Here
advertisement

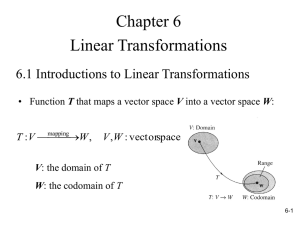
HCI 530 : Seminar (HCI) • Damian Schofield HCI 530: Seminar (HCI) • Transforms – Two Dimensional – Three Dimensional • The Graphics Pipeline Types of Transformation In computer graphics many applications need to alter or manipulate a picture, for example, by changing its size, position or orientation. This can be done by applying a geometric transformation to the co-ordinate points defining the picture. Translation A common requirement is to move a picture to a new position. This is achieved by means of a translation or shift transformation. Translation The new co-ordinates of the point (x’, y’) are given by x’ = x + tx y’ = y + ty Scaling A scaling transformation is used to change the size of an object. x’ = x . sx y’ = y . sy If | sx | and | sy | are both > 1, the effect is to increase the size of an object. In order to reduce the size of an object, | sx | and | sy | must both be < 1. Scaling The figure illustrates a symmetric or uniform scaling transformation in which the x- and yscale factors are the same (sx = sy) so that the object is expanded by the same amount in each axis direction. Scaling This figure illustrates two asymmetric or non-uniform scaling transformations in which the x- and y- scale factors are not equal (sx sy). Here the object changes its size by different amounts in the x- and y- axis directions. Scaling If the scale factor in x is negative (sx < 0) then the object is reflected in the y-axis. Similarly if the scale factor in y is negative (sy < 0) then the object is reflected in the x-axis. Rotation Another common type of transformation is rotation. This is used to orientate objects. The figure shows an object rotated by and angle a about the origin. Rotation A line joining the point with the origin makes an angle b with the x-axis and has a length R, hence: x = R . Cosb y = R . sinb After rotation the point has co-ordinates x’ and y’ with values x’ = R . cos (a + b) y’ = R . sin (a + b) Rotation Expanding these formulae for cos (a + b) and sin (a + b) and rearranging gives x’ = R . cosa . cosb - R . sina . sinb y’ = R . sina . cosb + R . sinb . cosa Finally, substituting for R . cos b and R . sin b gives x’ = x . cosa - y . sina y’ = x . sina + y . cosa Shearing A shear transformation has the effect of distorting the shape of an object. The new x- and y- co-ordinates of a point after shearing are given by x’ = x + y a If a 0 then a shear in x is obtained. Similarly, if b 0 then a shear in y is obtained. y’ = y + x b Matrix Representation For each of the basic transformations we can derive an expression for the new coordinates of a point after transformation. We can now write down a general formula for the transformation of points. x’ = a x + b y + c y’ = d x + e y + f where a, b, c, d, e, and f are all constants. Matrix Representation We can now write down a general formula for the transformation of points. x’ = a x + b y + c y’ = d x + e y + f where a, b, c, d, e, and f are all constants. The expressions for x’ and y’ are linear functions of x and y. This can be expressed using matrices as x' a b x c y ' d e y + f Matrix Representation Now include all of the constants in one matrix x x' a b c y ' d e f y 1 A square matrix is much easier to deal with so the matrix is extended to a 3x3 matrix. x' a b c x y ' d e f y w' g h i 1 The column vectors representing points now have and extra entry. If the bottom row of the matrix is [0 0 1] then w’ will be 1 and we can ignore it. Matrix Representation Revision .... Matrix Revision You probably know what a matrix is already. However, a quick example won't hurt. A matrix is just a two-dimensional group of numbers. Instead of a list, called a vector, a matrix is a rectangle, like the following: You can set a variable to be a matrix just as you can set a variable to be a number. In this case, x is the matrix containing those four numbers (in that particular order). Matrix Revision Matrix Revision Adding and Subtracting Matrices Matrix addition is fairly simple, and is done entry-wise. Add the following matrices: Matrix Revision Add the following matrices: I need to add the pairs of entries, and then simplify for the final answer: So the answer is: Matrix Revision Add the following matrices: I need to add the pairs of entries, and then simplify for the final answer: So the answer is: Matrix Revision Up until now, you've been able to add any two things you felt like: numbers, variables, equations, and so forth. But addition doesn't always work with matrices. Perform the indicated operation, or explain why it is not possible. Since matrices are added entry-wise, I have to add the 1 and the 4, the 2 and 5, the 0 and the 7, and the 3 and the 8. But what do I add to the 6 and to the 9? There are no corresponding entries in the first matrix that can be added to these entries in the second matrix. Matrix Revision Up until now, you've been able to add any two things you felt like: numbers, variables, equations, and so forth. But addition doesn't always work with matrices. Perform the indicated operation, or explain why it is not possible. So the answer is: I can't add these matrices, because they're not the same size. This is always the case: To add two matrices, they must be of the same size. If they are not the same size (if they do not have the same "dimensions"), then the addition is "not defined" (doesn't make mathematical sense). Matrix Revision Subtraction works entry-wise, too. Given the following matrices, find A – B. A and B are the same size, each being 2 × 3 matrices, so I can subtract, Matrix Revision Matrix Revision Matrix Multiplication Here is a key point: You cannot just multiply each number by the corresponding number in the other matrix. Matrix multiplication is not like addition or subtraction. It is more complicated, but the overall process is not hard to learn. Matrix Revision Matrix Multiplication You cannot just multiply each number by the corresponding number in the other matrix. Example: Solution: Matrix Revision Matrix Multiplication Matrix multiplication is not an easy task to learn, and you do need to pay attention to avoid a careless error or two. Here's the process: Step 1: Move across the top row of the first matrix, and down the first column of the second matrix: Matrix Revision Matrix Multiplication Matrix multiplication is not an easy task to learn, and you do need to pay attention to avoid a careless error or two. Step 2: Multiply each number from the top row of the first matrix by the number in the first column on the second matrix. In this case, that means multiplying 1*2 and 6*9. Then, take the sum of those values (2+54): Matrix Revision Matrix Multiplication Matrix multiplication is not an easy task to learn, and you do need to pay attention to avoid a careless error or two. Step 3: Insert the value you just got into the answer matrix. Since we are multiplying the 1st row and the 1st column, our answer goes into that slot in the answer matrix: Matrix Revision Matrix Multiplication Matrix multiplication is not an easy task to learn, and you do need to pay attention to avoid a careless error or two. Step 4: Repeat for the other rows and columns. That means you walk down the first row of the first matrix and this time the second column of the second matrix. Then the second row of the first matrix and the first column of the second, and finally the bottom of the first matrix and the right column of the second matrix: Matrix Revision Matrix Multiplication Matrix multiplication is not an easy task to learn, and you do need to pay attention to avoid a careless error or two. Step 5: Insert all of those values into the answer matrix. If you work the other two numbers, you will get 1*2+6*7=44 and 3*2+8*9=78. Insert them into the answer matrix in the corresponding positions and you get: Matrix Revision Matrix Multiplication What if the matrices aren't squares? Then you have to add another step. In order to multiply two matrices, the matrix on the left must have as many columns as the matrix on the right has rows. That way you can match up each pair while you're multiplying. The size of the final matrix is determined by the rows in the left matrix and the columns in the right. Matrix Revision Matrix Multiplication In order to multiply two matrices, the matrix on the left must have as many columns as the matrix on the right has rows. That way you can match up each pair while you're multiplying. The size of the final matrix is determined by the rows in the left matrix and the columns in the right. Matrix Revision x' 1 2 3 10 y ' 4 5 6 20 z ' 7 8 9 30 x' 10 + 40 + 90 140 y ' 40 + 100 + 180 320 z ' 70 + 160 + 270 500 Matrix Revision Matrix Representation (2) For each of the basic transformations we can derive an expression for the new coordinates of a point after transformation. We can now write down a general formula for the transformation of points. x’ = a x + b y + c y’ = d x + e y + f where a, b, c, d, e, and f are all constants. Matrix Representation (2) We can now write down a general formula for the transformation of points. x’ = a x + b y + c y’ = d x + e y + f where a, b, c, d, e, and f are all constants. The expressions for x’ and y’ are linear functions of x and y. This can be expressed using matrices as x' a b x c y ' d e y + f Matrix Representation (2) Now include all of the constants in one matrix x x' a b c y ' d e f y 1 A square matrix is much easier to deal with so the matrix is extended to a 3x3 matrix. x' a b c x y ' d e f y w' g h i 1 The column vectors representing points now have and extra entry. If the bottom row of the matrix is [0 0 1] then w’ will be 1 and we can ignore it. Matrix Representation The formulae for each of the different types of transformation can now be written using this matrix notation. Translate Scale 1 0 t x 0 1 t y 0 0 1 Rotate S x 0 0 0 Sy 0 0 0 1 Shear cos a sin a 0 sin a cos a 0 0 0 1 1 a 0 b 1 0 0 0 1 Matrix Representation x' a b y ' d e z ' g h c x f y i z x' ax + by + cz y ' dx + ey + fz z ' gx + hy + iz Matrix Representation There is a special matrix which leave the co-ordinates x’ and y’ equal to x and y. This is known as the unit or identity matrix. x’ = x y’ = y w’ = 1 x' 1 0 0 x y ' 0 1 0 y w' 0 0 1 1 Concatenation of Transforms We have examined the basic types of transformation and derived the corresponding matrices. In this section we will see how these transformations can be combined to perform more complex operations such as rotation or scaling about an arbitrary point. Concatenation of Transforms Consider the transformation to rotate an object about its centre point (xc, yc). This can be broken down into a series of basic transformations as follows: • Translate the object by (-xc, -yc) so that the centre is at the origin. • Perform a rotation about the origin. • Translate the object by (xc, yc) to return it to its original position. Concatenation of Transforms Concatenation of Transforms This series of transformations is illustrated in the previous figure. How can this composite transform be expressed in terms of matrices? If we apply each of the component transforms separately: Translate by (-xc, -yc): x1 1 0 xc x y 0 1 y y c 1 1 0 0 1 1 Concatenation of Transforms Rotate by an angle a about the origin x2 cos a y sin a 2 1 0 sin a cos a 0 0 x1 0 y1 1 1 x2 cos a y sin a 2 1 0 sin a cos a 0 0 1 0 xc x 0 0 1 yc y 1 0 0 1 1 Concatenation of Transforms Translate by (xc, yc): x3 1 0 xc x2 y 0 1 y y c 2 3 1 0 0 1 1 x3 1 0 xc cos a y 0 1 y sin a c 3 1 0 0 1 0 x3 cos a y sin a 3 1 0 sin a cos a 0 sin a cos a 0 0 1 0 xc x 0 0 1 yc y 1 0 0 1 1 ( xc cos a xc + sin a yc ) x ( yc sin a xc + cos a yc ) y 1 1 Concatenation of Transforms The net effect of this transformation is to map the point (x, y) onto the point (x3, y3). This mapping can be expressed as the matrix multiplication of the three basic transformation matrices used. The value of using square matrices to represent transformations can now be seen. Square matrices can be multiplied together to produce another square matrix of the same dimensions. Hence composite transformations can be expressed as a single transformation matrix by multiplying them together. x3 cos a y sin a 3 1 0 sin a cos a 0 ( xc cos a xc + sin a yc ) x ( yc sin a xc + cos a yc ) y 1 1 Concatenation of Transforms Ordering of Transforms We have already seen how more than one transformation can be combined by multiplying together the corresponding transformation matrices. Matrix multiplication is not a communitive operation. M1 M2 M2 M 1 In the same way, the application of transformations is not, in general, commutative and therefore the order in which transforms are combined is important. Ordering of Transforms The first example shows the effect of rotating and then translating the object. The second does the same translation and rotation but in a different order, first translating and then rotating the object. The effect in both cases is clearly not the same. Homogenous Coordinates To obtain square matrices an additional row was added to the matrix and an additional co-ordinate, the w- co-ordinate, was added to the vector for a point. In this way a point in 2D space is expressed in three-dimensional homogeneous co-ordinates. The technique of representing a point in space whose dimension is one greater than that of the point is called homogeneous representation. It provides a consistent, uniform way of handling affine transformations. Homogenous Coordinates On converting a 2D point (x, y) to homogeneous co-ordinates the w- coordinate is set to 1, giving the corresponding homogeneous co-ordinate point (x, y, 1). This may then be transformed by the 3x3 homogeneous transformation matrix as shown below. x' a b c x y ' d e f y w' g h i 1 Homogenous Coordinates In general, the elements in the bottom row of the matrix, g, h and i, may be set to any value resulting in w 1. The effect of this general transformation matrix is to transform a point (x, y, 1) in the w = 1 plane onto the point (x’, y’, w’) in the w = w’ plane. The real-world co-ordinate space is the plane w = 1. And therefore the transformed point must be mapped back onto the w = 1 plane. This is done by projecting the point x’, y’ w’ onto the plane w = 1. Homogenous Coordinates Homogenous Coordinates The 2D real-world point is (x”, y”) where x” and y” are the x- and y- co-ordinates of the projected point. The mathematical effect of the projection is that of dividing the x- and y- components by the w- component. Hence x” = x’ / w’ y” = y’ / w’ Homogenous Coordinates The resulting homogeneous point is (x, y, 4). We obtain the corresponding 2D point by performing the homogeneous division. This gives us the point (x/4, y/4). From this we can see that the bottom right element in the matrix performs overall or uniform scaling. x ' 1 0 0 x y' 0 1 0 y w' 0 0 4 1 Object and Axis Transformations The types of transformations we have examined up to now are known as object transformations. We think of the object being transformed, while the axes remain fixed. There is a another way of looking at transformations - as axis transformations. Here, the object remains fixed while the axes are changed. Object and Axis Transformations Normalisation Transformations Normalisation Transformations The window and viewport are aligned with their respective axes and are therefore defined by their bottom left and top right hand corners. The two corners of the window are given by the points (wxmin, wymin) and (wxmax, wymax). The corresponding corners of the viewport are (vxmin, vymin) and (vxmax, vymax). Normalisation Transformations Apply a transformation to map the bottom left hand corner of the window to the origin: 1 0 wx min P' 0 1 wy min P 0 0 0 Normalisation Transformations Normalisation Transformations Next apply a scaling to make the size of the window the same as the size of the viewport. If the x- and y- scale factors, sx and sy are v x max v x min sx wx max wx min sy v y max v y min wy max wy min Normalisation Transformations then the transformation becomes s x 0 0 1 0 wx min P' 0 s y 0 0 1 wy min P 0 0 1 0 0 0 Finally, apply a transformation so that a point at the origin is mapped onto the bottom left hand corner of the viewport: 1 0 v x min s x 0 0 1 0 wx min P' 0 1 v y min 0 s y 0 0 1 wy min P 0 0 0 0 0 1 0 0 0 Summary A transformation may be either an object transformation in which the points are transformed, or an axis transformation in which the co-ordinate axes are transformed and the object points expressed relative to the new axes. All of these transformations can be expressed in a 3x3 matrix which is multiplied with the vector for a point to obtain the co-ordinates of the transformed point. A 3x3 matrix is used to enable different transformations to be combined by multiplying the matrices together. After transformation we have the point (x’, y’, w’). The real-world 2D coordinates are obtained by dividing the x- and y- components by the wcomponent.