ReadMeFirst,Experime.. - Worcester Polytechnic Institute
advertisement

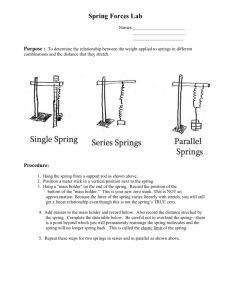
Worcester Polytechnic Institute PH 1140; Term B, 2007 Experiment #3: Mass-Spring Oscillator ReadMeFirst, Experiment #3, Part 1, Measurement of Spring Constants. Today you will continue working with the ever-tantalizing mass-spring system, but this time withOUT the various combinations of springs in series and in parallel as in the past. This time all of your work will be done with a single spring so that you can more easily focus on other aspects of the behavior of the mass-spring oscillator. At your station there is a tall ring stand with a Vernier Dual-Range Force Sensor attached to a cross-bar located up near the top. Make sure that the Force Sensor switch is set in the ±10 N position. There is also a Vernier Motion Sensor looking straight up at the Force Sensor from its position on the lab bench directly underneath the Force Sensor. Also at your station you should find one spring, a 50-g mass hanger, and several slotted masses (1 50-g and 5 100-g). First measure the mass of the spring, the mass hanger, and the slotted masses on one of the mass balances available in your lab room today. After you measure the mass of the spring (about 6 g?), measure the mass of the hanger-plus-50-g-slotted-mass combination, and then add additional masses in 100-g increments, measuring the total mass each time, until you reach a total of 600 g. The total mass at each measurement should be within ½ g of an integer number of 100-g units – if it is not, ask your lab instructor for a properly-sized replacement mass. Record the spring mass on your Data Sheet for future reference. (Later you can use ½ g as the slotted mass uncertainty, unless you measured deviations from stated values consistently and substantially less that ½ g in magnitude.) Hang the spring from the hook at the bottom of the Force Sensor, and from the bottom end of the spring hang the mass hanger (with NO slotted masses aboard!). Damp out any motion of the hanger so that it provides a nice stable reference plane for zeroing the Motion Sensor (provided that the hanger plate is NOT tilted from the horizontal as it hangs from the spring). Open the SpringConstant Logger Pro template, also contained in this Part 1 Folder. Click on the Zero button up on the main tool bar (a bit right of center). When the Zero Sensor Calibration box opens, click on OK. (This will zero both sensors!) Add the 50-g slotted mass to the mass hanger. Damp out any up-down or side-to-side motion of the hanger. When it is quite stationary, click the “Collect” button (which then becomes a “Stop” button), and also click the “Keep” button. Then add a 100-g mass to the hanger, damp out any hanger motion, click “Keep,” and continue adding mass 100 g at a time until you have reached a total mass of 600 g. Again click “Keep” for the last mass, and then click “Stop” to end the data collection. IMPORTANT NOTE!!! Always handle the slotted masses so as NOT to drop them on the Motion Sensor below. Hold the slotted masses firmly until they are securely on the mass hanger, and if hooking or unhooking the hanger from the spring while slotted masses are on the hanger, be sure to cup your hand around the masses as well as the hanger during that hooking or unhooking process. Determine the spring constant of the single spring in the usual way! Click on the “R=” button on the tool bar. Note that the six datum points you have collected sit on a straight line with very little deviation from that line. That is testament to the LINEARITY of the spring! If you see significant deviation between any points and the straight line, delete that set of datum points and try again – to delete a previous set, click on “Data” (left of center on the upper tool bar), and then click on the bottom-most choice of that menu, which is stated as “Clear All Data.” Right-click on the data box and within the Linear Fit Options select 5 under Displayed Precision and check the Show Uncertainty box. After you close that box, you will find the slope, complete with uncertainty, both presented to 5 figures. Record on your Data Sheet the spring constant with uncertainty. (Later on it will be up to you to write down this spring constant in proper form – uncertainty rounded to one digit unless the lead digit itself is 1, in which case you round to two digits; then round the spring constant to the same decimal place as the right-most digit of the uncertainty – on your Lab Report). This ends Part 1. Close this folder and open the Part 2 folder.