Project 2 Final Writeup Compiled

ME 370: Project Part II
Serpentine Belt Drive Analysis and Design
Dan Scott
Glen Burkhardt
Kyle Mordan
1
Design Modification
Wn1 v Belt Modulus
460
455
450
445
440
435
430
425
420
415
410
5.8
6 6.2
6.4
6.6
Belt Modulus
6.8
7 7.2
x 10
4
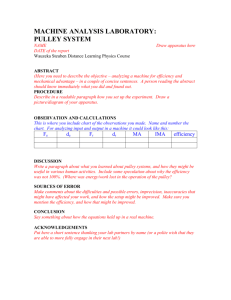
Increasing belt modulus causes the first harmonic to increase linearly. Increasing the belt modulus causes the spring constant to increase proportionally, thus the stiffness matrix becomes larger. We know the relationship between natural frequency and stiffness is 𝜔 𝑛
= √ 𝑘 𝑒𝑞 𝑚 𝑒𝑞
. Because all of the stiffness variables are increasing linearly at the same time and mass remains the same, the natural frequencies found in Matlab using the ‘polyeig’ function plotted against belt modulus produces a linear plot.
As in the previous case, the second harmonic increases linearly with belt modulus and for the same reason explained earlier. Since the second harmonic obviously occurs at a higher natural frequency than the first, the y scale is much larger than before. This is the only real difference.
2
434.9
Wn1 v Tensioner Spring Constant
434.8
434.7
434.6
434.5
434.4
434.3
434.2
8400 8600 8800 9000 9200 9400 9600 9800 10000 10200 10400
Tensioner Spring Constant
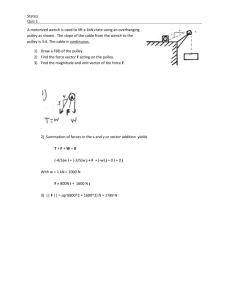
Increasing tensioner spring constant causes the first harmonic to increase linearly, however, only to a very small degree. The reason the tensioner has such a small effect on the first harmonic is that it only influences one component of the stiffness matrix - the x component of the tensioner. Since the tensioner has the smallest mode shape ( 0.0123 for the first harmonic, after being linearized), the effect of the tensioner spring constant on the first harmonic is minimal.
Wn2 v Tensioner Spring Constant
2025.525
2025.52
2025.515
2025.51
2025.505
2025.5
2025.495
2025.49
2025.485
8400 8600 8800 9000 9200 9400 9600 9800 10000 10200 10400
Tensioner Spring Constant
The relationship between tensioner spring constant and the second harmonic is the same as with the first harmonic. Like before the mode shape for the tensioner pulley in the second harmonic is smaller than any equation of motion (0.0062 for the second harmonic after being linearized), so the effect of the tensioner spring constant on the second harmonic is minimal.
3
Pulley 0
434.68
434.66
434.64
434.62
434.6
434.58
434.56
434.54
434.52
434.5
434.48
70 75 80 85
Radius 0 (mm)
90 95
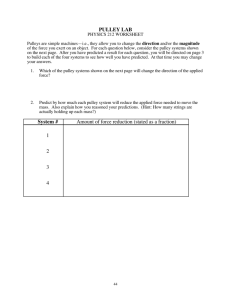
Because of our relationship for belt span length from part 1 of this project, we know that an increase in pulley radius results in a decrease of belt length. Decreasing belt length causes greater stiffness, and thus higher natural frequencies. The first harmonic changes very little with change in radius for pulley 0.
The reason for this small change is that this pulley is associated with the forcing equation, and not with the equations of motion. Although changing this radius has a small effect on stiffness, k
A
, its overall effect on the whole system is very small.
2027.5
2027
2026.5
2026
Pulley 0
2025.5
2025
2024.5
70 75 80 85
Radius 0 (mm)
90 95
The second harmonic also changes minimally with changes to radius in Pulley 0, although, the change is slightly more so than with the first harmonic. This is because there is more energy associated with belt length A in the second harmonic.
4
Pulley 1
436.5
436
435.5
435
434.5
434
433.5
433
432.5
432
431.5
50 55 60 65
Radius 1 (mm)
70 75
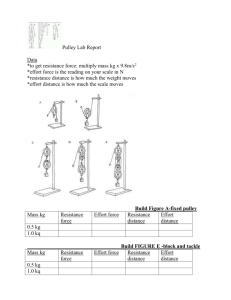
Changing radius 1 has minimal effect on the first harmonic because the mode shape in the first harmonic is the second smallest of all of the equations of motion (0.208 after being linearized). This means that it has the smallest effect on the overall natural frequency.
Pulley 1
2300
2200
2100
2000
1900
1800
1700
50 55 60 65
Radius 1 (mm)
70 75
Changing radius 1 has a very large effect on the second harmonic because the mode shape in the second harmonic is the largest of all of the equations of motion (-1 after being linearized). This means that it has the largest effect on the overall natural frequency.
5
Pulley 2
435
434
433
432
431
430
60
440
439
438
437
436
65 70 75
Radius 2 (mm)
80 85
The mode shape of Pulley 2 in the first harmonic is the third lowest of all of the mode shapes (0.304 after being linearized), so the effect of changing radius 2 is intermediate relative to changing the other pulley radii.
2060
2050
2040
2030
2020
2010
2000
1990
1980
60
Pulley 2
65 70 75
Radius 2 (mm)
80 85
The mode shape of Pulley 2 in the second harmonic is the second highest of all the mode shapes (-0.52 after being linearized), to the effect of changing radius 2 is high relative to changing other pulley radii.
6
445
Pulley 3
440
435
430
425
420
415
410
-55 -50 -45 -40
Radius 3 (mm)
-35 -30
Note that the plot is inversed because Pulley 3 is back-wrapped. The mode shape for Pulley 3 in the first harmonic is the second highest (0.650 after being linearized), so the effect of changing radius 3 on the first harmonic is relatively large.
Pulley 3
2070
2060
2050
2040
2030
2020
2010
2000
1990
1980
1970
-55 -50 -45 -40
Radius 3 (mm)
-35 -30
Again, the plot is inversed because Pulley 3 is back-wrapped. The mode shape for Pulley 3 in the second harmonic is the third highest (-0.26 after being linearized), so the effect of changing radius 3 on the second harmonic is relatively large.
7
550
Pulley 4
500
450
400
350
300
15 20 25 30
Radius 4 (mm)
35 40 45
Changing radius 4 has the largest effect on the first harmonic because Pulley 4 has the highest mode shape (1 after being linearized).
Pulley 4
2080
2070
2060
2050
2040
2030
2020
2010
2000
1990
1980
15 20 25 30
Radius 4 (mm)
35 40 45
Changing radius 4 has a moderate effect on the second harmonic because Pulley 4 has the fourth highest mode shape (0.22 after being linearized).
8
440
Pulley 5
438
436
434
432
430
428
55 60 65 70
Radius 5 (mm)
75 80
Pulley 5 has the third highest mode shape in the first harmonic (0.454 after being linearized), so the effect of changing radius 5 on the first harmonic is moderate.
Pulley 5
2030
2028
2026
2024
2022
2020
2018
2016
2014
55 60 65 70
Radius 5 (mm)
75 80
Pulley 5 has the second lowest mode shape in the second harmonic (0.22 after being linearized), so the effect of changing radius 5 on the second harmonic is relatively low.
9
435
Pulley 6
434
433
432
431
430
429
-50 -45 -40 -35
Radius 6 (mm)
-30 -25
Note that Pulley 6 is back-wrapped, so the plot is inversed. Pulley 6 has the lowest mode shape in the first harmonic (0.310 after being linearized), so the effect of changing radius 6 on the first harmonic is very low.
Pulley 6
2018
2016
2014
2012
2010
-50
2028
2026
2024
2022
2020
-45 -40 -35
Radius 6 (mm)
-30 -25
Again, Pulley 6 is back-wrapped, which is why the plot is inversed. Pulley 6 also has the lowest mode shape in the second harmonic (0.15 after being linearized), so changing radius 6 has minimal effect on the second harmonic.
10
Increasing the x position causes the first harmonic to decrease, while increasing the y position causes the first harmonic to increase. Changes that increase the length of the belt will decrease the stiffness of the belt, ultimately decreasing the natural frequency of the system. As discussed previously, pulley 1 has minimal effect on the system because its mode shape in the first harmonic is the second smallest of all of the mode shapes. Therefore, changing either the x position or y position of the center of the pulley has only a small effect on the natural frequency of the system.
Increasing the x position causes the second harmonic to decrease drastically, while increasing the y position causes the second harmonic to increase slightly. As mentioned before, the mode shape of pulley 1 in the second harmonic is the second largest of all the mode shapes in the second harmonic.
Therefore, changes in the position of pulley 1 have a relatively large effect on the second harmonic.
11
Increasing the x position causes the first harmonic to decrease, while increasing the y position causes the first harmonic to increase. Because the mode position of pulley 2 in the second harmonic is the third lowest mode, the position of pulley 2 has a very small impact on the natural frequency of the system.
Again, increasing x position causes a decrease in the second harmonic, while increasing y position causes an increase in the second harmonic. The mode shape of pulley 2 is the largest in the second harmonic, so the position of pulley 2 has a large effect on the natural frequency.
12
Because this pulley is back-wrapped, increasing the x position actually increases the natural frequency.
Again, increasing the y position also increases natural frequency. As can be clearly seen in the plot, the largest first harmonic is achieved by increasing both x and y positions. Pulley 3 has a relatively large mode shape, so the position of pulley 3 has a large effect on the natural frequency.
As in the first harmonic, the second harmonic increases with an increase in x position and/or y position.
Pulley 3 has a large mode shape in the second harmonic, so the effect of position on natural frequency is relatively large.
13
Changing the x position appears to have little effect on the first harmonic, while increasing the y position causes a small decrease in the first harmonic. Pulley 4 has only a moderate effect on the first harmonic because the mode shape is the fourth highest.
Again, x position appears to have negligible effect on the second harmonic, and increasing the y position causes the second harmonic to decrease. Because this pulley has the fourth highest mode shape, the effect of its position has only moderate effect on the second harmonic.
14
As the x position of pulley 5 is increased the first harmonic decreases, and as the y position is increased the first harmonic increases as well. The mode shape of pulley 5 in the first harmonic is the third highest, so the effect of pulley 5 position on natural frequency is only moderate.
Increasing the x position of pulley 5 causes a slight increase in the second harmonic, and increasing the y position causes a slight increase in the second harmonic as well. The mode shape for pulley 5 in the second harmonic is the second lowest, which explains the minute effect of position on natural frequency.
15
Increasing the x position and increasing in the y position of pulley 6 both cause the first harmonic to increase. Because pulley 6 has the lowest mode shape in the second harmonic, the effect of position on the second harmonic is very low.
Increasing x position causes a decrease in the second harmonic, while increasing the y position causes an increase in the second harmonic for pulley 6. Pulley 6 has the lowest mode shape in the second harmonic, so the effect of position on natural frequency is very low.
16
Final Design Drawn Using Matlab:
17
Steady State Analysis
Pulley 1
10
8
6
4
2
0
0
20
18
16
14
12
200 400 600 800 1000 1200 1400 1600 1800 2000 2200
Engine Speed (rad/s)
Pulley 2
20
18
16
14
12
10
4
2
8
6
0
0 200 400 600 800 1000 1200 1400 1600 1800 2000 2200
Engine Speed (rad/s)
Pulley 3
10
8
6
4
2
0
0
20
18
16
14
12
200 400 600 800 1000 1200 1400 1600 1800 2000 2200
Engine Speed (rad/s)
18
Pulley 1 Undamped
8
6
4
12
10
2
0
0
20
18
16
14
200 400 600 800 1000 1200 1400 1600 1800 2000 2200
Engine Speed (rad/s)
Pulley 2 Undamped
20
18
16
14
12
10
8
6
4
2
0
0 200 400 600 800 1000 1200 1400 1600 1800 2000 2200
Engine Speed (rad/s)
Pulley 3 Undamped
10
8
6
4
2
0
0
20
18
16
14
12
200 400 600 800 1000 1200 1400 1600 1800 2000 2200
Engine Speed (rad/s)
Pulley 4
10
9
8
7
6
5
4
3
2
1
0
0 200 400 600 800 1000 1200 1400 1600 1800 2000 2200
Engine Speed (rad/s)
15
10
5
Pulley 5
0
0 200 400 600 800 1000 1200 1400 1600 1800 2000 2200
Engine Speed (rad/s)
15
10
5
Pulley 6
0
0 200 400 600 800 1000 1200 1400 1600 1800 2000 2200
Engine Speed (rad/s)
19
Pulley 4 Undamped
5
4
3
2
1
0
0
10
9
8
7
6
200 400 600 800 1000 1200 1400 1600 1800 2000 2200
Engine Speed (rad/s)
Pulley 5 Undamped
15
10
5
0
0 200 400 600 800 1000 1200 1400 1600 1800 2000 2200
Engine Speed (rad/s)
Pulley 6 Undamped
15
10
5
0
0 200 400 600 800 1000 1200 1400 1600 1800 2000 2200
Engine Speed (rad/s)
The frequency response of each pulley decreases in amplitude due to the damper. In several of our plots it appears that the damper eliminates some secondary vibrations. The underdamped and damped plots follow similar paths. They all peak at the same frequencies however the damped situation having noticeably lower peaks. In the underdamped plots there were some spikes that occurred in-between the natural frequencies observed in earlier parts of this project. The damped situation appeared to diminish these odd results. The damped plots overall were more smooth in the transitions between natural frequencies. This would favor a safer more reliable operating scenario in the real world.
Discussion
For our final design, that changed the first two natural frequencies more than any other slight modification, we decided to try to lower the second lowest natural frequency (2023.5 RPM) as much as possible. We decided to change this harmonic more than the first one because we felt that, for a car design, it is best for natural frequencies to exist lower or higher than the normal operating speed of the car. The first harmonic frequency is 435 RPM, which is already below the average operating speed of car engines, so we did not concern ourselves as much with this one. The second harmonic, however, is well inside the standard operating speed of a car engine, so we thought it would be beneficial to lower this one the most. To find the ideal situation that lowers the second harmonic the most, we built an optimizing function like this:
(.2*(baselinewn1 – newwn1) + .8*(baselinewn2-newwn2))
This function means that changes in the second harmonic are weighted more than the first. From here we looked at the previous slight modifications and the mode shapes to get the changes that have the most effect on the second harmonic. From the mode shapes {-1; -.52; -.26; .22; .22; .15; .0062} it can be seen that the first few pulleys have more effect on this harmonic than any others. This idea is also backed up with the data from the slight modifications done earlier in the project. The first modification we did was change the size of pulley 1 to the lowest it can be (54.5 mm) and move it to the extremes of its x and y location that made it even lower (281.2 mm, 40 mm). We continued through this process of changing parameters based on the mode shape describing wn2 and the graphs showing the changes from the other slight modifications. This process lead to a total optimization number of 3.0404e5, and a final first harmonic of 246.98 RPM and second harmonic of 1416.2 RPM. This second harmonic may still be in the normal operating speed of an engine but it is significantly lower and would cause fewer problems.
Some issues that may occur from this design are that other harmonics, which were not intended to be lowered, are now lower. This is a problem because some have now dropped into the operating speed which we were trying to eliminate harmonics from. This means that more harmonics will occur while the car is running and can cause unforeseen vibrating, which may cause components to break or fail. One problem that did have to be addressed was the fact that the design of pulleys 0 and 5 could overlap if you changed the radius of pulley 5 and moved it to the right spot; luckily, changing the radius of pulley 0 is allowed in this optimization, which not only solved the problem, but slightly improved the
20
overall optimization. Since our only goal was to lower the first two natural frequencies (specifically the second one) we did not account for this shift in our design. If the goal of this optimization was to include the other harmonics, different measures would have had to be taken, like perhaps raising all of the frequencies instead.
The results of our optimization demonstrated that there is no perfect solution to eliminate the issue of harmonics in this belt drive. The goal of the optimization really depends on which natural frequencies have the greatest potential to cause problems in the system. In our case, we hoped to lower the first two natural frequencies to outside of the engine speed, but this lead to even more natural frequencies being dropped into that zone. It is important to have a specific goal for your optimization because this makes the process easier. However, neglecting variables can lead to other problems.
Overall, our design did optimize the belt drive based on our specific goal, but it also had unforeseen issues.
21
Appendices:
Baseline Code:
% Base Values
%pulley 0 x0 =0/1000; y0 = 0/1000; r0 = 81.25/1000;
%pulley 1 x1 = 261.5/1000; y1 = 60/1000; r1 = 64.50/1000; j1 = (41.5/100/100);
%pulley 2 x2 = 252/1000; y2 = 234/1000; r2 = 70.6/1000; j2 = (13.1/100/100);
%pulley 3 x3 = 90.3/1000; y3 = 251.1/1000; r3 = -41.15/1000; j3 = (2.63/100/100);
%pulley 4 x4 = 86/1000; y4 = 354/1000; r4 = 30/1000; j4 = (42.1 /100/100);
%pulley 5 x5=0; y5=167.5/1000; r5 = 67.5/1000; j5 = (17.6 /100/100);
%pulley 6 x6 = 128/1000; y6 = 126/1000; r6 = -38.1/1000; j6 = (2.08 /100/100); m6 = .2663; x6nom = 128/1000;
22
EA = 65*1000;
%lengths (meters) la=((x1-x0)^2+(y1-y0)^2-(r1-r0)^2)^.5; lb=((x2-x1)^2+(y2-y1)^2-(r2-r1)^2)^.5; lc =((x3-x2)^2+(y3-y2)^2-(r3-r2)^2)^.5; ld=((x4-x3)^2+(y4-y3)^2-(r4-r3)^2)^.5; le=((x5-x4)^2+(y5-y4)^2-(r5-r4)^2)^.5; lf=((x6-x5)^2+(y6-y5)^2-(r6-r5)^2)^.5; lg=((x0-x6)^2+(y0-y6)^2-(r0-r6)^2)^.5;
%K's ka = EA/la; kb = EA/lb; kc = EA/lc; kd = EA/ld; ke = EA/le; kf = EA/lf; kg = EA/lg;
%Stiffness o(eq number)(pulley number) o21 = (ka+kb)*r1^2; o22 = -kb*r1*r2; o32 = (kb+kc)*r2^2; o33 = -kc*r2*abs(r3); o31 = -kb*r1*r2; o43 = (kc+kd)*r3^2; o44 = -kd*abs(r3)*r4; o42 = -kc*r2*abs(r3); o54 = (kd+ke)*r4^2; o55 = -ke*r4*r5; o53 = -kd*abs(r3)*r4; o65 = (ke+kf)*r5^2; o66 = -kf*r5*abs(r6); o64 = -ke*r4*r5; o6X = kf*r5/lf*(x5-x6nom); o76 = (kf+kg)*r6^2; o75 = -kf*r5*abs(r6); o7X = -kf*abs(r6)/lf*(x5-x6nom)-kg*abs(r6)/lg*(x6nom-x0); o86 = -kg*(x6nom-x0)/lg*abs(r6)-kf*(x5-x6nom)/lf*abs(r6); o85 = kf*(x5-x6nom)/lf*r5; o8X = kg*(x6nom-x0)/lg*(x6nom-x0)/lg+kf*(x5-x6nom)/lf*(x5-x6nom)/lf+9.34*1000;
%nautral frequnecies keq =[o21,o22,0,0,0,0,0; o31,o32,o33,0,0,0,0;0,o42,o43,o44,0,0,0;0,0,o53,o54,o55,0,0
0,0,0,o64,o65,o66,o6X;0,0,0,0,o75,o76,o7X; 0,0,0,0,o85,o86,o8X]; ceq = [0,0,0,0,0,0,0;0,0,0,0,0,0,0;0,0,0,0,0,0,0;0,0,0,0,0,0,0;0,0,0,0,0,0,0;0,0,0,0,0,0,0;0,0,0,0,0,0,0];
23
meq = [j1,0,0,0,0,0,0;0,j2,0,0,0,0,0;0,0,j3,0,0,0,0;0,0,0,j4,0,0,0;0,0,0,0,j5,0,0;0,0,0,0,0,j6,00,0,0,0,0,0,m6];
[Qn,lam] = polyeig(keq,ceq,meq);
%Llam/3 becasue third harmonic times by 60/2pi to get RPM lamimag = imag(lam);
Qimag = imag(Qn); wn1 = lamimag/3*60/(2*pi);
%Taking out the negative wn and leaves only positive ones n=1; v=1; while n<15
if wn1(n)>0 wn(v,1) = wn1(n); v = v+1;
else
end
n=n+1; end format short g
BWN = sort(wn);
Modeshapes = [Qimag(:,12)/Qimag(4,12), (Qimag(:,9)/Qimag(1,10)) ]
Belt Modulus:
Runs loop until gets to 1% bigger than original
EA = 65*1000-65*1000*.1; while EA <= 65*1000+65*1000*.1
***REST OF CODE SAME AS BASELINE*** sortwn = sort(wn); wn1(c) = sortwn(1); wn2(c) = sortwn(2);
BeltMod(c) = EA; c = c+1;
EA = EA + 1; end figure
24
plot(BeltMod,wn1) xlabel('Belt Modulus') ylabel('First Harmonic') title('Wn1 v Belt Modulus') figure plot(BeltMod,wn2) xlabel('Belt Modulus') ylabel('First Harmonic') title('Wn2 v Belt Modulus')
Tensioner Spring Constant (Kt):
kt = 9.34*1000-9.34*1000*.1; while kt <= 9.34*1000+9.34*1000*.1
***REST OF CODE SAME AS BASELINE*** sortwn = sort(wn); wn1(c) = sortwn(1); wn2(c) = sortwn(2);
TensCon(c) = kt; c = c+1; kt = kt + 1; end sortwn figure plot(TensCon,wn1) xlabel('Tensioner Spring Constant') ylabel('First Harmonic') title('Wn1 v Tensioner Spring Constant') figure plot(TensCon,wn2) xlabel('Tensioner Spring Constant') ylabel('First Harmonic') title('Wn2 v Tensioner Spring Constant')
25
Benchmarking and Drawing Optimized Pulley System:
%pulley 0 x0 =0/1000; y0 = 0/1000; r0 = 81.25/1000-1/100;
%pulley 1 x1 = 261.5/1000+2/100; y1 = 60/1000-2/100; r1 = 64.50/1000-1/100; j1 = (41.5/100/100);
%pulley 2 x2 = 252/1000 +2/100; y2 = 234/1000 +2/100; r2 = 70.6/1000-1/100; j2 = (13.1/100/100);
%pulley 3 x3 = 90.3/1000 -2/100; y3 = 251.1/1000 -2/100; r3 = -41.15/1000 +1/100; j3 =(2.63/100/100)*(-41.15/1000)^4/(r3)^4;
%pulley 4 x4 = 86/1000+2/100; y4 = 354/1000+2/100; r4 = 30/1000-1/100; j4 = (42.1 /100/100);
%pulley 5 x5=0-2/100; y5=167.5/1000-2/100; r5 = 67.5/1000-1/100; j5 = (17.6 /100/100);
%pulley 6 x6 = 128/1000+2/100; y6 = 126/1000-2/100; r6 = -38.1/1000+1/100; j6 = (2.08 /100/100)*(-38.1/1000)^4/(r6)^4; m6 = .2663;
***CODE FOR FINDING WN IS SAME AS BASELINE***
Opt = .2*((BWN(1)-sortwn(1)))^2 + .8*((BWN(2)-sortwn(2)))^2
26
%drawing
Figure box0 = rectangle('position',[(-81.25/1000-1/100),(-81.25/1000-
1/100),(81.25/1000*2+2/100),(81.25/1000*2+2/100)]); hold on circ0 = rectangle('position',[x0-r0,y0-r0,r0*2,r0*2],'curvature',[1,1]); hold on box1 = rectangle('position',[(261.5/1000-64.5/1000-1/100),(60/1000-64.5/1000-
1/100),(64.5/1000*2+2/100),(64.5/1000*2+2/100)]); hold on circ1 = rectangle('position',[x1-r1,y1-r1,r1*2,r1*2],'curvature',[1,1]); hold on box2 = rectangle('position',[(252/1000-70.6/1000-1/100),(234/1000-70.6/1000-
1/100),(70.6/1000*2+2/100),(70.6/1000*2+2/100)]); hold on circ2 = rectangle('position',[x2-r2,y2-r2,r2*2,r2*2],'curvature',[1,1]); hold on box3 = rectangle('position',[(90.3/1000-41.15/1000-1/100),(251.1/1000-41.15/1000-
1/100),(41.15/1000*2+2/100),(41.15/1000*2+2/100)]); hold on ; circ3 = rectangle('position',[x3-abs(r3),y3-abs(r3),abs(r3*2),abs(r3*2)],'curvature',[1,1]); hold on box5 = rectangle('position',[(0/1000-67.5/1000-1/100),(167.5/1000-67.5/1000-
1/100),(67.5/1000*2+2/100),(67.5/1000*2+2/100)]); hold on box4 = rectangle('position',[(86/1000-30/1000-1/100),(354/1000-30/1000-
1/100),(30/1000*2+2/100),(30/1000*2+2/100)]); hold on ; circ4 = rectangle('position',[x4-abs(r4),y4-abs(r4),abs(r4*2),abs(r4*2)],'curvature',[1,1]); hold on box5 = rectangle('position',[(0/1000-67.5/1000-1/100),(167.5/1000-67.5/1000-
1/100),(67.5/1000*2+2/100),(67.5/1000*2+2/100)]); hold on ;
27
circ5 = rectangle('position',[x5-abs(r5),y5-abs(r5),abs(r5*2),abs(r5*2)],'curvature',[1,1]); hold on box6 = rectangle('position',[(128/1000-38.1/1000-1/100),(126/1000-38.1/1000-
1/100),(38.1/1000*2+2/100),(38.1/1000*2+2/100)]); hold on ; circ6 = rectangle('position',[x6-abs(r6),y6-abs(r6),abs(r6*2),abs(r6*2)],'curvature',[1,1]); set([box0,box1,box2,box3,box4,box5,box6],'LineStyle','--') set([box0,box1,box2,box3,box4,box5,box6],'EdgeColor',[1,0,0]) set([circ0,circ1,circ2,circ3,circ4,circ5,circ6],'Facecolor',[0,0,1]) axis equal set(gca,'Color',[1, 1,1]);
LOCATION:
r= [81.25/1000,64.50/1000,70.6/1000,-41.15/1000,30/1000,67.5/1000,-38.1/1000]; j = [0,(41.5/100/100),(13.1/100/100),(2.63/100/100),(42.1 /100/100),(17.6 /100/100),(2.08
/100/100),.2663]; x=[0/1000,261.5/1000,252/1000,90.3/1000,86/1000,0,128/1000]; y=[0/1000,60/1000, 234/1000,251.1/1000,354/1000,167.5/1000,126/1000]; c1 = 1; c2 = 1; c=2; c3 = 1; while c<8
x=[0/1000,261.5/1000,252/1000,90.3/1000,86/1000,0,128/1000];
y=[0/1000,60/1000, 234/1000,251.1/1000,354/1000,167.5/1000,126/1000];
x(c) = x(c) - .01;
y(c) = y(c) - .01;
c1 = 1;
c3 = 1;
while c1<=21
y=[0/1000,60/1000, 234/1000,251.1/1000,354/1000,167.5/1000,126/1000];
y(c) = y(c) - .01;
c3 = 1;
while c3<=21
28
***CODE FOR FINDING WN IS THE SAME BESIDES CALLING FROM ROW VECTOR INSTEAD OF JUST A
VARIABLE SO x0 is now actually x(1)***
END OF LOOP BELOW, MAKES A X, Y, wn1 and wn2 ARRAYS THAT ARE ALL 126 ROW AND 21
COLUMNS, THIS ALLOWS MESH TO WORK PROPERLY. sortwn = sort(wn); wn1(c2,c3) = sortwn(1); wn2(c2,c3) = sortwn(2); xplot(c2,c3) = x(c)*1000; yplot(c2,c3) = y(c)*1000;
y(c) = y(c) + .001;
c3= c3+1;
end
c2 = c2+1;
x(c) = x(c) +.001;
c1=c1+1;
end
c=c+1; end
%Figures figure mesh(yplot(1:21,:),xplot(1:21,:),wn1(1:21,:)) xlabel('Y1 Location (mm)') ylabel('X1 Location (mm)') zlabel('First Harmonic') title('Pulley 1') figure mesh(yplot(1:21,:),xplot(1:21,:),wn2(1:21,:)) xlabel('Y1 Location (mm)') ylabel('X1 Location (mm)') zlabel('Second Harmonic') title('Pulley 1')
REST OF FIGURES WORK THE SAME WAY JUST WITH DIFFERENT ROWS BASED ON EACH PULLEY
Pulley Radius:
x=[0/1000,261.5/1000,252/1000,90.3/1000,86/1000,0,128/1000]; y=[0/1000,60/1000, 234/1000,251.1/1000,354/1000,167.5/1000,126/1000]; counter = 1; while counter<8
29
r= [81.25/1000,64.50/1000,70.6/1000,-41.15/1000,30/1000,67.5/1000,-38.1/1000];
j = [0,(41.5/100/100),(13.1/100/100),(2.63/100/100),(42.1 /100/100),(17.6 /100/100),(2.08
/100/100),.2663];
counter1 = 0;
c=1;
if counter==4
r(counter) = r(counter)+1/100;
elseif counter == 7
r(counter)= r(counter)+1/100;
else
r(counter) = r(counter)-1/100;
end
while counter1 < 201
j(4) = (2.63/100/100)*abs((-41.15/1000))^4/(r(4))^4;
j(7) = (2.08 /100/100)*abs((-38.1/1000))^4/(r(7))^4;
***CODE FOR FINDING WN IS THE SAME BESIDES CALLING FROM ROW VECTOR INSTEAD OF JUST A
VARIABLE SO r0 is now actually r(1)*** wn1(counter,c) = sortwn(1); wn2(counter,c) = sortwn(2);
R(counter,c) = r(counter)*1000;
if counter==4
r(counter) = r(counter)-1/10000;
elseif counter == 7
r(counter)= r(counter)-1/10000;
else
r(counter) = r(counter)+1/10000;
end counter1= counter1+1; c=c+1;
end counter = counter +1; end
%Figures plot(R(1,:),wn1(1,:)) xlabel('Radius 0 (mm)') ylabel('First Harmonic (RPM)') figure plot(R(1,:),wn2(1,:)) xlabel('Radius 0 (mm)')
ylabel('Second Harmonic (RPM)')
REST OF FIGURES WORK THE SAME WAY JUST WITH DIFFERENT ROW BASED ON EACH PULLEY
30
Steady State:
keq =[o21,o22,0,0,0,0,0;
o31,o32,o33,0,0,0,0;
0,o42,o43,o44,0,0,0;
0,0,o53,o54,o55,0,0;
0,0,0,o64,o65,o66,o6X;
0,0,0,0,o75,o76,o7X;
0,0,0,0,o85,o86,o8X]; ceq = [0,0,0,0,0,0,0;
0,0,0,0,0,0,0;
0,0,0,0,0,0,0;
0,0,0,0,0,0,0;
0,0,0,0,0,0,0;
0,0,0,0,0,0,0;
0,0,0,0,0,0,750]; meq = [j1,0,0,0,0,0,0;
0,j2,0,0,0,0,0;
0,0,j3,0,0,0,0;
0,0,0,j4,0,0,0;
0,0,0,0,j5,0,0;
0,0,0,0,0,j6,0
0,0,0,0,0,0,m6]; f = [(ka*r0*r1);0;0;0;0;(kg*r6*r0);(-kg*r0*(x6-x0)/lg)];
%Amp
A(1:7,c) = abs((-(ro*3)^2*[meq]+1i*ro*3*[ceq]+[keq])^-1*[f]); rplot(c) = ro; figure plot(rplot(1,:),A(1,:)) axis([0,2200,0,20]) xlabel('Engine Speed (rad/s)') ylabel('Amplitude') title('Pulley 1') figure plot(rplot(1,:),A(2,:)) axis([0,2200,0,20]) xlabel('Engine Speed (rad/s)') ylabel('Amplitude') title('Pulley 2')
31
EVERYTHING ELSE WORKS THE SAME AS THE OTHER SCRIPTS FOR THE INPUTS FOR THE STIFFNESS
MATRIX. ALL THE REST OF THE PULLEYS ARE THE SAME THING WITH DIFFERENT ROW BEING CALLED
WHEN PLOTTING
32