Force and Potential Energy
advertisement

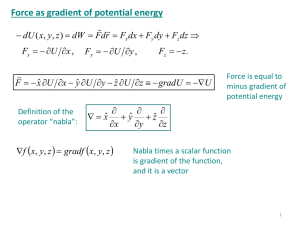
Physics 430: Lecture 8 Force and Potential Energy Dale E. Gary NJIT Physics Department 4.3 Forces as Gradient of PE We have seen that the potential energy U(r) corresponding to a force F(r) can be expressed as an integral of F(r). It should come as no surprise, then, that we can write F(r) as some kind of derivative of U(r), although we have to preserve the effect of the dot product in the integral, which turns the integral of F into a scalar. In other words, we need a derivative that turns the scalar U into a vector. A concept from vector calculus fills the bill—the gradient. Consider a particle acted on by a conservative force F(r), with corresponding potential energy U(r). The work done by F(r) in a small displacement from r to r + dr is: W (r r dr ) F dr Fx dx Fy dy Fz dz. On the other hand, from the definition of potential energy it is also W (r r dr) dU [U (r dr) U (r)] [U ( x dx, y dy, z dz ) U ( x, y, z )]. But from the definition of a derivative df f ( x dx) f ( x) df dx. dx September 23, 2010 Gradient of Potential Energy This suggests that we can write dU U ( x dx, y dy, z dz ) U ( x, y, z ) U U U dx dy dz, x y z where the derivatives of U are now partial derivatives with respect to x, y, z. [For example, U / x is the rate of change of U as x changes, keeping y and z fixed.] Equating the two alternative ways of writing W (r r dr ) F dr Fx dx Fy dy Fz dz , W (r r dr ) dU we have F xˆ U U U dx dy dz, x y z U U U yˆ zˆ U , where the operator xˆ yˆ zˆ x y z x y z is pronounced “grad.” It takes a scalar “field” such as U, and results in a vector pointing “uphill.” Note that the force, being U, points “downhill.” September 23, 2010 Scalar Fields A scalar field is just one where a quantity in “space” is represented by numbers, such as this temperature map. Here is another scalar field, height of a mountain. Contours far apart Contours close together Contours steeper flatter Side View September 23, 2010 Vector Fields A vector field is one where a quantity in “space” is represented by both magnitude and direction, i.e by vectors. The vector field bears a close relationship to the contours (lines of constant potential energy). The steeper the gradient, the larger the vectors. The gradient vectors point along the direction of steepest ascent. The force vectors (negative of the gradient) point along the direction of steepest descent, which is also perpendicular to the lines of constant potential energy. Imagine rain on the mountain. The vectors are also “streamlines.” Water running down the mountain will follow these streamlines. Side View September 23, 2010 Surface vs. Volume Vector Fields In the example of the mountain, note that these force vectors are only correct when the object is ON the surface. The actual force field anywhere other than the surface is everywhere downward (toward the center of the Earth. The surface creates a “normal force” everywhere normal (perpendicular) to the surface. The vector sum of these two forces is what we are showing on the contour plot. Side View September 23, 2010 Example 4.4: Finding F from U Statement of the problem: The potential energy of a certain particle is U = Axy2+B sin Cz, where A, B and C are constants. What is the corresponding force? Solution: Formally, the force is F U xˆ What we need, then, are the three partial derivatives, which we can write down by inspection: U U U 2 x U U U yˆ zˆ . x y z Ay ; y 2 Axy; z BC cos Cz. Plugging back into the equation for force, we have: F ( Ay 2 xˆ 2 Axy yˆ BC cos Cz zˆ ). September 23, 2010 4.4 The Second Condition that F be Conservative Last time we saw that the two conditions for a force to be conservative are Conditions for a Force to be Conservative A force F acting on a particle is conservative if and only if it satisfies two conditions: 1. F depends only on the particle’s position r (and not on the velocity v, or the time t, or any other variable); that is, F = F(r). 2. For any two points 1 and 2, the work W(1 2) done by F is the same for all paths between 1 and 2. It turns out that there is an easy way to check whether a force has the second property, using a concept from vector calculus. It can be shown via a theorem called Stokes’ Theorem (which you will have seen if you have had the vector calculus course) that a force has the desired property, that the work it does is independent of the path, if and only if F 0 everywhere. The quantity F is called the curl of F, or just “curl F,” or “del cross F.” It follows the usual rules for the cross product. September 23, 2010 Curl of F Two find the curl of a vector, you form the matrix and find its determinant: xˆ yˆ zˆ xˆ yˆ zˆ F det x y z x y z Fx Fy Fz Fx Fy Fz Fz Fy Fx Fz Fy Fx xˆ zˆ yˆ z z x x y y It may not be obvious that this being zero is equivalent to the condition that 2 1 F dr is path independent, but Stokes’ Theorem shows that it is. This gives a handy way to determine the path-independence property, as the following example shows. September 23, 2010 Example 4.5: Is the Coulomb Force Conservative? Statement of the problem: Consider the force F on a charge q due to a fixed charge Q at the origin. Show that it is conservative and find the corresponding potential energy U. Check that U F. Solution: kqQ F x Fz But r 3 Fy gz gy 3 3 z y r z r y x y z , so F x gz x 2 y 2 z 2 3 / 2 gy x 2 y 2 z 2 3 / 2 z y 2 2 2 3 / 2 g The Coulomb force is F 2 rˆ 3 r , where we have substituted g for the constant r r kqQ. Let’s find the curl of F, and see if it is zero. The x component is 3 ygz 3 zgy 0 5 5 r r The other two components work exactly the same, so the Coulomb force is conservative. September 23, 2010 Example 4.5, cont’d To find the potential energy, we write down the work integral r r ro ro U (r ) F dr g 1 r dr, r 3 where we are free to choose the path of integration (since we know the answer is path-independent). We should certainly choose a radial path, so that dr is in the direction r, so that r dr rdr. The integral then becomes trivial: U (r ) g r ro dr g g . r 2 r ro As usual, we have to choose a zero point for the potential energy. It is customary to choose U = 0 at r , in which case U (r ) U (r ) kqQ . r Please see this example in the text to see how to do the last step, showing that U F. September 23, 2010 4.5 Time-Dependent Potential Energy The text goes through a discussion of time-dependent potential energy using a specific example. However, I think it is sufficient to give the results of that discussion without going through the details. Consider a Coulomb force problem where the charge q is being acted on by a charge Q that is changing with time. In the example, the charge Q is leaking away due to interaction with air molecules. The gist of the argument is that if the potential energy is changing in this way, then the total mechanical energy T + U is not conserved. While T does not change, U slowly decreases to zero. In this circumstance, U = U(x,y,z,t), so the differential of U is U U U U dU ( x, y, z, t ) dx dy dz dt. x y z t Even when the first three terms can be expressed as the gradient of a scalar, the last term is manifestly not zero. Where does the energy go? It is lost into heating the air molecules. September 23, 2010 4.6 Linear One-Dimensional Systems The ability to express forces as the gradient of potential energy provides many advantages for certain problems. It is perhaps easiest to see these advantages by considering one-dimensional systems, and in fact onedimensional systems come up quite often, such as the problem of interaction of two gravitational bodies, or two charges. We will first consider “linear” systems, where the single dimension is, say, the x-axis, as in a cart on a track. However, we will see next time that we can also consider a roller-coaster as a one-dimensional system, even though the track curves through two (or even three) linear dimensions. In one dimension (we will use x), the potential energy is x U ( x) Fx ( x)dx. xo For example, if the force obeys Hooke’s Law, Fx(x) = kx, and if we choose xo = 0 as the reference point, then the potential energy is the familiar U ( x) 12 kx2 . dU Going the reverse direction, F U becomes Fx . dx September 23, 2010 Graph of Potential Energy-1 The fact that a conservative force is the gradient of the potential energy allows us to use a helpful analogy to understand the relationships. All we need do is graph the potential energy (U(x) in this case), and we get a “rollercoaster” plot like the one below in which we can use our intuition to see how an object will behave. U(x) Fx Fx x x1 x2 x3 x4 In this plot, as on a rollercoaster, the force on an object at any point is equal to the “downhill” slope (gradient) of the potential energy. You can see that at the point x1, the force is to the left (the slope is positive, so U is negative), while at the point x2 it is to the right. At points x3 and x4 the slope is zero, so the force is zero. September 23, 2010 Graph of Potential Energy-2 This may seem too obvious in the case of a rollercoaster, but it is also true of other conservative forces such as the spring force or the electric force. The graph of potential energy allows us to visualize the way the forces work and objects behave. For instance, you can certainly see that if you place an object near the point x3, it will be stable. On the other hand, U(x) if you place an object at the point x4, Fx Fx even though the force is zero there, a small displacement will cause it to move away from that point, hence the position x x4 x1 x3 is unstable. x2 The condition for a position to be stable or unstable is found from the curvature d2U/dx2 at the point. If the curvature is upward (d2U/dx2 > 0) and dU/dx = 0 (a minimum in U(x)), then the position is stable. If the curvature is downward (d2U/dx2 < 0) and dU/dx = 0 (a maximum in U(x)), then it is unstable. September 23, 2010 Graph of Potential Energy-3 We can also subtly change the graph by plotting the total energy on the vertical axis. Since the mechanical energy E = T + U is conserved, E is represented by a horizontal line as shown on the plot, while U(x) is the curve. Note that when the object is at position energy Can the object reach here? a, we have E = T + U = U, so the KE, T, How about here? of the object at that point must be zero. E Such a point is called a turning point, since the object moves up to that point x and then reverses direction. a b c When the object moves to point b, still with total energy E = T + U, it follows that, since U is a minimum there, T must be a maximum. The object is moving at its greatest speed at this point. When the object reaches point c, since the total energy is higher than the U(x) curve, the object has non-zero KE and moves on past this point. It actually speeds up past point c, and moves off the graph to the right. September 23, 2010 Graph of Potential Energy-4 The graph below is the potential energy as a function of radius for a negatively charged ion such as Cl (Chlorine). A positive ion such as H+ makes a bond by being trapped in the “potential well” formed by the Cl ion. If the H+ ion has too much kinetic energy, energy the total energy is positive and the H+ ion will escape (not be bound). a E>0 However, if the H+ ion has low enough kinetic energy, the total energy will be negative and the H+ ion will be bound. d b E<0 It will then oscillate between turning points b and d. In its minimum energy state, it c will have total energy equal to the potential energy at point c, and it will remain in equilibrium at point c. We will see in chapter 8 that this is the same shape as the radial potential energy for a planet orbiting a star. September 23, 2010 r Complete Solution for the Motion Although it is not generally true in three dimensions, when we have a onedimensional potential energy U(x), we can determine the complete solution for the motion. This is because, since E = constant (with a value determined by initial conditions), when U(x) is known we can solve for T(x) = E U(x). Since T(x) = ½ mv2, we can easily solve for v: 2 E U ( x) . m dx Since x , we can write this in separated variable form dt dx m dx dt , x 2 E U ( x) or, m x dx t . 2 0 E U ( x) x ( x) Provided we can do the integral (and we can always at least do it numerically), it gives t as a function of x, which we can invert to get x(t). September 23, 2010 Example 4.6: Free Fall As a simple example: I drop a stone from the top of a tower at time t = 0. Use conservation of energy to find the stone’s position x (measured down from the top of the tower, where x = 0) as a function of t. Neglect air resistance. Solution: The potential energy of the stone is U ( x) mgx. The total energy has to be constant, and we take U(x) = 0 at x = 0, where the stone is dropped from rest, so it also has zero kinetic energy there. Hence, E = 0 always. We can then solve for t: t x m x dx dx 2x . 0 0 2 g mgx 2 gx From the answer, we can easily invert to get x vs. t: x 12 gt 2 . Although this is a simple problem, you can use the same technique for any potential energy function. September 23, 2010