Polar coordinate system
advertisement

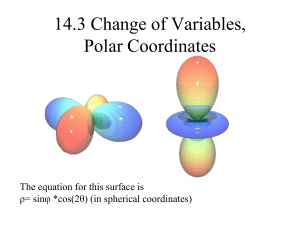
Polar Coordinate System CALCULUS-III Dr. Farhana Shaheen Polar Coordinate System In mathematics, the polar coordinate system is a two-dimensional coordinate system in which each point on a plane is determined by a distance from a fixed point and an angle from a fixed direction. The fixed point (analogous to the origin of a Cartesian system) is called the pole, and the ray from the pole with the fixed direction is the polar axis. The distance from the pole is called the radial coordinate or radius, and the angle is the angular coordinate, polar angle, or azimuth. 2-D (Plane) Polar Coordinates Thus the 2-D polar coordinate system involves the distance from the origin and an azimuth angle. Figure 1 shows the 2-D polar coordinate system, where r is the distance from the origin to point P, and θ is the azimuth angle measured from the polar axis in the counterclockwise direction. Thus, the position of point P is described as (r, θ ). Here r & θ are the 2-D polar coordinates. Figure: 1 Any point P in the plane has its position in the polar coordinate system determined by (r, θ). Some Points With Their Polar Coordinates Rectangular and Polar Coordinates Rectangular coordinates and polar coordinates are two different ways of using two numbers to locate a point on a plane. Rectangular coordinates are in the form (x, y), where 'x' and 'y' are the horizontal and vertical distances from the origin. A point in Cartesian Plane Polar coordinates coordinates are in the form (r, θ), where 'r' is the distance from the origin to the point, and θ is the angle measured from the positive 'x' axis to the point: Polar Relation between Polar and Rectangular Coordinates To convert between polar and rectangular coordinates, we make a right triangle to the point (x, y), like this: The relationship between Polar and Cartesian coordinates x = r Cos θ, y = r Sin θ 1. Polar to Rectangular From the diagram above, these formulas convert polar coordinates to rectangular coordinates: x = r cos θ, y = r sin θ. So the polar point (r, θ) can be converted to rectangular coordinates as: (x, y) = ( r cos θ, r sin θ) Example: A point has polar coordinates: (5, 30º). Convert to rectangular coordinates. Solution: (x, y) = (5cos30º, 5sin30º) = (4.3301, 2.5) Converting between polar and Cartesian coordinates The two polar coordinates r and θ can be converted to the Cartesian coordinates x and y by using the trigonometric functions sine and cosine: while the two Cartesian coordinates x and y can be converted to polar coordinate r & θ , using the Pythagorean theorem) as follows: 2. Rectangular to Polar From the diagram below, these formulas convert rectangular coordinates to polar coordinates: By the rule of Pythagoras: r2 = x2 + y2. Also, Tan θ = y/x implies θ = tan-1( y/x ) So the rectangular point (x,y) can be converted to polar coordinates like this: ( r,θ) = ( r, tan-1( y/x ) ) To plot a point in Polar Coordinate We first mark the angles, in the anticlockwise direction from the polar axis. Negative Distance OQ is extension of OP With coordinates P(r,θ) and Q(-r, θ+π) For any real r > 0 and for all integers k: A planimeter, which mechanically computes polar integrals A planimeter is a measuring instrument used to determine the area of an arbitrary two-dimensional shape. Cartesian equations of Parabolas: the original graph y=x2 up 2 units. The resultant graph is y= x2+2 Move Polar and Cartesian equations of a Parabola Polar and Cartesian equations of a Parabola Example: Find the polar equation of each of the following curves with the given Cartesian equation: a) B) x=c x2 y + y3 = – 4 Solution To convert Cartesian equation into polar equation Example: Polar Equations of Straight Lines θ = α, for any fixed angle α. Exp: θ = π/4 Straight Lines Standard equation of straight line in Cartesian coordinates: y = mx + c Polar Equations of Straight Lines r Cos θ = k; or r = k Sec θ. It is a vertical line through k. It is equivalent to the Cartesian equation x = k. r Sin θ = k; or r = k Csc θ. It is a horizontal line through k. It is equivalent to the Cartesian equation y = k. Polar equation of a curve The equation defining an algebraic curve expressed in polar coordinates is known as a polar equation. In many cases, such an equation can simply be specified by defining r as a function of θ. The resulting curve then consists of points of the form (r(θ), θ) and can be regarded as the graph of the polar function r. Different forms of symmetry can be deduced from the equation of a polar function r. If r(−θ) = r(θ) the curve will be symmetrical about the horizontal (0°/180°) ray, if r(π − θ) = r(θ) it will be symmetric about the vertical (90°/270°) ray, and if r(θ − α°) = r(θ) it will be rotationally symmetric α° counterclockwise about the pole. Because of the circular nature of the polar coordinate system, many curves can be described by a rather simple polar equation, whereas their Cartesian form is much more intricate. Among the best known of these curves are the polar rose, Archimedean spiral, lemniscates, limaçon, and cardioid. Curve shapes given by polar equations There are many curve shapes given by polar equations. Some of these are circles, limacons, cardioids and rose-shaped curves. Limacon curves are in the form r= a ± b sin(θ) and r= a ± b cos(θ) where a and b are constants. Cardioid (heart-shaped) curves are special curves in the limacon family where a = b. Rose petalled curves have polar equations in the form of r= a sin(nθ) or r= a cos(nθ) for n>1. When n is an odd number, the curve has n petals but when n is even the curve has 2n petals. Polar Equations of Circles r = k : A circle of radius k centered at the origin. r = a sin θ : A circle of radius |a|, passing through the origin. If a > 0, the circle will be symmetric about the positive y-axis; if a < 0, the circle will be symmetric about the negative y-axis. r = a cos θ: A circle of radius |a|, passing through the origin. If a > 0, the circle will be symmetric about the positive x-axis; if a < 0, the circle will be symmetric about the negative x-axis. Equations of Circle A circle with equation r(θ) = 1 The general equation for a circle with a center at (r0, φ) and radius a is This can be simplified in various ways, to conform to more specific cases, such as the equation for a circle with a center at the pole and radius a. A circle with equation r(θ) = 1 Parametric Equation of a Circle For a circle with origin (h,k) and radius r: x(t) = r cos(t) + h y(t) = r sin(t) + k Graph Polar Equations Step 1 Consider r= 4 sin(θ) as an example to learn how to graph polar coordinates. Step 2 Evaluate the equation for values of (θ) between the interval of 0 and π. Let θ equal 0, π /6 , π /4, π /3, π /2, 2π /3, 3π /4, 5π /6 and π. Calculate values for r by substituting these values into the equation. Step 3 Use a graphing calculator to determine the values for r. As an example, let θ = π /6. Enter into the calculator 4 sin(π /6). The value for r is 2 and the point (r, θ) is (2, π /6). Find r for all the (θ) values in Step 2. Step 4 Plot the resulting (r, θ ) points from Step 3 which are (0,0), (2, π /6), (2.8, π /4), (3.46,π /3), (4,π /2), (3.46, 2π /3), (2.8, 3π /4), (2, 5π /6), (0, π) on graph paper and connect these points. The graph is a circle with a radius of 2 and center at (0, 2). For better precision in graphing, use polar graph paper. Simplify the Graphing of Polar Equations Look for symmetry when graphing these functions. As an example use the polar equation r=4 sinθ. You only need to find values for θ between π (Pi) because after π the values repeat since the sine function is symmetrical. Step 2 Choose the values of θ that makes r maximum, minimum or zero in the equation. In the example given above r= 4 sin (θ), when θ equals 0 the value for r is 0. So (r, θ) is (0,0). This is a point of intercept. Step 3 Find other intercept points in a similar manner. Graphing Polar Equations Example 1: Graph the polar equation given by r = 4 cos t and identify the graph. Solution We first construct a table of values using the special angles and their multiples. It is useful to first find values of t that makes r maximum, minimum or equal to zero. r is maximum and equal to 4 for t = 0. r is minimum and equal to -4 for t = π and r is equal to zero for t = π/2. Plotting of points in polar coordinates Join the points drawing a smooth curve r = 4 cos t Limacon In geometry, a limaçon, also known as a limaçon of Pascal, is defined as a roulette formed when a circle rolls around the outside of a circle of equal radius. It can also be defined as the roulette formed when a circle rolls around a circle with half its radius so that the smaller circle is inside the larger circle. Thus, they belong to the family of curves called centered trochoids; more specifically, they are epitrochoids. The cardioid is the special case in which the point generating the roulette lies on the rolling circle; the resulting curve has a cusp. Construction of a limacon Polar Equations of Limacons Equations of limacons have two general forms: r = a ± b sin θ and r = a ± b cos θ: Depending on the values of a and b, the graph will take on one of three general shapes and will either pass through the origin or not as summarized below. Equations of limacon If r = a ± b Cos θ; r = a ± b Sin θ |a| > |b| then you have a dimple; If |a| = |b| then you have a cardioid; If |a| < |b| then you have an interior lobe. Graphs of Limacons |a| >|b| |a| = |b| |a| < |b| Cardioids When |a| = |b|, the graph has a rounded \heart" shape, with the pointed (convex) indentation of the heart located at the origin. Such a graph is called a cardiod. They may be categorized as follows: r = a(1 ± sin θ) . Symmetric about the positive y-axis if `+`; symmetric about the negative y-axis if `- '. r = a(1 ± cos θ) . Symmetric about the positive x-axis if `+'; symmetric about the negative x-axis if `-'. In either case, the pointed \heart" indentation will point in the direction of the axis of symmetry. The maximum distance of the graph from the origin will be 2|a| and the point furthest away from the origin will lie on the axis of symmetry. Limacons Dimpled Limacons r=3/2+cos(t) (purple) r'=3/2-sin(t) (red) If |a| < |b| then you have an interior lobe in Limacon The family of limaçons is varied by making a range from -2 to 2, and then back to -2 again. Limacon: Pedal curve of a circle Graph for the equation r = 2 + 2 sin t (Cardiod) t = 0, r = 2 t = π/6,r = 3.0 t = π/4,r = 3.4 t = π/3,r = 3.7 t = π/2,r = 4 t = 2π/3,r = 3.7 t = 3π/4,r = 3.4 t = π,r = 2 Cardioid r=1+cos(t) Changing + b to - b has the same effect on the cardiod as with the other limacons; that is a reflection occurs. r=1+cos(t) (magenta) r=1- cos(t) (purple) If |a| = |b|, the cardioid will increase or decrease in size depending on the value of a and b r=0.5+0.5*cos(t) (black) r=2+2*cos(t) (purple) r=3+3*cos(t) (red) r=4+4*cos(t) (blue) Rose curves r = a Sin nθ; r = a Cos nθ; where n > 1. Graph has n petals if n is odd, and 2n petals if n is even. Polar rose A polar rose is a famous mathematical curve that looks like a petalled flower, and that can be expressed as a simple polar equation: r = a Sin nθ; r = a Cos nθ, for n > 1. If n is an integer, these equations will produce an npetalled rose if n is odd, or a 2n-petalled rose if n is even. If n is rational but not an integer, a rose-like shape may form but with overlapping petals. Note that these equations never define a rose with 2, 6, 10, 14, etc. petals. The variable a represents the length of the petals of the rose. A polar rose with equation r(θ) = 2 sin 4θ Graph for the equation r = 4 cos 2t t = 0, r = 4 t = π/6,r = 2 t = π/4,r = 0 t = π/2,r = -4 t = π/3,r = -2 t = 2π/3,r = -2 t = 3π/4,r = 0 t = π,r = 4 Pretty Petals Roses Consider the following polar equations r = cos (2 t) (light red) r = 3 cos (2 t) (heavy red) and their associated graphs. The number of leaves is determined by n. r = 5 cos (8 t) r = 2 cos (3 t); r = 3 cos (5 t); r = 4 cos(7 t) r = 2 cos (3 t) (blue) r = 2 sin (3 t) (purple) Examples of flowers: Three-petal flowers Four- petal flowers Why is a four-petalled flower considered lucky? A FOUR LEAF CLOVER One leaf for fame, One leaf for wealth, And one leaf for a faithful lover, And one leaf to bring glorious health There are many legends about this small plant. One is that Eve took a four-leaf clover with her when leaving the Garden of Eden. This would make it a very rare plant indeed, and very lucky. Five-petal flowers Spirals Logarithmic Spiral The logarithmic spiral is a spiral whose polar equation is given by r =aebθ, where r is the distance from the origin, θ is the angle from the polar-axis, and a and b are arbitrary constants. The logarithmic spiral is also known as the growth spiral, equiangular spiral, and spira mirabilis. Logarithmic spiral A logarithmic spiral, equiangular spiral or growth spiral is a special kind of spiral curve which often appears in nature. The logarithmic spiral was first described by Descartes and later extensively investigated by Jakob Bernoulli, who called it Spira mirabilis, "the marvelous spiral". Logarithmic Spiral r = a bθ The distance between successive coils of a logarithmic spiral is not constant as with the spirals of Archimedes. Spirals of Archimedes Polar graphs of the form r = aθ + b where a is positive and b is nonnegative are called Spirals of Archimedes. They have the appearance of a coil of rope or hose with a constant distance between successive coils. Archimedean spiral The Archimedean spiral (also known as the arithmetic spiral) is a spiral named after the 3rd century BC Greek mathematician Archimedes. It is the locus of points corresponding to the locations over time of a point moving away from a fixed point with a constant speed along a line which rotates with constant angular velocity. Equivalently, in polar coordinates (r, θ) it can be described by the equation r = aθ + b with real numbers a and b. Changing the parameter a will turn the spiral, while b controls the distance between successive turnings. The Archimedean spiral The logarithmic spiral can be distinguished from the Archimedean spiral by the fact that the distances between the turnings of a logarithmic spiral increase in geometric progression, while in an Archimedean spiral these distances are constant. Hyperbolic spiral Any polar equation that has the form r = a/θ where a>0 is a hyperbolic spiral. Cornu Spiral in Complex Plane A plot in the complex plane of the points B(t)==S(t)+iC(t) Fermat's Spiral Fermat's spiral, also known as the parabolic spiral, is an Archimedean spiral having polar equation r2 = a2θ Spirals in Nature In nature, you may have noticed that shells of some sea creatures are shaped like logarithmic spirals particularly the nautilus. Spirals in Nature Spiral galaxies Spiral galaxies Galaxies, by contrast, rotate either direction depending on your point of view -- there is no known up or down in the universe. (A study in the late 1990s suggested the universe was directional, but the work was soon refuted.) Why do galaxies rotate in the first place? The answer goes back to the formation of the universe, when matter raced outward in all directions. Clumps eventually formed, and these clumps began to interact gravitationally. Once stuff moved off a straight course and began to curve toward something else, angular momentum, or spin, set in. The laws of physics say angular momentum must be conserved. Astronomers don't know exactly how a galaxy like the Milky Way gets its spiral arms. But the basics are understood. Gravitational disturbances called density waves, rippling slowly through a galaxy, are thought to cause it to wind up and generate the spiral appearance. The spiral arms of a galaxy are places where gas piles up at the wave crests. The material does not move with the spirals, but rather is caught up in them. The Whirlpool Galaxy The arms of spiral galaxies often have the shape of a logarithmic spiral, e.g. Whirlpool Galaxy The spirals show the places where newly born stars reside, while older stars reside in the core of this spiral galaxy depicting that the arms are star forming factories. When you look at the upper right portion of above picture, you notice that another galaxy called NGC 5195 appears to be tugging the arms of whirlpool galaxy but latest images have shown that it is passing behind this galaxy. Curves that are close to being logarithmic spirals In several natural phenomena one may find curves that are close to being logarithmic spirals. Here follows some examples and reasons: The approach of a hawk to its prey. Their sharpest view is at an angle to their direction of flight; this angle is the same as the spiral's pitch.[4] The approach of an insect to a light source. They are used to having the light source at a constant angle to their flight path. Usually the sun (or moon for nocturnal species) is the only light source and flying that way will result in a practically straight line. The arms of spiral galaxies. Our own galaxy, the Milky Way, is believed to have four major spiral arms, each of which is roughly a logarithmic spiral with pitch of about 12 degrees, an unusually small pitch angle for a galaxy such as the Milky Way. In general, arms in spiral galaxies have pitch angles ranging from about 10 to 40 degrees. The nerves of the cornea. The arms of tropical cyclones, such as hurricanes. Spirals… Down the drain Back home, all of this has almost nothing to do with your bathtub drain, which creates another spiral shape. There is a popular myth, though, owing to the rotational direction of a hurricane, that says the water in bathtubs rotates a certain direction in the Northern Hemisphere. It's not true. Romanesco broccoli Mandelbrot set A section of the Mandelbrot set following a logarithmic spiral. The Mandelbrot set, named after Benoît Mandelbrot, is a set of points in the complex plane, the boundary of which forms a fractal. Applications Polar coordinates in two-dimensional space can be used only where point positions lie on a single two-dimensional plane. They are most appropriate in any context where the phenomenon being considered is inherently tied to direction and length from a center point. For instance, the examples above show how elementary polar equations suffice to define curves—such as the Archimedean spiral—whose equation in the Cartesian coordinate system would be much more intricate. Moreover, many physical systems—such as those concerned with bodies moving around a central point or with phenomena originating from a central point—are simpler and more intuitive to model using polar coordinates. The initial motivation for the introduction of the polar system was the study of circular and orbital motion. Position and navigation Polar coordinates are used often in navigation, as the destination or direction of travel can be given as an angle and distance from the object being considered. For instance, aircraft use a slightly modified version of the polar coordinates for navigation. In this system, the one generally used for any sort of navigation, the 0° ray is generally called heading 360, and the angles continue in a clockwise direction, rather than counterclockwise, as in the mathematical system. Heading 360 corresponds to magnetic north, while headings 90, 180, and 270 correspond to magnetic east, south, and west, respectively.[22] Thus, an aircraft traveling 5 nautical miles due east will be traveling 5 units at heading 90 (read zero-niner-zero by air traffic control).[23] Modeling Systems displaying radial symmetry provide natural settings for the polar coordinate system, with the central point acting as the pole. A prime example of this usage is the groundwater flow equation when applied to radially symmetric wells. Systems with a radial force are also good candidates for the use of the polar coordinate system. These systems include gravitational fields, which obey the inversesquare law, as well as systems with point sources, such as radio antennas. Radially asymmetric systems may also be modeled with polar coordinates. For example, a microphone's pickup pattern illustrates its proportional response to an incoming sound from a given direction, and these patterns can be represented as polar curves. The curve for a standard cardioid microphone, the most common unidirectional microphone, can be represented as r = 0.5 + 0.5sin(θ) at its target design frequency.[24] The pattern shifts toward omnidirectionality at lower frequencies The Golden Ratio In his book, "The Golden Ratio: The Story of Phi, the World's Most Astonishing Number" (Broadway Books, 2002), Livio describes among other things the remarkable connection between avian flight patterns, stormy weather and cosmic pinwheels. Livio said the logarithmic spiral is a key shape for anything that grows, because with growth the ratio does not change. But logarithmic spirals appear in totally unrelated phenomena. "They also appear, interestingly enough, when a falcon dives toward its prey," Livio said. The flight pattern allows the bird to maintain a constant angle. Head cocked, its eyes never waver. "It allows the falcon to keep its prey continuously in sight." Phi (not pi) is the number 1.618 followed by an infinite string. Take a rectangle whose sides conform to this Golden Ratio, carve from it a square, and the remaining rectangle still follows the ratio. The Golden Ratio also describes the everexpanding nature of what is termed a logarithmic spiral, not to be confused with the boring spiral created by a roll of toilet paper. You've seen the logarithmic spiral in a familiar seashell belonging to a creature called the chambered nautilus. Connection to spherical and cylindrical coordinates The polar coordinate system is extended into three dimensions with two different coordinate systems, the cylindrical and spherical coordinate systems. 3-D (Spherical) Polar Coordinates The 3-D polar coordinate system or the spherical coordinate system involves the distance from the origin and 2 angles (Figure 3). The position of point P is described as (r, ø,θ), where r = the distance from the origin (O), ø = the horizontal azimuth angle measured on the XY plane from the X axis in the counterclockwise direction, and θ = the azimuth angle measured from the Z axis. Again, the coordinates are not the same kind. Figure 3