2.2 MB PowerPoint
advertisement

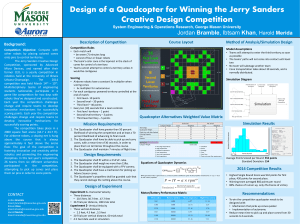
Camden Mendiola Ben Houston Monty Prekeris Dan Rice Dan “Klitz” Johnson • To provide a flexible low power wireless aerial/terrestrial network that allows the user to survey, sense, and respond • Useful for military, police, search and rescue • Localized and self managed Ben BASE STATION • Foundational PC Control software complete QUADCOPTER • Quadcopter Prototype 1.0 built and ready for testing • Basic flight software and testing in progress Hover; Landing; Heading; Directional Movement • GPS and Environmental Sensors in development GROUND MODULE • Part list complete • Schematic and PCB in preliminary phase Ben Milestone 1: Basic Flight Commands • Hover; Manual Landing; Heading Basic Mesh Network Capabilities • Preliminary Integration of Modules Milestone 2: Advanced Flight Commands • Directional Movement with GPS Integration, Automatic Landing Advanced Environmental Sensor Integration through Mesh Network EXPO: Autonomous Flight Patterns Complete Mesh Network Integration Ben Ben Level 0: Wireless Sensing Network Quadcopter Platform User Interface Terrestrial Platform Power Ben Environmental Data Level 1.1: Quadcopter Battery Harness ESC’s Motors Power Circuit CPU Radio Comm. Ultrasonic Logic Converter Environ. Sensors Accelerometer Barometer Magnetometer Gyroscope Ben 11.1V GPS 5V 3.3V PWM Serial SPI (3.3V Signal) Level 1.2: Terrestrial Unit Gen. I/0 Analog 5V 9V Serial I2C 3.3V Alarm Battery Power Circuit CPU Radio Comm. ADC Air Quality Gas Sensor Heart Rate Monitor Ben Cam Version 1 of PCB has been completed and ordered. A testing strategy is currently in development Microprocessor Motor Control Circuit PWM PWM PWM PWM Cam Cam M8RXD MOS12 SCK2 YLED2 YLED3 1 1 1 1 1 1 1 9 6 5 4 3 2 1 0 D N G P P P PD7 PD6 PD5 PD4 PD3 B B B PB3 PD2 T8RXD 2 1 0 8 1 7 PB4 PD1 7 Cap 1 8 F n 0 0 1 PB5 PD0 9 1 ATMEGA-A8U2 6 C14 PB6 PC2 0 2 U65 5 U AVCC PB7 UCAP UVCC 1 2 G PC7 D N G C C V 4 D N G P P N 2 2 3 D C C D + 4 2 - PC6 5 3 RESET 1 L 2 L T X A D 2 V 5 XTAL1-A A T X XTAL2-A 4 2 1 2 2 2 2 2 3 3 3 Component_1 5 6 7 8 9 0 1 2 2 1 2 1 U10 2 2 2 2 2 - 6 5 1 0 7 4 1 Res2 Res2 D N G R17 R16 4 F u 1 K 1 + D + D 1 J 3 C16 Varistor - D - D 2 R20 S U B V 1 D - K 1 D USBVCC Varistor + R19 Component_1 USBVCC 2 1 2 1 9 U F n 0 0 1 Cap Serial Converter Circuit D N G XTAL2-A F n 0 0 1 Pol1 Cap Pol1 Cap Cap 8 C MC33269ST-50 6 C 7 C 1N914 Diode F u 7 4 F u 7 4 Vin 3 Heatsink Vout 4 2 Diode Gnd 1 blackconnector Vin 2 7 U 2 3 3 1 1 1 U D N G V 5 Power Circuit Cam Cam 7 2 Res2 XTAL1-A Component_1 7 R SCL 6 1 5 G 1 4 3 3 2 Crystal 2 2 U SCL-L 1 1 2 2 1 1 1 1 5 6 D N G 0 1 4 D N 0 1 9 9 8 8 2 F F 2 p C10 2 Cap 6 R p Res2 2 2 M 1 3.3V 7 1 D N G 7 1 V 5 2 Cap ? U SDA-L SDA 9 C XTAL2-A Oscillator Circuit Logic Level Circuit XBee Circuit Cam Generate Initial Pulse Chirp Initial Pulse Ultrasonic Begin Count Calculate Distance Cam Listen for Echo Stop Count when Echo Detected MOSFET Driver Battery PWM Speed Command Cam Motor RPM • Converts DC into 3 phase AC • Back EMF used to detect rotation • RPM adjusted by Pulse Width to each phase HobbyWing FlyFun Brushless ESC Cam • Gyro • Accelerometer • Magnetometer Klitz ITG-3200 • • • • Klitz Triple Axis 3 16-bit ADC’s 400kHz I2C Interface Key element for stabilization ADXL345 • 3 Axis Accelerometer • High performance g-sensor Klitz • Measures Strength or Direction of Magnetic Field (Compass) • 3 Axis • 1 to 2 degree range of accuracy • I2C interface • Sensitivity of 0.10 μT • Allows heading tracking Klitz HMC5843 BMP085 300 to 1100 hPa (atmospheric pressure) Accuracy of 0.3 hectopascals I2C Interface Maintains altitude of Quadcopter • Beneficial in Autonomous landing • • • • Klitz • Safely Converts 5V to 3.3V and 3.3V to 5V • Converts 4 pins at one time • I2C Interface Klitz LEVEL 1.0.0: QUADCOPTER BASIC FLIGHT Monty Take Off Hover Land Directional Movement (Left, Right, Forward, Back) LEVEL 1.1.0: QUADCOPTER BASIC FLIGHT Set GPS Coordinate Monty Check GPS Check Heading Set Heading Set Direction Adjust Appropriate Motors HOVER NO Check if flat YES Check Accel. Z > 0 In Z direction Z<0 Increase Motor Speed Monty Decrease Motors Speed DIRECTIONAL MOVEMENT Set Pitch or Roll Monty Is Z decreasing Or increasing Adjust Appropriate Motors No HEADING Set Heading Check Mag Check Hover Yes Adjust Motors Monty Set Yaw Check Hover LANDING No Read Ultrasonic No Increase Decel. Monty Decrease Decel. No Yes Check Alt. Above Threshold? Yes Decrease Decel. to min value Accel. = 0 Yes Kill Motors Level 1.2.0 TERRESTRIAL UNIT Get Sensor Data Health Readings Abnormal? NO YES Set Local Alarm Wireless Alert to Base Station Send Local Data to Base Station Monty Receive Packet Send Packet Monty Get Packet Parse Process: Commands and Data Process: Polling Based Build Transmit Packet parse_sample( ) IO_data_sample_RX( ) Monty Dan Current user interface for Command PC is text-based. Displays information based on commands received from user. Dan Goal: Create a user interface that uses information received from the Quadcopter to display information about flight status. Need to incorporate Google Maps with GPS data. Test 1: Test 2: ◦ Enough Lift with given weight/propellers/motors Result: ◦ Quadcopter had plenty of lift with plenty of motor speed to spare ◦ Ultrasonic sensors range and reliability Result: ◦ At low propeller speed ultrasonic sensors were unaffected, but had narrow beam width A Node Discovery(ND) command can be broadcast to discover which nodes are in the network. On right, Quadcopter and Terrestrial unit are part of the network. Timing Diagram of a packet being transmitted over XBee using the Intronix Logicport RPM vs PWM (no load) 12,130 rpm maximum at 60% duty cycle Lift occurs at 9,800 rpm (old frame) Increasing duty cycle gives minimal rpm gain after 60% Dan 14000 12000 10000 RPM 8000 6000 4000 2000 0 25 30 35 40 45 50 Duty Cycle (%) 55 60 65 RPM vs Current Draw (per motor) 14000 0.662 A maximum current (steady state) draw at max 12,130 rpm (no load) 12000 10000 Current is not dependent on PWM duty cycle Current spikes occur when incrementing large rpm steps Dan RPM 8000 6000 4000 2000 0 0 0.1 0.2 0.3 0.4 Current (A) 0.5 0.6 0.7 Quadcopter PCB w/components Barometer Accelerometer Magnetometer Gyro Frame ATMEGA 2560 Battery Wiring Harness 4 ESC's 4 Motors 4 Propellers + Extras Logic Level Converter Ultrasonic Range Finder XBee ZB Gas Temperature Klitz Terrestrial Unit Base Station XBee ZB XBee ZB Heart Rate Monitor CPU: PC Gas Sensor XBee Explorer Optical Air Quality Sensor AT89C51RC2 32 kB NVSRAM PCB w/ components Phase 1: PCB Design Flight Command Functional Decomposition Phase 2: Testing PCB Revision and Design Environmental Sensor *Hardware design *Software design XBee Mesh Network Phase 3: Basic Auto Patterns GPS Integration Klitz Ben Camden Daniel Klitz Monty Klitz