csp_intro
advertisement

Search (cont) & CSP Intro
Tamara Berg
CS 560 Artificial Intelligence
Many slides throughout the course adapted from Dan Klein, Stuart Russell,
Andrew Moore, Svetlana Lazebnik, Percy Liang, Luke Zettlemoyer
Reminders
• HW1 is due Sept 10
– This will take a significant amount of time. Start
now!
– Anyone still looking for a group?
Recall from last class
Uninformed search
Breadth-first search
• Expansion order:
(S,d,e,p,b,c,e,h,r,q,a,a,
h,r,p,q,f,p,q,f,q,c,G)
Depth-first search
• Expansion order:
(S,d,b,a,c,a,e,h,p,q,
q,r,f,c,a,G)
Properties of breadth-first search
• Complete?
Yes (if branching factor b is finite)
• Optimal?
Not generally – the shallowest goal node is not necessarily
the optimal one
Yes – if all actions have same cost
• Time?
Number of nodes in a b-ary tree of depth d: O(bd)
(d is the depth of the optimal solution)
• Space?
O(bd)
Properties of depth-first search
• Complete?
Fails in infinite-depth spaces, spaces with loops
Modify to avoid repeated states along path
complete in finite spaces
• Optimal?
No – returns the first solution it finds
• Time?
May generate all of the O(bm) nodes, m=max depth of any node
Terrible if m is much larger than d
• Space?
O(bm), i.e., linear space!
Iterative deepening search
• Use DFS as a subroutine
1. Check the root
2. Do a DFS with depth limit 1
3. If there is no path of length 1, do a DFS search
with depth limit 2
4. If there is no path of length 2, do a DFS with
depth limit 3.
5. And so on…
Iterative deepening search
Iterative deepening search
Iterative deepening search
Iterative deepening search
Properties of iterative deepening
search
• Complete?
Yes, when b is finite
• Optimal?
Not generally – the shallowest goal node is not
necessarily the optimal one
Yes – if all actions have same cost
• Time?
(d+1)b0 + d b1 + (d-1)b2 + … + bd = O(bd)
• Space?
O(bd)
Search with varying step costs
• BFS finds the path with the fewest steps, but
does not always find the cheapest path
Search with varying step costs
• BFS finds the path with the fewest steps, but
does not always find the cheapest path
Uniform-cost search
• For each frontier node, save the total cost of
the path from the initial state to that node
• Expand the frontier node with the lowest path
cost
• Implementation: frontier is a priority queue
ordered by path cost
• Equivalent to breadth-first if step costs all equal
Uniform-cost search example
Uniform-cost search example
• Expansion order:
(S,p,d,b,e,a,r,f,e,G)
Uniform-cost search example
• Expansion order:
(S,p,d,b,e,a,r,f,e,G)
Uniform-cost search example
• Expansion order:
(S,p,d,b,e,a,r,f,e,G)
Uniform-cost search example
• Expansion order:
(S,p,d,b,e,a,r,f,e,G)
Uniform-cost search example
• Expansion order:
(S,p,d,b,e,a,r,f,e,G)
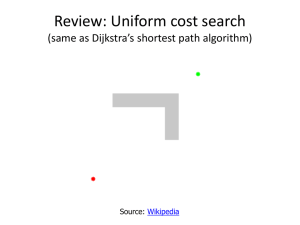
Another example of uniform-cost
search
Source: Wikipedia
Properties of uniform-cost search
• Complete?
Yes, if step costs are greater than some positive constant ε
(gets stuck in infinite loop if there is a path with inifinite
sequence of zero-cost actions)
Optimal?
Yes – nodes expanded in increasing order of path cost
• Time?
Number of nodes with path cost ≤ cost of optimal solution
(C*), O(bC*/ ε)
This can be greater than O(bd): the search can explore long
paths consisting of small steps before exploring shorter
paths consisting of larger steps
• Space?
O(bC*/ ε)
Informed search strategies
• Idea: give the algorithm “hints” about the
desirability of different states
– Use an evaluation function to rank nodes and
select the most promising one for expansion
• Greedy best-first search
• A* search
Heuristic function
• Heuristic function h(n) estimates the cost of
reaching goal from node n
• Example:
Start state
Goal state
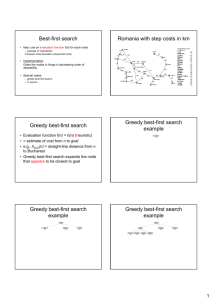
Heuristic for the Romania problem
Greedy best-first search
• Expand the node that has the lowest value of
the heuristic function h(n)
Greedy best-first search example
Greedy best-first search example
Greedy best-first search example
Greedy best-first search example
Properties of greedy best-first search
• Complete?
No – can get stuck in loops (with explored set complete in
finite spaces)
start
goal
Properties of greedy best-first search
• Complete?
No – can get stuck in loops(with explored set complete in
finite spaces)
• Optimal?
No
Properties of greedy best-first search
• Complete?
No – can get stuck in loops(with explored set complete in
finite spaces)
• Optimal?
No
• Time?
• Space?
How can we fix the greedy problem?
Properties of greedy best-first search
• Complete?
No – can get stuck in loops(with explored set complete in
finite spaces)
• Optimal?
No
• Time?
Worst case: O(bm)
Can be much better with a good heuristic
• Space?
Worst case: O(bm)
A* search
• Idea: avoid expanding paths that are already expensive
• The evaluation function f(n) is the estimated total cost
of the path through node n to the goal:
f(n) = g(n) + h(n)
g(n): cost so far to reach n (path cost)
h(n): estimated cost from n to goal (heuristic)
A* search example
A* search example
A* search example
A* search example
A* search example
A* search example
Another example
Source: Wikipedia
Uniform cost search vs. A* search
Source: Wikipedia
Admissible heuristics
• An admissible heuristic never overestimates the cost
to reach the goal, i.e., it is optimistic
• A heuristic h(n) is admissible if for every node n,
h(n) ≤ h*(n), where h*(n) is the true cost to reach
the goal state from n
• Is straight line distance admissible?
– Yes, straight line distance never overestimates the actual
road distance
Optimality of A*
• Theorem: If h(n) is admissible, A* is optimal
• Proof by contradiction:
– Suppose A* terminates at goal state n with f(n) = g(n) = C
but there exists another goal state n’ with g(n’) < C
– Then there must exist a node n” on the frontier that is on
the optimal path to n’
– Because h is admissible, we must have f(n”) ≤ g(n’)
– But then, f(n”) < C, so n” should have been expanded first!
Properties of A*
• Complete?
Yes – unless there are infinitely many nodes with f(n) ≤ C*
• Optimal?
Yes
• Time?
Number of nodes for which g(n)+h(n) ≤ C*
• Space?
Number of nodes for which g(n)+h(n) ≤ C*
Designing heuristic functions
• Heuristics for the 8-puzzle
h1(n) = number of misplaced tiles
h2(n) = total Manhattan distance (number of squares from
desired location of each tile)
h1(start) = 8
h2(start) = 3+1+2+2+2+3+3+2 = 18
• Are h1 and h2 admissible?
Dominance
• If h1 and h2 are both admissible heuristics and
h2(n) ≥ h1(n) for all n, (both admissible) then
h2 dominates h1
• Which one is better for search?
– A* search expands every node with f(n) < C* or
h(n) < C* – g(n)
– Therefore, A* search with h1 will expand more nodes
Dominance
• Typical search costs for the 8-puzzle (average number of
nodes expanded for different solution depths):
• d=12
IDS = 3,644,035 nodes
A*(h1) = 227 nodes
A*(h2) = 73 nodes
• d=24
IDS ≈ 54,000,000,000 nodes
A*(h1) = 39,135 nodes
A*(h2) = 1,641 nodes
Heuristics from relaxed problems
• A problem with fewer restrictions on the actions is called
a relaxed problem
• The cost of an optimal solution to a relaxed problem is an
admissible heuristic for the original problem
• If the rules of the 8-puzzle are relaxed so that a tile can
move anywhere, then h1(n) gives the shortest solution
• If the rules are relaxed so that a tile can move to any
adjacent square, then h2(n) gives the shortest solution
Heuristics from subproblems
• Let h3(n) be the cost of getting a subset of tiles
(say, 1,2,3,4) into their correct positions
• Can pre-compute and save the exact solution cost for every
possible sub-problem instance – pattern database
Combining heuristics
• Suppose we have a collection of admissible heuristics
h1(n), h2(n), …, hm(n), but none of them dominates
the others
• How can we combine them?
h(n) = max{h1(n), h2(n), …, hm(n)}
A* Solving Tile Puzzle
A* Playing Mario
Mario Playing A*
search
All search strategies
Time
complexity
Space
complexity
Algorithm
Complete?
Optimal?
BFS
Yes
If all step
costs are equal
O(bd)
O(bd)
DFS
No
No
O(bm)
O(bm)
IDS
Yes
If all step
costs are equal
O(bd)
O(bd)
UCS
Yes
Greedy
A*
Yes
Number of nodes with g(n) ≤ C*
No
No
Worst case: O(bm)
Best case: O(bd)
Yes
Yes
(if heuristic is
admissible)
Number of nodes with g(n)+h(n) ≤ C*
Intro to CSPs
Constraint Satisfaction Problems
(Chapter 6)
What is search for?
• Assumptions: single agent,
deterministic, fully observable,
discrete environment
• Search for planning
– The path to the goal is the
important thing
– Paths have various costs, depths
• Search for assignment
– Assign values to variables while
respecting certain constraints
– The goal (complete, consistent
assignment) is the important thing
Constraint satisfaction problems (CSPs)
• Definition:
– Xi is a set of variables {X1 ,… Xn}
– Di is a set of domains {D1 ,... Dn} one for each variable
– C is a set of constraints that specify allowable
combinations of values
– Solution is a complete, consistent assignment
Example: Map Coloring
• Variables: WA, NT, Q, NSW, V, SA, T
• Domains: {red, green, blue}
• Constraints: adjacent regions must have different colors
e.g., WA ≠ NT, or (WA, NT) in {(red, green), (red, blue),
(green, red), (green, blue), (blue, red), (blue, green)}
Example: Map Coloring
• Solutions are complete and consistent assignments,
e.g., WA = red, NT = green, Q = red, NSW = green,
V = red, SA = blue, T = green
Example: n-queens problem
• Put n queens on an n × n board with no two queens in the
same row, column, or diagonal
Example: N-Queens
• Variables: Xij
• Domains: {0, 1}
• Constraints:
i,j Xij = N
(Xij, Xik) {(0, 0), (0, 1), (1, 0)}
(Xij, Xkj) {(0, 0), (0, 1), (1, 0)}
(Xij, Xi+k, j+k) {(0, 0), (0, 1), (1, 0)}
(Xij, Xi+k, j–k) {(0, 0), (0, 1), (1, 0)}
Xij
N-Queens: Alternative formulation
• Variables: Qi
• Domains: {1, … , N}
• Constraints:
i, j non-threatening (Qi , Q j)
Q1
Q2
Q3
Q4
Example: Cryptarithmetic
• Variables: T, W, O, F, U, R
X1, X2
• Domains: {0, 1, 2, …, 9}
• Constraints:
O + O = R + 10 * X1
W + W + X1 = U + 10 * X2
T + T + X2 = O + 10 * F
Alldiff(T, W, O, F, U, R)
T ≠ 0, F ≠ 0
X2 X1
Example: Sudoku
• Variables: Xij
• Domains: {1, 2, …, 9}
• Constraints:
Alldiff(Xij in the same unit)
Xij