA
PMv
M1
Left
PMv
SMA
Mod_43
Specify
intrinsic
connecti
ons
to
Effects
of
to
Effects
of
to
M1_L
-1.00
-0.01
0.23
0.13
0.36
0.02
0.13
0.22
M1_R
0.00
-1.00
-0.01
0.00
-0.01
0.01
-0.01
0.00
from
SMA_L SMA_R PMd_L
0.01
0.01
0.00
-0.07
-0.04
-0.09
-1.00
0.04
0.08
0.03
-1.00
0.04
0.07
0.05
-1.00
-0.07
-0.04
-0.11
0.02
0.02
0.02
0.02
0.02
0.01
PMd_R
0.01
0.02
0.00
0.01
0.00
-1.00
0.00
0.01
PMv_L
0.02
-0.04
0.05
0.02
0.06
-0.04
-1.00
0.02
PMv_R
0.02
-0.05
0.07
0.04
0.09
-0.06
0.03
-1.00
M1_L
0.01
0.00
0.00
0.00
0.03
0.00
-0.03
0.00
M1_R
0.00
0.00
0.00
0.00
0.00
0.00
0.00
0.00
from
SMA_L SMA_R PMd_L
0.00
0.00
0.00
0.00
0.00
0.00
0.00
0.00
0.00
0.00
0.00
0.00
0.00
0.00
0.00
0.00
0.00
0.00
0.00
0.00
0.00
0.00
0.00
0.00
PMd_R
0.00
0.00
0.00
0.00
0.00
0.00
0.00
0.00
PMv_L
0.00
0.00
0.00
0.00
0.00
0.00
0.00
0.00
PMv_R
0.00
0.00
0.00
0.00
0.00
0.00
0.00
0.00
GripxFor
ce^1
M1_L
M1_R
SMA_L
SMA_R
PMd_L
PMd_R
PMv_L
PMv_R
M1
VH
Age: 19
Model:
M1_L
M1_R
SMA_L
SMA_R
PMd_L
PMd_R
PMv_L
PMv_R
PMv
SMA
M1
SUBJECT:
Right
PMd
PMd
Grip
M1_L
M1_R
SMA_L
SMA_R
PMd_L
PMd_R
PMv_L
PMv_R
1.643
0.000
-0.093
0.000
-0.302
0.000
0.066
0.000
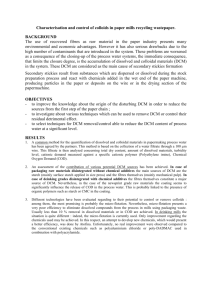
C Matrix = Entrance of the
driving (sensory) input in the
network.
A Matrix = rate constant in 1/s or Hz
- Coupling represents the connection
strength describing how fast and strong a
response occur in the target region.
- If M1_LPMd_L is 0.36 s-1 this means
that, per unit time, the increase in activity
in PMd_L corresponds to 36% of the
activity in M1_L.
ηθ|y0
B Matrix = Used to calculate the % of
change of connection strength in the target
region by the factor that varies the contextual
input.
By 0.03
8%
Ay 0.36
So, DCM….
•
enables one to infer hidden neuronal processes from fMRI data
•
tries to model the same phenomena as a GLM
– explaining experimentally controlled variance in local responses
– based on connectivity and its modulation
•
allows one to test mechanistic hypotheses about observed effects
•
is informed by anatomical and physiological principles.
•
uses a Bayesian framework to estimate model parameters
•
is a generic approach to modelling experimentally perturbed dynamic
systems.
– provides an observation model for neuroimaging data, e.g. fMRI, M/EEG
Some useful references
• The first DCM paper: Dynamic Causal Modelling (2003). Friston et al. NeuroImage
19:1273-1302.
• Physiological validation of DCM for fMRI: Identifying neural drivers with functional MRI:
an electrophysiological validation (2008). David et al. PLoS Biol. 6 2683–2697
• Hemodynamic model: Comparing hemodynamic models with DCM (2007). Stephan et
al. NeuroImage 38:387-401
• Nonlinear DCMs:Nonlinear Dynamic Causal Models for FMRI (2008). Stephan et al.
NeuroImage 42:649-662
• Two-state model: Dynamic causal modelling for fMRI: A two-state model (2008).
Marreiros et al. NeuroImage 39:269-278
• Group Bayesian model comparison: Bayesian model selection for group studies (2009).
Stephan et al. NeuroImage 46:1004-10174
• 10 Simple Rules for DCM (2010). Stephan et al. NeuroImage 52.
• Dynamic Causal Modelling: a critical review of the biophysical and statistical
foundations. Daunizeau et al. Neuroimage (2010), in press
• SPM Manual, SMP courses slides, last years presentations.
• THANKS Andre Marreiros!