Slides
advertisement

Informed search algorithms
Chapter 4
Outline
•
•
•
•
•
•
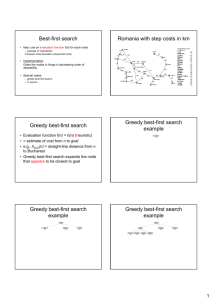
Best-first search
Greedy best-first search
A* search
Heuristics
Local search algorithms
Hill-climbing search
Best-first search
• Idea: use an evaluation function f(n) for each node
– estimate of "desirability"
Expand most desirable unexpanded node
• Implementation:
Order the nodes in fringe in decreasing order of
desirability
• Special cases:
– greedy best-first search
– A* search
Romania with step costs in km
Greedy best-first search
• Evaluation function f(n) = h(n) (heuristic)
= estimate of cost from n to goal
• e.g., hSLD(n) = straight-line distance from n
to Bucharest
• Greedy best-first search expands the node
that appears to be closest to goal
Greedy best-first search
example
Greedy best-first search
example
Greedy best-first search
example
Greedy best-first search
example
Properties of greedy best-first
search
• Complete? No – can get stuck in loops,
e.g., Iasi Neamt Iasi Neamt
• Time? O(bm), but a good heuristic can give
dramatic improvement
• Space? O(bm) -- keeps all nodes in
memory
• Optimal? No
A* search
• Idea: avoid expanding paths that are
already expensive
• Evaluation function f(n) = g(n) + h(n)
• g(n) = cost so far to reach n
• h(n) = estimated cost from n to goal
• f(n) = estimated total cost of path through
n to goal
A* search example
A* search example
A* search example
A* search example
A* search example
A* search example
Admissible heuristics
• A heuristic h(n) is admissible if for every node n,
h(n) ≤ h*(n),
where h*(n) is the true cost to reach the goal state from n.
• An admissible heuristic never overestimates the cost to reach the
goal, i.e., it is optimistic
• Example: hSLD(n) (never overestimates the actual road distance)
• Theorem: If h(n) is admissible, A* using TREE-SEARCH is optimal
Optimality of A* (proof)
• Suppose some suboptimal goal G2 has been generated and is in the
fringe. Let n be an unexpanded node in the fringe such that n is on a
shortest path to an optimal goal G.
f(G2) = g(G2)
> g(G)
= g(n) + d(n,G)
g(n) + h(n)
= f(n)
since h(G2) = 0 (G2 is a goal)
since G2 is sub-optimal
since there is only one path from root to G (tree)
since h is admissible
by definition of f
Hence f(G2) > f(n), and A* will never select G2 for expansion.
Recall that it is only when a node is picked for expansion that we check
if it is goal.
Properties of A*
• Complete?? Yes
• Optimal?? Yes
•
•
•
•
Let C* be the cost of the optimal solution.
A* expands all nodes with f(n) < C*
A* expands some nodes with f(n) = C*
A* expands no nodes with f(n) > C*
A* using Graph-Search
• A* using Graph-Search can produce sub-optimal
solutions, even if the heuristic function is admissible.
• Sub-optimal solutions can be returned because GraphSearch can discard the optimal path to a repeated state
if it is not the first one generated.
Consistent heuristics
• A heuristic is consistent if for every node n, every successor n' of n
generated by any action a,
c(n,a,n') + h(n') h(n)
• If h is consistent, we have
f(n') = g(n') + h(n')
= g(n) + c(n,a,n') + h(n')
≥ g(n) + h(n)
= f(n)
i.e., f(n) is non-decreasing along any path.
• Theorem: If h(n) is consistent, A* using GRAPH-SEARCH is optimal
Optimality under consistency
• Recall: If h is consistent, then A* expands nodes in order
of increasing f value.
• First goal node selected for expansion must be optimal.
– Recall that only when a node is selected for expansion only then it
is tested whether it is a goal state or not.
• Why?
• Because if a goal node G2 is selected later for expansion
than G1 this means that:
– f(G1) f(G2)
– g(G1) + h(G1) g(G2) + h(G2)
• recall h(G1) = h(G2)=0 since G1 and G2 are goal, hence
– g(G1) g(G2)
• which means that G2 is sub-optimal solution.
Straight-Line Distance Heuristic
is Consistent
• Why?
• We know that the general triangle inequality is satisfied
when each side is measured by the straight-line.
• And c(n,a,n’) is greater or equal to the straight-line
distance between n and n’.
– d(n.state, goalstate) d(n’.state, goalstate) + d(n.state, n’.state)
• By Euclidian distance triangle property
• Also recall that
– d(n.state, goalstate) = h(n) and
– d(n’.state, goalstate) = h(n’), and
– d(n.state, n’.state) c(n,a,n’) for any action a. Hence,
– h(n) h(n’) + d(n.state, n’.state) h(n’) + c(n,a,n’)
• I.e. h is consistent.
Admissible heuristics
E.g., for the 8-puzzle:
• h1(n) = number of misplaced tiles
• h2(n) = total Manhattan distance |x1-x2|+|y1+y2|
(i.e., no. of squares from desired location of each tile)
• h1(S) = ?
• h2(S) = ?
Admissible heuristics
E.g., for the 8-puzzle:
• h1(n) = number of misplaced tiles
• h2(n) = total Manhattan distance |x1-x2|+|y1+y2|
(i.e., no. of squares from desired location of each tile)
• h1(S) = ? 8
• h2(S) = ? 3+1+2+2+2+3+3+2 = 18
Why are they admissible?
• Misplaced tiles: No move can get more than one
misplaced tile into place,so this measure is a guaranteed
underestimate and hence admissible.
• Manhattan: In fact, each move can at best decrease by
one the rectilinear distance of a tile from its goal.
Are they consistent?
• c(n,a,n’) = 1 for any action a
• Claim: h1(n) h1(n’) + c(n,a,n’) = h1(n’) + 1
– Now, no move (action) can get more than one
misplaced tile into place.
– Also, no move can create more than one new
misplaced tile.
– Hence, the above follows. I.e. h1 is consistent.
• Similar reasoning for h2 as well.
•
•
•
A* Graph-Search
(without consistent heuristic)
The problem is that sub-optimal solutions can be returned because GraphSearch can discard the optimal path to a repeated state if it is not the first one
generated.
When the heuristic function h is consistent, then we proved that the optimal
path to any repeated state is the first one to be followed.
When h is not consistent, we can still use Graph-Search if we discard the
longer path. We store in the hashtable pairs (statekey, pathcost)
Graph-Search(problem, fringe)
node = MakeNode(problem.initialstate);
Insert(fringe, node);
do
if ( Empty(fringe) ) return null; //failure
node = Remove(fringe);
if (problem.GoalTest(node.state)) return node;
key_cost_pair = Find( closed, node.state.getKey() );
if (key_cost_pair == null || key_cost_pair.pathcost > node.pathcost)
Insert (closed, (node.state.getKey(), node.pathcost) );
InsertAll (fringe, Expand(node, problem) );
while (true);
A* using Graph-Search
• Let’s try it here
Dominance
• If h2(n) ≥ h1(n) for all n (both admissible)
• then h2 dominates h1
• h2 is better for search
–
–
–
–
–
Let C* be the cost of the optimal solution.
A* expands all nodes with f(n) < C*
A* expands some nodes with f(n) = C*
A* expands no nodes with f(n) > C*
Hence, we want f(n) (g(n)+h(n)) to be as big as possible. Since we can’t do
anything about g(n) we are interested in having h(n) as big as possible.
• Typical search costs (average number of nodes expanded):
• d=12
IDS = 3,644,035 nodes
A*(h1) = 227 nodes
A*(h2) = 73 nodes
• d=24
IDS = too many nodes
*
A (h1) = 39,135 nodes
A*(h2) = 1,641 nodes
The max of heuristics
• If a collection of admissible heuristics h1, …, hm is available for a
problem, and none of them dominates any of the others, we create a
compound heuristic as:
– h(n) = max {h1(n), …, hm(n)}
• Is it admissible?
• Yes, because each component is admissible, so h won’t overestimate the distance to the goal.
• If h1, …, hm are consistent, is h consistent as well?
• Yes. For any action (move) a:
c(n,a,n’)+h(n’) =
c(n,a,n’)+ max {h1(n’), …, hm(n’)} =
max {c(n,a,n’)+h1(n’), …, c(n,a,n’)+hm(n’)}
max {h1(n), …, hm(n)} = h(n)
(from consistency of hi)
Relaxed problems
• A problem with fewer restrictions on the actions is called
a relaxed problem
• The cost of an optimal solution to a relaxed problem is
an admissible heuristic for the original problem
• If the rules of the 8-puzzle are relaxed so that a tile can
move anywhere, then h1(n) gives the shortest solution
• If the rules are relaxed so that a tile can move to any
adjacent square, then h2(n) gives the shortest solution
Local search algorithms
• In many optimization problems, the path to the
goal is irrelevant; the goal state itself is the
solution
• State space = set of "complete" configurations
• Find configuration satisfying constraints,
e.g., n-queens
• In such cases, we can use local search
algorithms, which keep a single "current" state,
and try to improve it.
Example: n-queens
• Put n queens on an n × n board with no two
queens on the same row, column, or diagonal
• How many successors from each state?
• (n-1)*n
8-queens problem
• h = number of pairs of queens that are attacking each other, either
directly or indirectly
• h = 17 for the above state
Hill-climbing search
• "Like climbing Everest in thick fog with amnesia"
• Hill-Climbing chooses randomly among the set
of best successors, if there is more than one.
Hill-climbing search
• Problem: depending on initial state, can
get stuck in local maxima
Hill-climbing search: 8-queens problem
• A local minimum with h = 1
Local Minima
• Starting from a randomly generated state of the 8queens, hill-climbing gets stuck 86% of the time, solving
only 14% of problems.
• It works quickly, taking just 4 steps on average when it
succeeds, and 3 when it gets stuck – not bad for a state
space with 88 17 million states.
• Memory is constant, since we keep only one state.
• Since it is so attractive, what can we do in order to not
get stuck?
Random-restart hill climbing
• Well known adage: “If at first you don’t succeed, try, try
again.”
• It conducts a series of hill-climbing searches from
randomly generated initial states, stopping when a goal
is found.
• If each hill-climbing search has a probability p of
success, then the expected number of restarts is 1/p.
• For 8-queens, p=0.14, so we need roughly 7 iterations to
find a goal, i.e. 22 steps (3 steps for failures and 4 for
success)