CAGD: Design of curves, Splines & NURBS
advertisement

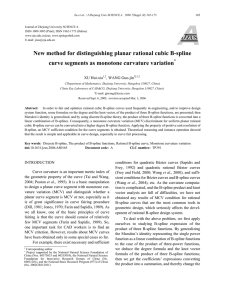
CAGD: Design of curves Splines & NURBS Alexander Lauser Ferienakademie Sarntal 2004 Agenda Motivation Polynomial Interpolation Bézier curves Splines Smoothness B-Splines Rational Bézier curves NURBS Why designing curves? Many technological applications Design of products (e.g. CAD) Calculation of the path for a robot Design of fonts Large sized fonts must be smooth Interpolating measuring data Approximating measuring data Criterias for curves Controllability Locality Changes must be predictable in effect Intuitive to use for the designer Local changes should stay local Smoothness No sharp bends Polynomial interpolation Several conditions (say n+1) For example: n+1 Points n n 1 a1 x a0 Apply to y a n x a n 1 x Solve system of linear equations Either effective or if you like to, even efficent Result: Polynomial of degree n Interpolates points by construction (i.e. the curve goes through these points) Polynomial interpolation Disadvantages Very bad locality Bad controllability Tend to oscillate Small changes may result in catastrophe All you know is, that it interpolates the points High effort to evaluate curve Imagine a curve with several million given points Approximation Unlike interpolation the points are not necessarily interpolated Points give a means for controlling of where the curve goes Often used when creating the design of new (i.e. non-existing) things No strict shape is given Bézier curves Bézier curve Now we are no longer interested in interpolating all points The curve only approximates a set of points Bézier curves are a simple, yet good method Given: n+1 control points b0 , , bn Bézier – definition n Bi t n Bi t Via Bernstein polynomials of degree n n 1 t n i t i , i 0, i 0, i 0, n , t 0,1 Characteristics Nonnegative Sum to union n ,t 0, 1 Bernstein polynomials of degree 4 n n Bi t i 0 1, t Bézier – mathematical Definition of Bézier curve: n n x t : bi Bi t with t 0,1 i 0 Bernstein polynomials are like „crossfaders“ to the points They are the weights in a weighted linear combination Bézier – derivation d n B t dt i Derivation of Bernstein polynomial d n dt i n i it 1 t i 1 n i 1 t n i n! ti i 1 ! n i ! n ti 1 n 1! ti i 1 ! n i ! n 1 1 n Bi t n 1 Bi t i n i t 1 t 1 t 1 n i 1 t n i 1 product rule n! ti 1 t i! n i 1 ! n i n i 1 n 1 ! ti 1 t i! n i 1 ! n i 1 Bézier – derivation d x t dt Derivation of Bézier d dt n n n i bi B t i 0 i n bi B t n 1 n i 1 n 1 b i Bi bi 1 Bi bi Bi t t with B b i Bi t n 1 1 t Indexshift i 0 n 1 bi i 0 n 1 Bi t i 0 n 1 n i 0 n t i 0 n 1 n 1 n n 1 1 n n 1 n 1 i 1 n n d n bi Bi t dt 0 n 1 1 bi Bi t Joined sums n 1 0 Bn t 0 Bézier – construction Repeated linear interpolation P1 0,5 0,5 0,5 P2 0,5 P0 t = 0,5 P3 Bézier – characteristics Good controllability Interpolates endpoints (s(0) = b0, s(1) = b1) First two points determine the tangent vector at the start: x 0 n b 1 b0 Last two points determine the tangent vector at the end: x 1 n b b n n 1 Good locality Local changes only have local impact Anyway changes are global Bézier – characteristics Lies within the convex closure of the control points Invariant under affine transformation Useful for collision detection You can rotate, translate and scale the control polygon Complex shape of model implies a great amount of control points This means the degree of the curve is high So the evaluation of such a curve is slow Splines Modelling segmental Splines Piecewise polynomial segments Modelling the curve locally by a segment The segments are joined to get the global curve Name derives from shipbuilding Splines are stripes of metal fixed at several points. They have the same smoothness as cubic B-Splines Global parameter u and for each segment si a local parameter t Splines – parametrisation Globally parametrised over a sequence of nodes ui Each segment si is locally parametrised over [ui, ui+1] Splines – parametrisation Uniform splines Nonuniform splines Uniformly distributed sequence over range of global parameter u Sequence is not uniformly distributed Segments si „live“ over [ui, ui+1] with local parameter t = (u – ui) / (ui+1 – ui–1) Splines – smoothness What does smoothness mean? Graphically clear: No sharp bends Mathematical abstraction: Order of continuous derivability Only nodes and the corresponding knotpoints are relevant others points are infinitely often derivable Splines – smoothness C0-continuity C1-continuity The segments meet at the nodes Curve must be continuously derivable after the global parameter u one time The „speed“ in respect to global parameter must be the same in the joint both segments C2-continuity Curve must be continuously derivable 2 times The „acceleration“ must be equal in the joint Splines – smoothness C1-continuous Spline C0-continuous Spline Splines – smoothness Geometric smoothness: G1-continuity In every joint there exists a unique tangent I.e. tangent vectors need not be equal in magnitude, only direction Doesn‘t take global parametrisation into account Splines – smoothness An example for G1-continuous curve that is not C1-continuous 1 u0 2 u1 1 u2 1 Splines – smoothness In general Cx-continuity Gx-continuity But not: Gx-Continuity Cx-continuity Special case: Stationary point All derivations are zero Then Cx-continuity Gx-continuity doesn‘t hold Splines – smoothness Linear Interpolation Why not interpolate the points linearily? It is very controllable It is very local since it changes only 2 segments Right. BUT It is not very smooth It is only C0-continuous P2 P1 P4 P3 B-Splines Spline consisting of Bézier curves Depending on the degree n of the Bézier segments various orders of continuity possible In general up to Cn–1-continuouity possible Bézier: Tangents B-Splines – C1-continuity C1-continuity at knot bi Tangent vectors must be equal Bézier: Tangent vectors in bi s0 - points from bi-1 to bi s1 - points from bi to bi+1 This means bi-1, bi and bi+1 must be collinear bi-1 bi+1 bi s0 s1 B-Spline: Collinearity of bi-1, bi and bi+1 B-Splines – C1-continuity But this alone isn‘t sufficient bi bi bi 1 Furthermore bi-1, bi and bi+1 must satisfy a specific ratio 1 u1 u0 bi u2 u 1 =: 0 1 u0 bi bi bi 1 1 bi 1 (for uniform B-Splines) 1 Why this? u1 u2 B-Splines – C1-continuity Because we are interested in derivability for the global parameter d s u du Collinearity says that the „speed“ has the same direction, but not necessarily magnitude Mathematical derivation d d t u sj t du dt So we have to check 1 bn b n 1 0 1 d s j t , with j dt 1 d s0 1 dt 0 bn 1 b n , since j uj 1 u j,t u u uj ,u u j, uj j 1 d s1 0 dt 1 d s0 1 dt n bn b n 1 and s 1 0 n bn 1 bn 1 B-Splines – C1-continuity Given: Two Bézier curves How to test C1-continuity Consider the joint points of the spline and its direct neighbours Are they collinear? When no joint it isn‘t even C0-continuous No, then the spline is not C1-continuous Ok, they are collinear Then check the ratio of the distance from the knot point neighbours to the knot point. It must be same ratio as of the corresponding nodes B-Splines – C2-continuity C2-continuity at knot bi Precondition: C1-continuity Nodes bn-2, bn-1, bn and bn, bn+1, bn+2 must describe a unique global quadratic Bézier curve So there must exist a (unique) point d, so that bn-2, d, bn+2 describe this curve B-Splines – C2-continuity The point d must fulfill two conditions bn bn 1 1 1 t bn 2 t d 1 t d t bn 2 u0 0 at which t 0 u1 u2 1 B-Splines How to test for C2-continuity First of all test for C1-continuity If it is not, it cannot be C2-continuous Check for uniqueness of point d Extrapolate d- from bn-2 and bn-1 Extrapolate d+ from bn+2 and bn+1 d- and d+ must be equal u0 u1 u2 In Practice specify a tolerance Quadratic B-Splines Construction of a C1-continuous quadratic B-Spline Different approach Per definition we want a C1-continuous curve We do not want to test two segments for C1-continuity anymore Given are n+1 control points d0 ,..., dn spanning the control polygon of the B-Spline Constructing Bézier control points for a C1-continuous quadratic B-Spline Quadratic B-Splines Construction of Bézier polygon: b0 : d 0 b2 n b2 i : i i 1 b2 i i 1 b1 = d1 b0 = d0 b2 i 1 i i 1 0,5 0,5 b 2 i 1 : d i , i 0, : dn 2 ,n 3 b2i 1 i 1 b 2 2i b 3 = d2 1 1 b 2 2i 1 For uniform B-Splines b6 = d4 b2 b4 Quadratic Bézier segments b5 = d3 Control polygon Construction of a uniform quadratic C1-continuous B-Spline with n=5 Cubic B-Splines Construction of a C2-continuous cubic BSpline As for quadratic B-Splines we construct the Bézier control points bi from the B-Spline polygon spanned by di Given are n+1 control points d0 ,..., dn again spanning the control polygon of the B-Spline Constructing Bézier control points for a C2-continuous cubic B-Spline d4= b8 b7 Cubic B-Splines b9 = d5 d3 b6 Formulas for uniform case (nonuniform version is too ugly ;) Left end: b0 : d 0 , b1 : d 1 , b2 : Right end: b3 n 2 b3 i 2 : di 1 3 1 b3 i 1 : di 1 3 1 b3 i : b 2 3i 1 Cubic Bézier segments b5 1 1 d1 d2 2 2 1 1 : d , b : d , b : d dn 2 n 3 n 2 1 n 1 3 n 2 2 n 2 2 2 1 di 3 2 b0 = d0 di 3 1 b 3 i 1 (Remember C 1 -condition) 2 b1 = d1 b4 1 b3 d2 b2 B-Spline polygon Construction of a uniform C2-continuous cubic B-Spline Cubic B-Splines – storage A little off-topic aspect: How to store a B-Spline For example it could be approximated linearly and these linear segments could be saved All Bézier control points could be saved Obviously inefficient It‘s more efficient but not perfect So what to save? Answer: Only the di need to be saved Curve can be reconstructed as shown before Cubic B-Splines – storage The advantages are obvious No loss of data. The curve can be exactly reconstructed No problems with rounding errors Little storage space needed The storage is distinct when low-level storage information is known Theoretical interchangability of file format saving B-Splines Practice is evidently different B-Splines – basis What does the „B“ in the name stand for? It does not stand for „Bézier“ as you may guess, but for „Basis“ Since there exists a basis representation for the spline in contrary to natural splines The basis functions are called the minimum support splines B-Splines – basis Definition of B-Splines via basis splines N n 1 n s u : n d i N i u , where N i u are the basis splines i 0 Definition of the basis splines Global over the whole domain of u n So that N i ui 1 Cn-1-smoothness is assured The support is minimal That is the range in which it doesn‘t vanish B-Spline Basis Ok but how does this look like? The basis splines over the full domain of u B-Splines – characteristics Invariant under affine transformations You can scale, rotate and translate the curve I.e. the control points and get the same result as doing so with all the points on the curve Interpolation of end points Excellent locality Change of one control points affects at most n+1 segments B-Splines – characteristics Lies within convex closure of the control points d7 Stricter than for Bézier curve: Lies within the the union of the convex closures of all segments d0 d1 Convex closure d2 A C1-continuous quadratic B-Spline d6 B-Splines – characteristics Modelling of straight lines possible Even if all local segments are planar, modelling of true 3D curves is possible E.g. quadratic B-Splines are planar in each segment but the global curve may be true 3D The degree of the global curve doesn‘t depend on the number of points Efficient for modelling curves with many points Rational Bézier curves An even more powerful approach Rational Bézier curves One major disadvantage of Bézier curves are that they are not invariant under projection This means when perspectively projecting a 3D Bézier curve on the screen the result is no longer a Bézier curve For CAGD applications 3D curves are often projected to be displayed on 2D screens When projected, the original nonrational curve results in a rational curve This leads us to rational Bézier curves They are invariant under projective transformation Rational Bézier curves Definition of a rational Bézier curve n n w i bi B i t x t : i 0 n n i wi B t i 0 As before the bi are the control points Additionaly every point bi has a weight wi Rational Bézier curves You can think of a rational Bézier curve of the projection of a nonrational one from 4D space to the hyper-plane w=1 The control polyhedron of this is spanned by the 4D points (bi . wi , wi) The bi are the projection of the bi .wi to the hyperplane w=1 Rational Bézier curves Let‘s visualize this for a 2D rational Bézier curve as a projected Bézier curve in 3D to plane z=1 z=1 plane 3D Bézier curve 2D rational Bézier curve Rational Bézier curves The weights give a further degree of liberty to the designer Changing the weight differs from moving the control point Moving a control point (left) differs heavily from changing its weight (right) Rational Bézier curves Because they are invariant under projection the projected curve can be modeled further E.g. a car designer may change the projected car body Bézier curves are a subset of the rational Bézier curves Special case: Equal weights NURBS Puzzeling with rational curves NURBS Non Uniform Rational B-Splines B-Splines with rational Bézier curves Since 3D rational Bézier curves can be thought of as nonrational in 4D, all results of normal BSplines apply Especially the continuity conditions are exactly identical, but with 4D control points This implies that their construction is mathematical identical to that of B-Splines (but as well in 4D) NURBS Note: NURBS can be defined as well as BSplines with Basis Splines N n 1 n i w i bi N t x t : i 0 N n 1 n i wi N t i 0 NURBS – characteristics All conic sections (a circle for example) can be modelled exactly Constructing a 2D-circle with NURBS NURBS – characteristics It inherits all advantages of B-Splines (excellent locality, ...) while extending the liberty of modelling Therefore today NURBS are standard for modelling The next logical step is to model not only curves but surfaces This will be discussed in the next lecture The End Programming is a race between the programmer and the universe: The programmer trying to make the programm more and more foolproof and the universe trying to make greater idiots – so far the universe won. Questions? Thank you for paying attention Sources Farin, G.: Kurven und Flächen im Computer Aided Geometric Design H.-J. Bungartz, M. Griebel, C. Zenger: Einführung in die Computergraphik Foley, van Dam, Feiner, Hughes: Computer Graphics: Principles and Practice - Second Edition in C http://olli.informatik.uni-oldenburg.de/Grafiti3/grafiti/flow10/page1.html http://www.cs.berkeley.edu/~sequin/CS284/IMGS/ http://escience.anu.edu.au/lecture/cg/Spline/bSplineFunction.en.html -- Unkown source