M10_problems_ans
advertisement

PHYS2012/2912
MAGNETIC PROBLEMS
ANSWERS
M014
(a) Linear part B-H curve. For an iron sample, the relationship
between B and H is given by a hysteresis curve. But for soft iron
materials, for small values of H, B is proportional to H.
B = r 0 H
(b)
m
B.dA 0
B
(0,0)
H
B just keeps going right around
the loop; no magnetic monopoles.
Ignore any fringe effects in the gap so that m iron = m gap B = Bcore = Bgap
(c)
Apply ampere’s law to a circular loop inside the core
H .dL N I
H iron ( L d ) H gap d N I
H gap
B
H iron
B
0
r (1 m ) r 0
B
r 0
B
(L d )
B
0
dNI
r 0 N I
L d r d
B
(d)
d 0 B Bmax = 0 N I / L
(e)
Permanent magnet
B and H are in same direction outside the magnet
1
Inside the magnet: H
B M and the lines of H point in a direction opposite to
o
d
M and B . There are no free currents, the magnet is magnetized all by itself.
B dA 0 the magnetic field lines for B must be continuous, the lines just keep
going on (there are no magnetic monopoles). H is demagnetizing, can get large B
more easily with electromagnet. Toroidal permanent magnet: Hiron and Hgap are in
opposite directions. Since H is demagnetizing, it is a good idea to place an iron keep
between the poles.
M10_problems_ans.doc
7 sep 2010
1
Electromagnet
H and M are in same direction, H helps B large.
Miron
Hiron
PERMANENT MAGNET
B
B, Hgap Mgap = 0
B = Bgap = Biron
ELECTROMAGNET
Miron
Hiron
B
B, Hgap Mgap = 0
B = Bgap = Biron
(f)
H .dL 0
H iron ( L d ) H gap d 0
H gap
B
0
H iron
B
0
M
B
B
M (L d ) d 0
0
0
M L d
B 0
L
If L >> d (L - d)/L = 1 B = µ0 M
H core ( L d ) H gap d
Hiron and Hgap are in opposite directions.
Assumed Biron = Bgap
M10_problems_ans.doc
7 sep 2010
2
(g)
L = 0.350 m
A = 1.65×10-4 m2
Miron = 1.25×105 A.m-1
d = 0.02 m
0 = 410-7 N.A-2
B
(h)
Hiron = ? A.m-1 m = ? T.m-2
Hgap = ? A.m-1
B=?T
0 M L d
B 0 H M
L
HB
0 M
m B A
B = 0.15 T Hgap = -7.1×103 A.m-1
Hiron = 1.2×105 A.m-1
N = 1000
for air m = 0
B = 0.15 T
B r 0 H
B
I
HB
r 0 N I
L d r d
I=? A
Mgap = 0 A.m-1
m = 9.0×102 T.m-2
for iron m = 100
r m 1
r 0
B L d r d
r 0 N
Iair = 41 A
Iiron = 2.7 A
Need a much smaller current for a give magnetic field of the electromagnet with an
iron core.
A soft magnetic material is used in the core of an electromagnet so that when the
current is switched off, the material in the core looses its magnetic properties very
quickly – the material has a very small value for its residual magnetism.
M102
(a)
+
+
+
+
+
+
+
-
-
-
w
I
-
-
-
-
-
-
-
t
B
Silver charge carriers are negative (electrons)
Right hand rule electrons are deflected down bottom of slab is negative
M10_problems_ans.doc
7 sep 2010
3
(b)
A steady-state situation is reached: zero net force on charge carriers
Magnetic force = Electric Force
Bev e E
Bv
VH
w
I nev A nev w t
I
B
new t
IB
n
t eVH
v
I
new t
VH
w
(c)
t = 1.0010-3 m
VH = 0.33410-6 V
B = 1.25 T
n
(d)
w = 1510-3 m
n = ? carriers.m-3
IB
5.96 1028 carriers.m -3
t eVH
nAg = ? atoms.m-3
= 10.5103 kg.m-3
nAg
(e)
I = 2.55 A
NA
M
M = 107.910-3 kg.mol-1
NA = 6.021023 mol-1
5.86 1028 atoms.m -3
The number density of silver atoms is nearly equal to the number density of the
charge carriers. This result indicates that the number of charge carriers in silver is
very nearly one per atom.
M169
Use Amperes’s Law for a loop around the permanent magnet (i = 0)
H ds i
H iron (2 r a ) H air (a ) 0
In the air gap H air
B
o
or B = o Hair this field is perpendicular to the plane surfaces of the
ring, and the perpendicular component of the B field is constant at an interface, so B is
constant throughout the ring.
In the air B and H are in the same direction but are in opposites directions in the iron.
M10_problems_ans.doc
7 sep 2010
4
H iron
a
a
H air
B
2 r a
(2 r a) o
Putting in the numbers
B = 1.05 T
r = 0.25 m
a = 1810-3 m
0 = 410-7 T.m.A-1
Hair = 8.4103 A.m-1
Hiron = -9.7103 A.m-1
M10_problems_ans.doc
7 sep 2010
5
M174
Hall Effect: Charge carriers moving in a magnetic field experience a force, moving them to
one side of a conductor (Edwin Hall, U.S.A. 1879). This provides a way for determining the
sign of charge carriers in a current and a Hall probe can be used to precisely measure the
magnitude of a magnetic field or determine the number density of the charge carriers.
(a) and (b)
Assume the current is in a positive X direction with an average drift velocity v and with the
magnetic field B in the Z direction. The width of the probe is w and the thickness is t.
Y
X
+
Z
+
+
+
+
+
+
-
w
I
-
-
-
-
B
-
-
-
-
-
t
charge carriers are electrons for copper
Right hand rule electrons are deflected down
bottom of probe is negative
The magnetic force experienced by the charge carriers (negative electrons q = -e) moving in
the –X direction is
Fm ( e )v B e v B j
Therefore negative charges move in the –Y direction producing a charge separation across
the conductor that produces an electric field transverse to the direction of the current I.
Hence, the bottom of the probe is negative (right hand rule).
Fe e E j
Steady state:
Fe Fm
E vB
The potential difference across the conductor of width w is
B
VB VA E ds E w VHall
A
| VHall | = v w B
But I = n e v A v = I / (n e A) = I / (n e w t) where A = w t
M10_problems_ans.doc
7 sep 2010
6
VHall
IB
net
(c)
n
IB
t eVHall
From the measurements of I, B, t and VHall
number density of charge carriers n
(d)
thickness, t = 125 m = 12510-6 m
Hall probe width, w = 20 mm = 2010-3 m
I = 25 A
e = 1.610-19 C
VHall = 11 V = 11 10-6 V
B=? T
n = ? charge carriers.m-3
= 8.93103 kg.m-3
NA = 6.021023 mol-1
M = 63.5 g.mol-1 = 6.3510-2 kg.mol-1
Assume one conduction electron per copper atom
mass of one copper atom, m = M / NA
=Nm/V=nm
n = / m = NA / M = 8.4981028 charge carriers.m-3
B
n e tVHall
= 0.75 T
I
M10_problems_ans.doc
(Earth magnetic field ~ 510-5 T)
7 sep 2010
7
M245
Assume magnetization is uniform inside magnet.
M
H
B
B and H are in same direction outside the magnet
Inside the magnet: H
1
B M and the lines of H point in a direction opposite to M and
o
B.
There are no free currents, the magnet is magnetized all by itself.
B dA 0
the
magnetic field lines for B must be continuous, the lines just keep going on (there are no
magnetic monopoles).
M10_problems_ans.doc
7 sep 2010
8
M269
N = 5000 r = 800 0 = 410-7 T.m.A-1
path length around ring L = 2.00 m width of gap Lgap = 20 m = 0.02 m
path length for iron LFe = 1.98 m magnetic field in gap Bgap = 0.50 T
In gap Hgap = ? A.m-1
In iron BFe = ? T HFe = ? A.m-1
current i = ? A
MFe= ? A.m-1
B dA 0
H ds i
B H o r H o H M
M m H
f
In the gap
Bgap = o Hgap
Hgap = Bgap / o = 3.98105 A.m-1
don’t mix numbers & units
B must be continuous since we can ignore “bulging”
Gauss’s law
B dA 0
- BFe A + Bgap A = 0
A
A
Bgap = BFe
Bgap
BFe
Gaussian
surface
B = BFe = Bgap= 0.5 T
B H o r H o H M
H Fe
M Fe
B
o r
B
o
4.97 102 A. m -1
H Fe 3.97 105 A.m-1
Alternatively
M Fe m H Fe 3.97 105 A.m-1
H ds i
Ampere’s Law
5
m = r - 1
f
-1
Hgap = 3.9810 A.m
Lgap = 0.02 m
HFe = 4.97102 A.m-1
LFe = 0.18 m
N = 5000
H gap Lgap H Fe LFe N i i 1.7 A
M10_problems_ans.doc
Amperian
surface
current outside
integration loop
integration
loop
current cutting
Amperian surface
7 sep 2010
9
M282
N = 200
L = 0.50 m
m = 4.0010-4 T.m-2.
A = 4.0010-4 m2
µ0 = 410-7 T.m.A-1
(a)
Hysteresis Curve for an Iron sample
Saturation of M
2.0
1.5
retentivity (remanence)
1.0
MH
B (T)
0.5
0.0
coercivity
-0.5
-1.0
retentivity (remanence)
-1.5
-2.0 of M
Saturation
-100
-50
0
H
50
100
(A.m-1)
Area enclosed = energy dissipated in a cycle in reversing the magnetic domains
(b)
The required B-field is
m 4 104
B
T 1.0 T
A 4 104
(c)
Air core
B dl
o ienclosed
m
o N Ai
L
i
L m
2000 A
o N A
(d)
Iron core
When the magnetic material is added to the core, the current will induce a magnetic field
called the magnetization M in the core, in the same direction as Bo. The resulting magnetic
field will be the sum of these fields
Bo o H
B o ( H M ) H
where is the permeability of the core.
The required B-field is B = 1.0 T
From the hysteresis curve (magnetization part), the required H-field is H = 25 A.m-1
H depends on the current i
M10_problems_ans.doc
7 sep 2010
10
H dl
Ni
free
i
HL
0.063 A (much smaller than with no core)
N
(e)
At this point the permeability is
B
1
4.0 102 T.m.A 1
H 25
and the relative permeability is
r
3.2 10 4
0
(f)
Gap
a = 1.0010-3 m
When the gap in the iron is introduced, we need to apply Ampere’s Law for the H-field
H dl H iron ( L a) H air a N i
The gap is assumed to be very small and so B is the same in the iron as the gap
B
B
B H iron o H air H iron
H air
o
Combining these last two equations
B La a
i
4.0 A
N
o
(g)
Note the values for the current I the three cases are
2000A 0.063 A and 4.0 A
When there is no iron core, much larger currents are required to give the required magnetic
field. Introducing a gap means that a greater current is required to produce the same magnetic
flux.
M10_problems_ans.doc
7 sep 2010
11
M295
Magnetic force on + charges
(a)
artery
+
+++++++
+
E
direction of blood flow
V
-
common
-------
Magnetic force on - charges
Magnetic field B
directed into page
(b)
Blood moving from left to right: magnetic force on positive charges is up and magnetic force
on negative charges is down (right hand rule).
Magnetic force on charge q is Fm = q v B
Charge separation gives rise to an electric field E across the artery opposing further charge
separation
Electric force on charge q is Fe = q E
A steady state situation is reached when Fe = Fm v B = E
The electric field E is related to the potential difference across the artery (diameter d)
V=Ed=vBd
(c)
Therefore, the velocity of the blood is v = E / B = V / (d B)
The volume flow rate of the blood is dVol/dt = A v
B = 1.50010-3 T d = 5.200 mm = 5.20010-3 m
V = 2.52 V = 2.5210-6 V
v = V / (d B) = (2.5210-6) / {(5.20010-3)( 1.50010-3)} m.s-1 = 0.323 m.s-1
A = (d/2)2
dVol/dt = A v = (5.20010-3 /2)2(0.323) m3.s-1 = 6.8610-6 m3.s-1
M10_problems_ans.doc
7 sep 2010
12
M301
magnetic dipole moment
pm i A
m
B
+i
A
i
FB
m
FB
out of page
B
right hand
palm rule
FB '
i
The resultant force on the current loop is zero but there is a torque that tends to align up
m pm and B .
The forces all pull the current elements outwards.
The force on each current element is
F = BiL
B
B large
B small
Forces F3 and F4 cancel.
F1 > F2 since the B-field is non uniform, the Bfield larger on the left than the right. So there is a
net force that pulls the magnetic dipole towards
the region of larger magnetic field.
m
F4
F1
Square shape? NO – the properties only depend
upon pm and A .
F2
F3
i
M314
(a)
Alignment of all iron N atoms in the needle would give a magnetic dipole moment of N Fe.
Since only 10% of the atoms are aligned
pm = 0.10 N pmFe
We need to find the number of iron atoms, N then the magnetic dipole moment pm
Volume, V = (30)(1)(0.50)10-9 m3 = 1.5010-8 m3
mass of iron m = V = (7900)( 1.5010-8) kg = 1.1910-4 kg
mass of 1 mole iron = 55.84910-3 kg
1 mole contains NA molecules, NA = 6.021023
no. of moles of iron , n = (1.1910-4) / (55.84910-3) = 2.1210-3
number of iron atoms, N = n NA = (2.1210-3)( 6.021023) = 1.281021
pm = 0.10 N Fe = (0.1)(1.281021)(2.110-23) J.T-1 = 2.6810-3 J.T-1
M10_problems_ans.doc
7 sep 2010
13
(b)
The needle of the compass is free to rotate only horizontally and since the magnetic dipole
moment of the needle is directed along its length, the horizontal component of the Earth’s
magnetic field exerts a torque about the needle’s pivot point when the needle is displaced by
a small angle to return it to its equilibrium position
B Bh sin Bh
Since the motion can be described as angular simple harmonic motion:
m L2
I
12
m L2
pm Bh T 2
2
12 pm Bh
I
Rearranging
Bh
m L2 2
3 pm T 2
m = 1.1910-4 kg
L = 0.03 m
T = 2.2 s
= 2.6810-3 J.T-1
Bh = 2.710-5 T
M342
Y
Current in Z direction
Current in – Z direction
X
R
r
B
d
ds
In the presence of a magnetic medium, Ampere’s Law becomes
H dl i
B
M
B r 0 H
0
For a circular loop of radius r
Ni
Ni
H
B r 0
2 r
2 r
r =1500 N = 3000 r = 0.40 m
H
M r 1 H
M r 1
Ni
2 r
i = 1.6 A
B = 3.6 T M = 2.9106 A.m-1
M10_problems_ans.doc
7 sep 2010
14
M378
Electron moving
into page
Assume current out of page
for inner conductor and into
page for outer conductor
with the inner conductor at
the higher potential
Fe on electron
a
r
Fe = Fm
b
Fm on electron
B
E
If the inner cylinder is at a positive potential with respect to the outer cylinder, the electric
field E is directed radially outwards. If we assume that current flows into the page along the
inner cylinder and out of the page along the outer cylinder, the magnetic field will be directed
clockwise as shown.
Proofs -------------------------------------------------------------------* Construct a Gaussian surface that is a cylinder of radius r and length L, coaxial with the
inner cylinder that has a linear charge density of . The charge contained within the Gaussian
surface is then L. Using Gauss’s Law
E.dA
qenclosed
E 2 r L
o
L
E
o
2 o r
* Now E V but since E is radial and varies only with r, E = -dV/dr. Thus the potential
is found by integrating E(r) with respect to r
a
V Va Vb E.ds
b
2 o
b
a
1
a
dr
ln
r
2 o b
* By symmetry the magnetic field must be azimuthal and it can be calculated by using
Ampere’s Law
B ds
o
i B
o i
2 r
End proofs----------------------------------------------------------------------------------
M10_problems_ans.doc
7 sep 2010
15
2 o r
a
Potential difference V between the conductors V
ln
2 o b
Electric field E in the region between the conductors E
Combining these two equations to eliminate gives
E
V
a
r ln
b
The magnetic field B varies with r as
o
2 r
Consider an electron traveling with velocity v into the page, at a radial distance r from the
axis of the cylinders. It experiences an electric force Fe = e E radially inward, and a magnetic
force FM = B e v radially outwards. For the electron to be un-deviated, these forces must
balance so that v = E / B, hence
2 V
B
v
a
o i ln
b
This equation is independent of r, so the electron's position does not matter. Putting in the
values:
v = 7.8105 m s-l
If the electron is to describe a helical path about the axis, the net force acting upon it must be
of constant magnitude, and directed radially inwards (and this is "clearly possible given the
orientations of the fields). This will provide the necessary centripetal acceleration for the
circular component of the motion, while the fact that the force has no component parallel to
the axis will give the electron a steady component of velocity parallel to the axis.
M415
Apply Ampere’s Law
H
dl i f
Since the current is uniformly distributed over a cross-section
r2
r R if
I
R2
Inside the wire
r2
r R H inside 2 r 2 I
R
Outside the wire
r
B H r 0 H
m B dA
R
H outside 2 r I
Binside
r 0 r I
2 R2
H outside
outside
rI
2 R2
I
2 r
H inside
0 I
2 r
B dA B dA 0 m 0
B is in the azimuthal direction whereas A is directed along the axis of the wire.
M10_problems_ans.doc
7 sep 2010
16
M439
(a)
Sketch the magnetic field surrounding a long solenoid carrying a DC current.
Magnetic field similar to a bar magnet
For a very long solenoid, the magnetic field
can be considered to be confined to the
region inside the coils.
(b)
H = ? A.m-1 B = ? T
L = 86410-3 m R = 1410-3 m
0 = 410-7 T.m.A-1
N = 666
I = 4.56 A
Long solenoid
B 0 n I 0
H
(c)
B
0
N
666
I 4 107
4.57 T 4.42 103 T
3
L
864 10
N
4.42 103
I
A.m -1 3.52 103 A.m -1
L
4 107
A cylindrical piece of iron of radius 2.5 mm and relative permeability 123 was placed
along the axis of the solenoid. Calculate the H and B fields inside the iron and in the
air gap between the iron core and solenoid windings.
r = 2.510-3 m
Hgap = ? A.m-1
r = 123
HFe = ? A.m-1
Bair = ? T
BFe = ? T
The H-field is only determined by the current through the coils of the solenoid the
H field is the same in the gap as in the iron
H = Hgap = HFe = 3.52103 A.m-1
The B-field is given by B r 0 H
In the gap
In the iron
Bgap 0 H 4.42 103 T
B r 0 H 123 4.42 103 T 5.43 101 T
M10_problems_ans.doc
7 sep 2010
17
M470
(a)
The charge on the capacitor plates at time t is given by
Q CVo 1 e
t
so the charge density on the plates is
Q C Vo
t
1 e
A
A
where A = a2 is the area of the plates and the time constant is = R C. By Gauss's theorem
the charge density is
= o E
where E is the electric field between the plates, and since the displacement current density jd
is equal to the rate of change of
jd
Vo
d CVo t
t
e
e
2
dt
A
a R
(b)
To find the magnetic flux density B between the plates we can apply Ampere's circuital
theorem. If we consider a circular loop of radius r concentric with the capacitor, it links a
total displacement current
Displacement current id
Amperean loop of radius r
Direction of B
r 2 Vo t
id r jd 2 e
a R
2
M10_problems_ans.doc
7 sep 2010
18
Ampere’s theorem
B ds B 2 r
B
o
and since there are no free currents i = id
i
o rVo t
e
2 a 2 R
(c)
The condition that >> a / c implies that the energy stored in this magnetic field can be
ignored in comparison with the energy stored in the electric field between the plates. The
maximum energy Ue stored in the electric field when the capacitor is fully charged is (C Vo2 /
2). The maximum energy UM stored in the magnetic field can be found by integrating the
energy per unit volume (B2 / 2o) over the volume at time t = 0
1 o Vo
UM
2o 2 a 2 R
2
2
a
0
1 o Vo d 2 a 4
r 2 r d dr
2o 2 a 2 R
4
2
Now R = / C >> a / ( cC)
o d
o d C c 2 1
UM
~
U e 8 R 2 C
8 a 2
8
M10_problems_ans.doc
7 sep 2010
19
M507
(a)
Use right hand palm rule – a positive charged particle is bent (circular path) in the opposite
direction to a negatively charged particle. The H2+ ion has a much larger radius of curvature
compared with an electron. The H2+ ions will travel in a anti-clockwise direction
B
I
+q
F
B
out of page
B
right hand
palm rule
I
right hand screw rule
Cyclotron
(b)
ac voltage accelerates charges across gap. Oscillator frequency independent of v and R.
Magnetic field can not increase the kinetic energy of the ions since the direction of the
magnetic force on the charges is always at right angles to the direction of motion of the
charged particle. Only the electric field between the dees produces an acceleration.
(c)
Magnetic force = centripetal force
m v2
Fm q v B sin q v B
Fc
R
(d)
period = circumference / speed
T
2 R 2 m v 2 m
v
vqB
qB
f
R
mv
qB
1
qB
T 2 m
cyclotron frequency
(e)
1 2 1 q2 B 2 R 2
K mv
2
2
m
(f)
m B A B R 2
m
L mv R
B
mv
qR
L
q
M10_problems_ans.doc
7 sep 2010
20
(g)
d = 1.00 m B = 2.00 T q = 2e m = 2 mp
e = 1.60210-19 C mp = 1.6710-27 kg
1 eV = 1.60210-19 J
1 MeV = 1.60210-13 J
Frequency of rf source = cyclotron frequency
f
qB
1.52 107 Hz 15.2 MHz
2 m
Max speed of ion
R = d/2
1 2 1 q2 B2 R2
mv
2
2
m
qBR qBd
v
4.8 107 m.s-1
m
2m
K
Max KE of ion
1 q2 B2 R2 1
K
m v 2 24 MeV
2
m
2
v / c = 0.16
relativistic effects are not important
Cyclotrons can work because the cyclotron frequency does not depend on either the radius or
the velocity component perpendicular to the magnetic field
qB
.
m
Therefore, a set of identical particles have identical cyclotron frequency, irrespective of the
initial condition. The magnetic field in each of the semicircular parts takes the particles
through half a circle and the particles then get accelerated in the small gaps. The field that is
responsible for the acceleration needs to flip sign every half period, and thus it has to be an ac
voltage. Since the cyclotron frequency is constant, this voltage is set equal to the cyclotron
frequency. The particles are injected at low energies in the centre and upon being accelerated,
their orbits get larger, until they are ejected when the radius approaches that of the
semicircular parts.
M10_problems_ans.doc
7 sep 2010
21
M562
(a)
By symmetry, the magnetic field must be independent of the position along the axis
(Z direction) and an the azimuthal angle . All positions z and for all angles are
equivalent and so the magnetic field can’t depend on either.
L
Bz
Bz
dA1
dA2
Br
dA3
B dA 0
B dA B dA B dA 0
S1
S2
Bz A Bz A Br (2 r L) 0 Br 0
(b)
(c)
S2
Ampere’s Law
B dl B
z
dz Br dr B r d 0 I enclosed integration path A
Bz1
Br = 0
Ienclosed = 0
d 0
x
I
A
Bz2
s
B dl
Bz1 s Bz 2 s 0 Bz constant
But as r Bz 0 Bz 0
(d)
Ampere’s Law
B dl B
z
outside solenoid
dz Br dr B r d 0 I enclosed integration path B
single turn of wire with current I
B
outside loop Bz = 0
M10_problems_ans.doc
around integration loop B
dr = 0 and Br = 0
7 sep 2010
22
Outside the solenoid (r > R)
0 I
2 r
Inside the solenoid when r < R, Ienclosed = 0 B = 0
Ampere’s Law B dl Bz dz Br dr B r d 0 I enclosed integration path C
B dl B r d 2 r B
(e)
(f)
0
B
I
Bz1 = 0
C
Br = 0
Ienclosed = n s I
x
x
x
d 0
I
Bz2
s
Ienclosed = 0
x
I
x
x
Bz1 = 0
Bz2
B dl
Bz 2 s 0 n s I
Bz 2 0 n I
For the integration loop inside the solenoid
B dl Bz1s Bz 2 s 0 Bz1 Bz 2 Bz constant
Bz 0 n I
The magnetic field is constant inside the solenoid (assume far from the ends).
Z
B
B
B y Bz
Bx
Br
Y
X
M10_problems_ans.doc
7 sep 2010
23
M587
Magnets are very common items in the workplace and household. Uses of magnets range from holding pictures
on the refrigerator to causing torque in electric motors. Most people are familiar with the general properties of
magnets but are less familiar with the source of magnetism. The traditional concept of magnetism centers
around the magnetic field and what is know as a dipole. The term "magnetic field" simply describes a volume
of space where there is a change in energy within that volume. This change in energy can be detected and
measured. The location where a magnetic field can be detected exiting or entering a material is called a
magnetic pole. Magnetic poles have never been detected in isolation but always occur in pairs and, thus, the
name dipole. Therefore, a dipole is an object that has a magnetic pole on one end and a second equal but
opposite magnetic pole on the other.
A bar magnet can be considered a dipole with a north pole at one end and south pole at the other. A magnetic
field can be measured leaving the dipole at the north pole and returning the magnet at the south pole. If a magnet
is cut in two, two magnets or dipoles are created out of one. This sectioning and creation of dipoles can continue
to the atomic level. Therefore, the source of magnetism lies in the basic building block of all matter...the atom.
All matter is composed of atoms, and atoms are composed of protons, neutrons and electrons. The protons and
neutrons are located in the atom's nucleus and the electrons are in “constant motion” around the nucleus.
Electrons carry a negative electrical charge and produce a magnetic field as they move through space. A
magnetic field is produced whenever an electrical charge is in motion. The strength of this field is called the
magnetic moment.
This maybe hard to visualize on a subatomic scale but consider electric current flowing through a conductor.
When the electrons (electric current) are flowing through the conductor, a magnetic field forms around the
conductor. The magnetic field can be detected using a compass. The magnetic field will place a force on the
compass needle, which is another example of a dipole. Since all matter is comprised of atoms, all materials are
affected in some way by a magnetic field. However, not all materials react the same way.
mu N i An magnetic dipole moment Direction – right hand screw rule
M
dm
dVol
average magnetic dipole moment per unit volume
Diamagnetic, Paramagnetic, and Ferromagnetic Materials
When a material is placed within a magnetic field, the magnetic forces of the material's electrons will be
affected. This effect is known as Faraday's Law of Magnetic Induction. However, materials can react quite
differently to the presence of an external magnetic field. This reaction is dependent on a number of factors such
as the atomic and molecular structure of the material, and the net magnetic field associated with the atoms. The
magnetic moments associated with atoms have three origins. These are the electron orbital motion, the change
in orbital motion caused by an external magnetic field, and the spin of the electrons. In most atoms, electrons
occur in pairs. Each electron in a pair spins in the opposite direction. So when electrons are paired together, their
opposite spins cause there magnetic fields to cancel each other. Therefore, no net magnetic field exists.
Alternately, materials with some unpaired electrons will have a net magnetic field and will react more to an
external field. Most materials can be classified as ferromagnetic, diamagnetic or paramagnetic.
Diamagnetic metals have a very weak and negative susceptibility to magnetic fields. Diamagnetic materials are
slightly repelled by a magnetic field and the material does not retain the magnetic properties when the external
field is removed. These materials produce a magnetic moment which has a direction that they oppose the field
already present. Diamagnetic materials are solids with all paired electron and, therefore, no permanent net
magnetic moment per atom. Diamagnetic properties arise from the realignment of the electron orbits under the
influence of an external magnetic field. Most elements in the periodic table, including copper, silver, and gold,
are diamagnetic.
B o (1 m ) H m 0 M m H o (1 m )
m(argon) ~ -1.010-8
m(copper) ~ -1.010-5
M10_problems_ans.doc
7 sep 2010
24
Paramagnetic metals have a small and positive susceptibility to magnetic fields. These materials are slightly
attracted by a magnetic field and the material does not retain the magnetic properties when the external field is
removed. Paramagnetic properties are due to the presence of some unpaired electrons and from the realignment
of the electron orbits caused by the external magnetic field. Paramagnetic materials include magnesium,
molybdenum, lithium, and tantalum.
B o (1 m ) H m 0 M m H o (1 m )
m(oxygen) ~ 2.010-6
m(aluminum) ~ 2.110-5
B
B
Permeability
= slope of B-H line
H
H
Diamagnetic material
m < 0 (small)
Ideal magnetic material
or paramagnetic material
m > 0 (small)
B = o (1+ m ) H
B = o r H = H
= constant
Ferromagnetic materials have a large and positive susceptibility to an external magnetic field. They exhibit a
strong attraction to magnetic fields and are able to retain their magnetic properties after the external field has
been removed. Ferromagnetic materials have some unpaired electrons so their atoms have a net magnetic
moment. They get their strong magnetic properties due to the presence of magnetic domains. In these domains,
large numbers of atomic moments (1012 to 1015) are aligned parallel so that the magnetic force within the
domain is strong. When a ferromagnetic material is in the unmagnitized state, the domains are nearly randomly
organized and the net magnetic field for the part as a whole is zero. When a magnetizing force is applied, the
domains become aligned to produce a strong magnetic field within the part. Iron, nickel, and cobalt are
examples of ferromagnetic materials.
B o ( H M ) Magnetization is not proportional to the applied field
m(ferrite) ~ 100
m(iron) ~ 1000
M10_problems_ans.doc
7 sep 2010
25
The Hysteresis Loop and Magnetic Properties
A great deal of information can be learned about the magnetic properties of a material by studying its hysteresis
loop. A hysteresis loop shows the relationship between the induced magnetic flux density B and the magnetizing
force H. It is often referred to as the B-H loop. An example hysteresis loop is shown below.
[Note: this diagram is incorrect: B does not become saturated only M does]
The loop is generated by measuring the magnetic flux B of a ferromagnetic material while the magnetizing force
H is changed. A ferromagnetic material that has never been previously magnetized or has been thoroughly
demagnetized will follow the dashed line as H is increased. As the line demonstrates, the greater the amount of
current applied (H+), the stronger the magnetic field in the component (B+). At point "a" almost all of the
magnetic domains are aligned and an additional increase in the magnetizing force will produce very little
increase in magnetic flux. The material has reached the point of magnetic saturation. When H is reduced back
down to zero, the curve will move from point "a" to point "b." At this point, it can be seen that some magnetic
flux remains in the material even though the magnetizing force is zero. This is referred to as the point of
retentivity on the graph and indicates the remanence or level of residual magnetism in the material. (Some of
the magnetic domains remain aligned but some have lost there alignment.) As the magnetizing force is reversed,
the curve moves to point "c", where the flux has been reduced to zero. This is called the point of coercivity on
the curve. (The reversed magnetizing force has flipped enough of the domains so that the net flux within the
material is zero.) The force required to remove the residual magnetism from the material, is called the coercive
force or coercivity of the material.
As the magnetizing force is increased in the negative direction, the material will again become magnetically
saturated but in the opposite direction (point "d"). Reducing H to zero brings the curve to point "e." It will have
a level of residual magnetism equal to that achieved in the other direction. Increasing H back in the positive
direction will return B to zero. Notice that the curve did not return to the origin of the graph because some force
is required to remove the residual magnetism. The curve will take a different path from point "f" back the
saturation point where it with complete the loop.
M10_problems_ans.doc
7 sep 2010
26
From the hysteresis loop, a number of primary magnetic properties of a material can be determined.
1.
2.
3.
4.
5.
Retentivity - A measure of the residual flux density corresponding to the saturation induction of a
magnetic material. In other words, it is a material's ability to retain a certain amount of residual
magnetic field when the magnetizing force is removed after achieving saturation. (The value of B at
point B on the hysteresis curve.)
Residual Magnetism or Residual Flux - the magnetic flux density that remains in a material when the
magnetizing force is zero. Note that residual magnetism and retentivity are the same when the material
has been magnetized to the saturation point. However, the level of residual magnetism may be lower
than the retentivity value when the magnetizing force did not reach the saturation level.
Coercive Force - The amount of reverse magnetic field which must be applied to a magnetic material
to make the magnetic flux return to zero. (The value of H at point C on the hysteresis curve.)
Permeability, - A property of a material that describes the ease with which a magnetic flux is
established in the component.
Reluctance - Is the opposition that a ferromagnetic material shows to the establishment of a magnetic
field. Reluctance is analogous to the resistance in an electrical circuit.
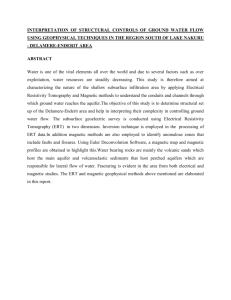
Magnetic Domains
Ferromagnetic materials get their magnetic properties not only because their atoms carry a magnetic moment but
also because the material is made up of small regions known as magnetic domains. In each domain, all of the
atomic dipoles are coupled together in a preferential direction. This alignment develops as the material develops
its crystalline structure during solidification from the molten state. Magnetic domains can be detected using
Magnetic Force Microscopy (MFM) and images of the domains like the one shown below can be constructed.
Magnetic Force Microscopy
(MFM) image showing the
magnetic domains in a piece
of heat treated carbon steel.
During solidification a trillion or more atom moments are aligned parallel so that the magnetic force within the
domain is strong in one direction. Ferromagnetic materials are said to be characterized by "spontaneous
magnetization" since they obtain saturation magnetization in each of the domains without an external magnetic
field being applied. Even though the domains are magnetically saturated, the bulk material may not show any
signs of magnetism because the domains develop themselves are randomly oriented relative to each other.
Ferromagnetic materials become magnetized when the magnetic domains within the material are aligned. This
can be done my placing the material in a strong external magnetic field or by passes electrical current through
the material. Some or all of the domains can become aligned. The more domains that are aligned, the stronger
the magnetic field in the material. When all of the domains are aligned, the material is said to be magnetically
saturated. When a material is magnetically saturated, no additional amount of external magnetization force will
cause an increase in its internal level of magnetization.
Un-magnetized Material
M10_problems_ans.doc
Magnetized Material
7 sep 2010
27
Magnetic field around a bar magnet
Permeability
As previously mentioned, permeability is a
material property that describes the ease with
magnetic flux is established in the component.
ratio of the flux density to the magnetizing
and, therefore, represented by the following
equation:
which a
It is the
force
B
H
It is clear that this equation describes the
slope of
the curve at any point on the hysteresis loop. The permeability value given in papers and reference materials is
usually the maximum permeability or the maximum relative permeability. The maximum permeability is the
point where the slope of the B/H curve for unmagnetized material is the greatest. This point is often taken as the
point where a straight line from the origin is tangent to the B/H curve.
The relative permeability r is arrived at by taking the ratio of the material's permeability to the permeability
in free space (air) o.
r = /
The shape of the hysteresis loop tells a great
about the material being magnetized. The
hysteresis curves of two different materials are
in the graph.
M10_problems_ans.doc
deal
shown
7 sep 2010
28
Relative to the other material, the materials with the wide hysteresis loop has:
Lower Permeability
Higher Retentivity
Higher Coercivity
Higher Reluctance
Higher Residual Magnetism
The material with the narrower loop has:
Higher Permeability
Lower Retentivity
Lower Coercivity
Lower Reluctance
Lower Residual Magnetism.
What is wrong with
this diagram and
diagram above?
M670
(a) Apply Ampere’s Law about the circumference of length L
Ni
H .ds N i H L N i H L
Assume that the iron in the Rowland ring is operated in the linear region so that
Ni
B H r o H r o
L
The magnetic flux is
m B dA B A
r o A N i
L
Putting in the numbers
L = 0.500 m A = 4.0010-4 m2
B = 0.746 T
N = 450
i = 1.20 A
r = 550
m = 2.9910-4 T.m-2 (Wb) o = 410-7 T.m.A-1
M10_problems_ans.doc
7 sep 2010
29
Let a = 2.010-2 m be the width of the gap. Now B is the same inside the iron and in
the gap.
(b)
Apply Ampere’s Law about the circumference of length L
H .ds N i
H Fe ( L a ) H gap a N i
B BFe Bgap o H gap o r H Fe
H gap
B
r
B
o r
3.25 102 T
a
o A N i
La
r
H Fe
o
o N i
La
m
B
1.30 105 T.m 2 (Wb)
a
M736
relative permeability r
1000
o
atomic dipole moment pm = 2 B
o r 1000
Bohr magneton uB
density of iron = 7860 kg.m-3
atomic mass number molar mass MA = 5610-3 kg
M = ? A.m-1
M
H = ? A.m-1
B=? T
total magnetic dipole N
m n 2u B
volume
V
e
9.311024 A.m 2
2m
identify unknowns & SI units
n the number of dipoles per unit volume
Dimensions are correct [m-3 .A.m2 ]=[A.m-1 ]
The number of dipoles per unit volume is equal to the number density of iron atoms.
mass of a single iron atom, m
Avogadro’s number, NA = 6.021023
molar mass, MA
mass of iron, mtot volume of iron, V density of iron, no. iron atoms, N
number density of iron, n = N / V
MA = NA m mtot = N m = MA(N / NA)
= mtot / V = MA (N/V) / NA = n MA /NA
n = NA / MA = 8.41028 atoms.m-3
magnetization M = 2 n uB = 2 NA uB / MA = 1.57106 A.m-1
M = m H H = M / m = M / (r - 1) = 1.57103 A.m-1
B = o r H = 1.97 T
M10_problems_ans.doc
7 sep 2010
30
M780
N
M872
(a)
The magnetic field at the centre of a coil of radius R with one turn is found from the BiotSavart Law:
dB
o i dL R
i dL
dB o 2
3
4 R
4 R
since dL and R are at right angles to each other. For N turns and integrating dB
B N dB N
i = 30 A
o N i
o i
o i
dL
N
2
R
4 R 2
4 R 2
2R
N = 15
R = 0.20 m
B = 1.4110-3 T
Direction of B in Z direction, if current anticlockwise in XY plane (Right Hand Screw Rule)
Y
X
Z
i
B
M10_problems_ans.doc
7 sep 2010
31
(b)
Magnetic field B
~ confined within coils
N turns:
Current i
Direction of B from
Right Hand Screw Rule
B0
start
dL
C
B=0
L
Consider the rectangular contour C shown in the figure. It encloses a total current of N i
where i is the current through the wire and N is the number of turns. By Ampere’s Law
C
B ds B L 0 0 0 o N i
B
o N i
L
N = 1000
i = 15 A
L = 0.25 m
B = 7.5410-2 T
(c)
The magnetic field B throughout the coil will not deviate appreciably from its value at the
mean radius r of the torus, if the torus width d, is much less than its average circumference 2
r. The direction of B is clockwise (Right Hand Screw Rule). Applying Ampere’s Law around
the circle with radius r, we get
o N i
B.ds o N i B 2 r and m B A
Putting in the numbers
B=?T
m = ? T.m-2
L = 2 r = 0.25 m
A = (d/2)2 = 10-3 m2
B = 7.5410-3 T
m = 7.54 T.m-2
M10_problems_ans.doc
N = 100
7 sep 2010
i = 15 A
32
Y
Current in Z direction
Current in – Z direction
X
R
r
B
d
ds
M919
L = 0.150 m
m = 0.0200
i = 2.00 A. N = 1000
o = 410-7 T.m.A-1
(a) and (b) Relative and absolute permeability
r = (1 + m) = 1.02
= r o = 1.2810-6 T.m.A-1
(c) Using Ampere’s Law
H .ds i
free
H
Ni
1.33 104 A.m 1
L
(d) Magnetization
M = m H = 267 A.m-1
(e) Magnetic field
B = H = o(H + M) = 0.0171 T
M10_problems_ans.doc
7 sep 2010
33
M961
r = 200
I = 3.00 A
B=? T
H = ? A.m-1
n = 700 turns.m-1
M = ? A.m-1
m = ?
assume no hysteresis
Hin (inside iron core) Hgap (gap between coil windings & iron core) Hout (completely outside electromagnet).
Magnetic field of electromagnet confined to region inside the solenoid’s coil Bout = 0 and Hout = 0.
The H field is simply determined by the current i in the solenoid windings
Solenoid with iron core
Gap region
Inside solenoid (gap)&
iron
Iron core
oHin
H = Hgap = Hin
(field determined by current)
Mgap = 0 Min > 0
Bgap = oHgap
Bin = oHin + oMin
Hin = Hgap = H
Bin
i
c
Bgap
i
d
s
oHgap
Hout = 0
a
b
i
i
Outside solenoid
oMin
Bout = 0 and Hout = 0
Coil windings
Apply Ampere’s law to a loop abcd
H ds n s i
0 H s 0 0 nsi
H ni (700)(3) A.m 1 2.1103 A.m 1
Bgap o H (4 107 )(2.1103 ) T 2.6 103 T
Bin r Bg ap (200)(2.6 103 ) T = 0.53 T
Mgap = 0
Bin o H o M in r o H
M in r 1 H m H (199)(2.1103 ) A.m1 4.2 105 A.m 1
m r 1 199
These numbers are typical of an electromagnet. Notice the importance of the iron core: this is why iron has
been so important to development of technological based electricity.
M10_problems_ans.doc
7 sep 2010
34
M978
d-state l = 2
ml = -2 -1 0 1 2
The angular momentum of the electron is quantized. Assume that the external magnetic field
B = Bz directed in the +Z direction. The orbital magnetic moment of an electron is given by
eL
e
pm
ml uB ml
2m
2m
e
9.27 1024 A.m 2 is called the Bohr magneton
where uB
2m
The potential energy of a magnetic dipole in a magnetic field is
U pm B ml uB B
Therefore, the energy level is split into 5 separate levels with the state ml = 0 corresponding
to the original energy level value.
uBB = (9.2710-24)(2) J = 18.5410-24 J = (18.5410-24/1.60210-19) eV = 1.210-4 eV
The energy levels are
E5 = + 2uBB = + 2.410-4 eV
E4 = + uBB = + 1.210-4 eV
E3 = 0
E2 = - uBB = - 1.210-4 eV
E1 = - 2uBB = - 2.410-4 eV
M10_problems_ans.doc
7 sep 2010
35
M988
magnetization
M = 1.5105 A.m-1
electrons aligned
nm = ? electrons.m-3
number density Co
nCo = ? atoms.m-3
aligned electrons per atom
N = nm / nCo = ?
density of Co
= 8.9103 kg
molar mass Co
MCo = 58.910-3 kg
Avogadro’s number
NA = 6.021023 mol-1
uB
e
9.27 1024 A.m 2
2m
The magnetic dipole moment due to the electron spin
pm = uB = 9.2710-24 A.m2
M nm pm
M
1.5 105
nm
electrons.m-3 1.6 1028 electrons.m-3
pm 9.27 1024
nCo
6.02 1023
M Co
8.9 103
atoms.m-3 9.1 1028 atoms.m-3
3
NA
58.9
10
Total number of aligned electrons per atom is
N
nm 1.6 1028
0.18
nCo 9.1 1028
M10_problems_ans.doc
7 sep 2010
36