FANUC Robotics is one of the biggest manufacturers in the field of
advertisement

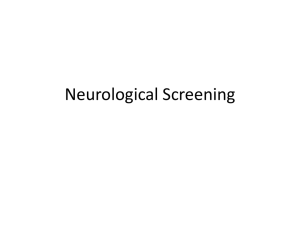
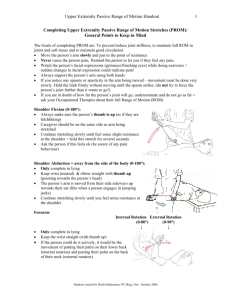
About The Robot: FANUC Robotics is one of the biggest manufacturers in the field of robotics and automation systems and has over 160,000 industrial robots installed worldwide so we considered taking one of the FANUC robots to be our case of study. We choose the FANUC S-900W because it is a popular robot in industry world wide, The S-900 series is engineered for precision, high speed/high payload operation, user friendly set and maximum reliability. This robot is a six-axis, modular construction, electric servo-driven designed for a variety of manufacturing and system processes. This is a small robot footprint and reduced controller size conserves floor space. Its slim arm and wrist assemblies minimize interference with system peripherals and allow operation in confined spaces. The large wrist allows moments and inertias meet a variety of heavy handling challenges. The stationary outer arm simplifies hose and cable dress out, which prolongs service life. This particular servo drive provides highest uptime and productivity and its re bust mechanical design reduces down time, increases meantime between failure and minimizes spare part requirements. Also provides longer maintenance intervals equate to lower operating costs. Its high performance motion yields fast cycle times and high throughput. Specifications of FANUC S-900W: PAYLOAD: 200kg REPEATABILITY: ±0.5 DRIVE SYSTEM: AC Servo Motor REACH: 2488mm MAXIMUM SPEED: ARM ARM ARM 300 ° sec 115 ° sec 145 ° sec WRIST WRIST WRIST Applications: • Material Handling • Spot Welding • Large sheet, panel or glass handling • Casting operations 720 ° sec 250 ° sec 720 ° sec Benefits: • Multiple controller type and mounting capabilities • Slim profile design • RV reducers for all axes • Process/application cables routed through the arm • No motors at wrist Control: • Quick change amplifier<5min • Fast boot time(<30sec) • Easy connections to a variety of I/O, including I/O networks Software: • Web-based software tools for remote connectivity, diagnostics and production monitoring • Machine vision for robot guidance and inspection The FANUC S-900W Position Analysis of the Fanuc S-900W Robot Figure 1 shows a 6-dof manipulator manufactured by Fanuc. The coordinate frames are also shown in the diagram. The last three joint axes intersect one another at a common point P, called wrist center, which is d4 distance away from point C. The kinematics problem of this manipulator can be partitioned into two sections, one associated with the first three moving links and the other with the last three moving links. This division is useful in solving inverse kinematics where the position of the wrist center becomes independent of the hand orientation. FIGURE (1): The FANUC S-900W Transformation matrices: If the end effecter location is given by: The overall transformation matrix is obtained in two steps: The resulting overall transformation matrix is given by: Substituting (2) and (3) the resulting components of the overall transformation matrix are given by: The equations above can be used to obtain general solutions for all the joint angles in terms of the given position variables. However, it is clear that the general solutions require solving highly nonlinear equations. In addition the existence of multiple solutions makes the analysis further complex. The simplified method aims at splitting the problem from wrist center position as described below. The method follows two main steps, first the wrist center position is defined and the first half of joint angles is determined using this position. In the second part end effecter orientation is considered to determine the remaining joint angles. (a) Wrist Center Position The transformation is then given by: Therefore: (4) Given the end-effector position, we can determine the wrist center position with respect to the base frame. Further we observe from the configuration, that wrist center position with respect to frame 3 also can be expressed as: Transforming this into base coordinates, we can write: (6) Or: The above equation (7) can be expanded to obtain three independent equations. The equation (7) decouples the six variable problems to three variable problems. In order to simplify further, multiply both sides of (6) by the inverse of From the forward matrices we obtain: Substituting (4), (5), (9) and (10) to, we get: Expansion of (11) would now yield three independent equations: Where Px, Py and Pz is given by (4) From (14) we straight away obtain angle (theta 1) as: To solve the other two angles: This may be written in compact form as: Using the relation: And substituting in (16): Expansion of (11) would now yield three independent equations: From (14) we straight away obtain angle (theta 1) as: By taking square of the three equations and by addition them together will eliminate most of variables: We obtain: This may be written as: The above can be formed into an quadratic equation given by: While knowing (theta 1) and (theta 3) equations (12) and (13) can be rearranged to as: Where: From (18) and (19) we obtain: Therefore: Knowing that Theta1 and Theta 3 have a second solution with 90 degrees difference. (b) End-Effector Orientation: The first par of wrist center analysis has solved the joint angles 1, 2 and 3, and the transformation is now completely known. The remaining joint angles can be obtained by solving the orientation of the transformation given by: For this part of the analysis we use orientation only. Therefore: From (3): And the orientation can be extracted as: Therefore: Substituting into (21) we obtain: Where the right side of equation (22) is now completely known: Where theta5 have two solutions one is the negative of the other. Therefore: And: