Lecture 5 - Inside Mines
advertisement

MEGN 424:
Computer Aided Engineering
Truss Structural Stability
& Rigid Body Motion
1
Truss Structures
•
•
•
•
•
•
Two-force members connected by a ball and socket joint (i.e.,
elements do not transmit bending moments)
Each member of a truss structure is only subject to axial tensile
or compressive forces (i.e., a two-force member).
Each truss member has a specific cross sectional area and
material properties.
Each truss member can only stretch/contract along the axis of
the truss.
When viewing the mesh and results in SWS, the elements are
represented by cylinders regardless of the actual cross
section.
A curved structural member is modeled with a number of
straight elements.
2
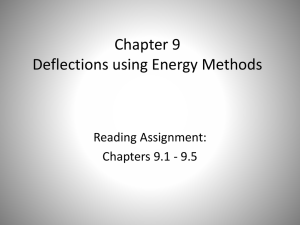
Stability of Truss Structures
F
F
Unstable
– rotates freely without
resistance (and collapses)
Stable
– deforms with resistance
3
Stability Equations
Stability equation for a 2D Truss Structure :
e 2n 3
Stability equation for a 3D Truss Structure :
e 3n 6
where
e – number of elements
n – number of joints (nodes)
4
1D Truss Element
For a 1D truss element, the element stiffness matrix is:
u1
F1
u2
ke
1
2
Element e
F2
ke
e
k
k e u1e
e
e
k u 2
[ Ke ]
F1e
e
F2
{ue} {Fe}
A node only has 1 degree of freedom (1 DOF).
In a 1D truss analysis two conditions may be applied to
a node:
1) The axial translation may be fixed (specified
displacement – may be zero or non-zero)
2) Apply a load in the axial direction (+ or -)
5
2D Truss Element
1
Nodes
2
u2y
F2x
ke
node 1
u1y
q
F1x
u1x
node 2
x
u2x
F2y
Node 1
Node 2
y
x
k11 k12
k
k 22
21
k 31 k 32
k 41 k 42
k13
k 23
k 33
k 43
y
k14 u1x F1x
k 24 u1y F1y
u
F2 x
k 34 2 x
k 44 u 2 y F2 y
F1y
4x4
4x1
4x1
The element stiffness matrix is now a 4x4 instead of a 2x2,
because each node can now move in the x- or y- direction.
In this case each node has 2 DOFs.
In a 2D truss analysis, two conditions may be applied to a
node:
1) The x-translation or y-translation may be fixed
(specified displacement – may be zero or non-zero)
2) Apply a load in the x-direction or y-direction (+ or -)
6
Standard Boundary Condition Symbols
Fixed pin/node constraints:
1) Pin: All Translations fixed
2) Roller: one Translation fixed
y
z
x
Tx,Ty
Translation
fixed in x & y
Examples
Ty
Translation
fixed in y,
7
Standard Boundary Condition Symbols
Fixed boundary constraints:
1)Fully fixed: all boundary
translations
2)Roller: boundary rolls
without friction
2) Right side of
sheet on rollers
y
1) Plate bottom
edge fixed
z
x
Tx,Ty
Tx
Tx,Ty,Rz
Note, a fully fixed condition (including
Rotation about z-axis) can be applied to
a pin/node on a Beam not a Truss
8
The Golden Rules of Finite Elements
1.
Elements must be connected at nodes.
2.
Forces and boundary conditions (fixed translations) can only
be applied at nodes.
3.
The application of a nodal force in a DOF that is fixed at the
same node has no effect on the displacements and stresses in
the system.
EXAMPLE: If the x-translation DOF is fixed and a force
is applied in the x-direction at a node, the overriding
nodal constraint is the fixed translation, and the
applied force will have no effect on displacements or
stresses anywhere in the system. However the
reaction force at the fixed node will be changed.
9
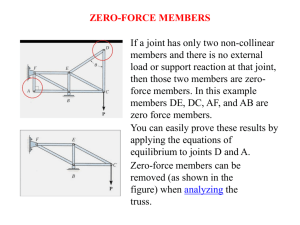
FE Truss Model – Modeling Errors
F
4
a)
5
2
1
3
1
2
F/2
2
4
1
1
3
6
F/2
b)
5
4
3
6
Model a) – ERRORS
1. Force F, cannot be applied
at the mid-side of element 2
2. Element 6 is only connected
to elements 1 and 5.
5
5
4
2
7
3
Notation
1. Black dots indicate nodes
2. Small numbers are node IDs
3. Larger numbers are elements IDs
Model b) - CORRECTED
1. Force F/2 applied at
nodes 4 and 5.
2. Element 6 is divided into
elements 6 and 7, that are
joined to elements 3 and 4
through the common
node 2.
10
Boundary Condition Sets (BCSs)
or Restraints
For the FE equations to have a solution (you must be able to compute [K]-1),
the BCS must be valid!
A valid or allowable BCS must prevent all types of rigid body motion.
In 2D problems there are a total of 3 types of rigid body motion which must
prevented:
a) Two in-plane translations (usually in the x-y plane), and
b) Rotation perpendicular to the plane (usually rotation about the z-direction)
In 3D problems there is a total of 6 types of rigid body motion which must be
prevented:
a) Three translations (along the x, y and z directions), and
b) three rotations (around the x, y and z directions).
11
Rigid Body Motion
Computers approximate forces as a very small number
instead of exactly 0. This will cause rigid body motion
even though we don’t expect a force in that direction.
From the 2D Truss Worksheet
F K u
1 103
750
13
2.037
10
F
750
3
1 10
0
Fx applied (approx. 0)
Fy applied
12
Rigid Body Motion Example
F
F
R1=F
R2=0
R3=Fy
• Fixtures and applied force F are in the x-direction, so
we don’t expect displacement in the y- or z-directions.
• But computers will approximate the y- and z-forces as
a very small number, instead of exactly 0, which will
cause rigid body (sometimes called out of plane)
motion in y- and z-directions.
Therefore, we must apply fixtures in all three
directions to prevent rigid body motion.
13
Example of 2D BCS’s
Motions ?
NO
NO
NO
=> VALID
Motions ?
NO
NO
YES
=> NOT VALID!
Force
14
Condition Number Check
When a BCS is valid, the FE linear equations:
[K]{u} = {F} can be solved.
Previously we have said that these equations cannot be solved
when det[K] = 0; however, in practice this condition needs to be
defined in a more precise normalized manner.
This is because the calculations are usually being performed
approximately (by computer) on very large matrices.
We therefore test a normalized quantity called the Condition
Number (CN) of [K] which is defined by:
n
CN det[ K ] / ( K ) i ,i
i 1
If CN indicated determinant is close to 0 then we conclude that [K]–1
either cannot be computed or the computation is NOT ACCURATE!
15
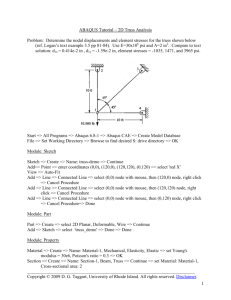
Accurate & Valid Boundary Condition Sets
Example – Truss bridge with supports at its two ends
C
(at pts B and D)
B
D
H
y
z
x
16
C
Alternative BCS
BCS 1): x- and y-translation
fixed at B and D
Not Accurate / VALID B
D
H
C
BCS 2): y-translation fixed
at B and D
Accurate / Not VALID
B
D
H
C
BCS 3): y-translation fixed at B
and x- and y- translation at D
Accurate / VALID
B
D
H
In reality, the actual Boundary Conditions may be somewhere between BCS 1) and
3), because the rollers may not be completely frictionless (effect of dirt, rust etc.)
17
Distributed Loading
1.
2.
3.
4.
5.
Given a load/unit length
e.g., 40 lbf/foot
And span length
e.g., 15 feet
total load = 600 lbf
Given a number of elements
e.g., 3 elements
200 lbf per element!
15 ft
18
Distributed Loading (cont.)
6.
7.
First, consider each element separately…you have
200 lbf per element, so split the force evenly and
apply 100 lbf at each node
Now put the elements back together…
100
100
100
100
100
100
200
200
100
100
19