18th European Symposium on Computer Aided Process Engineering – ESCAPE 18
Bertrand Braunschweig and Xavier Joulia (Editors)
© 2008 Elsevier B.V./Ltd. All rights reserved.
Dynamic behaviour of the CSTR: a thermodynamic
point of view
A. Favachea, D. Dochaina, B. Maschkeb
a
b
Université catholique de Louvain (IMAP-CESAME), Louvain-la-Neuve, Belgium
Université Lyon 1 (LAGEP) , Villeurbanne, France
Abstract
Chemical processes are systems in which many different phenomena take place: heat
transfer, chemical reactions… The resulting dynamic behaviour may thus show
complex features, like multiple steady states with different stability characteristics for
example. Our aim is to develop a new approach for the understanding of the dynamical
behaviour of thermodynamical systems, starting from the physical phenomena and
linking them to the system theory. This should give us the basis for developping more
physically insightful controllers for such systems.
Keywords: CSTR, thermodynamics, entropy production, Lyapunov
1. Introduction
Control theory is largely based on the concept of stability “à la Lyapunov” which was
initially largely justified in terms of system energy. Because it was mainly considered in
the context of mechanical and electrical systems, this had led to the use of quadratic
functions as Lyapunov function candidates, since these can be easily justified as energy
system functions. More generally speaking, stability analysis of nonlinear systems
requires the use of abstract mathematical tools such as the two Lyapunov methods for
instance. This can result in a loss of information stemming from the physics of the
system. In most cases, the analysis of the dynamical behaviour and the control design of
a dynamical system are performed by starting from the dynamical equations of the
system and by considering them as a differential equation system. The further
computations do not need any more links with the physics. This is for example what has
been done in [1] where Lyapunov functions for the CSTR have been found by
systematic construction methods, yet the obtained functions have no physical
interpretation.
Beside the equations expressing the dynamics of the system, the physics can give more
insightful information that may be useful for the analysis of its dynamical behaviour.
This is particularly true for chemical reaction systems. For those systems, the dynamical
equations are given by balance equations. But the laws of thermodynamics provide
complementary information like the mass conservation that helps us to exhibit
invariants of the system, or the second thermodynamic law that provides a function that
is always non-negative along the trajectories. Our aim is therefore to develop a new
viewpoint and angle for the stability analysis and control design of chemical reactors
that could more specifically be linked to and based on the physics.
In this work, a simple but comprehensive example of a chemical reactor is considered: a
continuous stirred tank reactor (CSTR) with an exothermic reaction. Depending on the
parameters of such a reactor, this system can exhibit multiple steady states. The
objective is to interpret the stability, the region of attraction etc. of these steady states in
terms of some thermodynamic functions. Contrary to most of the studies made on such
2
A.Favache et al.
reactors, we shall consider as few as possible assumptions when writing the dynamical
model. In order to do so, we start from the balance equations on the extensive quantities
for writing our model. This endows our approach with a certain generality because it
can be easily transposed to any other thermodynamical system.
As already mentioned, we shall first establish the dynamical model of the CSTR in
section 2. We shall then analyze in section 3 the dynamical behaviour of the CSTR by
considering some thermodynamic quantities and studying them within the framework of
the Lyapunov’s theory.
2. The dynamical model of the CSTR
2.1. Description of the study case
We consider an ideal completely stirred tank reactor (CSTR) in liquid phase in which
following exothermic reaction takes place: AB. In the reactor, the reactant A and the
product B are diluted in an inert I, while only A and I are present in the feed. The
volume of the liquid is maintained constant. Moreover the liquid volume V is assumed
to be independent of the diluted quantities of A and B. It is only linked to the quantity of
I in the reactor: nI=CIV where nI is the number of moles of I and CI is the constant
concentration of I in the reactor. Therefore nI is a constant. A cooling fluid at constant
temperature Tw circulates in a jacket to cool the reactor. The reaction rate r is a function
only of the temperature T and of the concentration of A. Since the volume is constant,
this means that r can be written as a function of T and nA where nA is the number of
moles of A in the reactor. The heat exchanged between the reactor and the jacket is
proportional to the temperature difference between the cooling fluid and the reactor
where the proportionality constant is noted h. The time evolution of the state is assumed
to be a quasi-static process. Finally the molar heat capacity cv of each species is
constant.
2.2. Dynamic model and steady states
The dynamical behaviour of the CSTR is governed by the incoming and outgoing flows
as well as by the reaction. Therefore the dynamical model is given by balance equations
on the extensive quantities, i.e. the volume V, the number of moles of each component
ni and the internal energy U.
The conservation of energy indicates that the balance equation for internal energy is
given by the difference between the ingoing and outgoing powers as follows:
q
dU
qcvin Tin T q C Ain u 0, A C I u 0, I U hT Tw
dt
V
(1)
in
in
where c v C A c v , A C I c v , I is the specific heat of the incoming stream and u0,j is the
molar internal energy of species j at the reference temperature T0.
For the number of moles of A and B, convection and reaction have to be taken into
account. The resulting balance equations are given by following differential equations:
dn A q in
dt V C A V n A r T , n A V
dnB q n r T , n V
B
A
dt
V
(2)
Dynamic behaviour of the CSTR: a thermodynamic point of view
3
The dynamic model for the behaviour of the CSTR is given by equations (1) and (2). In
order to withdraw the dependence in T and to have only three unknowns in those three
equations, it is necessary to add the expression of internal energy for an ideal fluid,
which is given by following relation:
U T , n A , n B
n c T T u
j
v, j
0
0, j
(3)
j A, B , I
It can be shown that, depending on the parameters of the system, there are up to three
steady states. Here we shall concentrate on the three steady states case. It can be shown
by Lyapunov’s first method that only the steady state with the intermediate temperature
is unstable. The two other ones (low and high temperature) are locally asymptotically
stable.
3. Stability analysis using Lyapunov’s theory
Lyapunov’s theory allows in particular to determine the region of attraction of the stable
equilibria. Our aim is to look how the thermodynamic principles can be used for finding
a Lyapunov function that will provide a physical interpretation of the stability properties
of the steady states and to determine the regions of attraction of each stable steady state.
3.1. Study of the entropy and its production rate in the CSTR
Simply speaking, a Lyapunov function is a function that is decreasing along the
trajectories and is minimum (or maximum) at the steady state. This means that the
derivative along the trajectories of this function is negative (resp., positive). Therefore,
we are looking for either a quantity that is decreasing (resp. increasing), or either a
quantity that is negative (resp. positive) and can be integrated along the trajectories.
The second principle of thermodynamics states that the entropy production σS is always
positive. The integration of the entropy production along the trajectories should give us
a candidate for a Lyapunov function. This function W(X) would be such that the
following relation is fulfilled (with X=[U, nA, nB ] the state vector):
S
T W dX
X dt
(4)
For an isolated system, this function exists because the entropy production is equal to
the entropy variation. This one is related to the state by Gibbs’s relation which is of the
form of Eq. (4). Therefore the state with maximal entropy is a stable steady state and the
entropy is a suitable Lyapunov function. Unfortunately in open systems such as the
CSTR, the entropy production rate is not equal to the entropy variation, since there are
incoming and outgoing entropy fluxes:
S
T S dX in Q
dS in Q
FS
FSout
FS
FSout
dt
Tw
Tw
X dt
(5)
where FSin and FSout are the incoming and outgoing entropy fluxes due to convection and
Q is the thermal power transferred to the reactor. The entropy production rate is no more
an exact differential of a function of the state and consequently not the derivative along
the trajectories of a Lyapunov function candidate.
In the case of the CSTR, an explicit expression of the entropy production σS can be
found by replacing the balance equations (1) (2) into equation (5). This allows to
4
A.Favache et al.
identify the following entropy sources: mixing, reaction, heat transfer by conduction
and heat transfer by convection.
The entropy can also not be a suitable Lyapunov function since it is not increasing along
the trajectories, due to the incoming and outgoing entropy fluxes.
The second principle has not led us to a suitable Lyapunov function. An other principle
in thermodynamics could be used: the minimum entropy production principle states
that, under certain conditions, the entropy production rate is minimum at steady state in
open systems and can thus be used as a Lyapunov function. All systems fulfilling the
Onsager reciprocity relations are of this kind, but there exists also other systems where
the entropy production rate is a suitable Lyapunov function [4][5]. Let us make a similar
analysis on the CSTR case. Using Gibbs’s expression, the entropy production rate given
by Eq. (5) can be expressed as follows:
T S
X
S
F
in
X
FXout
X
T S
n
T S
U
n
X
X
1
Tw
Q F in F out
S
S
(6)
where FXi=[FUi,FAi,FBi] T (the index indicates the concerned quantity), and σ=[-1 ] TrV.
Using the fact that the entropy is a homogeneous function of degree 1 of the state, the
entropy production rate is given by the following equation:
T S
S
X
X
T S
X
X in
T
F in S
X
n
T S
U
n
X
X
1
Tw
Q
(7)
The time derivative of this quantity along the trajectories is given by following
equation:
d S d T X 2 S dX T S
dt
dt X 2 dt U
X
1
Tw
T Q dX T S
X dt
n
X
n dX
X dt
(8)
where the Gibbs-Duhem relation has been used to simplify the expression. In the case of
the flash separator presented in [5], only the first term exists and the decrease of the
entropy production rate is ensured by the concavity of the entropy function. In the
CSTR the first term is negative, but the sign of the two other terms cannot be
determined. The multiplicity of the steady states and the instability of one of them is
linked to the heat transfer by conduction and to the chemical reaction: without these
phenomena, the system would have one globally stable steady state. Indeed, from the
four entropy sources cited before, only these two are contained in the supplementary
terms in Eq. (8). This means that mixing and heat transfer by convection are contained
in the first term of Eq. (8) which tends to make the steady state stable.
3.2. Study of the energy in the CSTR
The intuitive explanation for the stability/instability properties of the steady states is
based on the thermal energy. The dynamic equation for the temperature can be obtained
from equations (1) to (3) and is given as follows:
c
j A, B , I
v, j n j
dT
hT
dt
w
T qcvin Tin T r T , n A V r H T
(9)
Dynamic behaviour of the CSTR: a thermodynamic point of view
5
where (-rH)(T) is the heat of reaction. From this expression, we define the following
function:
eq T r T , n eq
A T r H hT Tw
q in
cv T Tin
V
(10)
where the function n eq
A T is the single value of nA that cancels the dynamics of nA in
Eq. (2). This is the steady state value of nA in an isothermal CSTR at that given
temperature. It can be shown that if the dynamics of nA is infinitely fast compared to
the dynamics of temperature, i.e. n A n eq
A T at each instant, then the square of
eq T is decreasing along the trajectories in regions around the two stable steady
states, whereas it is increasing around the unstable steady state. It must be noted that
this function is linked to the rate of transformation of binding energy into thermal
energy.
Yet, in the general case, the function 2eq T cannot be considered as a global
Lyapunov function, since different behaviours of this function may occur, depending on
the initial value of nA. Nevertheless, it can be worth to analyse what happens if the
initial values of the pair (T,nA) are restricted to a limited set of the positive orthant.
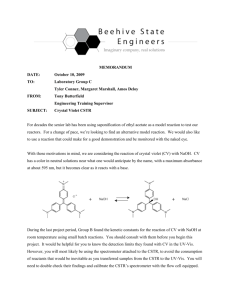
First let us consider the domain where 2eq T is decreasing, and analyse if it contains
invariants sets (with the objective to possibly apply the LaSalle theorem). This domain
is composed of two disconnected subsets, as it can be seen on Figure 1. In the
following, we shall only consider the subset D1 around T1 , but the case around T3 is
totally similar. D1 is not an invariant set. Indeed let us consider the following part of its
boundary:
D1 T , n A , n B T T1 , n A n eq
A T
(11)
where T1 T2 T3 are the temperature values at each equilibrium. Along these subsets,
the vector tangent to the trajectories moves away from the set D1.
In order to find out invariants sets of the system or attraction domains for the steady
states, let us split the plane (T,nA) into different zones in which the time variation of nA
and T are analysed. Let us define nˆ A T as the value of nA for which the time
derivative of T given by Eq. (9) is equal to zero, i.e.:
eq
hTw T qcvin Tin T r T , nˆ eq
A T V r H T 0
(12)
The curve representing nˆ A T obviously crosses the curve representing n eq
A T at
eq
each steady state. It can be shown that nˆ A T is increasing for low and high
temperatures whereas it is decreasing at intermediate temperatures. Similarly to the
eq
curve of n A T which is delimiting zones of the plane where the quantity of A is
eq
increasing or decreasing, the curve of nˆ A T is delimiting zones of increasing and
decreasing temperatures. This is schematically represented in Figure 2.
eq
6
A.Favache et al.
From Figure 2 , we can identify two invariant sets around each stable steady state. If we
denote by Tmax the temperature corresponding to the local maximum of nˆ eq
A T , both
invariants are delimited by the following curves:
T T2
eq
X 1 n A max nˆ A T for 0 T Tmax
n nˆ eq T for T T T
A
max
2
A
nA
n eq
A T
D1
(13)
nA
nˆ eq
A T
n eq
A T
D1
0
0
temperature
Figure 1 : Set D1
temperature
Figure 2 : Phase plane
4. Conclusion and further work
The different considered Lyapunov function candidates provide new insight and
physical interpretation in the stability/instability of the equilibrium points of the CSTR.
The different phenomena that take place are closely interconnected such that
considering only one principle of thermodynamics at once is not sufficient to interpret
completely the dynamic behaviour. It follows that it is necessary to combine together
the principles in order to find a Lyapunov function that takes each physical phenomenon
into account.
Acknowledgements The work of A. Favache is funded by a grant of aspirant of Fonds
National de la Recherche Scientifique (Belgium). This paper presents research results of the
Belgian Network DYSCO (Dynamical Systems, Control, and Optimization), funded by the
Interuniversity Attraction Poles Programme, initiated by the Belgian State, Science Policy Office.
The scientific responsibility rests with its authors.
References
[1] R.B. Warden, R. Aris, N.R. Amundson, 1964, An analysis of chemical reactor stability and
control, Chemical Engineering Science, 19, pp. 173-190
[2] H. Khalil, Nonlinear systems, 3rd edition, Prentice Hall, 2002
[3] G. Beretta, E. Gyftopoulos, 2004, Thermodynamic derivations of conditions for chemical
equilibrium and of Onsager reciprocal relations for chemical reactors, Journal of chemical
physics, 121, pp.2718-2728
[4] J.M. Tarbell, 1977, A thermodynamic Liapunov function for the near equilibrium CSTR,
Chemical Engineering Science, 32, pp. 1471-1476
[5] P. Rouchon, Y. Creff, 1993, Geometry of the flash dynamics, Chemical Engineering Science,
48, pp. 3141-3147
[6] A.Favache, Themodynamique et commande des procédés: l’entropie comme outil de synthèse
et d’analyse des systèemes de commande, Rapport de confirmation de thèse, Université
catholique de Louvain, 2007