The Engine Control Computer
advertisement

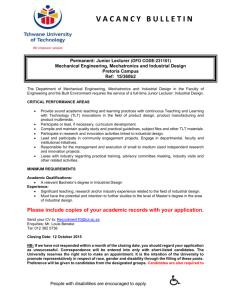
Exploring Engineering Chapter 10 Control Systems and Mechatronics Topics to be Covered Block Diagrams Transfer Control functions systems Steady State Transient models Mechatronics Block diagrams Mathematically mimic a small piece of a physical process a stereo amplifier … see: www.engr.uky.edu/.../index_files/image003.jpg E.g., Block diagrams Notice the blocks show the connectivity and gross function. They do not show the actual wires, printed circuits etc that make a stereo receiver. The blocks can be broken down much further in increasing detail of what is in a block To be really useful, the blocks can be given a simple mathematical description that emulates just what they do Transfer (Response) Function Relates what signal goes in (e.g., volts. pressure, light source) to what goes out (e.g., amperes, mechanism movements, volts etc.) Simplest Input = 1 (volts, amps, temperature, etc. transfer function: Transfer function: Output = Gain x input Gain = 5 Simple gain transfer block Output = 5 (volts, amps, temperature, etc. Transfer (Response) Function Cruise control – a string of blocks representing the physical functions Transfer (Response) Function If the transfer functions to first power (a.k.a. “linear”) you can multiply them together Open and closed loop control For your first cruise control, just put a brick on the accelerator and sit back … Desired Speed, So Actual Speed, S Brick controller Fuel & air Engine system Surroundings Power • If surroundings are head wind vs. tailwind, hills vs. flat, etc., will actual speed equal desired speed? Open and closed loop control Open loop controls do not work well Closed loop or feedback control is near universal Feedback is made possible by a “comparator” The desired controlled variable is called the “set point” Desired Speed, So + Difference or error signal S0 -S Actual Speed, S Feedback control Comparator Surroundings Mathematics of Feedback Control Collapse all the blocks; the gain Gp is the product of all the linear gains of the blocks The control is proportional is the output is a simple multiple of the input. S0 - S S0 + - Proportional Controller; gain Gp S Act G p S 0 S Act SAct S Act G p S 0 S Act Mathematics of Control Blocks S Act G p S0 1 G so that the steady state error is p S 0 - S Act S0 100 & the % error 1 G p 1 G p • Ops! Steady state error Gp % error • The moral is to watch your gains! 1 50 • So is an infinite gain the solution? 10 9.1 100 0.99 Transient Behavior If you have a steady state feedback loop given by one or more transfer functions, that solution is a snapshot in time If you change the set point to another value, that gives another snapshot of the state of the system What happens during the transient interval between steady states? Can your model accommodate transients? Transient Behavior Your model needs transient behavior built in – which so far the proportional controller does not have At a minimum for a cruise control you need a) b) c) The inertia of the car (it will not accelerate instantaneously) The wind resistance that varies as S3 and keeps the car from speeding to speed Perhaps an allowance for hills? Transient Behavior Excluding hills,a simple model would include at least these blocks Transient Behavior Without doing the arithmetic, results of this model are as shown: a) low gain, b) medium gain and c) high gain Transient Behavior c) Notice the sensitivity to the overall gain: Too low and the transient is sluggish Medium and it has some overshoot but settles down Oscillatory behavior Moral is watch your gains! a) b) High and low gains have their drawbacks! Mechatronics Mechatronics is a synthesis of mechanics, electronics, control engineering and computers http://gizmodo.com/ 5342497/self+balan cing-enicycle-islike-a-segway-forthe-circus Mechatronics Instead of first doing a mechanical design, followed by an electronic design, followed by a control systems design they are all done coequally Stepper motors are often mechatronic components Windings and poles 1 3 2 Rotor 3 2 1 Principle of a stepper motor Figure 12: Principle of a stepper motor Mechatronics Can use a variant on a stepper motor to replace two separate systems, a throttle and cruise control on a car here’s how its done: http://video_demos.colostate.edu/mechatr onics/index.html Go to: stepper motor PIC-based position and speed controller Mechatronics Such technology will become common place on cars as part of “fly-by-wire” methodology (used on most new passenger aircraft) Summary Control depends on some simple abstractions: Block diagrams that simulate an element in the control linkages (whether mechanical or otherwise) Simple mathematical representation of the block’s function A comparator to generate an error signal Feedback to correct the instantaneous value of the controlled variable High proportional gain to reduce steady state error and low gain to reduce unsteady transient behavior. Mechatronics is an integrated method of design including mechanical, electronic and control elements.