Rotational Motion 2015
advertisement

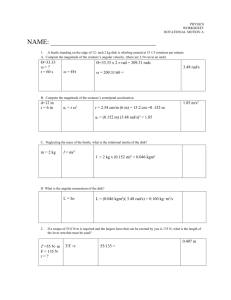
Rotational Kinematics – its just like linear kinematics except stuff spins instead of going in a straight line… Rotational Displacement, Consider a disk that rotates from A to B: B Angular displacement : A Measured in revolutions, degrees, or radians. 1 rev = 360 0 = 2 rad The best measure for rotation of rigid bodies is the radian. Definition of the Radian One radian is the angle subtended at the center of a circle by an arc length s equal to the radius R of the circle. s R s Example 1 A rope is wrapped many times around a drum of radius 50 cm. How many revolutions of the drum are required to raise a bucket to a height of 20 m? s 20 m R 0.50 m = 40 rad R Now, 1 rev = 2 rad 1 rev 40 rad 2 rad = 6.37 rev h = 20 m Example 2 A bicycle tire has a radius of 25 cm. If the wheel makes 400 rev, how far will the bike have traveled? 2 rad 400 rev 1 rev = 2513 rad s = R = 2513 rad (0.25 m) s = 628 m Angular Velocity Angular velocity,w, is the rate of change in angular displacement. (radians per second.) w t Angular velocity in rad/s. Angular velocity can also be given as the frequency of revolution, f (rev/s or rpm): w 2f Angular frequency f (rev/s). Example 3 A rope is wrapped many times around a drum of radius 20 cm. What is the angular velocity of the drum if it lifts the bucket to 10 m in 5 s? s 10 m R 0.20 m w t = 50 rad R 50 rad 5s h = 10 m w = 10.0 rad/s Those Oversized Tires! If you drive a vehicle with oversize tires, how is the speedometer affected? Those Oversized Tires! • The use of oversized tires has an impact on the speedometer reading. Your vehicle is actually covering greater distance due to the larger circumference of the oversized tires. Your speedometer was calibrated for the smaller tires sold on the vehicle so your speedometer is reading less speed and you are moving faster. If your tires are 10% larger than the original tires on your truck you travel 10% more than your truck recognizes. This has two effects: Your actual speed is 10% MORE than what your speedometer is reflecting. (When your speedometer reads 60, you are actually traveling 66) 10=11, 40=44, 100=110 etc. Your actual mileage is 10% MORE than what your odometer is reflecting. (When your odometer reads 100 miles, you have actually traveled 110 miles.) Example 4 In the previous example, what is the frequency of revolution for the drum? Recall that w = 10.0 rad/s. w w 2 f or f 2 10.0 rad/s f 1.59 rev/s 2 rad/rev R Or, since 60 s = 1 min: rev 60 s rev f 1.59 95.5 s 1 min min f = 95.5 rpm h = 10 m Angular Acceleration Angular acceleration is the rate of change in angular velocity. (Radians per sec per sec.) w t 2 Angular acceleration (rad/s ) The angular acceleration can also be found from the change in frequency, as follows: 2 (f ) t Since w 2 f Example 5 The block is lifted from rest until the angular velocity of the drum is 16 rad/s after a time of 4 s. What is the average angular acceleration? w f wo t 0 or wf R t 16 rad/s rad 4.00 2 4s s h = 20 m = 4.00 rad/s2 Angular and Linear Speed From the definition of angular displacement: s = R Linear vs. angular displacement s R v t t t R v=wR Linear speed = angular speed x radius Angular and Linear Acceleration: From the velocity relationship we have: v = wR Linear vs. angular velocity v Δω∙R v R Δω v va R t t t a = R Linear accel. = angular accel. x radius Example 6: Consider flat rotating disk: wo = 0; wf = 20 rad/s t=4s What is final linear speed at points A and B? vAf = wAf R1 = (20 rad/s)(0.2 m); vBf = wBf R2 = (20 rad/s)(0.4 m); R2 R1 B A R1 = 20 cm R2 = 40 cm vAf = 4 m/s vBf = 8 m/s Acceleration Example 7 Consider flat rotating disk: R1 A B wo = 0; wf = 20 rad/s t=4s What is the average angular and linear acceleration at B? w f w0 t 20 rad/s 4s a = R = (5 rad/s2)(0.4 m) R2 R1 = 20 cm R2 = 40 cm = 5.00 rad/s2 a = 2.00 m/s2 Angular vs. Linear Parameters Recall the definition of linear acceleration a from kinematics. a v f v0 t But, a = R and v = wR, so that we may write: a v f v0 t becomes R Angular acceleration is the time rate of change in angular velocity. Rw f Rw 0 t w f w0 t Trains ride on a pair of tracks. For straight-line motion, both tracks are the same lengths. But which track is longer for a curve, the one on the outside or the one on the inside of the curve? The outside track is longer, just as a circle with a greater radius has a longer circumference A Comparison: Linear vs. Angular w f wo t v f vo at sd v0t at 1 2 2asd v v 2 f 2 0 2 w 0t t 1 2 2 2 w w 2 f 2 0 Linear Example: A car traveling initially at 20 m/s comes to a stop in a distance of 100 m. What was the acceleration? V0 = 20m/s d = 100 m Vf = 0 m/s 100 m Select Equation: 2as v2f v02 a= 0 - vo2 2s vo = 20 m/s vf = 0 m/s -(20 m/s)2 = 2(100 m) a = -2.00 m/s2 Example 8: A disk (R = 50 cm), rotating at 600 rev/min comes to a stop after making 50 rev. What is the acceleration? Select Equation: 2 2 2 w f w0 wo = 600 rpm wf = 0 rpm rev 2 rad 1 min 600 62.8 rad/s min 1 rev 60 s = 0 - wo2 2 -(62.8 rad/s)2 = 2(314 rad) = 50 rev 50 rev = 314 rad = -6.29 rad/s2 Problem Solving Strategy: Draw and label sketch of problem. Indicate + direction of rotation. List givens and state what is to be found. Given: ____, _____, _____ (,wo,wf,,t) Find: ____, _____ Select equation containing one and not the other of the unknown quantities, and solve for the unknown. Example 9 A drum is rotating clockwise initially at 100 rpm and undergoes a constant counterclockwise acceleration of 3 rad/s2 for 2 s. What is the angular displacement? Given: wo = -100 rpm; t = 2 s = +3 rad/s2 rev 1 min 2 rad 100 10.5 rad/s min 60 s 1 rev w ot 12 t 2 (10.5)(2) 12 (3)(2) 2 = -20.9 rad + 6 rad = -14.9 rad Net displacement is clockwise (-) R Bet you can’t Center of gravity or Center of mass is the point at the center of an object’s weight distribution, where the force of gravity can be considered to act. If the Center of Mass is NOT supported, an object will topple. A Force that cause rotation about an axis is TORQUE Pushing on a door is an example of a force that causes rotation. TORQUE The pivot is in the hinges and the force needed to cause it to rotate is dependent on … 1) the amount of force 2) the angle of the force 3) the distance from the pivot Torque = Forceperpendicular x lever arm = F r Units = N.m The same torque can be produced by a large force with a short lever arm, or a small force with a long lever arm. Picture of lever arms from page 151 Although the magnitudes of the applied forces are the same, the torques are different. Only the component of forces perpendicular to the lever arm contribute to torque. Let’s go back to the door If the force is perpendicular then the lever arm (r) is the distance from the force to the pivot. If the force is along the arm then, no rotation occurs so no torque. If you apply the force at an angle, then the lever arm will be smaller and the torque less. So how can we use this… Say the bolt is too tight and you can’t get it to turn, what can you do? Example 10: What torque is necessary to lift a 10 N dumbbell by your muscles 0.80 m away? F = 10 N r = 0.80m = F r = 10 N x 0.80 m = 8 Nm Let’s review Equilibrium The condition of equilibrium exists where the resultant of all external forces is zero. We have used this relationship to solve problem where the objects were stationary or at rest. First Condition of Equilibrium: A body is in translational equilibrium if and only if the vector sum of the forces acting upon it is zero. Σ Fx = 0 and Σ Fy = 0 Second Condition of Equilibrium: An object is in rotational equilibrium when the sum of the forces and torques acting on it is zero. Στ=0 By choosing the axis of rotation at the point of application of an unknown force, problems may be simplified. We will solve torque problems by using the idea that the clockwise torque balances the counterclockwise torque when an object is in rotational equilibrium. Clockwise Torque Counterclockwise Torque = 0 clockwise = counterclockwise Example 11: The 60 kg diver is standing 1.20 m from the pivot. What force must be exerted by the bolt 0.80 m away from the pivot? Assume the board is supported at its center of mass. r cw = 1.2 m r ccw = 0.8 m F cw = 600 N Fccw = ?? 0.8 m counterclockwise = clockwise Fr ccw = Fr cw F (0.80 m) = (600 N)(1.20 m) F = 900 N 1.20 m Example 12: What is the mass required to balance this system? Example 13: A uniform beam weighing 200 N is held up by two supports A and B. Given the distances and forces listed find the forces exerted by the supports. The dumbells below are all the same size, and the forces applied all have the same magnitude.Rank in order from largest to smallest, the torques created (τ1 , τ2 or τ3 ) τ 1 > τ 2 = τ3 An equal force will lead to a greater torque if applied at a right angle. A torque applied at 90 degrees – θ creates the same torque as 90 degrees + θ. Comparing rotational and linear motion Angular Velocity Angular velocity,w, is the rate of change in angular displacement. (radians per second.) w t Angular velocity in rad/s. Angular velocity can also be given as the frequency of revolution, f (rev/s or rpm): w 2f Angular frequency f (rev/s). Angular Acceleration Angular acceleration is the rate of change in angular velocity. (Radians per sec per sec.) w t 2 Angular acceleration (rad/s ) The angular acceleration can also be found from the change in frequency, as follows: 2 (f ) t Since w 2 f Force and Linear Acceleration When an object is subject to a net force, it undergoes an acceleration. (Newton’s 2nd) Torque and Angular Acceleration When a rigid object is subject to a net torque, it undergoes an angular acceleration. Inertia of Rotation Consider Newton’s second law for the inertia of rotation Linear Inertia, m = F/a F = 20 N m= a = 4 m/s2 F = 20 N R = 0.5 m =2 rad/s2 20 N = 5 kg 4 m/s2 Rotational Inertia, I I= (20 N)(0.5 m) = = 2.5 kg m2 2 2 rad/s Force does for translation what torque does for rotation: I F ma, Moment of Inertia This mass analog is called the moment of inertia, I, of the object I mi ri 2 i Is defined relative to rotation axis SI units are kg m2 More About Moment of Inertia • I depends on both the mass and its distribution. • If an object’s mass is distributed further from the axis of rotation, the moment of inertia will be larger. Some dragsters are built so that the front wheels are far ahead of the rear wheels. The main reason for this is a. to streamline the dragster b. to provide better traction. c. to keep the front of the car down. Dragsters baby!! The front wheels are so far forward to help prevent the front from raising off the ground. It can produce a counter torque to the driving force of the wheels. Concept Question: Cylinder Race Two cylinders of the same size and mass roll down an incline, starting from rest. Cylinder A has most of its mass concentrated at the rim, while cylinder B has most of its mass concentrated at the center. Which reaches the bottom first? 1) A 2) B 3) Both at the same time. Concept Q. Ans.: Cylinder Race Answer 2: Because the moment of inertia of cylinder B is smaller, more of the mechanical energy will go into the translational kinetic energy hence B will have a greater center of mass speed and hence reach the bottom first. Common Moments of Inertia Common moments of inertia are on page 251. Example 14 A circular hoop and a disk each have a mass of 3 kg and a radius of 20 cm. Compare their rotational inertias. R I mR (3 kg)(0.2 m) 2 I = 0.120 kg m2 R I = ½mR 2 Disk 2 I = mR 2 Hoop I mR (3 kg)(0.2 m) 1 2 2 1 2 2 I = 0.0600 kg m2 Reminders and info • Should you take the AP test? Important Analogies For many problems involving rotation, there is an analogy to be drawn from linear motion. m x I R f 4 kg A resultant force F produces negative acceleration a for a mass m. F ma w w 50 rad/s o = 40 N m A resultant torque produces angular acceleration of disk with rotational inertia I. I Example 15 Treat the spindle as a solid cylinder. a) What is the moment of Inertia of the spindle? b) If the tension in the rope is 10 N, what is the angular acceleration of the wheel? c) What is the acceleration of the bucket? d) What is the mass of the bucket? M Solution a) What is the moment of Inertia of the spindle? Given: M = 5 kg, R = 0.6 m Moments of Inertia 2 MR , cylindrical shell 1 MR 2 , solid cylinder 2 2 MR 2 , solid sphere 5 2 MR 2 , spherical shell 3 1 ML2 , rod, about end 3 1 ML2 , rod, about middle 12 M 1 I MR 2 = 0.9 kgm2 2 Solution b) If the tension in the rope is 10 N, what is ? Given: I = 0.9 kg m2, T = 10 N, r = 0.6 m Basic formula rF I rT I (0.6m)(10 N)/(0.9 kg∙m2) = 6.67 rad/s2 c) What is the acceleration of the bucket? Given: r=0.6 m, = 6.67 rad/s Basic formula a r a = (6.67 rad/s2)(0.6 m) M a=4 m/s2 Solution d) What is the mass of the bucket? Given: T = 10 N, a = 4 m/s2 Basic formula F ma Ma Mg T T M g a M = 1.72 kg M Concept Question: Cylinder Race Different Masses Two cylinders of the same size but different masses roll down an incline, starting from rest. Cylinder A has a greater mass. Which reaches the bottom first? 1) A 2) B 3) Both at the same time. Concept Q. Ans.: Cylinder Race Different Masses The initial mechanical energy is all potential energy and hence proportional to mass. When the cylinders reach the bottom of the incline, both the mechanical energy consists of translational and rotational kinetic energy and both are proportional to mass. So as long as mechanical energy is constant, the final velocity is independent of mass.So both arrive at the bottom at the same time. Other applications of Torque • https://mail.google.com/mail/u/0/#inbox/14 a0b51b82af3d78?projector=1 Combined Rotation and vcmTranslation vcm vcm First consider a disk sliding without friction. The velocity of any part is equal to velocity vcm of the center of mass. w Now consider a ball rolling without slipping. The angular velocity w about the point P is same as w for disk, so that we write: v w R Or v R v wR P Two Kinds of Kinetic Energy Kinetic Energy of Translation: Kinetic Energy of Rotation: K = ½mv2 w v R K = ½Iw2 P Total Kinetic Energy of a Rolling Object: KT mv I w 1 2 2 KE of center-of-mass motion 1 2 2 KE due to rotation Example 16 What is the kinetic energy of the Earth due to the daily rotation? Given: Mearth=5.98 x1024 kg, Rearth = 6.63 x106 m. Basic formula 2 w T Solid sphere 2 I MR 2 5 Basic formula 1 2 KE Iw 2 First, find w 2 w 24 3600 1 2 2 KE MR w 5 = 7.27 x10-5 rad/s = 2.78 x1029 J Summary – Rotational Analogies Quantity Linear Displacement Displacement x Inertia Mass (kg) Force Newtons N Rotational Radians I (kgm2) Torque N·m Velocity v “ m/s ” w Rad/s Acceleration a “ m/s2 ” Rad/s2 Momentum mv (kg m/s) Iw (kgm2rad/s) Analogous Formulas Linear Motion Rotational Motion F = ma K = ½mv2 Work = Fx = I K = ½Iw2 Work = Power = Fv Power = Iw Fx = ½mvf2 - ½mvo2 = ½Iwf2 - ½Iwo2 Example 17 A solid sphere rolls down a hill of height 40 m. What is the velocity of the ball when it reaches the bottom? (Note: We don’t know r or m!) Basic formula 1 2 1 2 mgh mv Iw 2 2 For solid sphere 2 2 I mr 5 Basic formula v wr 1 2 2 2 2 gh v r w 2 5 1 2 2 2 2 2 gh gh v v , v 2 5 7/5 v = 23.7 m/s Angular Momentum L Iw Rigid body L mvr Point particle Analogy between L and p Angular Momentum Linear momentum L = Iw p = mv = L/t F = p/t Conserved if no net Conserved if no net outside torques outside forces Example 18 A 65-kg student sprints at 8.0 m/s and leaps onto a 110-kg merry-go-round of radius 1.6 m. Treating the merry-go-round as a uniform cylinder, find the resulting angular velocity. Assume the student lands on the merry-go-round while moving tangentially. Solution Known: M, R, m, v0 Find: wF First, find L0 Basic formula L mvr L0 mvR Next, find Itot Solid cylinder I Tot 1 2 mR MR 2 2 1 I MR 2 Now, given I and L , find w tot 0 2 Particle Basic formula I MR 2 L Iw L0 = 2.71 rad/s w I Tot An ice skater spins with her arms folded. When she extends her arms outward her angular velocity a. increases b. decreases a. remains the same If the skater extends her arms her radius becomes greater and she has a greater momentum of inertia. A greater momentum of inertia causes her to have less ω due to conservation of momentum. If her new I is greater, her new ω must be smaller. Summary of Formulas: K Iw 1 2 I = mR2 Work 2 ½ Iw ½ Iw 2 f 2 0 I ow o I f w f Power t w Conservation: Height? mgho Rotation? ½Iwo2 velocity? ½mvo2 = mghf Height? ½Iwf2 Rotation? ½mvf2 velocity?