REU 2007-Kicker Design for Soccer Playing Robots
Jameson Beebe, Mentors: Dr. Alfredo Weitzenfeld
L1
D1
1
Introduction
The USF Robobulls are a group of engineering students at USF
who participate in the design of soccer playing robots. This is
done with the intent to compete at the robotics soccer competition
Robocup in the small sized league.
2
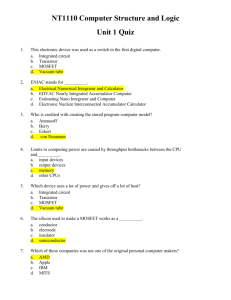
Results
The actual results differed from the results achieved in the
simulations. In the lab tests, the capacitor only charged to
approximately 170V in 30 seconds while the simulation predicted that
the capacitor would charge to 250V in 3.79 seconds. The reasons
behind this difference was in the size of the inductor used and the
frequency at which the circuit was pulsed. The mosfet used in the lab
test was heating up too much and a few mosfets were burned up
because of the heat.
V2
M1
IRF 740
C1
V1
To resolve this, a smaller inductor needs to be used, and the circuit
needs to be pulsed at a much higher frequency (maybe in the 1.5Mhz
range). This will allow less current to be pulled through the mosfet for
a shorter time and reduce the heat imposed on the mosfet.
0
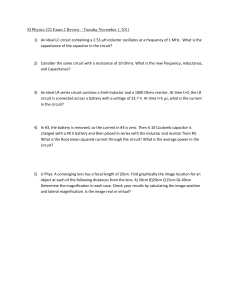
Kicker Circuit schematic
300
(3.7967,250.571)
Robots used in the small size league competition.
Conclusion
200
Objective
The robots need to kick a ball as a fundamental part of the game.
The current kicker being used is a DC-DC charger and is
expensive, slow, and heavy. As a primary objective, I had to redesign the kicker circuit to be cheaper, faster, and lighter. The
robots need to be able to kick the ball approximately 20 feet.
Methodology
For a higher voltage to be achieved, I decided to use a boost
converter design as shown below. The actual setup was tested
using two circuits in parallel to charge two different capacitors.
When the capacitors were fully charged, they both
simultaneously discharged through the solenoid and produce a
very strong kick.
100
(3.8000,35.782)
0
0s
V(U4:2)
0.5s
-I(R3)
1.0s
1.5s
2.0s
2.5s
3.0s
3.5s
Time
When two charging circuits were used in parallel, this simulated result was achieved.
4.0s
This circuit is a very good design for use in not only a robotic kicking
circuit, but in many other high voltage applications too. Also, it was
found out that using the boost converter design, it doesn’t matter how
high of current you draw, it is the physical amount of current you draw.
So you can use a small amount of current, but pulse the circuit really
fast and achieve the same results if not better. The main limiting factor
in this research was waiting for parts to arrive at the lab. At times, it
would take 2 weeks for new parts to arrive, and fully test.
Acknowledgements
I would like to thank our mentor Alfredo Weitzenfeld, and all those
who supported USF Robobulls by monetary contribution.
Department of Computer Science & Engineering
 0
0