Safe Testing of Autonomy in Complex, Interactive Environments
advertisement

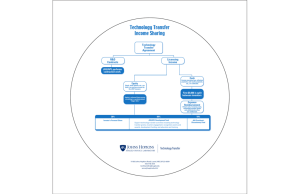
Flight Software Workshop December 16 – 18 2014 Safe Testing of Autonomy in Complex, Interactive Environments (TACE) David Scheidt david.scheidt@jhuapl.edu Robert Lutz robert.lutz@jhuapl.edu William D’Amico bill.damico@jhuapl.edu Subodh Harmalkar subodh.harmalkar@jhuapl.edu Outline Test & Evaluation Need and Challenges Background and Definitions Current Effort under TRMC’s T&E/S&T program Path to a Testing Capability Summary From Tele to Auto to Autonomous Operations Autonomous Operations Operating environmental decisions Measure effect Measure effect APL has demonstrated the autonomous operation of multiple and cooperative UXVs where the operator is a “user-on-the-loop” There have been many demonstrations of APL’s Mission Level Autonomy (MLA) under JHU/APL internal research and at Camp Roberts (CA) UXV Sensor Unmanned systems usually require the operator to be a “user-in-the-loop” Control Operational objectives MLA has been shown to be “platform” and “vendor” agnostic riding above proprietary control/guidance algorithms MLA research led to insights on what would be needed for rigorous test and evaluation A measure of effectiveness of an autonomous system is directly related to “operational objectives” thus making the test methodology and test results applicable to both developmental and operational test environments – true joint DT/OT is needed Systems with Autonomous Behaviors Are Here AACUS: Autonomous Aerial Cargo/Utility System ACTUV: ANTI-SUBMARINE WARFARE CONTINUOUS TRAIL UNMANNED VESSEL LDUUV: Large Diameter UUV AMAS: Autonomous Mobility Appliqué System Autonomy Test & Evaluation Challenge Autonomous systems respond to unpredictable change by devising a course of action. Before we deploy such systems how can we be sure that autonomous decisions that will be produced will always: (1) achieve objectives set by human supervisors and (2) not produce unacceptable unintended consequences. Testing autonomous systems is particularly challenging since we cannot possibly test all interactions between the autonomous system and the natural world. JHU/APL Proprietary History of Autonomous Unmanned Systems at APL 4 UGVs @ APG JHU/APL has been developing autonomous unmanned vehicles since 1962. OPISR – 4 UAVs, 1 UGV, 2 USV, 1 UUV, 3 UGS Tactical Sensing 1 UAV & Multiple UGS @ Webster Predator/SSN Interoperability Demo 2 UAVs & 4 UGVs 1 UAV 1 UGS @ APG New Horizons Unmanned Surface Vehicles Air-Exjam (later EXDRONE and BMQ-147 Dragon) 1965 1970 @ APG 1990 2000 Autonomy S&T Vision Program 2005 2010 2015 TACE DADFS 3 UAVs, 2 UGS, 3 Mobile Users @ Dugway & DOE Range Agile UxV Autonomy 1 UUV TNT Experiments 6 UAVs, 3 UGS Scheer “Beast” DARPA UUV Program Small Oceangoing USVs NEAR burn failure Since 2002 JHU/APL has conducted dozens of autonomous vehicle flight programs and flown/launched hundreds of sorties. Currently JHU/APL has 24 active autonomy programs. @ Camp Roberts In Atlantic, Pacific & Gulf of Mexico Combined Autonomous Air/Ground Missions 2004 Aberdeen Test Center OSD NII Swarming Unmanned Vehicle Experiment – Cooperative Search, Patrol & Track (4 UGVs and 2 UAV) Combinations of autonomous air and ground vehicles (an AACUS/AMAS collaboration) are clearly possible and probably required for many military missions Challenges for Autonomous System Test • Test & Evaluation (T&E) Need - Build an infrastructure for SAFE/LIVE testing of autonomous unmanned vehicles (AUVs), especially for tactical UAVs that have significant airspace and platformrelated range safety issues - Demonstrate live, virtual, and constructive (LVC) methods for SAFE/LIVE tests - LVC methods should be Test and Training Network Architecture (TENA) compliant - To our knowledge there are no AUV established T&E capabilities with these features • T&E Challenge – Provide an infrastructure that supports safe testing when testing autonomous systems operating over the horizon or in denied environments. – Provide an infrastructure that supports safe testing when autonomous systems perform unpredictable actions – Provide an accurate, real-time, live-virtual-constructive environment that interacts with the system under test’s autonomy in unpredictable ways. – Reliable command and control (C2) of the systems under test (SUT) and robust 2-way data links are needed to stimulate the SUT, to record behaviors, and to maintain SAFE/LIVE test control Safe Testing of Autonomy in Complex, Interactive Environments (TACE) – Key Elements Capability TACE is a 3-phase/36-month program (started in April 2013) where the open/general architecture will be at TRL6 with initial capabilities for the testing (black and white box) of autonomous unmanned vehicles (AUVs) of all types. TACE is “portable” but will rely upon a “thin client” interface to the SUT and the inclusion on the SUT of a minimal “TACE test applique.” There are 3 levels of control/override within TACE: SUT autonomy, TACE automatic experiment controls, test range safety officer control Relevance to T&E Scenarios The TACE architecture will use rigorous techniques to prevent unsafe AUV operations or actions while stimulating, measuring, monitoring, and recording the AUV’s autonomous response/performance in complex environments. TACE assurance algorithms provide mathematically rigorous, on-board, real-time, safety guarantees, while TACE dual simulation system provides a complex live-virtual constructive test environment. Cost Benefits A critical element, as always, is selecting the critical tests. TACE is not a planning tool. A recent award was made to JHU/APL under the Unmanned and Autonomous System Test (UAST) program for an autonomy planning tool, Rapid Adversarial Planning Tool (RAPT). The “cost” of conducting tests where the “Achilles heel” of the embedded autonomous behavior is unknown would involve very high risk to the loss of the SUT and the delay of system fielding. The combination of tools such as RAPT and TACE should prevent unnecessary and expensive testing TACE System Architecture TACE Internal Messages over ZeroMQ TCP/IP Socket TACE Year 1-2 Sensor Middleware SUT Comms TENA over TCP/IP Socket SUT TACE External Messages over JUAS? Stimulator BIT Middleware TACE Year 3 TACE GNC Autopilot Middleware Non-TACE Components Watchdog Autonomy Middleware SUT Communication Server SUT Ground Stations SensorModel Model Sensor Sensor Model Synthetic Force Generator SIMDIS Test Data DB Streaming Reliable Communication Model Ground Communication Server Blackbox Monitor Whitebox Monitor TENA Datalogger TACE TACE TENA TENA Execution Execution TENA to TENA Bridge R/W Test Config DB TestExecutive Executive Test TACEClient Test Client Client (User Interface) (UserInterface) Interface) (User TACE Test Executive Watchdog Manager Server Watchdog Manager Client (User Interface) LVC LVC LVC External External TENA TENA Execution Execution R/W Test Result DB R R/W Safety Constraint DB LVC LVC LVC TACE System Under Test (SUT )Payload TACE’s payload for the Boeing ScanEagle is a repurposing of JHU/APL’s Autonomy Toolkit (ATK) software, which has been used on more than a dozen types of UAVs in Boeing, Lockheed, Aerovironment manufactured vehicles, and hardware previously developed jointly under internal research funds by Boeing and JHU/APL TACE SUT payload installed in a Boeing ScanEagle payload bay ATK payload with Persistent Systems Wave Relay Wireless Local Area Network Card TACE Flight Tests at Aberdeen Test Center Five Test Events with Multiple Sorties Were Executed during January/February 2014 APL Test Team on the tarmac at Phillips Army Airfield (PAAF) Aberdeen Test Center (ATC) Hand launch of the Procerus research AUV controlled by JHU/APL’s Autonomy Tool Kit (ATK) Sample Results from TACE Testing at ATC SUT Moving NoGo Virtual Target Safe Loiter Point Fixed NoGo Area Constraint Violation - Range Safety Executive User Interface Path to a Testing Capability – Phase 2 OV1 Restricted Airspace(s) ScanEagle as the SUT at Yuma Test Center Virtual JIMM Entities 1 to N Watchdog Behaviors 3D Range Boundaries Platform Safety Limits Virtual Translated Air Traffic Live Unicorn UAV ScanEagle SUT-System Under Test Tactical EO/IR Autonomous Behaviors Search, Track, Avoid Onboard Test Payload Unicorn UAV Wave Relay 2400MHz Test Range Topology UHF PNT Downlink UHF Safety Link Intruder C2 Intruder GS Native UHF Link Test Director Land Lines Test Ground Station Range Safety Defense Research & Engineering Network Connection Live target track to SUT Notional Playbox at a Large Test Range 1.0 Mile Geographic Constraint Boundaries 10 Miles Flight Test Operations Base 7.5 Miles 2.5 Miles 1.0 Mile 2.0 Miles 1.0 Mile Note: paths shown are not actual paths) Proximity Violation (Virtual Entity) Violation Track Established Virtual Aircraft Live Ground Entity Summary for Autonomy and T&E Perspectives TACE Phase 3 will provide some basic operational functions at TRL 6 – this is an “initial architecture” but not a “range capability” To our knowledge, there are no “active” programs to extend beyond TRL6 – highly understandable since there are no PORs with autonomous behaviors At the recent NDIA Annual T&E conference – SHIFT LEFT is coming RFPs will include CONOPS and initial TEMPs - will “autonomy” be a “shift left” – Insights from Dr. Brown, Director TRMC - cited “cyber, big data, hypersonic, and autonomy” as the T&E challenge areas for the near future The NATO Science and Technology Organization (STO) promotes and ... Validation and Verification of Autonomous Systems (SCI-274) Acknowledgements • JHU/APL TACE Team: Robert Chalmers, Robert Bamberger, Kristine Ramachandran, Dean Kleissas, Brendan John, Subodh Harmalkar, William Van Besien, Michael Biggins • TACE Subcontractors to JHU/APL : – Trideum: Michael O’Connor – Boeing Corporation: Gabriel Santander – InSitu Inc.: Jerry McWithey • Government Flight Test Support: – Aberdeen Test Center: John Wiley – Yuma Test Center: Mary Beth Weaver and Bob Vondell • Unmanned and Autonomous Systems Test Test Technology Area – Executive Agent: Vernon Panei – Deputy Executive Agent: Stephanie Riddle – Subject Matter Experts: William Hamel, Kirk Bonnevier