Group Behaviors and Artificial Life
advertisement

Group Behaviors and
Artificial Life
Claire O’Shea
COMP 259 – Spring 2005
Overview
Motivation
“Flocks, Herds, and Schools”
“Artificial Fishes”
“Cognitive Modeling”
“Constrained Animation of Flocks”
Summary
Motivation
Many animations require natural-looking
behavior from a large number of
characters
Flock of birds
School of fish
Crowd of people
Motivation
How do we generate this motion?
Keyframe every character
This is very labor-intensive, usually ends up
looking unrealistic
OR...
Let each character generate its own motion!
Much easier, and produces natural, unscripted
motion
Motivation
Questions about this method
How do we write rules to define natural
behavior?
Can self-directed characters do anything
“intelligent”?
How can we give the animator some control
over the scene?
We’ll find out in the papers…
“Flocks, Herds, and Schools: A
Distributed Behavioral Model”
Craig W. Reynolds, 1987
“Flocks, Herds, and Schools”
“A flock is simply the result of the
interaction between the behaviors of
individual birds.”
Model a flock of “boids” (bird-oids) as a
particle system
Each particle has an orientation
Behavior of one particle depends on other
particles
“Flocks, Herds, and Schools”
Modeling boid flight
The boid itself can move only in one direction
(“forward” along its local positive z-axis)
The boid steers by rotating about its local x and y
axes
The boid’s local coordinate system can move and
rotate freely within world coordinates
“Flocks, Herds, and Schools”
Modeling boid flight
Banking turns
The y-axis is always aligned with the direction of acceleration
During straight flight, this is gravity
During a turn, radial forces cause the bird to “bank” (rotate
around its z-axis)
“Flocks, Herds, and Schools”
Modeling boid flight
Gravity is used only to help define banking
angle; it is not actually applied as a force
Upper bounds are set on speed and
acceleration
Other forces (buoyancy, drag) are not
modeled
“Flocks, Herds, and Schools”
Modeling flocking behavior
Three basic rules, each of which generates an
acceleration request
1.
Collision Avoidance
2.
Velocity Matching
3.
Avoid running into other boids or static obstacles
Match velocity with nearby flockmates
Flock Centering
Stay close to nearby flockmates
“Flocks, Herds, and Schools”
Combining acceleration requests
Weighted average
Fails in certain critical situations (ex. imminent
collisions)
Prioritized allocation
Acceleration requests are accepted in priority
order, until the maximum acceleration is reached
Works well (at least for this simple system)
“Flocks, Herds, and Schools”
Simulated Perception
All the behavior rules depend only on nearby
objects
An individual boid is only aware of other boids
which lie in a spherical region around it
Sensitivity falls off as the inverse square of the
distance
Demo: A flock of boids
“Artificial Fishes: Physics,
Locomotion, Perception, Behavior”
Xiaoyuan Tu and Demetri
Terzopoulos, 1994
“Artificial Fishes”
Simulate a fish using a “holistic model”
Physical form
Movement
Perception
Behavior
“Artificial Fishes”
Fish Physics
Spring-mass model
23 point masses, 91 springs
External springs are “muscles”
Fish moves by changing the rest length of these springs!
“Artificial Fishes”
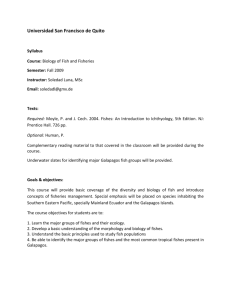
Fish Movement: Swimming
Fish swings its tail back and forth
by alternately contracting and
relaxing the muscles on each side
Displacement of water produces a
reaction force normal to the fish’s
body (Fiw)
{r1, s2, r2, s2} – amplitude and
frequency of muscle contractions
Control amount of force, and thus
swimming speed
Optimal values found experimentally
A reaction force (Fiw) is applied
at point ni and acts along the
inward normal. It propels the
fish both sideways and forward.
“Artificial Fishes”
Fish Movement: Turning
Fish quickly contracts the muscles on one side
while relaxing them on the other
{r0, s0, r1, s1} – contraction amplitude and
frequency of the turning muscles
Experimentally determined for turns of 30, 45, 60,
and 90 degrees
Arbitrary turns are generated by interpolating
these parameters
“Artificial Fishes”
More Fish Movement
Pitch and yaw are controlled by the pectoral fins
Force applied on the fins:
fish’s velocity
angle of fin
surface area
to body
F f Α(n v)n Α(||v|| cos γ)n
fin’s normal
vector
Raising or lowering the leading edge of the fin makes the
fish swim up or down
Setting the two fins at different angles causes fish to roll
Setting fins perpendicular to body decreases forward speed
“Artificial Fishes”
Fish Perception
Simplified simulation of vision
Fish can see things that are within its viewing
volume (a 300 degree solid angle around its
head) and not occluded
Radius of viewing volume determined by
translucency of the water
“Artificial Fishes”
Fish Behavior
Fish behavior is influenced by several factors
Individual habits (preset by animator)
Mental state (functions evaluated at each
timestep)
Perceived environment
Intention generator picks an intention based
on these factors.
“Artificial Fishes”
Fish Behavior
Mental state
Hunger:
digestion rate time since
last meal
amount eaten
H (t ) min[ 1 ne (t ) R(t H ) / ,1]
libido
function
Libido:
time since
last mating
L(t ) min[ s(t L )(1 H (t )),1]
fear of predator i
Fear:
appetite
distance to
predator i
F (t ) min[ F i ,1] F i min[ D0 / d i (t ),1]
i
“Artificial Fishes”
Intention Generator
Decides on a behavior based on mental
state and priority ordering:
1.
2.
3.
4.
Check for imminent collisions
Check for nearby predators (calculate F(t))
Evaluate hunger and libido (H(t) and L(t))
Evaluate happiness with the ambient conditions
“Artificial Fishes”
A complete fish model:
“Artificial Fishes”
Different types of fish can be created just by changing
the intention generator!
Predator:
Prey:
Demo: Foraging Fish
“Cognitive Modeling: Knowledge,
Reasoning and Planning for
Intelligent Characters”
John Funge, Xiaoyuan Tu, and
Demetri Terzopoulos, 1999
“Cognitive Modeling”
Builds on the idea of a
holistic character
model, but adds
another layer: cognitive
modeling
Character can learn
about its environment
Character can plan
ahead to achieve goals
“Cognitive Modeling”
Some AI background: situation calculus
Situation: a description of the state of the world at a
given time
Fluent: a property of the world that can change over
time
Primitive action: function that translates from one
situation to another situation
Precondition axiom: a statement about the state of
the world before the primitive action
Effect axiom: a statement about the state of the
world after the primitive action
“Cognitive Modeling”
Situation calculus examples:
(These examples are in CML, a language developed for this paper)
Fluent:
Broken(x, s)
Whether x is broken
in situation s
Precondition axiom:
action drop(x) possible when Holding(x)
A primitive action
Effect axiom:
occurrence drop(x) results in Broken(x)
“Cognitive Modeling”
Domain knowledge specification
Character should not have perfect knowledge of the
world; this is unrealistic and uninteresting.
A better model: character makes plans based on
limited information, “knows” when it needs more
information
Need a way to express uncertainty about aspects of
the world!
“Cognitive Modeling”
Interval-valued Epistemic Fluents
The usual way to represent uncertainty in AI is with
epistemic κ-fluents, but these are difficult to
implement.
An alternative is to use interval arithmetic!
For each sensory fluent f, introduce an interval-valued
epistemic fluent If.
The width of the IVE fluent expresses uncertainty
about the value of f.
“Cognitive Modeling”
Interval-valued Epistemic Fluents: Example
speed(x, s): the speed of object x in situation s
Ispeed(s): what the character “thinks” the speed of x is in situation s
Suppose we know the speed at s0:
speed(x, s0) = 20
Ispeed(s0) = <20, 20>
As time goes on, we are less
certain about the value!
speed(x, s1) = 25
Ispeed(s1) = <10, 30>
“Cognitive Modeling”
Character direction
A character can “plan” by finding a sequence
of primitive actions that accomplish a goal
Equivalent to searching a tree
Complexity: exponential in the length of the plan!
Animator can “prune” the search space by
specifying complex actions (sequences of primitive
actions)
Results in nondeterministic behavior; the
same goal can be accomplished in many
different ways!
“Cognitive Modeling”
Creating an animation with “smart” characters
Still need all the lower-level modules (physics, perception,
behavior, etc)
Add a reasoning engine to choose a low-level behavior!
“Cognitive Modeling”
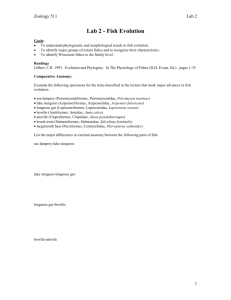
Example: Prehistoric world
A T-Rex wants to chase raptors out of its territory
It knows that they will run away when it approaches,
so it “herds” them out
“Cognitive Modeling”
Example: Undersea world
A merman tries to escape from a shark
The merman hides behind obstacles, so that the
shark can’t see him
“Constrained Animation of
Flocks”
Matt Anderson, Eric McDaniel, and
Stephen Chenney, 2003
“Constrained Animation of Flocks”
The papers we have looked at so far focus
on creating animations with minimal input
from the animator
But in real applications, the animator
usually wants to specify what happens in
the scene!
“Constrained Animation of Flocks”
Two-step model for constrained animation
Produce a trajectory that satisfies the
constraints
Evaluate plausibility and refine the trajectory
“Constrained Animation of Flocks”
Constraints
Point constraints: a character must be at a point at a
certain time
Center-of-mass constraints: the center of mass of
some group must be at a point at a certain time
Shape constraints: a group must lie inside a polygonal
shape
Except for point constraints, these are not
guaranteed to be satisfied – only approximated.
“Constrained Animation of Flocks”
Behavior model
Based on Reynolds’ model
Each character gets a randomly sampled wander impulse at each
timestep.
The wander contribution added to the character is a combination
of this wander impulse and the normalized wander contribution
from the previous timestep.
ŵci-1: previous wander contribution
(normalized)
wii: current wander impulse
wci: total wander contribution for
this timestep
“Constrained Animation of Flocks”
Finding initial trajectories
Find configurations that satisfy all the
constraints, then interpolate trajectories in the
“windows” between them
Possible methods (some or all of these may
be used):
Forward simulation
Path transformation
Backward simulation
“Constrained Animation of Flocks”
Finding initial trajectories
Forward simulation
Used when initial conditions are given for a
window
Position characters to meet initial conditions, then
run an unconstrained simulation using the
behavior model
“Constrained Animation of Flocks”
Finding Initial Trajectories
Path Transformation
Used when the window is part of a sequence of
point or COM constraints
Fit a B-spline curve through the sequence of points
Run a forward simulation, and at each timestep,
move the character onto the curve
“Constrained Animation of Flocks”
Finding Initial Trajectories
Backward Simulation
Used when end constraints are given for the window
Position characters to meet end constraints, then
run the simulation backwards (just reverse the birds’
perception)
Blend the resulting trajectory (xbackward) with the
forward simulation (xforward) using a weighting
function:
x (1 u ) x forward uxbackward
u (2t 3t )
3
2
“Constrained Animation of Flocks”
Evaluating plausibility of an animation
Determine whether the wander impulses are
plausibly distributed (gw)
Determine how well the animation satisfies the
COM and shape constraints (gc, gs)
Bias the animation toward producing a single flock
(gf)
The overall plausibility function:
g ( A) g w ( A, t ) g c ( A, t ) g s ( A, t ) g f ( A, t )
t
“Constrained Animation of Flocks”
Evaluating the wander impulses
From the given trajectories, we can deduce the
wander impulse of each character at each timestep
gw evaluates whether the wander impulses look like
they were sampled from the right distribution
In this model, the wander impulses had uniformly
random direction and normally distributed length, so
we evaluate how well the lengths |wii| fit a normal
distribution:
g w ( A, t )
i
1
w 2
e
||wii ( A,t )||/ 2 w 2
“Constrained Animation of Flocks”
Evaluating constraint enforcement
Center of mass constraints:
COM(A, t) is the center of mass of the group at time t
Cx is the center of mass defined in the constraint
g c ( A, t )
C
Shape constraints:
1
com 2
e
||COM ( A,t ) C x ||/ 2 com2
cs is a user-defined constant
dist(S, A, t) calculates the sum-of-squares distance of each
character from the shape
g s ( A, t ) e cS dist( S , A,t )
S
“Constrained Animation of Flocks”
Generating a better animation
If the current animation fails the plausibility
test, the system generates a new one using
one of the following strategies:
Completely re-generate some or all of the
trajectories
Add random “bumps” to a trajectory
Change the character’s velocity along a trajectory
Only point constraints are enforced during this
phase
“Constrained Animation of Flocks”
Repeat the sampling process for a given
number of iterations, or until a plausible
animation is found.
This animation was generated in 1000 iterations (about two hours)
Demo: Constrained Flocking
Summary
“Flocks, Herds, and Schools”
Simulates “boid” physics, perception, and
behavior
Fairly unrealistic physics – no attempt to
actually model flight
Fast and simple to implement, scales well to
large numbers of characters
No real control possible from animator
Summary
“Artificial Fishes”
Simulates fish physics, perception, behavior,
and intentions
Realistic physics is used for movement
(though not always for rendering)
Intention generator enables fish to engage in
complex behaviors
No animator control possible, except in
choosing initial values
Summary
“Cognitive Modeling”
Adds another layer of character simulation
(cognitive model)
IVE fluents create a realistic model of
character’s domain knowledge
Tree searching lets character “plan ahead” to
accomplish a goal
Animator can help control scene by scripting a
series of actions
Summary
“Constrained Animation of Flocks”
Introduces random variation into the
trajectories using a wander impulse
Allows animator to specify constraints on
movement
Not real-time: requires an iterative refining
process
Produces “plausible enough” trajectories, not
always completely realistic ones
Summary
AI methods can generate complex animation of
multiple characters without low-level control
from the animator
Behavior rules can be combined with a
physically-based model to create realistic scenes
Problems:
Difficult to implement user-specified constraints
Complexity issue: hard to generate scenes with many
characters in real time