Appendix E – Multi-well Oscillator Frequency Analysis
advertisement

Title Page
Nonlinear Dynamics Laboratory Equipment
Preliminary Design Report
Senior Design Team 02021
Team Mentor: Dr. J. S. Török
Team Manager: Andrew Dick
Team Members: Joseph Houtz
Jeremy Redlecki
Ashley Rice
James Streeter
© Senior Design Team 02021
Page 1 of 184
Executive Summary
As senior level engineering students and participants of the senior design class at
RIT, our group’s project was to create a set of nonlinear dynamic laboratory equipment
for use in RIT classrooms and laboratories. By implementing the first six product design
facets covered in senior design lecture, our team has decided upon three nonlinear
systems that can demonstrate chaotic behavior necessary for classroom observation and
analysis.
Facet one, the needs assessment, defines the design objective, constraints, and
performance and financial parameters. Concept development, the second facet, branches
off from brainstorming exercises to researching existing solutions, developing a
consensus of the preliminary design, then creating drawings, descriptions, and a
preliminary bill of materials for the concept. A feasibility assessment, design facet three,
is used to rate the technical, economical, marketable, schedule and performance aspects
of each concept. The scores of the candidate device ideas are then compared on a radar
graph. The top three device ideas were selected at this point.
Design facet four, the design objectives and performance specifications, breaks
down the overall project objective into many yes/no questions, creating an evaluation
checklist for the final design review. From the checklist, performance specifications are
derived. A performance specification table lists the project’s parameters and constraints,
along with the accompanying tolerance values. Safety standards are researched and
implemented during this phase of the design. In facet five, analyses and syntheses were
done for the mechanical and electrical components. Engineering analysis provides
information such the stress in a beam as a function of the size of the beam. Additional
© Senior Design Team 02021
Page 2 of 184
engineering concerns are met through analysis using design structure matrices. Multiple
analyses were done to prove the validity of a system before the materials are bought for
manufacture. Syntheses of the results acquired though engineering analyses were used to
revise the current concepts, causing them to continuously evolve. Once the first five
design facets are completed, facet six, the preliminary design, was used to combines all
knowledge gathered into conceptual CAD models. As the required components were
determined, component suppliers are sought out and included within the device’s bill of
materials list.
All aspects of the design process were considered and implemented into the
current preliminary design concepts for laboratory equipment. The proposed devices
include a setup for Chua’s circuit, a Multi-well Oscillator, and a Chaotic Waterwheel.
Chua’s circuit was simulated and analyzed with the use of electrical engineering software
as well as Kirchoff’s Current Law. The team conducted analyses such as: beam
frequency, stress/deflection, fatigue-failure, and a magnetic field analysis for the
oscillator. The waterwheel’s rotational inertia, stress, and flow were examined through
various analyses. Matlab software provided further simulation and analysis of the chaotic
behavior for all three systems. The team investigated the product specifications for the
sensors, motors, electromagnets, and other specialized hardware used within each device.
The final aspect of the preliminary design report encompasses the budget analysis
and the schedule outlining the completion of the project during the spring quarter. Using
the bill of materials, the total cost of all three devices is determined, and then compared
with the given budget. The spring quarter’s schedule will also follow facets seven
through twelve of the design process.
© Senior Design Team 02021
Page 3 of 184
Acknowledgements
We would like to thank all of the faculty, professors, and students within the college of
engineering that assisted us with any part of this design project. We would especially
like to thank Dr. Török for his wisdom, guidance, and enlightened perspective on the
design process. We would also like to thank Dave Hathaway for the assistance that he
provided our team this quarter.
© Senior Design Team 02021
Page 4 of 184
Table of Contents
Title Page ............................................................................................................................ 1
Executive Summary ............................................................................................................ 2
Acknowledgements ............................................................................................................. 4
Table of Contents ................................................................................................................ 5
Table of Figures .................................................................................................................. 8
1
Facet 1: Recognize and Quantify the Need........................................................ 10
1.1
Project Mission Statement ................................................................................. 10
1.2
Product Description ........................................................................................... 10
1.3
Scope Limitations .............................................................................................. 10
1.4
Stakeholders ....................................................................................................... 11
1.5
Key Business Goals ........................................................................................... 11
1.6
Top Level Critical Financial Parameters ........................................................... 12
1.7
Financial Analysis .............................................................................................. 12
1.8
Primary Market .................................................................................................. 13
1.9
Secondary Markets............................................................................................. 13
1.10 Critical Performance Parameters (Order Qualifiers, Minimum Required
Performance) ...................................................................................................... 14
1.11 Critical Performance Parameters (Order Winners, Desired Performance) ........ 15
1.12 Innovation Opportunities ................................................................................... 16
1.13 Background Research ........................................................................................ 17
1.13.1
Describe the Need ..................................................................................... 17
1.13.2
Categorize the Need .................................................................................. 17
1.13.3
Constraints ................................................................................................ 18
1.13.4
Assess Existing Solutions ......................................................................... 18
1.14 Formal Statement of Work: ............................................................................... 19
2
Facet 2: Concept Development .......................................................................... 22
2.1
Introduction ........................................................................................................ 22
2.2
Preliminary Questions ........................................................................................ 22
2.3
Brainstorming .................................................................................................... 23
2.4
Consensus Building ........................................................................................... 25
2.5
Team Drawing ................................................................................................... 26
2.6
Chosen Concepts ................................................................................................ 26
3
Facet 3: Feasibility Assessment ......................................................................... 29
3.1
Introduction ........................................................................................................ 29
3.2
Technical Assessment ........................................................................................ 30
3.2.1
Technical Question 1: ............................................................................... 30
3.2.2
Technical Question 2: ............................................................................... 31
3.3
Economic Assessment ....................................................................................... 32
3.3.1
Economic Question 1: ............................................................................... 32
3.3.2
Economic Question 2: ............................................................................... 32
3.4
Market Assessment ............................................................................................ 33
3.4.1
Market Question 1: ................................................................................... 33
3.4.2
Market Question 2: ................................................................................... 34
© Senior Design Team 02021
Page 5 of 184
3.5
Schedule Assessment ......................................................................................... 35
3.5.1
Schedule Question 1: ................................................................................ 35
3.5.2
Schedule Question 2: ................................................................................ 36
3.6
Performance Assessment ................................................................................... 37
3.6.1
Performance Questions 1: ......................................................................... 37
3.6.2
Performance Questions 2: ......................................................................... 38
3.6.3
Performance Question 3:........................................................................... 39
3.6.4
Performance Question 4:........................................................................... 39
3.7
Chua’s Circuit .................................................................................................... 40
3.8
Modular Pendulum............................................................................................. 45
3.9
Chaotic Waterwheel ........................................................................................... 49
3.10 Multi-well Oscillator .......................................................................................... 53
3.11 Radar Graph & Discussion ................................................................................ 57
3.12 Conclusion ......................................................................................................... 58
4
Facet 4: Design Objectives and Performance Specifications ............................ 59
4.1
Introduction ........................................................................................................ 59
4.2
Safety Codes and Standards ............................................................................... 59
4.3
Design Objectives .............................................................................................. 61
4.4
Performance Specifications ............................................................................... 63
4.5
Design Procedures ............................................................................................. 64
5
Facet 5: Analysis and Synthesis ......................................................................... 66
5.1
Design Structure Matrix Analysis ...................................................................... 66
5.1.1
Introduction: .............................................................................................. 66
5.1.2
Chua’s Circuit: .......................................................................................... 66
5.1.3
Multi-well Oscillator:................................................................................ 67
5.1.4
Chaotic Waterwheel: ................................................................................. 69
5.2
Chua’s Circuit: Theory and Simulation ............................................................. 71
5.2.1
Theory ....................................................................................................... 71
5.2.2
Simulation ................................................................................................. 74
5.3
Multi-well Oscillator: Theory and Simulation ................................................... 82
5.3.1
Theory ....................................................................................................... 82
5.3.2
Simulation ................................................................................................. 86
5.4
Multi-well Oscillator: Stress/Deflection Analysis ............................................. 93
5.5
Multi-well Oscillator: Beam Frequency Analysis ............................................. 97
5.6
Multi-well Oscillator: Fatigue-Failure Analysis ................................................ 99
5.7
Multi-well Oscillator: Magnetic Field Analysis .............................................. 102
5.8
Chaotic Waterwheel: Theory and Simulation ................................................. 104
5.8.1
Theory ..................................................................................................... 104
5.8.2
Simulation ............................................................................................... 108
5.9
Chaotic Waterwheel: Rotational Inertia Analysis ............................................ 116
5.10 Chaotic Waterwheel: Stress Analysis .............................................................. 119
5.11 Chaotic Waterwheel: Flow Analysis ............................................................... 124
6
Facet 6: Preliminary Design............................................................................. 126
6.1
Chua’s Circuit .................................................................................................. 126
6.2
Multi-well Oscillator ........................................................................................ 127
6.2.1
Strain Gage Selection .............................................................................. 131
© Senior Design Team 02021
Page 6 of 184
6.3
Chaotic Waterwheel ......................................................................................... 135
6.3.1
Angular Velocity Sensor Selection ......................................................... 137
7
Conclusion ....................................................................................................... 140
7.1
Budget .............................................................................................................. 143
7.2
Plan .................................................................................................................. 145
7.3
Schedule ........................................................................................................... 149
Resources ........................................................................................................................ 152
Appendix A – Strain Gage Information .......................................................................... 154
Appendix B – Encoder Bearing Information .................................................................. 156
Appendix C – Chua’s Circuit Supplementary Information ............................................ 162
Appendix D – Multi-well Oscillator Stress/Deflection Analysis Spread Sheets ............ 163
Appendix E – Multi-well Oscillator Frequency Analysis Spread Sheets ....................... 164
Appendix F – Multi-well Oscillator Fatigue-Failure Analysis Spread Sheet ................. 166
Appendix G – Chaotic Waterwheel Equation Derivations ............................................. 168
Appendix H – Chaotic Waterwheel Stress Analysis Spread Sheets ............................... 173
Appendix I – Chaotic Waterwheel Inertia Analysis Spread Sheets ................................ 176
Appendix J – Chaotic Waterwheel Flow Analysis Spread Sheet ................................... 178
Appendix K – Matlab Files ............................................................................................. 180
© Senior Design Team 02021
Page 7 of 184
Table of Figures
Figure 1: Newton's Cradle ................................................................................................ 16
Figure 2: Radar Graph of Feasibility Assessment ............................................................ 57
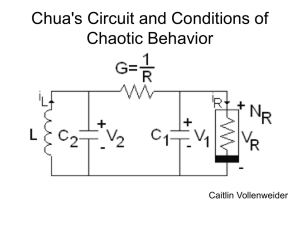
Figure 3: Chua’s Circuit Schematic .................................................................................. 71
Figure 4: Chua’s Diode Schematic ................................................................................... 72
Figure 5: Nonlinear I-V Characteristics ............................................................................ 73
Figure 6: 2-D plot of Chua’s Circuit Output with R = 1.2 kΩ.......................................... 75
Figure 7: 2-D plot of Chua’s Circuit Output with R = 1.23 kΩ........................................ 76
Figure 8: 2-D plot of Chua’s Circuit Output with R = 1.77 kΩ........................................ 77
Figure 9: 2-D plot of Chua’s Circuit Output with R = 1.6 kΩ.......................................... 78
Figure 10: 3-D Plot of Chua’s Circuit Output with R = 1.60 kΩ ..................................... 79
Figure 11: Nonlinear resistance profile with resistance parameter R = 1.60 kΩ .............. 80
Figure 12: Frequency Analysis of Chua’s Circuit for R = 1.60 kΩ .................................. 81
Figure 13: Diagram of a Double-well Oscillator Concept ................................................ 82
Figure 14: Double-well Analog Profile ............................................................................ 84
Figure 15: Triple-well Analog Profile .............................................................................. 84
Figure 16: Simulink model of Double-well Oscillator Equation ...................................... 86
Figure 17: Simulation of beam displacement demonstrating periodic behavior .............. 87
Figure 18: Simulation of beam displacement displaying transient chaos ......................... 88
Figure 19: Simulation of beam displacement displaying chaotic behavior ...................... 88
Figure 20: Simulation of beam velocity displaying chaotic behavior .............................. 89
Figure 21: 2-D projection created from simulation displacement and velocity................ 89
Figure 22: Simulated strange attractor of double-well oscillator...................................... 90
Figure 23: Poincaré Map created from Double-well Oscillator Simulation ..................... 90
Figure 24: Reconstructed attractor projection from simulated displacement ................... 91
Figure 25: Poincaré Map from reconstructed attractor projection .................................... 91
Figure 26: Simulated displacement for a high forcing magnitude .................................... 92
Figure 27: Power spectral density of simulated chaotic signal ......................................... 92
Figure 28: Diagram of Offset Mass .................................................................................. 93
Figure 29: Diagram of Cantilever Beam with Intermediate Load .................................... 94
Figure 30: End Deflection as a Function of Motor Position ............................................. 95
Figure 31: Simulink Model of Chaotic Waterwheel Equations ...................................... 108
Figure 32: Simulated Angular Velocity of the Chaotic Waterwheel .............................. 110
Figure 33: Time series for ‘a1’ ....................................................................................... 111
Figure 34: Time series for ‘b1’ ....................................................................................... 111
Figure 35: 3-D Plot of the Simulated Chaotic Waterwheel System ............................... 111
Figure 36: Simulation of Angular Velocity for Rayleigh number of one ....................... 112
Figure 37: Simulation of Chaotic Waterwheel with Rayleigh number of two ............... 112
Figure 38: Simulation of Angular Velocity with Rayleigh number of ten ..................... 113
Figure 39: Simulation of Angular Velocity with Rayleigh number of fifteen ................ 114
Figure 40: Simulation with Rayleigh number of twenty-five ......................................... 114
Figure 41: Simulation with Rayleigh number of thirty-five ........................................... 114
Figure 42: Reconstructed attractor from simulated angular velocity.............................. 115
Figure 43: Plot of angular velocity versus ‘a1’ value for simulated data ....................... 115
© Senior Design Team 02021
Page 8 of 184
Figure 44: Diagram of Waterwheel for Moment Equation ............................................. 117
Figure 45: Diagram of Bolt Passing Through Wheel ..................................................... 120
Figure 46: Diagram Showing Moment Arm for Cup Assembly..................................... 121
Figure 47: Diagram of Wheel Setup ............................................................................... 122
Figure 48: CAD model of Chua's Circuit Apparatus ...................................................... 126
Figure 49: CAD model of Multi-well Oscillator Apparatus ........................................... 127
Figure 50: Strain Gage Selection Diagram ..................................................................... 132
Figure 51: Pro Engineer Model of Chaotic Waterwheel ................................................ 135
Figure 52: Gantt chart of Schedule for Spring Quarter................................................... 151
Figure 53: Chua's Circuit, Version A.............................................................................. 162
Figure 54: Chua's Circuit, Version B .............................................................................. 162
Figure 55: Submerssible Pump Information Sheet from Vendor ................................... 179
© Senior Design Team 02021
Page 9 of 184
1
Facet 1: Recognize and Quantify the Need
1.1 Project Mission Statement
The mission of this project is to design, build, and test a set of nonlinear dynamics
laboratory equipments that will be used for laboratory experiments, classroom
demonstrations, and graduate level research. A set of laboratory experiments and handson demonstrations shall also be developed to accompany the equipment.
1.2 Product Description
The nonlinear dynamics laboratory equipment shall be designed such that the
characteristics of nonlinear behavior can be both observed visually and in acquired data.
The design shall include the necessary sensors and a computer interface to record the
mechanical behavior of each system. By adjusting the different properties of a given
system, it shall be possible to witness various types of nonlinear behavior. After
extensive testing of the system, these critical parameters shall be determined and utilized
in the creation of a series of laboratory experiments and classroom demonstrations.
1.3 Scope Limitations
The laboratory equipment shall be designed, manufactured, and extensively tested
within the two quarters of time allotted to the project. The budget of the project shall not
exceed the funding set forth by the college. Each apparatus shall be large enough to
provide observable nonlinear behavior, while remaining small enough to be easily
© Senior Design Team 02021
Page 10 of 184
transported, maintained, and operated. The equipment shall be able to accommodate a
group of up to six students working on a laboratory experiment, while still being
manageable by one individual presenting a demonstration in a classroom setting. The
equipment shall also be designed to follow a set of predetermined guidelines, so that the
team members will not require any significant background in the field of nonlinear
dynamics.
1.4 Stakeholders
The stakeholder will be the student design team working on this design project,
the faculty advisor, and the client of the project.
1.5 Key Business Goals
1.
Apply theory learned in class to actual physical systems.
2.
Provide visual mechanical examples of nonlinear behavior for use in
classroom demonstrations and laboratory experiments.
3.
Provide data acquisition and subsequent analysis capabilities for these
nonlinear systems to augment and reinforce the students’ knowledge in the
area of nonlinear dynamics.
4.
Design and construct durable, elegant, and professional looking equipment.
© Senior Design Team 02021
Page 11 of 184
1.6 Top Level Critical Financial Parameters
The following parameters describe the critical financial parameters related to the
nonlinear dynamics laboratory equipment.
The project shall have a budget of $2,000
The equipment shall be designed to require standard 110V 60Hz electricity,
and not any higher voltage or more costly amounts of electricity.
The components of the project shall be designed to last for a minimum of ten
(10) years before they will need to be replaced.
The equipment shall be designed so that it does not require any expensive
material to be replenished for standard operation of the equipment. For
example, water will be used as the fluid for the chaotic waterwheel instead of
a dielectric, non-conductive fluid.
To reduce material costs, the design shall include material that the Mechanical
Engineering Department already possesses and explicitly states that the design
team can use.
1.7 Financial Analysis
The following parameters describe the primary issues related to the laboratory equipment.
The project shall have a budget of $2,000 set forth by the Mechanical
Engineering Department
The cost of components likely to be the largest item on the budget are:
o Data acquisition devices
© Senior Design Team 02021
Page 12 of 184
o Electrical Pump
o Data interface equipment and acquisition/analysis software
o Additional devices required to accompany equipment (web cam)
Any fabrication not done by the students will also incur substantial costs
Computer stations and software that the Mechanical Engineering Department
already owns will be used to reduce cost.
1.8 Primary Market
The primary market for the nonlinear dynamics laboratory equipment is the
faculty and class of students studying nonlinear dynamics and vibrations in the
Department of Mechanical Engineering at the Rochester Institute of Technology. More
specifically the primary market will include (1) upperclassmen undergraduate students
(2) graduate students, and (3) professors, teachers’ assistants, and laboratory assistants.
Depending on how the equipment corresponds to the material being covered in the
engineering courses, it is possible for the equipment to be used by several courses every
quarter of the year. The equipment will also be available for demonstration purposes and
tours.
1.9 Secondary Markets
The secondary markets include other students within the Kate Gleason College of
Engineering and departments outside of the engineering building interested in nonlinear
dynamics. Furthermore, similar departments at other universities can also be considered
© Senior Design Team 02021
Page 13 of 184
potential secondary markets. In addition, a simplified version of the waterwheel may be
desirable to others commercially as a novelty item.
1.10 Critical Performance Parameters (Order Qualifiers, Minimum
Required Performance)
The nonlinear dynamics laboratory equipment will be durable, easily assembled,
disassembled, and maintained. All equipment shall have standardized interfaces with the
necessary data acquisition devices and analysis tools. The equipment size shall be
optimized to provide a balance between being easily-observable and easily-transportable.
The equipment will provide access to experimental data for comparison with data from
analytical and numerical models. The equipment shall be less hazardous than any
previously existing equipment and shall follow all appropriate safety standards. The
equipment shall be designed for use in conjunction with the Mechanical Engineering
Department’s Mobile LabView Station.
The equipment shall be accompanied by a complete user’s manual. The manual
will contain part and assembly drawings, including wiring schematics. Detailed
instructions for assembly, disassembly, and operation of the equipment shall also be
compiled in the user’s manual. The user’s manual shall also include a complete bill of
materials required for the construction of the laboratory equipment.
© Senior Design Team 02021
Page 14 of 184
1.11 Critical Performance Parameters (Order Winners, Desired
Performance)
The nonlinear dynamics laboratory equipment shall be designed to demonstrate a
wide variety of nonlinear behavior. The hardware will be equipped with data acquisition
devices so that the nonlinear behavior of the system can be recorded and analyzed. The
data acquisition shall be precise enough that all the desired nonlinear behavior will be
visible in the collected data. The equipment shall be designed such that the system
parameters will be easily adjustable and recorded.
The user’s manual shall include a series of laboratory experiments to complement
material covered in lecture. The documentation shall include a detailed procedure with
all required interactions with the equipment, data acquisition systems, computer software,
and post-experiment analysis. The experiments shall include all critical parameter values
necessary to observe the desirable nonlinear behavior. A copy of the logbook used
during the testing stage of the project will also be included in the documentation,
validating the critical parameters that are used in the lab experiments. The lab
experiments shall be designed to range from simple to more complicated systems.
In the event that the design team finds itself with the availability of additional
time and funding, the design should include modular equipment to further expand the
amount of exploration that can be accomplished using the equipment. The design team
should also design the equipment to include computer-controlled parameters, noise
reduction/preprocessing circuitry, and ultra-high precision sensors. The design team
should also fabricate spare parts for the equipment to ensure a long and useful life.
© Senior Design Team 02021
Page 15 of 184
1.12 Innovation Opportunities
The waterwheel is an interesting example. If it can be designed and built with
little cost, and the equipment is elegant and professional looking, there exists the
possibility of it being commercialized as a novelty item. On a smaller scale than the
laboratory equipment, these novelty chaotic waterwheels could even gain the same
popularity as Newton’s Cradle. A version of Newton’s Cradle can be seen in Figure 1.
Figure 1: Newton's Cradle
© Senior Design Team 02021
Page 16 of 184
1.13 Background Research
1.13.1
Describe the Need
The laboratory equipment will be used in classroom demonstrations in order to
display nonlinear behavior. The demonstrations will help students understand concepts
in nonlinear dynamics by allowing them to visualize the theoretical concepts. The
equipment will be used with the aid of a miniature web camera and data acquisition
devices to optimize its ability to help with the learning process. The nonlinear dynamics
laboratory equipment will also be used for hands-on laboratory experiments where
students will be able to explore various concepts inherent to nonlinear systems. Separate
laboratory experiments will be developed for students at both basic and more advanced
levels of understanding.
1.13.2
Categorize the Need
Category 6. No Problem, New Technology
The lab equipment used in the Mechanical Engineering Department is standard
and is generally designed to measure and analyze linear behavior. The equipment is
capable of performing its required function and has no need for any modification. It is
necessary to have equipment that will exhibit nonlinear behavior to adequately study
nonlinear systems. This means that new equipment will need to be designed, constructed,
and tested. With the nonlinear dynamics laboratory equipment accompanying the
preexisting linear laboratory equipment, it will be possible to provide a much broader
education to students studying mechanical engineering.
© Senior Design Team 02021
Page 17 of 184
1.13.3
Constraints
The project will have a limited budget and the actual size is limited. The physical
tolerances are limited in order to achieve the desired nonlinear behavior. And of course
the software is limited to what currently is available.
1.13.4
Assess Existing Solutions
The design of this project shall be based on previously existing models that have
been developed in other colleges and universities. By maintaining the basic design of the
systems to preserve the nonlinear behavior, the design team will envision its own
interpretation of the systems. The team will make use of modern sensing devices to
provide for detailed analysis of the nonlinear behavior. We will also include in our
design additional durability and flexibility of the system components.
© Senior Design Team 02021
Page 18 of 184
1.14 Formal Statement of Work:
The team shall be responsible for the following deliverables:
Upon completion of the winter quarter, the design team will be responsible for the
following items:
The design team shall create a complete set of drawings for each piece of
laboratory equipment. This will include all modifications to purchased parts, all
parts to be fabricated, as well as assembly and subassembly drawings. There
shall be assembly drawings to be used for the maintenance of the equipment and
storage of the equipment.
The design team shall create a draft of the technical design package. The
technical design package will include a complete bill of materials for all the
purchased parts, materials, and processing required. The bill of materials shall
contain all the quotes from venders, suppliers, and any companies to be hired
for fabrication work. There shall also be a list of all part, material, and quote
prices. The quantity of parts and materials, number of fabrication processes,
and details for each item shall also be included.
The design team shall create a set of detailed instructions explaining how each
sub-assembly is to be constructed and easy-to-follow directions for each piece
of equipment for use, storage, transportation, and repair if necessary.
© Senior Design Team 02021
Page 19 of 184
The design team shall also participate in a preliminary design review of the
project.
Upon completion of the spring quarter, the design team will be responsible for the
following items:
The design team shall be responsible for a complete set of functional nonlinear
dynamics laboratory equipments. The design team shall keep a detailed
logbook of all experimentation done with the equipment and the associated
critical system parameters. The logbook shall include all data collected, test
conditions, and a detailed description of the procedures used.
The design team shall complete a final version of the technical design package,
including an improved version of the draft as well as a set of laboratory
experiments to accompany each piece of nonlinear dynamics laboratory
equipment. The laboratory experiment will contain detailed procedures
including but not be limited to all interactions with the equipment, any software
used, and any formulas required for data analysis. Separate laboratory
experiments shall be designed to investigate basic and more advanced nonlinear
dynamics. Classroom demonstrations shall also be designed such that a
professor or teaching assistant can demonstrate nonlinear behavior to a class of
engineering students.
© Senior Design Team 02021
Page 20 of 184
The design team shall also participate in a critical design review of the project
and be responsible for a poster and completed web page describing the project.
The team should complete the addition items listed among the order winners
section of the Needs Assessment if the required time and funding is available.
© Senior Design Team 02021
Page 21 of 184
2 Facet 2: Concept Development
2.1 Introduction
The purpose of concept development facet is to use a formal method of
brainstorming to come up with a variety of ideas before approaching a design problem.
The brainstorming is initiated by formulating questions that are determined by the design
goals. Once the questions have been stated, each member of the team contributes
possible solutions to the design questions. The next step in the process is to compile a list
of solutions to the problem. The list is then examined by the team members and a survey
is taken determine which ideas should be considered as possible solutions. Once these
ideas are selected, drawings are made and detailed descriptions are written. At the
conclusion of the exercise the team had created a list of the devices that would be
explored and a general idea of how each device functions.
2.2 Preliminary Questions
The goal of the brainstorming session is to create a list of as many different ideas
for the devices that we will be designing and furnishing with data acquisition equipment.
The devices will display nonlinear and chaotic behavior, and will be used by students of
the Kate Gleason College of Engineering. The equipment must be easily instrumented to
be compatible with one of the LabView stations owned by the Department of Mechanical
Engineering. The apparatuses will need to be durable, elegant, and reliable so that they
can be used at the college of engineering for many years.
© Senior Design Team 02021
Page 22 of 184
The laboratory equipment must be designed such that it is large enough to be able
to show the necessary dynamics when it is being used for classroom demonstrations and
at the same time be small enough that it can be easily transported. It should also provide
a safe environment for the professors and students using it. The equipment should be
simple enough that it can be designed, built, and tested on our limited budget but still
complex enough to be able to demonstrate all the desired dynamics.
The equipment will be included in the college’s set of three tier experiments. The
first tier will be that professors or laboratory assistants will be able to demonstrate a
concept to the students using the equipment. As part of the second tier, the students will
be directly involved in experiments using the equipment. They will follow the laboratory
procedure to setup the equipment, make adjustments, and take readings as they apply the
theory that was covered in lecture. At the level of the third tier, the students will be
involved in more design-oriented experiments. Using their knowledge of nonlinear
dynamics, they will be involved in designing their own portion of the experiment to be
used in conjunction with the laboratory equipment.
2.3 Brainstorming
After each team member searched for various device ideas, a list was created to
show all that had been found. The main source of research was the Internet. The web
pages that were used in this search were recorded by each team member and can be found
in following the conclusion of this report. Research was also done using various books
on nonlinear dynamics. The list included all ideas presented by each of the team
members including ideas that may prove to be outside our financial limitations.
© Senior Design Team 02021
Page 23 of 184
Table 1: Brainstorming Ideas
Chaos in bubbles
Wave ripples
Damped, driven pendulum
Chua’s circuit
Chaotic waterwheel
Belousov-Zhabotinsky reaction
Double-well ball
Synchronization of Fireflies
Water dripping from a facet
Pendulum in a magnetic field
Double pendulum
Double-well oscillator
Chaos in a bouncing ball
Concentric rotating cylinders
Van der Pol circuit
From this list, each team member was able to indicate which of the presented ideas
they felt would best accomplish the task at hand. As we had fifteen different concepts,
each team member distributed three votes among the list as they saw fit. The voting
process yielded Chua’s circuit, an oscillator, a pendulum, and the chaotic waterwheel.
These four concepts were further developed to examine their plausibility for the project
goals.
© Senior Design Team 02021
Page 24 of 184
2.4 Consensus Building
Table 2: Consensus Building Results
Total Votes
Team Member 5
Team Member 4
Team Member 3
Team Member 2
© Senior Design Team 02021
Team Member 1
Brainstormed Ideas
Bubbles
Dripping Water
Wave ripples
Pendulum / Magnets
Chua’s Circuit
Double-well oscillator
Chaotic Waterwheel
Chaos / Bouncing Ball
Damped, Driven Pendulum
Belousov-Zhabotinsky Rxn
Concentric Rotating Cylinders
Double Pendulum
Double-well ball
Van der Pol circuit
Modular Pendulum
Fireflies
0
0
0
1
1
1
1
1
2
1
1
1
1
5
1
2
1
1
1
0
1
1
1
1
1
1
0
0
1
1
0
Page 25 of 184
2.5 Team Drawing
To draw each concept, the team members each started with a piece of paper.
Every person was given a concept to start drawing. After two minutes, the team
members passed their drawings to the member sitting to their left. This was done
multiple times to allow each team member to contribute to each drawing. When the
drawings were complete, they displayed a good representation of how the team envisions
the concepts. From the drawings, written descriptions of the concepts were made.
2.6 Chosen Concepts
Chua’s Circuit
Chua’s circuit was designed to provide an electrical model of the Lorenz
Equations. The Lorenz equations are a system of three nonlinear equations developed my
Edward Lorenz in 1963 to model the nonlinear behavior of atmospheric convection.
Using an arrangement of resistors, capacitors, inductors, diodes, and an operational
amplifier, the Chua’s circuit provides an easily recorded system that is governed by the
Lorenz equations. Our design will connect the Chua’s Circuit to one of the Mechanical
Engineering Department LabView Stations as well as a set of small speakers so that the
nonlinear behavior can be heard, observed, and recorded. This allows the device to be
used for demonstration purposes as well as data analysis. The use of a filter may be
added to remove any significant amount of noise that distorts the signal.
© Senior Design Team 02021
Page 26 of 184
Modular Pendulum
The pendulum, being one of the most basic nonlinear systems, provides a wide
assortment of possibilities. With the ability to vary the damping occurring in the system,
control the torque being applied to the system, and even modify the length and mass of
the pendulum, it is possible to demonstrate many different types of behavior. The
pendulum will be mounted on a fixture that will allow its behavior to be observed
visually and recorded. By utilizing a rotational spring, rotational dampening, and the
ability to apply torque to the system, it will be possible to represent the dynamics of
various systems of equations. By recording the system’s behavior, it will be possible to
study the characteristics of the system.
Multiple-well Oscillator
In this system, a thin piece of metal hanging from a horizontal beam is caused to
oscillate over an array of magnets by a small electric motor. An unbalanced mass on the
electric motor will produce a force to be applied perpendicular to the horizontal beam on
which the motor is mounted. This results in a horizontal oscillation of the beam and a
significant amount of oscillation in the thin piece of metal that is suspended from the free
end of the beam. While the metal is attracted to the magnets, it oscillate further and
further about the center magnets as the magnitude of the sinusoidal force applied to the
system increases. When enough force is applied, the thin piece of metal will have
enough energy to move from a position above one magnet to another magnet and back
erratically. By mounting a set of strain gages onto the thin piece of metal, it will be very
easy to record the nonlinear behavior so that an analysis may be performed.
© Senior Design Team 02021
Page 27 of 184
Chaotic Waterwheel
The chaotic waterwheel was designed to provide a physical model of the Lorenz
Equations. The Lorenz equations are a system of three nonlinear equations proposed by
Edward Lorenz in 1963 to model the nonlinear behavior of atmospheric convection. The
system will be composed of a wheel on which an array of cups will be spaced equally
around the perimeter. Water will flow into the cups from a position directly over the
center of the wheel. The addition of dampening to the system via a rotational braking
unit will cause the system to be significantly dissipative. When the flow rate of the water
is varied, the rotation of the system will display a variety of nonlinear behavior including
chaotic behavior. Using data acquisition equipment to record the angular velocity of the
wheel will enable a quantitative analysis of the nonlinear behavior of the system. The
single time series of data gathered from the wheel can then be used to reconstruct the
system’s attractor. The attractor defined by the systems dynamics can be use this to
determine the characteristics of the dynamic system.
© Senior Design Team 02021
Page 28 of 184
3 Facet 3: Feasibility Assessment
3.1 Introduction
The feasibility of a product can be measured by way of rating the many design
factors associated with the construction of a product. The performance, economical and
technical aspects, as well as the schedule and marketability of a product come into
consideration when deciding upon a final design. By proposing key questions for each of
the five feasibility factors, then determining the numerical rating system for all potential
device ideas, the feasibility comparison between the devices are made more scientifically
evident. Our team rated four candidate concepts separately on a scale of zero to three for
each of the twelve questions inspired by the five feasibility factors. When all numerical
values were determined for each device, the results were plotted using a radar graph.
© Senior Design Team 02021
Page 29 of 184
3.2 Technical Assessment
3.2.1 Technical Question 1:
The first technical question deals with how knowledgeable the design team is in
the area of material required for the device. For all proposed devices, the team has a
basic competence in all technical areas needed to create/manufacture a successful design.
Our team is comprised of four mechanical engineers and one electrical engineer—thus
the device will lean more heavily towards mechanical device ideas. In turn, the group as
a whole will better utilize each member’s specialized knowledge and ability. The team’s
electrical engineer will need to answer the majority of the electrical questions without
help from the rest of the team. However, because the product development workload will
cater towards a mechanical engineer’s knowledge, all members of the group will donate
an equivalent amount of time to the device’s development and construction. Based on
potential situations that may challenge the team, the scoring system was established as
follows:
0
The team has little or none of the required skills to complete the device
and would not be able to learn the required skills.
1
The design team has some knowledge and skill that will be required by the
device but will rely heavily on outside assistance.
2
The design team has a broad range of skills and knowledge that will be
required for the device development and know where to find any
additional information that will be required.
© Senior Design Team 02021
Page 30 of 184
3
The design team is completely knowledgeable in all the areas that will be
required by the device. The team has all the necessary skills and has
completed projects very similar in the past.
From this scale, it is possible to evaluate each of the potential concepts and
compare how well each of them relate with the skills and knowledge of the team.
3.2.2 Technical Question 2:
This question concerns the availability of the technology that will be required by
the device. In general, all four of the candidate devices require technology that exists
today. Thus, the device chosen will not be difficult to handle technically. The materials
for all devices can also be found easily via the Internet or other resources. Some devices
may use materials readily available from the RIT mechanical engineering machine shop.
For these reasons, all devices received a feasibility assessment grade of two out of
three—given that the group will need to research and acquire some materials. After
evaluating possible situations that may occur concerning the technology required by the
device, the following scoring system was established:
0
The device requires technology that does not exist.
1
The device requires technology that has or is being developed and is not
readily accessible through commercial means.
2
The technology required by the device consists of current technology that can
be acquired through some commercial vendor.
3
All the technology required by the device is readily available and can be
purchased a many different neighborhood stores.
© Senior Design Team 02021
Page 31 of 184
Using this scale, it is possible to determine the level of technology that was
required by each of the devices.
3.3 Economic Assessment
3.3.1 Economic Question 1:
This question deals with how well the device can be designed and built while not
exceeding the budget set forth by the customer. After considering possible financial
situations, the following scoring system was established:
0
The device requires so much money that is cannot possibly be completed in
the near vicinity of the budget.
1
The device will require some extra funds or else lower quality materials can
be substituted to reduce the cost.
2
The device can be realized using the current funding.
3
The amount of money required for the device is considerably less than that set
forth in the budget. This will allow the team to have extra funding to be used
for beer and food.
Using this scale, it is possible to determine how each of the potential concepts
compare in regards to the cost of the devices.
3.3.2 Economic Question 2:
In this question, we addressed the durability of the devices. It examines the
possibility that further funding may be required to allow the device to continue being
functional and useful to the customer. We examined each of the devices and determined
© Senior Design Team 02021
Page 32 of 184
which components might need to be replaced in time, the approximate life span of the
components, and the cost to fabricate the extra components. We also examined each
device to determine if an expensive fuel or power supply would be required. Based on
these possible situations, the following scoring system was established:
0
The device will constantly fall apart and require expensive repairs. The
device requires a constant input of an expensive fuel or material to allow
continues use.
1
The apparatus cost little to fix, but it is difficult to repair and breaks every
once in a while.
2
The cost to make repairs to the equipment is minimal and maintenance is
rarely required.
3
The equipment is very well designed and requires little to no maintenance.
The customer saves a lot of money using the equipment.
Using this scale, it is possible to determine how durable each of the devices is and
how expensive it will be to maintain each apparatus.
3.4 Market Assessment
3.4.1 Market Question 1:
The first market question concerns how well the cost compares with the quality
and usefulness of the equipment. It would be ideal to be able to develop the equipment
such that it is very useful to the customer and can be produced relatively inexpensively.
© Senior Design Team 02021
Page 33 of 184
Based on the possible costs and equipment quality, the following scoring scheme was
created:
0
The concept proves to be very expensive and there is very little desire for it.
It provides little usefulness to the customer at a high cost.
1
The equipment can be designed to be desirable to the customer and others but
it comes at a high cost.
2
The equipment concept is in great demand by the customer and others and can
be developed at a reasonable cost.
3
At a very low cost, the equipment can be developed and will be demanded
greatly by many customers.
From this scale, we were able to determine how well the market would be able to
bear the price of each of the potential concepts for the equipment.
3.4.2 Market Question 2:
The second market question concerns how the device fits with the current and
future areas of strength of the design team. This question would examine the teams
experience and knowledge required for each of the devices. A scoring system was then
created based on the potential situations that would occur:
0
The device concept is not within the strength of the design team. The material
that will be required for the design has not been covered by our courses.
1
This device concept will require us to expand our skills from the base that we
have. There will be a considerable learning curve before the bulk of the
design work can begin.
© Senior Design Team 02021
Page 34 of 184
2
This device contains material with which we have experience. Any
additional material required for the device can easily be obtained from sources
outside the design team.
3
The design team members are experts in the areas that will be required by this
design. We have done similar projects before and have pre-existing resources
to expedite the process.
From this scale, it is possible to grade each of the potential devices and compare
how well each of them complies with the current and future strengths of the design team.
3.5 Schedule Assessment
3.5.1 Schedule Question 1:
This schedule question is concerned with the development time that will be
required for each of the potential equipment concepts. That includes the time that is
required by the team to conduct the necessary research, to narrow the potential solutions,
and then to design, assemble, and validate the equipment. The time frame for our
development process requires that the design be completed by the tenth week of the
winter quarter. At the end of the spring quarter, the equipment must be assembled and
validated as well as the accompanying documentation for the demonstrations and
experimentation. After considering a few possible situations that may occur, the
following scale was created:
0
It would be impossible to complete the design on time. The time required by
the device is much greater than what is available.
© Senior Design Team 02021
Page 35 of 184
1
The design of the device can be completed on time but only if the design team
spends all their time on the equipment. Because of the rush, the quality of the
equipment is likely to suffer.
2
Within the given time frame, the design team will have no trouble completing
the design of the device. By working a reasonable amount of time of the
device, the team will be able to accomplish all the design objectives and the
equipment will be within tolerance of the performance specifications.
3
Much less time is required to complete the design of the device than that
available, it will be possible for the design team to add a number of features to
the design and run extensive testing to validate the equipment.
From this scale, it is possible to rank each of the prospective devices and compare
how much time will be required to develop each of the designs.
3.5.2 Schedule Question 2:
The second schedule question deals with how long the product will be desirable
by the current market. Nonlinear dynamics is a current field of study with no immediate
end in sight. There is no known reason why any of the devices would not have a large
window of opportunity (unless they didn’t assist in the learning of nonlinear dynamics).
In evaluating feasibility, all devices have been given a score of 3 for this question. This
score corresponds to their large windows of opportunity. In regard to these concerns, the
following scale was used to score each of the potential concepts:
0
The device is needed immediately for class instruction and demonstration but
will not be desirable in the future.
© Senior Design Team 02021
Page 36 of 184
1
The device will be outdated if it does not reach the consumer by the end of
May.
2
The window of opportunity for the device is only a couple years. After this
point, the technology will be outdated and no longer desirable.
3
This device has a window of opportunity that is either very long or does not
have an end in sight.
After each of the potential devices is scored, it is possible to compare each design
and determine the relative window of opportunity for each of the potential devices.
3.6 Performance Assessment
3.6.1 Performance Questions 1:
The first performance question concerns how the device meets the top
requirements of the project set forth by the customer. The top requirements for this
project are that the set of equipment will be durable, have educational value, and allow
for a multi-tier set of experiments. From these top project needs, the scoring system was
established as follows:
0
Little or nothing can be learned from the equipment. It is very fragile and
does not allow for any modification.
1
The equipment promotes learning but is easily damaged and has limited
potential.
2
The equipment is durable and well build. It can be used to promote learning
but does not allow for much modification.
© Senior Design Team 02021
Page 37 of 184
3
The equipment is very well built. It can be used in many different ways and
much can be learned the experiments.
From this scale, it is possible to grade each of the potential devices and compare
how well each of them meet the top needs specified by the customer.
3.6.2 Performance Questions 2:
This question concerns the addition of extra features to the product above and
beyond the level required by the customer. This would include anything that improves
the equipment past the basic level or anything that enhances the use of the equipment
through additional features. Based on the amount of additional features included in the
design of each device, the following scoring system was established:
0
There are no additional features in the design. It only accomplishes the most
basic requirement set forth by the customer.
1
The equipment is designed to be slightly better than required by the customer.
This could include a feature that improves the equipments use in experiments
or demonstrations.
2
The equipment design includes a number of additional features that greatly
improve the performance in the classroom/laboratory setting. This allows for
greater ease in using the equipment, collecting data, and performing the data
analysis.
3
The design of the equipment includes so many additional features that go
beyond the basic design requirements that a number of additional uses for the
equipment exist.
© Senior Design Team 02021
Page 38 of 184
Using this scale, it is possible to determine the level of additional features that are
included in the design of each of the potential concepts.
3.6.3 Performance Question 3:
The third performance question concerns how well the equipment follows all
regulatory requirements that apply to it. This question relates to the safety in the design
of the electrical subsystems, moving parts on the equipment, and any other potentially
harmful portion of the equipments. In regard to these concerns, the following scale was
used to score each of the potential devices:
4
Use of the equipment may cause serious injury or death.
5
Even when used properly, the equipment may cause injury to the user.
6
When the equipment is used properly, there is no risk of injury.
7
The design of the equipment allows for it to be harmless, even when used
improperly.
After each of the potential devices is scored, it is possible to compare each design
and determine how well each device follows the necessary regulatory requirements.
3.6.4 Performance Question 4:
Performance question four dealt with the potential of the equipment to satisfy
needs of additional users beyond the customer. This would include the possibility that
another department, such as Electrical Engineering or Physics, decided that they could
use our equipment to benefit their students. The feasibility of potential utility of our set
of equipment by additional users was scored using the following system:
© Senior Design Team 02021
Page 39 of 184
0
The equipment design is much too specialized and there will not be anyone
else interested in using it.
1
The design is very specific to the customer’s application but there may be
very similar customers that would be interested in an adapted version of the
equipment.
2
The laboratory equipment is designed such that it can be used in a variety of
different fields after the necessary modifications have been made.
3
As the device is, there are many other customers that would be interested in
the equipment. There is quite a bit of work being done in these fields and
there would be a high demand for the equipment set.
This scoring scale allows each of the potential concepts to be analyzed and then
ranked according to how much additional demand may exist beyond the primary
customer.
3.7 Chua’s Circuit
Technical Question 1 - Score 2
Our electrical engineer will be the backbone of this devcie. A mechanical
engineer will assist Joe with research and programming. Chua’s circuit is simple enough
to evaluate and construct in a timely manner. Therefore, to manage this device
development along with two more mechanical devices would be an acceptable use of the
team’s skill resources. Because this is one device out of three and the electrical engineer
© Senior Design Team 02021
Page 40 of 184
Chua’s Circuit (Continued)
has the knowledge to create the circuit, this device rates a 2 out of 3.
Technical Question 2 – Score 2
Chances are, the group may need to purchase only one component of Chua’s
circuit. All other components may be available from the electrical engineering
laboratory. The speakers will need to be purchased, but overall, this device may be the
simplest in technically complexity. Overall, Chua’s circuit is technologically simple and
uses common electrical components. This is evidently the simplest device in regards to
the materials used.
Economic Question 1 – Score 3
The circuit is relatively low cost to build. There aren’t any components that are
really high priced. The bulk of the money will be spent on the PC board and the power
supply needed.
Economic Question 2 – Score 2
This device has low cost components that will probably never need to be replaced.
The circuit can be replaced repaired fairly easily. The other components in the device
can also be replaced inexpensively and without difficulty.
© Senior Design Team 02021
Page 41 of 184
Chua’s Circuit (Continued)
Market Question 1 – Score 3
This device proved to be very useful with a low development cost. By adjusting
some of the parameters, it is possible to explore different types of nonlinear behavior.
The majority of the components are small electrical components that can be acquired
from the electrical department with little cost. There are very few mechanical parts to
this device so it will be relatively inexpensive and easy to assemble. Because it will be
compatible with the LabView stations, it will be very easy to use and provide a great deal
of information.
Market Question 2 – Score 1
There are a few challenges our team must undertake in order to make Chua’s
circuit successful. Currently, no one has knowledge of how to use LabView, which is
necessary for data acquisition. We may need to seek outside assistance for this reason;
however, many professors will be able to help. Also, the circuit needs an inductor that
may be difficult to acquire. Other than those issues, the circuit seems feasible and easy to
construct.
Schedule Question 1 – Score 3
The Chua’s circuit device will be completed in all aspects. We are confident in
our ability to acquire all necessary electrical components in a timely fashion. Also, we
believe that we will have no serious problems in programming LabView.
© Senior Design Team 02021
Page 42 of 184
Chua’s Circuit (Continued)
Schedule Question 2 – Score 3
Because Chua’s Circuit can be used to study a variety of nonlinear dynamics, a
field that has just developed in the past few decades and is continuing to grow, the
window of opportunity for the device does not have an end in sight. While the data
acquisition system may require updating, the system will remain desirable for a long
period of time.
Performance Question 1 – Score 3
Performance question one dealt with how well the laboratory equipment will be
able to comply with the main goals that were set forth by the Department of Mechanical
Engineering. The design for Chua’s Circuit will be educational, durable, and easy to use.
Because of this, it received a score of three for performance question one.
Performance Question 2 – Score 2
The second performance question addressed the potential of additional features in
the development of the laboratory equipment that goes above and beyond that required by
the Mechanical Engineering Department. The Chua’s Circuit design will include a
number of features that will allow for enhanced use and improved operation. A score of
two was given to this device because it includes a moderate amount of “bells and
whistles”.
© Senior Design Team 02021
Page 43 of 184
Chua’s Circuit (Continued)
Performance Question 3 – Score 3
The matter of complying with all necessary regulatory requirements was covered
in performance question number three. This design will only include low voltages and
almost all of the conductors will be covered, eliminating almost all risk of injury. This
device also does not include any moving parts that may present a potential health
concern. Chua’s Circuit received a score of three in this category because it presents
almost no risk of injury.
Performance Question 4 – Score 2
Performance question number four addresses the possibility that there may be
additional users beyond the Department of Mechanical Engineering at R.I.T. The design
for Chua’s Circuit has potential use in electrical engineering, physics, and other fields of
study. The hallmark aspects of nonlinear dynamics that can be examined with this device
also make it desirable to individuals in other institutions. The design for Chua’s Circuit
was given a score of two for this performance question because is has a potential for use
by others but is limited to the equation that governs the circuit
© Senior Design Team 02021
Page 44 of 184
3.8 Modular Pendulum
Technical Question 1 – Score 2
The pendulum device requires research in motion sensors. The complexity of the
pendulum structure is basic for all members of the group (especially the mechanical
engineers). As with all other devices listed previously, the data acquisition program to
study the experimental results will need to be learned. Because of this, the pendulum
device receives a score of two along with the other devices.
Technical Question 2 – Score 2
The pendulum device requires the purchase of a motion sensor. This will need to
be researched possibly at great length in terms of attaining a sensor that will meet our
budget requirements.
However, the technology is known for this device as much as for
the other devices. Overall, the pendulum is technologically and materially feasible.
Economic Question 1 – Score 1
This device will be a bit expensive, in comparison to the other concepts. It is also
likely that the device may not work as expected. To get this device working properly the
budget might have to be expanded slightly. The pendulum will require a rotational
sensor, means to apply a torque to the pendulum, rotational dampening, and a rotational
spring.
© Senior Design Team 02021
Page 45 of 184
Modular Pendulum (Continued)
Economic Question 2 – Score 2
This device would be repaired easily and cheaply. The likelihood of the device
breaking is minimal. The only way major damage would be incurred is through blatant
misuse and abuse.
Market Question 1 – Score 2
The pendulum device appears to provide many different configurations that will
allow the user to explore a vast amount of nonlinear dynamics. Due to the rotational
nature of the pendulum, it will be a slightly more difficult to arrange all the required
components and some research will be required to determine how the torque will be
applied to the system. Because of these factors, the cost of this device will probably be
higher than the other devices. This balance of being extremely desirable and somewhat
expensive earns the Modular Pendulum a rating of a two in this category.
Market Question 2 – Score 1
The modular pendulum also has issues with sensing and data acquisition. The
group may require assistance in choosing the appropriate sensor to employ. Also,
making the pendulum modular means it will be more complex than the oscillator. The
group should be able to fabricate the necessary components relatively easily.
© Senior Design Team 02021
Page 46 of 184
Modular Pendulum (Continued)
Schedule Question 1 – Score 3
We will be able to complete the pendulum device in all aspects. We are confident
in our ability to design a working and reliable pendulum, from which data collection will
be simple.
Schedule Question 2 – Score 3
Because the Modular Pendulum can be used to study a variety of nonlinear
dynamics, a field that has just developed in the past few decades and is continuing to
grow, the window of opportunity for the device does not have an end in sight. While the
data acquisition system may require updating, the system will remain desirable for a long
period of time.
Performance Question 1 – Score 3
Performance question one dealt with how well the laboratory equipment will be
able to comply with the main goals that were set forth by the Department of Mechanical
Engineering. The Modular Pendulum will be designed to be durable, will promote
learning of nonlinear dynamics, and be easily operated. Because of this, it received a
score of three for performance question one.
© Senior Design Team 02021
Page 47 of 184
Modular Pendulum (Continued)
Performance Question 2 – Score 2
The second performance question addressed the potential of additional features in
the design of the laboratory equipment that goes above and beyond that required by the
Mechanical Engineering Department. The Modular Pendulum device will include the
ability to change out different components to allow for numerous arrangements to study
various equations of motion. A score of two was given to this device because it includes
a moderate amount of “bells and whistles”.
Performance Question 3 – Score 2
The matter of complying with all necessary regulatory requirements was covered
in performance question number three. This design will only include low voltages and
will not have any exposed conductors. This device will have moving parts but they will
be small and present few potential health concerns. The Modular Pendulum received a
score of two in this category because it presents very little risk of injury.
Performance Question 4 – Score 3
Performance question number four addresses the possibility that there may be
additional users beyond the Department of Mechanical Engineering at R.I.T. The design
for the Modular Pendulum has potential use in physics and other fields of study. The
phenomena in nonlinear dynamics that can be examined with this device also make it
desirable to individuals in other institutions. The design for the Modular Pendulum was
© Senior Design Team 02021
Page 48 of 184
Modular Pendulum (Continued)
given a score of a three for this performance question because is has a potential for use by
others and can easily be modified to follow different equations of motion.
3.9 Chaotic Waterwheel
Technical Question 1 – Score 2
The waterwheel will involve the use of a flow meter and a rotational velocity
sensor. All engineers on the team can help with the research and implementation of the
two monitoring devices. The four mechanical engineering students can concentrate on the
water pump and all other mechanical aspects of the device. This device entails mostly
mechanical work, but given that 80% of the team is mechanically specialized, and a
potential for one of the three devices to be strictly electrical work, the water wheel is a
solid candidate. All technology used in the water wheel is fundamental engineering
work. The device was granted a score of two because some aid may be needed with
learning a software program.
Technical Question 2 – Score 2
A flow meter, a rotational velocity sensor, pump and brake will need to be
purchased. Structural materials such as the shaft, wheel, and etc. may be acquired from
the RIT machine shop. Overall, the water wheel is technologically and materially
feasible. However, this device is indeed the most complex regarding materials.
© Senior Design Team 02021
Page 49 of 184
Chaotic Waterwheel (Continued)
Economic Question 1 – Score 2
This device can be done, and will most likely work very well. The cost may be a
little heavier than the other devices, but it will still be close to the original budget. Most
of the expense will be on sensors and other electronic equipment.
Economic Question 2 – Score 2
This device could be repaired easily and cheaply. The likelihood of the hardware
breaking is minimal. The only way major damage would be incurred is through blatant
misuse and abuse.
Market Question 1 – Score 2
The design of the Chaotic Waterwheel provides an excellent visual representation
of the Lorenz Equations. The design will allow for adjustable parameters and the
collection of data. The cost for the device will include a few sensors and the material that
will be used. Because this device is larger than the others, there is the potential of it
requiring a proportionally larger amount of the budget. In general, it rates equivalent to
the majority of the other devices in this aspect and received a score of two.
Market Question 2 – Score 1
The Chaotic Waterwheel may require our group so seek assistance for multiple
reasons. We need to figure out an accurate way to measure the flow rate of water
entering the wheel. The rotational sensor may be difficult to select, because it needs to
© Senior Design Team 02021
Page 50 of 184
Chaotic Waterwheel (Continued)
measure clockwise and counterclockwise rotation. In addition, there is the typical issue
of mastering LabView and data acquisition.
Schedule Question 1 – Score 2
The chaotic waterwheel can be built and tested, but due to the size of the device, it
will require proportionately more time than the other options. The number of
components that may need to be fabricated significantly increase the time that this device
will require.
Schedule Question 2 – Score 3
Because the Chaotic Waterwheel can be used to study a variety of phenomena in
nonlinear dynamics, a field that has just developed in the past few decades and is
continuing to grow, the window of opportunity for the device does not have an end in
sight. While the data acquisition system may require updating, the system will remain
desirable for a long period of time.
Performance Question 1 – Score 3
Performance question one dealt with how well the laboratory equipment will be
able to comply with the main goals that were set forth by the Department of Mechanical
Engineering. The Chaotic Waterwheel will have a robust design, its use will be very
straightforward, and will advance learning of nonlinear dynamics. Because of this, it
received a score of three for performance question one.
© Senior Design Team 02021
Page 51 of 184
Chaotic Waterwheel (Continued)
Performance Question 2 – Score 2
The second performance question addressed the potential of additional features in
the design of the laboratory equipment that goes above and beyond that required by the
Mechanical Engineering Department. The Chaotic Waterwheel device will include the
ability to vary the rotational dampening and adjust the flow rate of the water. A score of
two was given to this device because the concept includes a moderate amount of “bells
and whistles”.
Performance Question 3 – Score 2
The matter of complying with all necessary regulatory requirements was covered
in performance question number three. This device will only include low voltages, will
not have any exposed conductors, and special attention will be given to the use of the
submersible pump and associated wiring. This device will have moving parts but they
will be confined to a given area and will only present minimal risk of injury. The Chaotic
Waterwheel received a score of two in this category because it presents very little risk of
injury.
Performance Question 4 – Score 2
Performance question number four addresses the possibility that there may be
additional users beyond the Department of Mechanical Engineering at R.I.T. The
Chaotic Waterwheel has potential use in physics and other fields of study. The
phenomena in nonlinear dynamics that can be examined with this device also make it
© Senior Design Team 02021
Page 52 of 184
Chaotic Waterwheel (Continued)
desirable to individuals in other institutions. The concept for the Chaotic Waterwheel
was given a score of two for this performance question because is has a potential for use
by others, but is restricted to the associated general governing equations of the system.
3.10 Multi-well Oscillator
Technical Question 1 – Score 2
Both mechanical engineers and electrical engineers can research electro-magnets,
strain gages, and small motors.
Mechanical engineers will design the material structure
of the oscillating device. The electrical engineer will research and perform the wiring of
the sensors and other electronic variables to the PC via data acquisition card. Either a
mechanical or electrical engineer can program the input/output data card via LabView
software program. Because all technical aspects of this device can be solved by the
members of our group with some training in LabView programming software, the
oscillator device scores a two out of three feasibility rating.
Technical Question 2 – Score 2
Electro-magnets, strain gages, a data acquisition device, and a small motor will be
searched via the Internet. Potentially, the RIT lab may furnish the strain gage. All
structural materials can be easily purchased or found in the machine shop. Overall the
oscillator is technologically and materially feasible.
© Senior Design Team 02021
Page 53 of 184
Multi-well Oscillator (Continued)
Economic Question 1 – Score 3
This device won’t have a very large budget. The team can manufacture most of
the parts needed. The magnets and sensors will be the most expensive parts in this
device.
Economic Question 2 – Score 2
This device would be repaired easily and cheaply. The likelihood of the device
breaking is minimal. The only way major damage would be incurred is through blatant
misuse and abuse.
Market Question 1 – Score 3
With control over the array of magnets and the ability to adjust the locations of
various components, the oscillator will be a desirable product. As the main sensors are
merely a set of strain gages and the input comes from a small electric motor with an
unbalance, there will not be a large cost with this apparatus.
Market Question 2 – Score 2
The oscillator seemed to fit best with our group’s current and future areas of strength. Its
sensing requirements were met by strain gages, which everyone is familiar with. The
only issue with this device would be using LabView for data acquisition. Otherwise, it
seems to be simple to construct and useful as an instructional aid.
© Senior Design Team 02021
Page 54 of 184
Multi-well Oscillator (Continued)
Schedule Question 1 – Score 3
The oscillator device will be completed in all aspects within the allotted time.
This would mean that we feel confident in our abilities and the availability of needed
materials and equipment.
Schedule Question 2 – Score 3
Because Multi-well Oscillator can be used to study a variety of nonlinear
dynamics, a field that has just developed in the past few decades and is continuing to
grow, the window of opportunity for the device does not have an end in sight. While the
data acquisition system may require updating, the system will remain desirable for a long
period of time.
Performance Question 1 – Score 3
Performance question one dealt with how well the laboratory equipment will be
able to comply with the main goals that were set forth by the Department of Mechanical
Engineering. The Multi-well Oscillator will have a durable designed, will be easy to use,
and will encourage learning of nonlinear dynamics. Because of this, it received a score
of three for performance question one.
Performance Question 2 – Score 2
The second performance question addressed the potential of additional features in
the design of the laboratory equipment that goes above and beyond that required by the
© Senior Design Team 02021
Page 55 of 184
Multi-well Oscillator (Continued)
Mechanical Engineering Department. The Multi-well Oscillator concept will include the
ability to modify the magnet array, vary the magnitude and frequency of the applied
force, and adjust the field strength of the magnets. A score of two was given to this
apparatus because the concept includes a moderate amount of “bells and whistles”.
Performance Question 3 – Score 2
The matter of complying with all necessary regulatory requirements was covered
in performance question number three. This apparatus will only include low voltages and
will not have any exposed conductors. This device will have moving parts but they will
be very small and have a limited amount of travel. The Multi-well Oscillator received a
score of two in this category because it presents very little risk of injury.
Performance Question 4 – Score 3
Performance question number four addresses the possibility that there may be
additional users beyond the Department of Mechanical Engineering at R.I.T. The Multiwell Oscillator has potential use in physics and other fields of study. The phenomena in
nonlinear dynamics that can be examined with this device also make it desirable to
individuals in other institutions. The concept for the Multi-well Oscillator was given a
score of three for this performance question because is has a potential for use by others
and can follow different equations of motion with little modification.
© Senior Design Team 02021
Page 56 of 184
3.11 Radar Graph & Discussion
Feasibility Assessment of Nonlinear Dynamics Laboratory Equipment
Technical 1
3
Performance 4
Technical 2
2
Performance 3
Economic 1
1
Performance 2
0
Economic 2
Performance 1
Market 1
Schedule 2
Market 2
Schedule 1
Chua's Circuit
Modular Pendulum
Multi-well Oscillator
Chaotic Waterwheel
Figure 2: Radar Graph of Feasibility Assessment
Our four device ideas were plotted on the radar chart (Chua’s circuit, modular pendulum,
multi-well oscillator, and chaotic waterwheel). The radar chart exhibits the rating system from
lowest to highest moving outward from the center. Of the four concepts, we were able to narrow
the selection down to three. Therefore, the device with the most low values was determined the
least attractive of the choices. Because the modular pendulum may require a laser sensor, the
pendulum is more costly and less marketable than say the multi-well oscillator. Thus, the
oscillator ranked higher than the pendulum, and in turn, the pendulum was eliminated.
© Senior Design Team 02021
Page 57 of 184
3.12 Conclusion
By addressing feasibility questions, and rating the answers from one to three, we were able
to scientifically examine the feasibility of potential device ideas. Once results were tabulated on
a radar chart, the team could better compare one device with respect to another by way of
examining the minimal numerical values placed on each apparatus. Because the modular
pendulum received two ratings of one, it was removed from the device candidate list. The
feasibility assessment helped us narrow down our device ideas to the three most favorable.
Thus, we have now determined our senior design project and plan to present our ideas to our
client, Dr. Hensel.
© Senior Design Team 02021
Page 58 of 184
4 Facet 4: Design Objectives and Performance
Specifications
4.1 Introduction
Before the actual design process began, the team created a list of project deliverables. By
itemizing the project goals, the team should be able to easily evaluate if the devices fulfill RIT’s
needs for nonlinear dynamics laboratory equipment. In addition, the team examined the three
concepts from a safety standpoint. It was important to determine if any of the devices posed a
potential health hazard. Also, the team generated and compiled a list of performance
specifications for each component utilized in the devices.
4.2 Safety Codes and Standards
To ensure that each of the equipment designs complied with the applicable codes and
standards, each aspect of the designs was examined. From analyzing each of the designs, it was
possible to determine the necessary actions to take to ensure all the equipment would be in
compliance.
The chaotic waterwheel presents the most potential for a safety hazard. As the device has
both electrical components and water, there are a number of steps that must be taken to eliminate
the potential for injury. The electric pump that will be used must hold an IP68 rating, so that it
will be submersible or waterproof. All the electrical components and wiring must be protected
from the water to prevent injury to the user. The structure should be adequately anchored and
designed with a low center of gravity to prevent it from being easily tipped over during operation
© Senior Design Team 02021
Page 59 of 184
or transportation. All of the fabricated components must have sharp edges removed and the
equipment should be designed to comply with the requirements of the LabView Stations.
The design of the Chua’s Circuit apparatus should be such that there are not any exposed
electrical connections. The circuit should include a fuse so that excessive voltage applied to the
system will not damage the equipment. All the wires that are used must be insulated. Heat
resistant material is to be used near heat generating electrical components to prevent a potential
fire hazard. Any components that will produce a significant amount of thermal energy will be
fitted with heat sinks to safely dissipate the energy. The amplitude of the speaker output will
also be controlled to prevent aural damage. All of the fabricated components must have sharp
edges removed and the equipment should be designed to comply with the requirements of the
LabView Stations.
The Multi-well Oscillator device should not include any exposed electrical connections.
All wires that are used must be insulated. To eliminate the possibility of damaging the system
with excessive voltage, a fuse will be used. All of the fabricated components must have sharp
edges removed and the equipment should be designed to comply with the requirements of the
LabView Stations.
© Senior Design Team 02021
Page 60 of 184
4.3 Design Objectives
Can the theory that was learned in class be applied using the equipment?
Does the equipment provide a visual example of equations studied in class and allow it to
be used as a demonstration tool by the department faculty?
Does the equipment allow for all three levels of experimentation?
o Can the equipment be used as a demonstration?
o Can the students use the equipment to complete basic experiments?
o Can the students use the equipment to complete more advanced, design-based
experiments?
Does the equipment interface properly with the LabView stations?
o Does the equipment comply with the voltage requirements?
o Are the correct connectors used on each of the devices so that they interface with
LabView?
Does the experimental procedure follow the required guidelines and format of the
department
Can the experimental procedures be completed successfully within the required time
frame?
Does the equipment use only standard 110V 60Hz AC electricity allowing
demonstrations and experiments to be conducted in many locations?
Does the equipment follow the required safety regulations so that neither the faculty nor
the students are in any unnecessary amount of danger of injury while using the
equipment?
© Senior Design Team 02021
Page 61 of 184
Does the users manual accompanying the equipment provide all the necessary
information to maintain, transport, and use the equipment?
o Does the manual include detailed instructions as to what must be done to set up
the equipment for a demonstration and how to run the equipment during the
demonstration?
o Does the manual include detailed instructions as to how the equipment is to be
maintained and how any of the most active components are to be replaced?
© Senior Design Team 02021
Page 62 of 184
4.4 Performance Specifications
Table 3: Performance Specifications and Tolerances
Performance Specifications Table
Description
Target
Equipment weight
30 lb
Equipment size
2'x2'
Equipment height
2.5'
Stress analysis
nd=3
Fatigue analysis
10 yr
Student feedback
75% positive
Faculty feedback
75% positive
Experiment length
75 minutes
Demonstration length
15 minutes
LabView Components
Part
Description
PCI-6052E
Bus
Analog inputs
Digital I/O
Input range
Resolution
Sampling rate
Counters
SCXI-1305
DC rejection
Input impedance
CSXI-1520
Variance
+0 lb -29 lb
± .6"
± 6"
± 0.5
-0 yr +5 yr
-0% +25%
-0% +25%
±15 min
±5 min
Specification
PCI
16
8
±0.05 V ±10 V
16 bits
333 kS/s
2, 24 bit
±42 V
2M between channels
1M between channels and ground
Maximum voltage
42 Vrms or 42 VDC
Channels
8
Input coupling
DC
Maximum voltage
±10 V
Nonlinearity
>0.02%
Gain error
±35%
© Senior Design Team 02021
Page 63 of 184
4.5 Design Procedures
The design process to be used by the team for this project will generally follow the
twelve facets set forth in Dr. Hensel’s DesignPlanner™. Utilizing the four-step PDCA cycle, we
will work through each of the facets, preparing for the next stage in the design process.
The first facet of the design process was to recognize and quantify the needs. In doing
this, every team member became familiar with the project requirements and goal. This important
process resulted in a document that can be referenced to determine what the needs of the
customer are and how they will be met.
After completing the Needs Assessment, we began the stage entitled Concept
Development. The team brainstormed to generate a list of equipment that would satisfy
requirements set forth by the customer. Ideas were combined to create new ideas. While the
brainstorming process was under way, every idea was presented and none of the ideas was
critiqued until after the process was complete. After an abundance of ideas was presented, each
of the team members had a number of votes equal to 20% of the total to distribute about the
devices. Once the list of ideas had been narrowed down to the top four choices, the design team
participated in a group drawing activity to begin developing the ideas. Each team member
started a drawing, passed the drawing to another team member and continued a drawing started
by another team member. While participating in the group drawing activity, the team members
included all the parts in the drawings and as much information about the concepts as possible.
After the team drawing exercise was complete, the team utilized an “empathy” technique to
determine if the system being developed was ‘connected’ and to make sure every possible
situation had been considered.
© Senior Design Team 02021
Page 64 of 184
After the most promising ideas had been chosen and the concepts were starting to
develop, a feasibility analysis was conducted to determine the top three ideas. By examining
twelve different aspects of each of the ideas, it was possible to determine which ideas proved to
have the most merit and which idea would be more tedious and difficult to realize. The team
analyzed the four devices using a radar plot.
At this point in the design process, the group revisited the Needs Assessment and
established the design objectives and performance specifications that we will later use to
determine the project’s success upon completion. This included how the equipment would
comply with safety codes and other design standards. A list of yes/no questions was created to
ensure all the design objectives are met. A table was also created with all the performance
specifications that will be monitored, the desired quantitative value, and a tolerance around that
value. By using this, the team will be able to determine exactly how well the concept met the
needs set forth by the customer.
The next step in the design process is to implement each of the device concepts into CAD
software. Following this, a series of analyses will be conducted on each of the devices to verify
the fortitude of the design. These analyses will include a stress analysis on all parts that will be
experiences significant loading, a fatigue analysis on all parts being subjected to repetitive
loading, and other analyses such as an analysis of the fluid flow through the waterwheel system.
The group will also complete a drawing package of components and assembly drawings for each
of the devices. A bill of materials will also be created to accompany the drawing packages. It
will include all the components and the materials that will be used, any components that are to be
purchased, the vendor, and cost, as well as a user’s manual containing procedures for assembly,
maintenance, and storage of the equipment.
© Senior Design Team 02021
Page 65 of 184
5 Facet 5: Analysis and Synthesis
5.1 Design Structure Matrix Analysis
5.1.1 Introduction:
To analyze and synthesize our three device concepts we need to understand the
dependencies among the design parameters. The dependencies can be classified into 3
categories: parallel, sequential, and coupled. Parallel design parameters are independent of one
another. When one design parameter must be determined in order to determine another, it is a
sequential dependency. Finally, if two parameters are interdependent, they are referred to as
having a coupled dependency. By listing the parameters and their dependencies, a logical
process for determining the parameters can be devised using a design structure matrix.
5.1.2 Chua’s Circuit:
Table 4: Chua's Circuit DSM Input
Name
Power supply
2k Potentiometer
C1
C2
Nonlinear resistors
Output leads
Scope
Speakers
Inductor
© Senior Design Team 02021
1
2
3
4
5
6
7
8
9
1
1
2
1
2
1
1
3
1
1
3
1
4
1
1
1
4
5
1
1
1
1
5
1
1
1
1
1
1
1
1
1
1
1
1
1
1
6
7
8
9
1
1
1
1
6
1
1
1
7
1
1
1
1
9
8
Page 66 of 184
Table 5: Chua's Circuit DSM Results
Nonlinear resistors
2k Potentiometer
C1
C2
Inductor
Power supply
Output leads
Scope
Speakers
5
5
1
1
1
1
1
5
2
3
4
9
1
6
7
8
1
1
2
3
4
9
2
1
1
1
1
1
1
1
1
3
1
1
1
1
1
1
1
1
4
1
1
1
1
1
9
1
1
1
1
1
1
1
6
7
8
6
1
1
1
7
1
1
8
Chua’s circuit displayed many things in its design structure matrix output. First, the team
should determine the size of the nonlinear resistors. Next, four of the parameters are coupled:
the potentiometer, the capacitors, and the inductor. These must be chosen based on ratios
necessary for operation. Once the electronic components have been chosen a power supply can
be determined. Finally, the output leads, coupled with the scope and speakers, must be
determined last.
5.1.3 Multi-well Oscillator:
Table 6: Multi-well Oscillator DSM Input
Name
Power supply
Motor
Magnets
Forcing beam
Oscillating beam
Base
Vertical support
Strain gages
© Senior Design Team 02021
1
2
3
4
5
6
7
8
1
1
1
1
2
1
2
3
1
4
5
1
1
1
1
5
3
4
1
1
6
1
1
1
6
1
7
8
1
1
1
1
1
7
8
Page 67 of 184
Table 7: Multi-well Oscillator DSM Initial Results
Power supply
Motor
Magnets
Forcing beam
Oscillating beam
Base
Vertical support
Strain gages
1
2
3
4
5
6
7
8
1
1
1
1
2
1
2
3
1
4
5
1
1
1
1
5
3
4
1
1
6
1
1
1
6
7
8
1
1
1
1
1
7
1
8
Table 8: Multi-well Oscillator DSM Results, Motor dependencies removed
Motor
Power supply
Magnets
Forcing beam
Oscillating beam
Base
Vertical support
Strain gages
2
1
3
4
5
6
7
8
2
2
1
1
3
1
1
1
3
4
5
6
7
8
1
4
1
1
1
5
1
6
1
1
1
1
1
1
1
7
1
8
Table 9: Multi-well Oscillator DSM Results, Magnet dependencies removed
Motor
Magnets
Power supply
Forcing beam
Oscillating beam
Base
Vertical support
Strain gages
2
3
1
4
5
6
7
8
2
2
1
3
1
3
1
1
4
5
4
1
1
5
1
6
1
1
1
6
7
8
1
1
1
1
1
7
1
8
Table 10: Multi-well Oscillator, Strian Gage dependency on Power Supply removed
Motor
Magnets
Forcing beam
Oscillating beam
Base
Vertical support
Strain gages
Power supply
© Senior Design Team 02021
2
3
4
5
6
7
8
1
2
2
3
4
5
4
1
1
5
6
7
8
1
1
1
1
3
1
6
1
1
1
1
1
1
7
8
1
1
Page 68 of 184
The oscillator was more difficult to simplify using a design structure matrix. The
program’s initial output was the same as the team’s input. Therefore, the dependencies upon the
motor and magnets were removed. Also the dependency of the strain gage on the power supply
was removed for the final output. From the simplified matrix, the motor and magnets should be
chosen first. Then, decisions can be made about the forcing beam, oscillating beam, base,
vertical support and strain gages. Finally, the team can choose an appropriate power supply for
the motor, magnets and strain gages.
5.1.4 Chaotic Waterwheel:
Table 11: Chaotic Waterwheel DSM Input
Name
Wheel Size
Basin Size
Resevoir Size
Cup Size
Base Size
Pump
Brake Lining
Spring
Source Piping
Overflow Piping
Nozzle/Piping Size
Valve Size
Support Structure Size
Wheel Inertia
Flow Meter
© Senior Design Team 02021
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
1
1
1
2
3
2
4
5
6
7
8
9
10 11 12 13 14 15
1
3
1
4
1
5
1
6
1
1
1
1
1
7
1
8
1
1
1
1
1
9
1
1
1
10 1
11
1 12
1
1
13
1
14
1
15
Page 69 of 184
Table 12: Chaotic Waterwheel DSM Results
Wheel Size
Spring
Reservoir Size
Cup Size
Nozzle/Piping Size
Support Structure Size
Wheel Inertia
Basin Size
Brake Lining
Source Piping
Valve Size
Base Size
Pump
Overflow Piping
Flow Meter
1
8
3
4
11
13
14
2
7
9
12
5
6
10
15
1
1
8
3
4 11 13 14
2
7
9 12
5
6 10 15
8
3
1
1
1
1
1
1
4
1 11
1
1
1
13
1
1
14
2
1
1
1
1
7
1
1
9
12
1
1
1
1
5
1
1
6
10
1 15
After listing the waterwheel components and their dependencies, the simplified design
structure matrix leads us through the following design procession. First, the wheel size and
spring should be chosen. Next, the team can iterate between tradeoffs with the reservoir size,
cup size, nozzle/pimping size, support structure size and wheel inertia. Finally, we can
determine the basin size, brake lining, source piping, valve size, base size, pump, overflow
piping and flowmeter.
© Senior Design Team 02021
Page 70 of 184
5.2 Chua’s Circuit: Theory and Simulation
5.2.1 Theory
Chua’s Circuit is an example of a simple nonlinear circuit. Dr. Leon O. Chua, a pioneer in
the field of nonlinear circuit theory, created the circuit to simulate a variety of nonlinear
behavior. The circuit, modeled after the Lorenz Equations, can be used to demonstrate
bifurcations and chaotic behavior.
The basic circuit consists of an inductor, two capacitors, linear resistors, and a nonlinear
component called a Chua’s Diode. The inductor, capacitors, and resistors form a linear
oscillator, while the Chua’s Diode contributes the nonlinear portion of the circuit. By changing
the circuit parameters the circuit will display different types of nonlinear behavior.
Figure 3: Chua’s Circuit Schematic
Kirchoff’s Laws give us these equations for the above circuit in Figure 3.
C1
dV1 V2 V1
g (V1 )
dt
R
(Equation 1)
C2
dV2 V1 V2
IL
dt
R
(Equation 2)
© Senior Design Team 02021
Page 71 of 184
L
dI L
rI L V2
dt
(Equation 3)
The –g(V1) in Equation 1 represents the nonlinear current voltage characteristic of the
nonlinear resistance. The current voltage characteristic, shown in Figure 5, is a piecewise linear
curve.
Chua’s diode can be realized using an operational amplifier and linear resistors. An
example of this setup is shown in the circuit diagram below.
Figure 4: Chua’s Diode Schematic
In this case two op-amp networks arranged in parallel represent the nonlinear resistance.
The nonlinearity of the “nonlinear resistor” is dependent on the saturation of the op-amp pair.
The op-amps are operating with both positive and negative feedback, which makes analyzing
them a difficult task. When the circuit is powered, the op-amps enter saturation, causing the
output to rail. When the voltage ‘V1’ reaches its peak value, the oscillations from the inductor
‘L’ and the capacitor ‘C2’ are introduced. It appears that when capacitor ‘C1’ discharges, the
© Senior Design Team 02021
Page 72 of 184
voltage is negated at the output of the op-amp. The I-V characteristic of the op-amp network
gives the circuit its nonlinear properties. For the circuit to function properly, the I-V
characteristic should look like the plot shown on Figure 5.
Figure 5: Nonlinear I-V Characteristics
© Senior Design Team 02021
Page 73 of 184
5.2.2 Simulation
In order to determine if the circuit will display various aspects of nonlinear behavior, it
was simulated using PSpice. The circuit was created in the schematics editor and was simulated
using various control parameters. The computer program produces an output waveform of the
voltage or current being examined. By examining the time series, it is possible to determine if
chaotic behavior is present. The collected waveforms were then inputted to Matlab for further
analysis.
A schematic of the first circuit analyzed can be seen in Appendix C. The circuit consists
of an inductor, two capacitors, a potentiometer, two diodes, an operational amplifier, and several
linear resistors. The inductor, two capacitors, and the potentiometer function together to form a
linear oscillator, and the two diodes and op-amp constitute the nonlinear part of the circuit. A
power supply sends a positive and negative nine volts to the circuit and powers up the op-amps.
The purpose of the diode pair is to switch the resistance ‘R2’ in parallel with the negative
resistance from the op-amp.
The circuit was simulated using a transient analysis with a sampling time of ten
nanoseconds and a final time of fifty milliseconds. The voltages at two locations on the circuit
were recorded. These two voltages could then be plotted against each other. Figure 6 shows the
result of the simulation with the resistance parameter R = 1.2 kΩ.
© Senior Design Team 02021
Page 74 of 184
Chua's Circuit V1 vs.
V2
8
6
V2 (volts)
4
2
0
-2
-4
-6
-8
-10
-5
0
V1 (volts)
5
10
Figure 6: 2-D plot of Chua’s Circuit Output with R = 1.2 kΩ
The chaotic behavior of this circuit appears to be very weak. The research that was done
on this circuit shows that by increasing R, the instability of the system will increase. The next
trial with R = 1.21 kΩ looks very similar to the plot in Figure 6. Figure 7 shows what happens if
the value of R is raised to 1.22 kΩ. The results of this simulation show very little unusual
activity in the circuit. It appears that the circuit has converged to a periodic motion with a very
small amplitude. The simulation for R = 1.23 kΩ produces similar results. The results from
these simulations are significantly different from those found in the literature. All of the
simulations produced results similar to the data seen in Figure 6 or Figure 7.
© Senior Design Team 02021
Page 75 of 184
-8
3
x 10
Chua's Circuit V1 vs. V2
2
V2 (volts)
1
0
-1
-2
-3
-4
-6.1125 -6.1124 -6.1123 -6.1122 -6.1121 -6.112 -6.1119 -6.1118 -6.1117
-3
V1 (volts)
x 10
Figure 7: 2-D plot of Chua’s Circuit Output with R = 1.23 kΩ
The results of the simulations did not match what was found in our research. To
determine the cause of this discrepancy, the values of the capacitor ‘C1’ were varied. Changing
the capacitor did prove to be effective. The results were generally worse with a different
capacitor. After this the value of the inductor was increased. Again this resulted in no change in
the performance of the circuit. Different models of op-amps were also tried. Nothing that was
done to the circuit had any effect on the general way it was behaving. Without extensive
knowledge of nonlinear circuitry it was difficult to predict how the circuit was going to behave.
Fortunately after doing a bit more research, another circuit design was discovered. The major
differences between the two circuits are the pair of diodes is not present in the second circuit and
there are two different nonlinear resistors arranged in parallel.
© Senior Design Team 02021
Page 76 of 184
The new circuit was modeled and prepared for simulation. The schematic for Chua’s
Circuit Revision B can be seen in Appendix C. The first attempt at simulating this design
yielded an error. The simulation software reported the problem was a voltage source and/or
inductor loop involving V+. The sources were taken off the schematic and the circuit was
simulated again. This simulation produced an output waveform that showed the circuit was
oscillating, but that there was no evidence of nonlinear behavior. The simulation was then run
with R set to 2 kΩ. The value of R was then incrementally decreased and further simulations
were run. At R = 1.77 kΩ the time series produced by the circuit exhibited chaotic behavior. A
plot of the two voltage time series plotted against each other for this value of R is shown in
Figure 8.
Chua's Circuit V1 vs. V2
1
0.8
0.6
V2 (volts)
0.4
0.2
0
-0.2
-0.4
-0.6
-0.8
-1
-5
0
V1 (volts)
5
Figure 8: 2-D plot of Chua’s Circuit Output with R = 1.77 kΩ
As the value of the resistor ‘R’ is decreased further, the nonlinear behavior of the
circuit becomes more apparent. Figure 9 shows the results of the simulation when R = 1.60 kΩ.
© Senior Design Team 02021
Page 77 of 184
The circuit produces output containing even more defined chaotic behavior. The oscillations
start on the positive side of the ‘V1’ axis and then they switch to the negative side of the axis.
Chua's Circuit V1 vs.
V2
0.6
0.4
V2 (volts)
0.2
0
-0.2
-0.4
-0.6
-0.8
-3
-2
-1
0
V1 (volts)
1
2
3
Figure 9: 2-D plot of Chua’s Circuit Output with R = 1.6 kΩ
The oscillations switch back and forth between negative and positive, which creates the
double scroll attractor seen in Figure 9. The results of the simulation can also be plotted in a
three dimensional graph. In order to do this the current through the inductor, ‘IL’, is also
required. A plot of ‘V1’ vs. ‘V2’ vs. ‘IL’ shows the true three-dimensional attractor of the system.
Figure 10 shows the 3-D plot of this simulation. The results of the 3-D plot display the structure
of the double scroll attractor.
© Senior Design Team 02021
Page 78 of 184
Chua's Circuit V1 vs. V2 vs.
IL
-3
x 10
3
IL (amps)
2
1
0
-1
-2
-3
1
0.5
0
V2 (volts)
-0.5
-1 -4
-2
2
0
4
V1 (volts)
Figure 10: 3-D Plot of Chua’s Circuit Output with R = 1.60 kΩ
Another important aspect is the current-voltage characteristic of the nonlinear resistor.
To plot the characteristic the voltage across the nonlinear resistor ‘V1’ is plotted against the sum
of the currents through resistors ‘R1’ and ‘R4’. This will allow use to verify the characteristics of
the nonlinear resistor. As can be seen in Figure 11, the current voltage characteristic is a
piecewise linear curve. Using this curve, the circuit can be analyzed mathematically to make
sure all the parameters are correct.
© Senior Design Team 02021
Page 79 of 184
-3
2
Chua's Circuit I-V
Characteristic
x 10
1.5
I (amps)
1
0.5
0
-0.5
-1
-1.5
-2
-3
-2
-1
0
V (volts)
1
2
3
Figure 11: Nonlinear resistance profile with resistance parameter R = 1.60 kΩ
A Fourier analysis of the output voltage ‘V1’ was also performed. This was done to
verify that the output is not periodic and that it exists in the range of audible frequencies. Since
the output will be passed to a speaker, it is prudent to make sure that the sound can be heard.
Figure 12 shows a plot of this analysis. The circuit runs in the frequencies between 0 and 300
radians per millisecond. The data is presented in this fashion because the time units of the data
produced by PSpice are in milliseconds. Note that the frequency where the spectrum reaches its
maximum amplitude is about 5 radians per millisecond. To convert the frequency to Hertz, the
frequency is divided by 2π radians and multiplied by 10³. The resulting frequency is about 800
Hz. The circuit responds to frequencies up to 300 radians per millisecond, which is
approximately 48 kHz. The range of audible frequencies goes from to about 40 Hz up to about
20,000 Hz, so there should be no problems “listening” to the dynamics of the circuit.
© Senior Design Team 02021
Page 80 of 184
Fourier Analysis of
V1
800
700
Amplitude
600
500
400
300
200
100
0
0
100
200
300
400
500
600
700
Frequency
(rad/ms)
Figure 12: Frequency Analysis of Chua’s Circuit for R = 1.60 kΩ
800
The objective of this analysis was to determine if the circuit would exhibit nonlinear
behavior. The simulation proves that the second circuit design contains nonlinearities and can
produce chaotic behavior. The simulations confirm that the circuit will perform as it is expected.
Furthermore it shows that there is a very good chance that the interesting dynamics of the circuit
is physically realizable.
© Senior Design Team 02021
Page 81 of 184
5.3 Multi-well Oscillator: Theory and Simulation
5.3.1 Theory
The forced double-well oscillator referred to in this device is a magneto-elastic
mechanical system. The main component of this system is a long, slender beam that is fixed to
the framework of the system and suspended over a horizontal surface on which two magnets
reside. By adding a third magnet directly underneath the hanging position of the beam, a Triplewell Oscillator can be created. The triple-well system will behave similarly to the Double-well
Oscillator with the addition of a third stable position between the previously existing two.
The beam of the Double-well Oscillator is situated so that it will hang directly between
the two magnets in the absence of the magnetic fields. Ferrous material is used for the beam to
allow the magnetic fields to affect its behavior. From its equilibrium position, the ferrous beam
will buckle toward one of the two magnets. Due to the fields created by the magnets, there is a
position where the two magnetic fields are of equal strength creating an unstable fixed point in
the system. An unstable fixed point, similar to a local peak, is a point where the system will
remain if placed exactly at the point, but if the system deviates by the slightest amount, it will
quickly move away to the closest stable fixed point or local trough.
Figure 13: Diagram of a Double-well Oscillator Concept
© Senior Design Team 02021
Page 82 of 184
The beam will continue to buckle in the direction of the same magnet until a disturbing
force is applied. After the disturbing force has been applied to the beam, it will again buckle
toward one of the magnets depending on which basin of attraction is resides. A basin of
attraction consists of all the points that will result in the system converging to a single stable
fixed point or attractor. In very rare instances, the beam may reside at the unstable fixed point
between the magnets. This situation is so rare in this physical system that the possibility that it
will occur is negligible. When a sinusoidal force is applied to the system, the beam will begin to
oscillate with a small amplitude about the magnet where it was located. If the initial position of
the end of the beam were between the two magnets, it would quickly converge to a periodic
motion above one of the magnets. When the magnitude of the sinusoidal force is increased, a
different behavior can be observed. From an initial position between the magnets, the beam will
move between the two magnets erratically for a short period of time eventually converging to
periodic oscillations above one of them. This brief amount of aperiodic motion, before the
system converges to a periodic solution is referred to as transient chaos. This short-lived
behavior can be labeled as chaotic because two initial positions very close to each other will
diverge exponentially and may even result in the two trajectories converging to completely
different periodic solutions.
After the magnitude of the applied force has been increased even further, the behavior
that was labeled as transient chaos will continue and never converge to a periodic solution.
When the applied force has a magnitude at this level, the smallest variance in the initial condition
will result in the two resulting trajectories diverging exponentially away from each other. This
behavior is one of the most common identifying characteristics of a chaotic system. The tip of
© Senior Design Team 02021
Page 83 of 184
the magneto-elastic beam will move from one magnet and back to the other in a completely
erratic fashion. Although it may appear that the beam is moving completely randomly, it is in
fact governed by and displaying deterministic behavior.
This type of behavior would be analogous to what would occur if a ball, constrained to
two-dimensional motion, was placed on a surface that consisted of steep walls enclosing an area
and a bump in the middle. The surface of the Triple-well Oscillator analog would have two
bumps in the middle. Profiles of these surfaces can be seen in Figures 14 and 15.
Figure 14: Double-well Analog Profile
Figure 15: Triple-well Analog Profile
As the surface is shaken back and forth, the amplitude of the applied oscillations will
determine the motion of the ball. The ball will start by rocking back and forth in one of the wells
until the amplitude of oscillation is large enough that the ball will move over the bump in the
center of the surface. At an amplitude that gives the ball just enough energy to roll up to the top
of the bump, the well that the ball rolls into will be dependent on the motion of the surface at that
instance. At this time, chaotic behavior will occur. When the amplitude of oscillation is
increased further, the ball will have enough energy to pass over the bump with little affect on its
motion. When this occurs, the ball will converge to a periodic solution in which the ball moves
from one side of the surface to the other.
© Senior Design Team 02021
Page 84 of 184
By observing the time series of the position of the end of the beam, very little order or
structure can be found. A time series of the velocity of the end of the beam would also appear
not to have observable repeating behavior. When the velocity of the end of the beam is plotted
against its position at the corresponding time values, a degree of structure can be seen in the
system that was not apparent before. For this particular system, the graph produced is a twodimensional projection of a three-dimensional trajectory. It is for this reason that the trajectory
appears to intersect itself. An intersection would represent ambiguity concerning the behavior at
the point of intersection. Chaotic behavior is deterministic and therefore this can never occur.
To further examine the structure within the chaotic signal, this two-dimensional
projection can be sampled with the same frequency as the applied sinusoidal force. This method
will produce a graph known as a Poincaré Map. Due to the nature of the Poincaré Map, a larger
length of data points must be collected. However, the Poincaré Map can be used to observe a
more defined structure within the chaotic attractor. A chaotic attractor is an area in space that
draws in all nearby trajectories but does not cause them to converge to a single solution. The
chaotic attractor is also defined by the exponential divergence of nearby trajectories.
In numerous dynamic systems it is difficult to measure many or all of the state variables
that define a particular system’s behavior. In such cases, observing a single time series of one of
the state variable can provide very little information about the structure of the chaotic attractor.
Fortunately, extensive research has determined that all the information that defines a chaotic
attractor can be found in any one of its state variables. Therefore, it is possible to run a simple
analysis on a single time series from a dynamic system and recreate the two-dimensional
projection of the trajectory. It is even possible to create a Poincaré Map from this data to
observe the structure of the chaotic attractor.
© Senior Design Team 02021
Page 85 of 184
5.3.2 Simulation
After researching other work done with Double-well Oscillators, it was determined that
the horizontal displacement of the tip of the beam could be modeled using the following
differential equation:
x x x x 3 F * cos( * t )
(Equation 4)
In this equation, a version of the Duffing Equation, ‘x’ is the horizontal displacement at
the end of the beam from the neutral position between the two magnets, ‘’ is the damping
constant for the system, ‘F’ is the strength of the applied force, and ‘’ is the frequency of the
applied force. An equation can be derived to simulate the Triple-well Oscillator by the addition
of an ‘x5’ term. Using the Simulink function in Matlab, a symbolic representation of this second
order differential equation was created to simulate the dynamics of the given system.
Figure 16: Simulink model of Double-well Oscillator Equation
The damping ratio and the forcing frequency were set to 0.25 and 1, respectively, and the
magnitude of the force was varied to produce various types of nonlinear behavior. For a low
© Senior Design Team 02021
Page 86 of 184
force amplitude, F = 0.18, the simulation supported the research, indicated that the beam would
oscillate with a small amplitude about one of the magnets. Figure 17 shows that depending on
which magnet the beam is initially buckling toward, it will oscillate about that position.
Figure 17: Simulation of beam displacement demonstrating periodic behavior
When the forcing amplitude is increased slightly, F = 0.25, the vibrations are erratic but
eventually settle to periodic behavior. Due to the transient chaos that precedes the periodic
behavior, the particular magnet over which the beam will oscillate is evidence of sensitive
dependency on the initial conditions. A beam starting over one of the magnets may end up
oscillating above the other after the chaotic behavior has receded.
© Senior Design Team 02021
Page 87 of 184
Figure 18: Simulation of beam displacement displaying transient chaos
The amplitude of the forcing function may be increased to a point at which the transient
chaos does not eventually converge to periodic behavior. Using a value of F = 0.40, the chaotic
behavior seen in Figure 19 was produced. Longer simulations were run with these parameters to
determine if the system eventually converged to a periodic solution. After twenty times the
shown time interval, the system had made no progress toward converging to a periodic solution,
supporting what was found through our research.
Figure 19: Simulation of beam displacement displaying chaotic behavior
© Senior Design Team 02021
Page 88 of 184
Using the simulation, it was possible to record the velocity of the tip of the beam along with
its position. An initial observation of the velocity at the tip of the beam also indicates the
existence of chaotic behavior.
Figure 20: Simulation of beam velocity displaying chaotic behavior
Using these two time series, it is possible to create a two-dimensional projection of the
three-dimensional trajectory as stated above. By combining the two data series, the resulting
graph reveals that there is indeed structure within the dynamics of the system.
Figure 21: 2-D projection created from simulation displacement and velocity
© Senior Design Team 02021
Page 89 of 184
Including the time as an additional coordinate, the true, three-dimensional strange
attractor can be seen. This shows that the trajectories do not intersect.
Figure 22: Simulated strange attractor of double-well oscillator
The values used to create the two-dimensional projection were then sampled at the same
frequency as the forcing function. These values were then used to create a Poincaré Map of this
data. This Poincaré Map displays further detail hidden within the dynamics of this system.
Figure 23: Poincaré Map created from Double-well Oscillator Simulation
Creating the two-dimensional projection and Poincaré Map seen above required two
different values to be recorded to be from the system. Because this may not be very easy or
© Senior Design Team 02021
Page 90 of 184
convenient, a procedure has been developed that enables a two-dimensional projection to be
created as well as a Poincaré Map if only one time series is available. This method uses the
available single time series and plots it against another value from the same time series that
occurs after some establish time delay. From these two sets of data, sampling it at the forcing
frequency will produce a Poincaré Map. The two will not be identical, but nevertheless they will
display similar characteristics.
Figure 24: Reconstructed attractor projection from
simulated displacement
Figure 25: Poincaré Map from reconstructed
attractor projection
Once the force amplitude is increased further to a value of F = 0.50, the simulation
produces results indicating that the beam will oscillate with enough energy that the space
between the magnets will have very little affect on the system’s behavior.
© Senior Design Team 02021
Page 91 of 184
Figure 26: Simulated displacement for a high forcing magnitude
To further examine the signal and validate its non-periodic behavior, a power spectral
density graph was created for the displacement output with a forcing magnitude of F = 0.40.
This graph shows that there is still a large amount of energy at the forcing frequency but there is
also a level of energy that remains over a wide range of frequencies. A simple periodic signal
would show heightened energy levels at some frequencies while the remaining frequencies
would have very little or no energy.
Figure 27: Power spectral density of simulated chaotic signal
© Senior Design Team 02021
Page 92 of 184
5.4 Multi-well Oscillator: Stress/Deflection Analysis
In the oscillator, the horizontal forcing beam must interact with the vertical oscillating
beam so it moves between the magnets. Therefore, the team decided on a desired end deflection
for the horizontal beam. This allowed the specification of the force due to the offset mass.
Finally, the team ascertained the stress and made sure it was within the limits dictated by
material properties.
The horizontal beam of the oscillator receives a force input from the offset mass mounted
on a small electric motor. A free body diagram for the offset mass is shown in Figure 28.
Figure 28: Diagram of Offset Mass
V2
Fmass m
r
m steel Al V
(Equation 5)
(Equation 6)
Fmass steel Al V r
2
(Equation 7)
The force that the horizontal beam experiences due to the offset mass is equal to the
product of the difference in density of the metals, the volume of the mass, the mass offset
distance, and the rotational speed squared. The team desired a force that would deflect the end of
the beam by at least ½”. Also, the desired rotational speed was dictated by the natural frequency
of the oscillating beam.
© Senior Design Team 02021
Page 93 of 184
Assuming the beam to be a linearly elastic member, the deflection is given by the
following equations.
Figure 29: Diagram of Cantilever Beam with Intermediate Load
y
2
Fmass x 2
x 3a , x a; y Fmassa a 3x , x a
6EI
6 EI
(Equation 8)
Here, ‘Fmass’ is the offset mass input, ‘a’ is the distance to the motor mount, ‘E’ is the
Modulus of Elasticity, ‘I’ is the moment of inertia, and ‘x’ is the location being analyzed. The
team selected aluminum as a material and decided that the beam should be at least 12” long and
2” high.
© Senior Design Team 02021
Page 94 of 184
The following graph depicts the end deflection of the forcing beam as a function of motor
mount position.
Oscillating Beam Deflection
0.6
End Deflection (in)
0.5
0.4
0.3
0.2
0.1
0
0
2
4
6
8
10
12
Distance from Motor Mount to Vertical Support (in)
Figure 30: End Deflection as a Function of Motor Position
The maximum stress location for the beam will be at the motor mount, i.e. x = a. The
following relations give the bending stress, shear stress, principal stress, and factor of safety.
max
max
Fmassa
w
2
I
3Fmass
2 wh
2
2
I max
max
I
nd
Sy
© Senior Design Team 02021
(Equation 9)
(Equation 10)
(Equation 11)
(Equation 12)
Page 95 of 184
Table 13: Results of Force and Stress Analyses
Bending Stress
Shear Stress
Principal Stress
Yield Factor of Safety
Diameter of Mass
Radius from Center of Rotation
Height of Mass
Force produced by Mass
Quantity
max
max
max
nd
dmass
rmass
hmass
Fmass
Value
18787.9
352.273
18791.2
2.5065
0.285
0.3
0.25
88.07
Units
psi
psi
psi
in
in
in
lb
These calculations were done using the 2024-T351 aluminum specifications listed on the
matweb.com website. The yield strength of the material was listed as Sy=47100 pounds per
square inch and the ultimate tensile strength was listed as Sut=68200 pounds per square inch.
Using these values, the calculations show that for the given component dimensions a yield factor
of safety greater than 2.5 will exist. This complies with the performance specifications that were
agreed on by the project’s customer.
© Senior Design Team 02021
Page 96 of 184
5.5 Multi-well Oscillator: Beam Frequency Analysis
To ensure that the force applied to the horizontal beam would result in the oscillation of
the hanging beam, a lumped mass analysis was performed on the two-beam system. The
horizontal beam was represented by two lumped masses. One of the lumped masses was located
at the position of the small electric motor and the motor guide and the other at the end of the
beam where the vertical beam is mounted. The mass used for each position was the mass of all
the components that were located at the given position and a fraction of the beam as determined
from the Rayleigh Method for determining the effective mass. The lumped effective mass for
the vertical beam was determined from the mass of the member. Using the Rayleigh Method, the
effective mass of a beam with cantilever end conditions is 33/140 of the mass of the beam.
L
1
2 m
T y( x) beam dx
20
L
T
1
meff x 2
2
M eff
33
mbeam M mass
140
(Equation 13)
(Equation 14)
(Equation 15)
After determining the effective masses of the three-degree of freedom system, the
effective stiffness for each beam was determined. The equation for this value was derived from
the deflection equation for a cantilever beam. By solving the equation for the force divided by
the displacement, an equation for the effective stiffness of the member can be determined using
the length of the beam ‘L’, the modulus of elasticity of the material ‘E’, and the moment of
inertia of the material ‘I’.
y max
FL3
3EI
© Senior Design Team 02021
(Equation 16)
Page 97 of 184
F
3EI
k eff 3
y max
L
(Equation 17)
With the effective masses for the lumped approximation and the effective stiffness
between each lumped mass, an approximation can be made of the natural frequencies of the
system. By determining the natural frequency of the vertical oscillating beam, we were able to
determine the rotational speed that will be required of the motor to produce an input force with a
frequency near the natural frequency of the vertical beam. We can also verify that the natural
frequencies of the horizontal beam will not be near that of the vertical beam. This will ensure
that the response of the horizontal beam will be in a safe area and the structural integrity of the
beam will not be a concern.
n
k eff
meff
(Equation 18)
The spread sheet created for this analysis allowed us to examine the different
characteristics of the system if the beams were of different sizes or composed of different
materials. With the use of this design tool, the final choice of dimensions could be made with
the additional knowledge of the approximate natural frequencies of the two dynamic components
of the Multi-well Oscillator.
© Senior Design Team 02021
Page 98 of 184
5.6 Multi-well Oscillator: Fatigue-Failure Analysis
With the thin vertical beam in the Multi-well Oscillator device being exposed to a
potentially large number of cycles, the decision was made to conduct a fatigue failure analysis on
the member. When the system is in operational mode, the input force will be tuned very close to
the natural frequency of this hanging beam. This will result in a very large response by the
oscillating beam. The frequency of the input force will be smaller than the first natural
frequency of the horizontal beam. This beam will also be much larger and able to handle a much
larger force. For this reason, a similar analysis was not conducted on the horizontal beam.
To examine if there is a risk of a fatigue failure in the vertical oscillating beam, the
endurance limit of the beam was calculated using the Endurance-Limit Modifying Factors
Method presented in Mechanical Engineering Design by Joseph Shigley and Charles Mischke.
Using this method, the endurance limit for the machine element was determined. The endurance
limit is the maximum stress value that will result in infinite life. Stress values that exceed this
limit will result in a life of less than one million cycles. The Endurance-Limit Modifying Factors
Method determines the endurance limit of the machine element based on the endurance limit of a
specimen of the material along with the operating and environmental conditions of the
component. For materials that have a minimum tensile strength less than or equal to 200,000
pounds per square inch, the endurance limit of the specimen can be calculated by multiplying the
minimum tensile strength by 0.504. Materials that have a minimum tensile strength greater than
200,000 pounds per square inch are assigned a specimen endurance limit of 100,000 pounds per
square inch. This value is then multiplied by the modifying factors to produce the endurance
limit of the machine element. The four main modifying factors are dependent on the surface
characteristics of the component, the size of the component, the type of load on the component,
© Senior Design Team 02021
Page 99 of 184
and the temperature in which the component will be operating. The fifth modifying factor is
based on miscellaneous effects that are not covered by the other modifying factors. Some items
covered by the miscellaneous effect are corrosion, electrolytic plating, metal spraying, cyclic
frequency, frottage corrosion, and stress concentrations.
The endurance limit was calculated for the oscillating vertical beam used on the Multiwell Oscillator. The beam, designed from 1018 Cold Rolled Steel, has a minimum tensile
strength of 64,000 pounds per square inch. Following the convention stated previously, the
specimen endurance limit for the material is 0.504 times 64,000 pounds per square inch.
The first modifying factor, the surface factor is defined in the following manner.
k a aS ut
b
(Equation 19)
This factor is dependent on the minimum tensile strength of the material and the surface
finish of the material. The material that will be used for the beam will have a cold-drawn finish.
This will result in value of a = 2.70 and b = -0.265.
The size factor is the second modifying factor to consider when determining the
endurance limit of the component. This value is dependent on the effective diameter of the
component. The effective diameter of a rectangular component can be determined with the
following equation.
d e 0.808(bh)
1
2
(Equation 20)
Using a width of h = 1 inch and a thickness of b = 0.0239 inch for the 24 gauge steel, the
effective diameter was determined to be 0.125 inches squared. With this value, the size factor
can now be calculated using the following equation.
d
kb
0.3
0.1133
© Senior Design Team 02021
(Equation 21)
Page 100 of 184
The third modifying factor, the load factor, is dependent of the type of load the machine
element is experiencing. In this case, the component is being analyzed for bending. This results
in a load factor of kc = 1.
The temperature factor accounts for the difference between the operating conditions and
the conditions when the specimen was tested. This value is merely a ratio of the tensile strength
at operation temperature to the tensile strength at room temperature. In the application that is
being explored, the component will be operating in room temperature. This results in a
temperature value of kd = 1.
The final modifying factor, the factor to cover the miscellaneous effects will also be 1.
The machine element will be operating in a controlled laboratory environment and will not be
subjected to any additional circumstances that are not covered in the previous for modifying
factors. For this reason, the final modifying factor is also a value of one.
Table 14: Modifying Factors to determine Endurance Limit
Modifying Factor
Surface Factor
Size Factor
Load Factor
Temperature Factor
Miscellaneous Effect
ka = 0.7972
kb = 1.1044
kc = 1.0000
kd = 1.0000
ke = 1.0000
After determine all the modifying factors, the endurance limit was calculated to be about
28,400 pounds per square inch. Using this value, the stress in the beam was calculated for
various tip deflection values. Maintaining a fatigue failure safety factor of at least 2.5, the beam
can deflect at the tip by one and one-eighth inch. A preliminary analysis of the magnetic system
indicates that there will be only small deflections at the tip of the beam. Given this information,
the design for the multi-well oscillator will allow infinite life for the vertical oscillating beam.
© Senior Design Team 02021
Page 101 of 184
5.7 Multi-well Oscillator: Magnetic Field Analysis
The purpose of this analysis is to determine what type of electromagnets to use for the
Multi-well Oscillator device. The electromagnet needs to be strong enough to pull the steel strip
towards the magnet when it is turned on. This analysis and experimentation will help us
determine how strong the electromagnets need to be.
IMI, Industrial Magnets, Inc., manufactures 12-volt electromagnets with threaded
mounting holes. These magnets are available in sizes that can be used for our application and are
easily mountable. Through correspondence with the company, it has been determined that a
round electromagnet is best suited to our application. The reason for this decision is that a round
electromagnet produces a stronger magnetic field than a rectangular one. To mathematically
determine the force a magnet will produce on the steel strip at a given distance is a complicated
problem. When the steel strip is in the presence of a magnetic field, it will become magnetized
itself. In order to calculate the force the steel strip will experience from the magnetic fields, the
magnetization of the steel strip must be known. The magnetization is dependent on the magnetic
field produced by the electromagnet. To calculate this magnetic field the number of coils, the
current passing through the coils and the core material must be known. Without the
electromagnet to examine, there is not enough information to perform this mathematical analysis.
Next quarter, after the electromagnets have been obtained, an experimental analysis will be
performed to determine the force on the steel strip.
The vendor notified the team that they perform this type of analysis for many of their
customers to help them choose a magnet. Because the vendor charges for this service, the team
© Senior Design Team 02021
Page 102 of 184
has decided to conduct the experimentation itself. They mentioned that the most successful
method of gaining the information that we require is through experimentation. Varying the
distance from the magnet to the steel beam and the thickness of the steel beam are two other
ways to manipulate the deflection at the tip of the beam when the magnetic force is applied.
The following equations define the force acting on the steel beam as a result of the
magnetic field.
M az M
(Equation 22)
F 0 a z M H
(Equation 23)
F 0
M
H
z
(Equation 24)
Notation:
‘0’= permeability of free space
‘F’ = force
‘M’ = Magnetization
‘H’ = Magnetic Field Strength
© Senior Design Team 02021
Page 103 of 184
5.8 Chaotic Waterwheel: Theory and Simulation
5.8.1 Theory
Willem Malkus and Lou Howard developed the first chaotic waterwheel at MIT in the
1970’s. The device was designed to physically model a system of nonlinear equations that
exhibit chaotic behavior for certain parameter combinations. The system of equations is the
well-known Lorenz Equations. For this reason, a chaotic waterwheel can also been referred as a
lorenzian waterwheel. This set of three first order, nonlinear differential equations were
proposed in 1963 by Edward Lorenz, a theoretical meteorologist at MIT, to model convective
currents in the atmosphere.
Lorenz Equations:
x y x
‘’ is defined as the Prandtl number
y rx y xz
‘r’ is defined as the Rayleigh number
z xy bz
‘b’ does not have a name
These dimensionless values were use by Edward Lorenz in his thermodynamic analysis
of atmospheric convection. These equations have also been used to model a variety of other
physical systems in which cases the control coefficients are either replaced or represent other
relevant parameters.
In the basic model of the chaotic waterwheel, a number of cups are evenly spaced around
the perimeter of a wheel that is free to rotate about an axis. The rotation is resisted by the inertia
of the wheel and viscous damping. A water source, located directly above the center of the
wheel fills the cups with water as they pass underneath. The mass moment of inertia of the
assembly is dependent on the shape and mass of each of the components. The larger the inertia,
the more the wheel will resist any change in motion. This is apparent through the reduced
© Senior Design Team 02021
Page 104 of 184
angular acceleration that results when a moment is applied. The viscous damping in the system
in created by two different sources. The first source is a small brake that is mounted on to the
shaft. The second source of damping is a result of the water that flows into the system. The
exchange of momentum creates a torque on the system that is also resisting the rotational motion.
In both of these cases, the torque produced is proportional to the angular velocity, , so these
values are combined into a damping coefficient ‘v’.
Viscous damping = -v
The other important parameters within this system are those of the flow rates of the water
into the system. The two flow rates are the inflow rate, which is the rate at which the water will
fill the cups, and the leakage rate, which is the rate at which the water will leak out of the cups.
The amount of water in a cup affects the leakage rate because as the cups fill with more water,
there will be more pressure on the water that is leaking out and this will result in a faster outflow
rate.
There are three main types of motion that can occur with the chaotic waterwheel. The
first type of motion occurs when the leakage rate is equal to the inflow rate. When this occurs,
no water will collect in the cup and the small amount of water in the cup will not produce a large
enough moment to overcome the damping of the system. In this case the wheel will remain
stationary with one of the cups in a position where it has water flowing into it at a rate equal to
that which is flowing out.
The second condition occurs when the flow rate of the water into the cup is slightly
greater than the leakage rate. This will cause the cup underneath the nozzle to begin filling with
water. Once it has accumulated enough water so that the resulting moment overcomes the inertia
and damping of the system, the wheel will begin to rotate. The flow rate into the cups in this
© Senior Design Team 02021
Page 105 of 184
situation is low enough that once the wheel has completed a single rotation, the cup approaching
the nozzle has emptied. In this case, the rotation of the wheel will converge into a steady angular
velocity. Because the nozzle is located directly above the center of the wheel, there is an equal
possibility that the initial rotation of the wheel, and subsequently all the motion that follows, will
be in either direction.
The third type of behavior occurs when the flow rate of water into the cups is even
higher. Under these conditions, the cups will still contain water when they return to the position
underneath the nozzle. This action will destabilize the steady rotation and the wheel’s motion
will become chaotic. While this erratic motion may appear random, it is governed by the
system’s state equations. The system of equations for the chaotic waterwheel is given by:
a1 b1 Ka1
(Equation 25)
b1 a1 Kb1 q1
(Equation 26)
v gra1 I
(Equation 27)
The derivation of these equations can be found in Appendix G. The variables ‘a1’ and
‘b1’ are the amplitudes from a Fourier approximation in the mass equation, ‘q1’ is the Fourier
amplitude of the inflow, and is the angular velocity of the wheel. The values of ‘a1’ and ‘b1’
can also be thought of as a relation between the amounts of water that can be found in the
different groups of cups. ‘a1’ can be thought of as the relationship between the amount of water
that can be found in all the cups on the right hand side of the waterwheel and the amount of
water that can be found in all the cups on the left hand side of the waterwheel. Because either
side can have more water than the other at any given time, the value of ‘a1’ cane take on both
negative and positive values. The relationship between the water in the cups on the upper half of
the waterwheel to the water in the cups on the lower half of the waterwheel is represented by
© Senior Design Team 02021
Page 106 of 184
‘b1’. Since water is being added to the cups in the top half and leaking from all the cups, this
value will always be positive, similar to the values of ‘z’ in the original Lorenz equations.
Acceleration due to gravity is represented by ‘g’ and ‘’ is the value of pi. ‘I’ represent the
moment of inertia of the rotating structure, ‘K’ is the leakage rate, and ‘v’ is the rotational
damping rate. These equations are identical to the Lorenz equations for a value of ‘b’ equal to
one. Further analysis shows that the following expression is analogous to the Rayleigh number:
r
grq1
K 2v
(Equation 28)
This dimensionless group represents how hard the system is being driven relative to the
dissipation. The terms ‘g’ and ‘q1’ represent the gravity and the inflow, the sources of motion
within the system. The terms ‘K’ and ‘v’ represent the leakage rate and the rotational damping
rate, both tending to reduce the motion of the system. When the value of ‘r’ is less than one, the
leakage rate is matching the inflow rate and there will be no motion of the system. As the
Rayleigh number is increased, two stable angular velocities will be evident, one clockwise and
the other counterclockwise. The dynamics will converge to one of these motions over time.
After the Rayleigh number is increased even further, the stability of the system will decrease and
it will begin to exhibit chaotic behavior.
© Senior Design Team 02021
Page 107 of 184
5.8.2 Simulation
Using the Simulink function of Matlab, a symbolic representation of the system was
designed to allow for simulation of the dynamics of the system.
a1 b1 Ka1
b1 a1 Kb1 q1
v gra1 I
Figure 31: Simulink Model of Chaotic Waterwheel Equations
For a given system, many of the parameters will be not be adjustable. Of course, the
values of the constants ‘g’ and ‘’ will not change for a vertically oriented waterwheel. The
mass moment of inertia ‘I’ will also be constant with a particular apparatus. The radius at which
the cups are located on the wheel will also be fixed for a particular device and the leakage rate,
which is dependent upon the volume of the cups and the size of the holes in the cups, will also
remain relatively constant for a distinct design. The remaining values that can be varied in order
to produce different types of dynamics are the inflow rate and the rotational damping rate. The
inflow rate is simply controlled by a valve connected to the source of the water. By adjusting the
© Senior Design Team 02021
Page 108 of 184
value is it is possible to vary the inflow rate over a wide range. While the inertial damping
caused by the ‘spin-up’ effect on the water cannot be varied, the amount of damping on the
wheel from the brake can easily be altered. By altering both of these values, it is possible to
change the effective Rayleigh number and Prandtl number that affect the dynamics in the
original Lorenz equations. The equivalent Rayleigh and the Prandtl numbers for the chaotic
waterwheel system are:
Re
grq
K ²v
v
KI
(Equation 29a,b)
Given these equations and the abundance of research already done with the original
Lorenz equations, the next logical step is to define the inflow rate and the rotational damping rate
in terms of the other values and the Rayleigh number and/or the Prandtl number.
q
(Re) K ²v
gr
v KI
(Equation 30a,b)
By substituting the value of ‘v’ into the equation for ‘q’, an equation for the inflow rate
that is not coupled to the rotational damping rate is obtained. This allows the inflow rate and the
rotational damping rate to be a function of the physical system characteristics in order to obtain
the desired type of behavior.
q
Re K ³I
gr
v KI
(Equation 31a,b)
Chaotic behavior is observed when the Rayleigh number is 28 and the Prandtl number is
10. These values and the physical parameters can be utilized in the above equations to calculate
the require inflow rate and rotational damping rate that will produce the desired chaotic behavior.
Using these equations in a Matlab M-file along with the Simulink model, the required
inflow rates and rotational damping rates were determined as well as the response of the
© Senior Design Team 02021
Page 109 of 184
waterwheel under the given conditions. The system characteristics used in the simulations and
the estimated inflow and damping rates are listed in the following table.
Table 15: System Characteristic Values
Acceleration due to gravity
Pi
Radius of cup position
Mass moment of inertia
Leakage rate per mass
9.80665 m/s²
3.14159
0.2032 m
0.0541 kg*m²
1 (kg/s)/kg
Table 16: Inflow and Damping Rate determined from Rayleigh and Prandtl numbers
Rayleigh Number
Prandtl Number
Inflow Rate, (kg/s)
Damping Rate, (kg*m²/s)
1
10
0.0864
0.541
2
10
0.1728
0.541
10
10
0.8641
0.541
15
10
1.2962
0.541
20
10
1.7283
0.541
28
10
2.4196
0.541
35
10
3.0246
0.541
The simulation produced a time series of the angular velocity of the waterwheel as well
as time series for the values of ‘a1’ and ‘b1’. Although the angular velocity will be the only value
that will be recorded, knowledge of the other values is helpful in understanding the nature of the
dynamics being examined. Using the classic Rayleigh and Prandtl values of 28 and 10
respectively, the following output was produced.
Figure 32: Simulated Angular Velocity of the Chaotic Waterwheel
© Senior Design Team 02021
Page 110 of 184
Figure 33: Time series for ‘a1’
Figure 34: Time series for ‘b1’
Although each time series displays chaotic behavior, and very little structure can be seen
in the output. When these values are plotted against each other, the true structure of the system’s
attractor becomes much more apparent.
Figure 35: 3-D Plot of the Simulated Chaotic Waterwheel System
Figure 35 shows that even though the individual time series appear to be stochastic and
random, there is a definite structure within the system that governs the state variables. After
establishing that there is an inherent structure within the system, the angular velocity was
analyzed for the different inflow rates calculated from the Rayleigh numbers. The following
graph shows that when the Rayleigh number is equal to or less than one, the system will reach a
steady state with zero rotational velocity. All simulations were run with a Prandtl value of ten,
the value primarily utilized by Edward Lorenz.
© Senior Design Team 02021
Page 111 of 184
Figure 36: Simulation of Angular Velocity for Rayleigh number of one
When the Rayleigh number in increased to slightly above one, the inflow rate of the
water into the system will exceed the leakage rate and water begins to collect in the cups. This
will result in the system converging to a steady state condition for which it has a constant angular
velocity. This constant angular velocity conditions can be seen in Figure 37.
Figure 37: Simulation of Chaotic Waterwheel with Rayleigh number of two
© Senior Design Team 02021
Page 112 of 184
With a Rayleigh number greater than 1, the rotation will converge to a constant angular
velocity in either the clockwise or counterclockwise direction. As the Rayleigh number
increases, the amount of stability in the system decreases and the system requires more time to
converge to a steady state condition. When the Rayleigh number is equal to ten, there is a
transient period of oscillations prior to convergence.
Figure 38: Simulation of Angular Velocity with Rayleigh number of ten
After the Rayleigh number exceeds a value of about fourteen, the decrease in stability
results in the onset of chaotic behavior. At a Rayleigh number of fifteen, the system attempts to
converge to a solution about one of the stable angular velocities, but evidently alternates
erratically between the two stable behaviors.
© Senior Design Team 02021
Page 113 of 184
Figure 39: Simulation of Angular Velocity with Rayleigh number of fifteen
As the Rayleigh number is increased further, the chaotic behavior becomes more evident
and easily observable in the simulated time series. At Rayleigh numbers of 20 and 35, it is
evident that chaotic behavior within the system is increased with these larger values.
Figure 40: Simulation with Rayleigh number of twentyfive
Figure 41: Simulation with Rayleigh number of thirty-five
With only a single time series obtained from this system, the method of attractor
reconstruction will need to be employed to observe the structure within the system. The process
of attractor reconstruction requires that the time series be plotted against a time-delayed version
of itself. Using the time series created with a simulation for a Rayleigh value of 28, the
© Senior Design Team 02021
Page 114 of 184
following reconstructed attractor was constructed. When compared to a plot of the angular
velocity against the ‘a1’ value, topological similarities in the structure can be seen.
Figure 42: Reconstructed attractor from
simulated angular velocity
Figure 43: Plot of angular velocity versus ‘a1’
value for simulated data
From these simulations, it was determined that the appropriate inflow and damping rates
can be controlled to produce the desired behavior and that from this behavior it will be possible
to analysis the data and display the structure of the system attractor.
© Senior Design Team 02021
Page 115 of 184
5.9 Chaotic Waterwheel: Rotational Inertia Analysis
To gain a general understanding on how well the equipment will operate, it is necessary
to determine the mass moment of inertia of the rotating assembly. This is done to determine if
the amount of water that will be filling the cups will be enough to move the wheel or if the wheel
will be too heavy and not move as the cups are overflowing.
Because of the circular nature of the rotating assembly, it is very easy to determine the
mass moment of inertia. For a cylinder, the mass moment of inertia is equal to half the mass of
the component multiplied by the radius squared. For a cylindrical shell, the mass moment of
inertia is equal to the mass of the component multiplied by the outside radius squared. For all
the small components that are attached to the plate and wheel, they were treated as point masses
and using the Parallel Axis Theorem, the mass moment of inertia of each of the components was
calculated to be the mass of the component multiplied by the distance from the component to the
center of rotation squared.
Cylinder : I zz
1 2
mr
2
(Equation 32)
Cylindrica l Shell : I zz mr 2
(Equation 33)
Parellel Axis Theorem : I I 0 Ad 2
(Equation 34)
Using Excel, a spreadsheet was created that would calculated the mass moment of inertia
for the rotating assembly given the mass or density and volume of all the components that are
included. The moment of inertia was then used with a basic second order differential equation to
govern the initial dynamics of the rotational assembly.
© Senior Design Team 02021
Page 116 of 184
I * c * F * r * sin( )
(Equation 35)
By setting the damping value, c = 0, we can calculate the rotational acceleration using
Equation 35.
F * r * sin( )
I
(Equation 36)
In this equation, ‘r’ is the radius of the bolt circle for the cup assembly posts, ‘’ is the
angular deviation from the vertical, and ‘I’ is the mass moment of inertia of the rotational
assembly. The force ‘F’ is equal to the density of water multiplied by the acceleration due to
gravity multiplied by the volume of water in the cup. This equation can be used to determine the
cup size by starting with a very small angular displacement.
* g * V * r * sin( )
(Equation 37)
I
Figure 44: Diagram of Waterwheel for Moment Equation
© Senior Design Team 02021
Page 117 of 184
The force ‘F’ is equal to the density of water, ‘’, multiplied by the acceleration due to
gravity, ‘g’, multiplied by the volume of water in the cup, ‘V’. This equation can be used to
determine the cup size from the moment of inertia of the wheel, a very small angular
displacement, and a desired angular acceleration.
V
* I
(Equation 38)
* g * r * sin( )
After collecting all the necessary information to calculate the mass moment of inertia of
the wheel assembly, Equation 37 was used with various cup sizes to observe the resulting
rotational acceleration. The following initial conditions were used: (0) = 1 degree and d/dt(0)
= 0 radians per second. The resulting initial angular accelerations are listed in the table below.
Table 17: Angular Acceleratin for Varoius Cup Sizes
Volume
of
Cup
fl oz
2
4
6
8
10
12
Angular
m³
5.91E-05
1.18E-04
1.77E-04
2.37E-04
2.96E-04
3.55E-04
Acceleration
rad/s²
0.0380
0.0759
0.1139
0.1519
0.1898
0.2278
Tangential Acceleration at
Perimeter
m/s²
in/s²
0.0087
0.3417
0.0174
0.6834
0.0260
1.0251
0.0347
1.3668
0.0434
1.7085
0.0521
2.0502
From the table, we can see that throughout the entire spectrum of cup sizes, the angular
acceleration will not be negligible. By setting the lower limit of the tangential acceleration at the
perimeter of the wheel to one inch per second squared, we eliminate the 2 and 4 ounce cups.
After this has been determined, the upper limit on the cup size will be limited by the size of the
wheel. The cups must not be big enough that they will interfere with each other as the wheel
rotates. Based on the calculations, ten ounce cups were chosen.
© Senior Design Team 02021
Page 118 of 184
5.10 Chaotic Waterwheel: Stress Analysis
After examining the preliminary design for the chaotic waterwheel apparatus, it appears
that the weak points are located where the Plexiglas wheel is attached to the cups and to the
shaft. The rest of the material will be steel or aluminum, both materials being much stronger
than what will be used for the wheel.
There are two critical locations that will be examined to determine the stresses in the
material. The first location is where the cups are attached to the wheel. At this location there
will be a downward force caused by the mass of all the components that are mounted on the
wheel. There will also be a moment created by the weight of the components hanging out off of
the wheel. The second location will be where the wheel is attached to the metal plate welded on
the shaft. At the bolts connecting the two parts, there could also be two different types of
possible failures. The weight of all the components from each of the cup assemblies, as well as
the wheel itself, will be acting down onto the bolts. There will also be a moment created by all
the cup assemblies that are hanging out off of the wheel. The sum of the moments created by
each of these assemblies will be acting on the location where the wheel and plate are bolted
together.
For the individual cup assembly analysis, the first step is to determine the mass of all the
components that are being mounted to the wheel. Using this mass, the corresponding force is
divided by the area of the wheel that is in contact with the bolt that connects with the post. This
can be found by multiplying the thickness of the wheel by the diameter of the bolt where it
passes through the wheel. Figure 45 shows how this thickness and diameter are determined.
This stress can then be compared to the material properties of the Plexiglas material to determine
if failure will occur or what safety factor will exist.
© Senior Design Team 02021
Page 119 of 184
Figure 45: Diagram of Bolt Passing Through Wheel
The second analysis for the individual cup assemblies involves determining just the
weight of the assembly hanging out away from the wheel. The distance from the center of this
mass to the mid-plane of the wheel must also be determined. This distance, d, can be seen in
Figure 46. By multiplying the weight by the distance, the moment created by the cup assembly
can be determined. To determine the stress, a moment equation is used to find the relationship
between the force from the weight of the cups and the resultant force at the location of the
washers. By using a conservative approximation, the moment arm at the washer will be equal to
half the outside radius of the flat washers. The resultant force will be distributed over the area of
one flat washer. By dividing the force by the area, the stress on the wheel is determined. The
calculated stress can then be compared to the material properties for the wheel to determine if
failure will occur or what safety factor will exist.
© Senior Design Team 02021
Page 120 of 184
Figure 46: Diagram Showing Moment Arm for Cup Assembly
At the location on the wheel where it is mounted to the plate, there could be a possible
failure caused by the weight of all the cup assemblies and the weight of the wheel. After
calculating the weight of all these components, it is then divided by the area of the bolts that are
in contact with the wheel. The area of the bolt in contact with the wheel is equal to the thickness
of the wheel multiplied by the diameter of the bolt. Multiplying this area by the number of bolts
will produce the total area. The calculated value of stress acting on the wheel can then be
compared with the material properties for the wheel to determine if failure will occur or what
safety factor will exist.
© Senior Design Team 02021
Page 121 of 184
Figure 47: Diagram of Wheel Setup
A second possible failure could occur due to the moment created by all the components
that are hanging out off of the wheel. By using the weight value previously calculated for the
components of the cup assembly that are out away from the wheel and the moment arm that they
create, it is possible to determine the moment by multiplying the individual value by the number
of cup assemblies that exist. This moment will then need to be divided by the product of the
countering moment arm of the bolt circle and the effective area that experiences the force. For a
bolt circle of four bolts, the worst case would occur when only one bolt/washer set is
experiencing the moment. To calculate the stress under these conditions, a moment balance
equation is used to determine the force acting on the bolt from the moment created by the cup
assemblies. By dividing the moment by the radius of the bolt circle, the resultant force acting at
the bolt can be determined. To calculate the level of stress in the wheel material, the resultant
© Senior Design Team 02021
Page 122 of 184
force is divided by the area of one of the flat washers. This calculated stress can then be used to
determine the safety factor that exists in the design or if failure would occur.
Results of Stress Analysis
The design of the Chaotic Waterwheel does not require any large forces and many of the
components are rather small and made from lightweight materials. Because of this, the stress
levels in the wheel are much less than those that would result in failure. According to the
Efunda.com website, the compressive strength for cast acrylic sheet material is 76 MPa and the
flexure strength is 83 MPa. The following chart shows the maximum stress levels in the wheel
and the corresponding percent of the failure strengths.
Table 18: Stress Analysis Results for Chaotic Waterwheel
Failure
Type
Moment at Cup Assembly
Weight at Cup Assembly
Moment at Mounting Plate
Weight at Mounting Plate
Maximum
Stress
45.11 kPa
40.79 kPa
26.33 kPa
226.76 kPa
Compressive Safety
Factor
1684
1863
2886
335
Flexure Safety
Factor
1840
2035
3152
366
It is easy to see that there is no risk of failure at any of the locations that were examined.
Aluminum and steel are used for the other components. Since their strengths are much greater
than the cast acrylic, there will not be any risk of failure in any other location. Actions could be
taken to optimize the design and reduce the safety factor but any thinner piece of material would
not provide the rigid structure required for the wheel.
© Senior Design Team 02021
Page 123 of 184
5.11 Chaotic Waterwheel: Flow Analysis
This analysis was done to aid in the design process. We used the results to pick the
appropriate submersible pump and related components in our design.
Once we determined the maximum flow rate needed to achieve chaotic behavior in our
waterwheel (Qout), we can solve for the head loss between the pump and the overhead water
chamber. Once we have solved for the total head loss, we can compare this value to the head vs.
flow performance specifications of various pumps and choose the correct one.
The flow rate needed was calculated using the following equations:
P1 P2
(Equation 39)
z1 0
(Equation 40)
V2
g z2
2
(Equation 41)
Q V1 A
(Equation 42)
‘P’ is equal to atmospheric pressure at the inlet, point 2, and the outlet, point1, of the cup.
The value of ‘z2-z1’ equals the maximum water height in the cup. The initial velocity of the
water at the top, ‘V2’, of the cup is assumed to be zero. ‘V1’ is the outlet velocity of the water.
‘A’ is the outlet area of the cup.
The following equations were used to solve for the overall head loss. In these equations,
‘Qout’ will be determined by the flow rate out of the cups of the chaotic waterwheel. These
equations were calculated with Qout = Qin, which is the flow out of the pump.
Re
VD
© Senior Design Team 02021
(Equation 43)
Page 124 of 184
V
Qin
A
(Equation 44)
f
64
Re
(Equation 45)
(for laminar flow)
Notation:
‘V’ is the fluid velocity.
‘A’ is the area of the pipe between the flow chamber and the pump.
‘’ is the density of water.
‘D’ is the inside diameter of the pipe.
‘’ is the dynamic viscosity of water.
‘“Re’ is the Reynolds number. It is a non-dimensional number used in the analysis of
flows.
Using ‘V’ to find the Reynolds number, we can approximate the friction factor, ‘f’, from
a graph of empirical data or if it is laminar it can be calculated using the given formula.
L V2
D 2g
(Equation 46)
H total H loss ( Z 2 Z1 )
(Equation 47)
H loss f
Notation:
‘H’ is head.
‘L’ is the length of the pipe.
‘g’ is acceleration due to gravity.
From this analysis we found that the system required a maximum flow rate of 92 g/h and
a corresponding head requirement of 3.16 ft to achieving chaotic behavior. Using this data we
were able to look at the chart in Appendix J to choose the appropriate pump.
© Senior Design Team 02021
Page 125 of 184
6 Facet 6: Preliminary Design
6.1 Chua’s Circuit
The circuit will be fabricated from the
necessary resistors, capacitors, and inductor. A
variable resistor will be used between the
locations where the voltages are measured.
Varying this resistance value will cause the
circuit to produce different types of nonlinear
behavior. The circuit will be mounted onto a
Figure 48: CAD model of Chua's Circuit Apparatus
base using a set of standoffs. A Plexiglas
cover will be placed above the circuit in a similar fashion to protect its components. Along with
the circuit, a set of speakers will be mounted onto the base. The output from the circuit will be
sent to the speakers as well as the LabView workstation. Sending the signal to the speakers will
allow changes in the dynamics of the system to be easily observed. The base will be raised up by
a set of leveling glides to allow for easy operation and transportation.
© Senior Design Team 02021
Page 126 of 184
6.2 Multi-well Oscillator
In this device, we have designed a
Multi-well Oscillator that can function as
either a Double-well Oscillator or a Triplewell Oscillator. By using electro-magnets
instead of permanent magnets, we can turn
on the central magnet, converting the
Double-well Oscillator into a Triple-well
Oscillator. We also gain the ability to
Figure 49: CAD model of Multi-well Oscillator
Apparatus
control the field strength of each of the magnets. This will allow for considerable ease in tuning
the system to display chaotic behavior as well as allow for design-oriented experimentation. The
base of the apparatus is also designed such that the outside two electro-magnets can be moved
along slots to allow them to be placed at different distances from the beam.
A small electric motor will be used to apply a sinusoidal force to the system. By
attaching a small unbalance mass to the shaft of the motor, we will be able to create a force
defined by the following equation:
F ( m * e) * ²
(Equation 48)
This formula defines the force that will be applied to the system as the eccentricity of the
mass, ‘m*e’, multiplied the forcing frequency squared. By adjusting the angular velocity of the
motor, we will be able to control the amount of force being applied to the system. The motor
will be mounted on a movable assembly so that its position on the horizontal beam can easily be
© Senior Design Team 02021
Page 127 of 184
modified. This is done so that the optimal configuration can be used to produce the best possible
output.
The motor’s speed as well as the electro-magnet’s strength will be controlled by using
potentiometers to vary the voltage that passes through each component. These potentiometers
are connected to a set of dials on a control panel located at the back of apparatus. Underneath
the base will be connectors for the power supply and for the signal created by the strain gage
array.
As measuring the displacement of the tip of the beam presents many difficulties, we have
chose to examine the strain in the beam at a location near where it is fixed to the structure. The
relation between the displacement of the tip of the beam and the measured strain is deduced from
in the following equations. The first equation shows the relationship between stress and strain as
stated by Hooke’s Law.
E
(Equation 49)
In this equation, ‘’ represents the strain, ‘’ is the stress, and ‘E’ is the modulus of
elasticity of the material. It is assumed that the material obeys Hooke’s Law. Equation 50
displays the relationship between normal stress and bending moment.
M
I
c
(Equation 50)
Equation 49 shows that the stress in the beam is dependent on the bending moment acting
on the beam ‘M’, the area moment of inertia of the beam ‘I’, and the distance from the neutral
axis of the beam, ‘c’. To determine the maximum stress in the beam, ‘c’ is defined as half the
thickness in the beam. It is also assumed that the beam under examination is homogenous and
© Senior Design Team 02021
Page 128 of 184
isotropic. The oscillating beam that is being examined is constrained in a cantilever fashion.
The equation for the bending moment in the beam and the maximum deflection at the tip are
defined by the following equations.
M F * (x l)
y max
F * l³
3* E * I
(Equation 51)
(Equation 52)
The equation for the bending moment, ‘M’, in a cantilever beam requires the force ‘F’ at
the end of the beam. The moment is determined for a location a distance ‘x’ from the fixed end
of a beam of length ‘l’. The equation for the deflection at the tip of the beam is also dependent
on the force at the end of the beam, the length of the beam, the modulus of elasticity of the
material and the moment of inertia of the beam. Since the deflection at the tip of the beam is
known, we can solve for the effective force that would cause this deflection. Substituting this
into the previous equation, the bending moment in the beam can be determined given the
deflection at the end of the cantilever beam.
M
3 * ( y max ) * E * I
(x l)
l³
(Equation 53)
This equation for the moment of the beam can be substituted into Equation 50 to show
what the stress is in a cantilever beam will be at location ‘x’ with an end deflection of ‘ymax’.
3 * y max * c * E
(x l)
l³
(Equation 54)
By simply applying Hooke’s Law to this equation, the strain at the surface of the beam at
location ‘x’ can be found for a given end deflection ‘ymax’
3 * y max * c
(x l)
l³
© Senior Design Team 02021
(Equation 55)
Page 129 of 184
By simple observation, it can be seen that at a specific location ‘x’, there is a simple
linear relationship between the deflection at the end of the beam and the strain at a particular
location on the beam. As a result, the data produced from the simulations is comparable to the
data that will be gathered using a strain gage array.
The oscillating beam will be made from a long, slender piece of high gauge steel so that it
will provide magnetic attraction and enough flexibility to respond to the presences of the
magnets behave properly in the presence of the magnets. The beam will be the most dynamic
component in the system and it will also have the strain gage array mounted onto it. For this
reason, the apparatus is designed to allow for ease in removing and replacing the oscillating
beam. The beam is designed using very simple geometry so that fabrication of a replacement
part can be done quickly and easily by anyone with basic machining knowledge.
The main structure of the apparatus will be made from aluminum to reduce any problems
that excessive magnetic material may cause. This is also taken into account with the use of
stainless steel fasteners. The design allows for the apparatus to be assembled, disassembled, or
repaired using only a set of hex keys and a crescent wrench. The final size of the apparatus will
be about eight inches wide, twenty inches long and ten inches tall.
© Senior Design Team 02021
Page 130 of 184
6.2.1 Strain Gage Selection
6.2.1.1 Introduction
The oscillator device requires a method of measuring the motion of the oscillating steel
beam. This can be done by way of displacement sensor (ie. laser beam, etc.), force sensor or by
other means. Our group decided to use a strain gage sensor. Strain gages are inexpensive,
readily available, and produce continuous values that can be interpreted by a data acquisition
device. In addition, the compact strain gages easily attach to the beam, causing less additional
mechanical features to the design of the oscillator.
The strain of a material can be calculated by dividing the stress of the beam by the
material’s modulus of elasticity. Stress at a particular point is dependent upon the beam’s
moment of inertia, the distance of the point from the neutral axis, and the bending moment
caused by the motorized beam and electromagnets. Once the steel beam is analyzed using
Hooke’s law, the output of the strain gages will be compared to validate the measurements and
written analysis.
After consulting Dave Hathaway from the RIT machine laboratory, it was determined
that it would be best for the team to work with Measurements Group sensing devices.
Engineering sales representative, Tom Rummage suggested a variation of the product item
number, CEA-06-250UN-120 (with variations of 125 instead of 250 and 350 in place of 120—an
explanation of these designation numbers/letters is included later on in the report) as a generalpurpose strain gage. When the team determines the exact dimensions of the oscillating beam
and the approximate maximum displacement of the beam, a more specific strain gage may be
determined. This report will focus on the preliminary steps to be taken in selecting a strain gage.
© Senior Design Team 02021
Page 131 of 184
6.2.1.2 Objective
To find a strain gage that is as accurate and reliable as possible given the environmental
and operating conditions placed upon it.
Selecting a Measurements Group Strain Gage
Table 19: Strain Gage Variable Parameters
Gage Parameters
Strain-sensitive alloy
Self-temperature-compensation number
Backing materials (carrier)
Grid resistance
Gage length
Options
Gage pattern
Test Parameters
Accuracy
Test duration
Stability
Cyclic endurance
Temperature
Ease of installation
Elongation
Environment
Measurements Group charts the procedure in choosing a strain gage:
Strain Gage Selection
Figure 50: Strain Gage Selection Diagram
1) gage length, 2) pattern, 3) gage series, 4) options, 5) resistance, 6) S-T-C number
However, before we can start the selection process, the group will decide the configuration of the
strain gages.
© Senior Design Team 02021
Page 132 of 184
6.2.1.3 Configuration:
Firstly, before all other concerns, our group has to determine the configuration of the
strain gages. Because the beam to be observed is undergoing bending force, the sensors will be
arranged in a half bridge or full bridge configuration (the full bridge produces double the output
of the half bridge). See Appendix A for a diagram.
6.2.1.3.1 Gage length:
The generic length for a strain gage is 0.125 inches (or 3 mm). This type will enable us
to be more specific in other areas of constraints. The reason we would chose a longer gage
would be to improve the strain averaging, create improved heat dissipation, and make installation
easier for replacement.
6.2.1.3.2 Pattern:
A UN type pattern offers a general, uniaxial-purpose grid. See Appendix A for a description.
6.2.1.3.3 Gage series:
Carrier Matrix or Backing:
ie: CE
Flexible gages with a cast polyimide backing and encapsulation featuring large,
rugged, copper-coated solder tabs. This construction provides optimum capability for direct
leadwire attachment.
Foil Alloy:
ie: A Alloy
Constantan alloy in self-temperature-compensated form.
© Senior Design Team 02021
Page 133 of 184
6.2.1.3.4 Options:
The CEA type sensor uses a P2 option. See Appendix A for details.
Option P2
Preattached leadwire cables for CEA-Series gages.
6.2.1.3.5 Resistance:
Strain gages are available in resistances ranging from 30 to 5000 ohms. The most
common resistance is 120 or 350 ohms. As with gage length, by using a more common
resistance, the group can more easily chose a sensor with other necessary constraints. The 350ohm gages reduce heat generation.
6.2.1.3.6 S-T-C number:
The Self-Temperature Compensation number is determined by the thermal expansion
coefficient of the material used (in our case, stainless steel). See Appendix A (table 504.1) for
steel’s recommended S-T-C number.
ie: (for stainless steel): A Alloy 00, 03, 05, 06, 09, 13, 15, 18
After careful evaluation of all the selection parameters, it was established that the strain
gages suggested by Mr. Rummage would be able to provide us with means of monitoring the
dynamics of the Multi-well Oscillator. The CEA-06-250UN-120 model will be used with most
of the generic parameters and the pre-attached leadwires.
© Senior Design Team 02021
Page 134 of 184
6.3 Chaotic Waterwheel
The chaotic waterwheel design that was
developed consists of a wheel rotating in a
vertical plane with eight cups attached. Teflon
sleeves will be used between the cups and the
posts mounting on the wheel to reduce the
friction between components. Using a light
synthetic material for the wheel, plastic cups
and only a number of small bolts, washers, and
nuts, the weight of the wheel was kept very
light. The major contributors to the mass
moment of inertia of the rotating system are the
Figure 51: Pro Engineer Model of Chaotic
Waterwheel
shaft and a mounting plate, to attach the wheel to the shaft. The design for these components
requires the use of steel tubing and steel plate. Steel was chosen for the shaft to reduce any
deflection that may result in a misalignment of the wheel.
The steel shaft will then pass through two pillow block bearings to allow for free rotation
of the wheel assembly. Pillow block bearings were chose because they would be easily mounted
on the assembly and provide easy access for any maintenance that is required. With a
considerable amount of luck, a double quadrature encoder was discovered that was designed into
a pillow block bearing. This allowed the device to include one normal pillow block bearing and
the pillow block encoder bearing. The encoder bearing was chosen so that the direction and
angular speed of the wheel could be recorded as a simple digital output. This output will be
© Senior Design Team 02021
Page 135 of 184
collected and easily processed by a LabView workstation. The pillow block bearings, along with
a rotational brake will be mounted onto a plate that will then be attached to a supporting structure
in the back of the apparatus.
The braking assembly is designed so that varying amounts of damping can be applied to
the rotating assembly. This structure will be assembled from steel angle and will serve as a
mounting place for the shaft as well as the flow chamber that will provide water for the inflow of
the system.
This flow chamber, designed using PVC pipe components, will serve as a reservoir above
the top of the wheel. The flow chamber will be connected to a water source, an overflow, pipe to
direct the water out above the wheel, and a drain valve in the base to empty the flow chamber
between uses. The pipe that will direct the water from the flow chamber to the top of the
waterwheel will contain a needle valve to allow for precise, repeatable control of the inflow rate
of the system. The water source will be connected to a small submersible pump located in the
basin at the base of the structure. The basin will be located underneath the wheel to catch all of
the water draining from the cups. It will also be the location of the terminal ends of the tubing
connected to the overflow and the drain valve on the flow chamber.
© Senior Design Team 02021
Page 136 of 184
6.3.1 Angular Velocity Sensor Selection
There were three major requirements of the main sensor for the chaotic waterwheel. The
first of which was that it must be able to measure the angular velocity of the rotating assembly or
through additional calculations be able to be used to determine the angular speed. This could be
done by calculating the derivative given position values or by calculating the integral of an
acceleration values. The second major requirement for the sensor was that it must be able to
distinguish between the directions that the wheel assembly is rotating. There must be a way to
indicate to the data acquisition device whether the wheel assembly is rotating in the clockwise or
counterclockwise direction. The final principal requirement was that the precision of the output
must be high enough to allow for an effective analysis. Without fulfilling the minimal
requirements, a sensor would not be useful to the chaotic waterwheel design.
There were additional characteristics that would be desirable in the sensor if the minimal
requirements were met. Without the exact knowledge of the sensor’s geometry, the method of
mounting the sensor was a concern. Because of this, a sensor that provided an easy means of
mounting would allow for less complexity in the overall design. Other properties that would be
desired in a sensor would include ease of installation, ease in tuning, and an adjustable output. It
would also be to the team’s advantage if the output signal from the sensor is preprocessed and
easily analyzed by a LabView program. Durability and reliability are two other factors that were
considered when choosing a sensor.
The sensor that was selected for the chaotic waterwheel was the IR Torrington Fafnir
Encoder Survivor® unit. These models of sensors are designed into bearing assemblies. With a
choice of flanged units and pillow block bearings, the pillow block bearings were chose to
© Senior Design Team 02021
Page 137 of 184
facilitate a less complicated concept of the overall apparatus. The pillow block encoder bearing,
being of a standard size, can be coupled with a regular bearing to provide all the bearing
requirements for the design of the chaotic waterwheel. The encoder bearings are produced with
two options, a single channel output or a two-channel output. The sensors utilize magnetic
encoder disks and hall sensors to measure the angular speed of the bearing. The magnetic
encoder disks produce 32 pulses per revolution. Using this method, the sensor produces a digital
output in the form of a square wave. The output voltage is dependant on the voltage that is
supplied to the sensor and has a range between 4.5 volts and 28 volts, providing quite a large
array of possible voltage values. The two-channel style uses two magnetic encoder disks
positioned ninety degrees out of phase. This creates output similar to a 32-line digital quadrature
encoder. The angular velocity can easily be measured by determining the frequency of the
square wave and by comparing the two signals and the direction of rotation can be determined as
well. Because of the two outputs are being produced, it is possible to have a resolution of 128
edges per revolution or less than 3° per pulse. This accuracy in conjunction with the capabilities
of the LabView equipment will allow for a high level of precision in the recorded data. This
sensor also does not require any calibration as it is already configured within the bearing casing.
The casing is made of a strong synthetic material and has a very durable design. It has be
subjected to a number of tests by the manufacturer including thermal shock, thermal cycle,
highly accelerated life tests, vibration, outdoor testing, and a more than 12 months on various
customers’ sites.
This sensor was able to meet all the major requirements that were placed on it. It was
also able to meet most of the additional requirements that were placed on the sensor. Because
the sensor is built into a bearing block, the design of the apparatus no longer requires two
© Senior Design Team 02021
Page 138 of 184
bearings, reducing the overall estimated cost. Mounted along side a regular pillow block
bearing, this encoder bearing will give the shaft the support that it requires while at the same
time, recording the direction and magnitude of the angular velocity. The discovery of the
encoder has greatly benefited the design of the chaotic waterwheel assembly.
© Senior Design Team 02021
Page 139 of 184
7 Conclusion
Our team developed three preliminary concepts using the first six steps within the twelvestep design process presented within the senior design class. Starting with a needs assessment,
we developed conceptual models. A feasibility assessment eliminated one candidate design
concept from the pool of possible apparatuses. This left us with three concepts to pursue:
Chua’s circuit, a multi-well oscillator, and a chaotic waterwheel. Our team prepared a list of
design objectives for each and in turn, created a performance specification table. The results of
the analyses conducted on each device concept were continuously synthesized into an improved
model concept.
Chua’s circuit is a non-linear electric circuit. Starting with a simple circuit containing an
inductor, capacitors and resistors, Chua’s diode is added causing nonlinear behavior. Its theory
equations are based upon Kirchoff’s current law. PSpice software simulated the nonlinear
character of the circuit by tracking the voltage or current against time. The simulations produced
waveforms that were then transferred to Matlab for further analysis. Through experimentation of
different resister values, the circuit was able to produce chaotic behavior. This was seen through
the 2-D plot of two voltage measurements taken simultaneously at different points on the circuit
versus time. A 3-D rendition was also plotted using the two voltage values and adding the
current through the inductor. Because part of the circuit’s concept is to aurally observe the
chaotic behavior of the circuit, a Fourier analysis was performed. Since the resulting frequency
is within the audible range, it will be possible to hear the output from the circuit.
The multi-well oscillator we plan to create is a magneto-elastic mechanical system. A
thin, steel beam fixes perpendicularly to an oscillating beam. As the thin dangling beam moves
back and forth, its movement is further manipulated by two or three electromagnets positioned
© Senior Design Team 02021
Page 140 of 184
on a baseboard located beneath the unfixed end of the thin beam. As the thin beam undergoes an
increased sinusoidal force by the oscillating beam’s attached motor, the thin beam will exhibit
erratic-like movement between the two or three electromagnets. This is called transient chaos
and is a characteristic of some nonlinear system. Matlab simulated a double-well oscillating
system. By fixing the dampening ratio and forcing frequency, then changing the forcing
amplitude, the theoretical movement of the thin beam was observed through the plot of
displacement versus time. A plot of velocity versus displacement sampled with the forcing
frequency will create a Poincaré map and display the fine structure within the attractor of the
chaotic nonlinear system. Beam stress and deflection, beam frequency, and fatigue-failure were
also analyzed to insure a stable model with a reasonable lifespan.
The waterwheel was designed to display the Lorenz equations. A wheel with evenly
spaced cups mounted on it rotates as water is added to the cups. A hole in each cup allows the
water to leak out and return to the basin at the bottom of the apparatus. When the water input
equals the water leakage, no movement happens. If the water input is slightly higher than the
water leakage, the wheel converges to a steady angular rotation. The waterwheel will exhibit
chaotic behavior if the water input is increasingly higher than the water leakage by rotating in an
erratic fashion. The Chaotic Waterwheel apparatus will use an encoder bearing to sense the
angular speed and direction of the wheel. By simulating the angular velocity by time with
Matlab, the hypothesis of a chaotic waterwheel was affirmed. Three analyses were conducted to
aid in the design of this device. A flow analysis was performed to determine the design
parameters that revolved around the fluid subsystem of the apparatus. A simple stress analysis
was conducted to verify the strength of the components in the design. The moment of inertia of
© Senior Design Team 02021
Page 141 of 184
the wheel assembly was also calculated to determine if verify that the wheel would function
properly.
As soon as the team conducted sufficient engineering analysis, CAD models were
developed and from them component and assembly drawings were created. With a preliminary
design developing, a bill of materials for each device was formed. Because each of the three
apparatuses shared common package items such as nuts, washers, bolts, the team was able to
save money when consolidating the bills of materials. The budget required the team develop the
equipment while spending less than two thousand dollars. The finalized balance for the
preliminary designs leaves the team with over one hundred dollars. The design team is on
schedule and has mapped out next quarter’s schedule toward the completion of the project. We
plan to start next quarter off working hard with strong ambition.
© Senior Design Team 02021
Page 142 of 184
7.1 Budget
The total amount of funding set forth for this project by the Mechanical Engineering
Department at R•I•T was two thousand dollars. This sum was to cover all expenses for raw
materials, electrical components, sensors, other purchased components and any processes
required. As each of the three concepts was developed, a bill of materials was created including
the components number, the name of the item, a brief description of the item, the material type,
the vendor, the vendor’s number, the purchase cost and the purchase quantity.
After completing one for each of the three devices, the three bills of materials were
combined and all the common components were combined into one record within the combined
bill of materials. This allow for a better representation of the cost of the project. It is also for
this reason that the sum of the cost of the devices is greater than the total cost of the set. In some
cases, one package of a component would satisfy the needs of all three of the designs. In the bill
of materials for each separate device, a package of the components was called out, implying that
three would be required for the complete set. By fabricating all three of the devices in the set at
the same time, it is possible to reduce the cost.
Table 20: Preliminary Cost Values for Each Device and Complete Set
Device
Chua’s Circuit
Multi-well Oscillator
Chaotic Waterwheel
Total
Cost
$267.71
$597.01
$1135.81
$1895.29
Once the bill of material was completed for the entire set, the components were grouped
by their vendor to better facilitate the completion of the purchase requisitions. This information
© Senior Design Team 02021
Page 143 of 184
allows us to determine what purchase requisition procedures will be required for the particular
vender. The purchases will be a combination of petty cash and procurement card purchases. The
expenses associated with the different vendors can be seen in the table below.
Table 21: Vender Distribution of Components and Expenses
Vendor
Digikey
Lowes
Magnetics.com
McMaster Carr
Measurements Group
Metal Supermarket
MetalMart.com
Radio Shack
Rio
Torrington
Walmart
Total
Components
61
36
3
568
2
1
49
2
1
1
12
741
Expenses
$236.07
$43.36
$166.65
$633.54
$32.00
$40.00
$325.46
$16.98
$14.89
$375.00
$11.34
$1895.29
The materials contained in the expenses listed above will allow the design team to
successfully realize the concepts that were developed this quarter. Combined with the labor of
the design team and guidance from our faculty mentors, we will be able fabricate, assembly and
test the complete set of devices that have been designed.
© Senior Design Team 02021
Page 144 of 184
7.2 Plan
The first action that will be taken in the spring quarter will be to collect all the
components and materials required to fabricate and assemble each of the apparatuses. This will
be facilitated by the submission of all the required purchase requisitions before the end of the
winter quarter. All the required materials, sensors, and hardware will be ordered from its
respective vendor. The components that can be acquired locally will be purchased following the
established procedure for petty cash purchases. As most of the venders have short lead times, all
the materials should be collected by the beginning of the spring quarter.
The next action will be to begin fabricating components and making any modifications
required for the purchased components. The mechanical aspect of this will be done in the
mechanical engineering machine shop located in the Kate Gleason College of Engineering. Due
to the nature of some of the components, experimentation may be required before final
dimensions can be established. The electrical components requiring fabrication or assembly will
be done in the electrical engineering laboratories on the third floor of the Kate Gleason College
of Engineering. Experimentation will also be required during the fabrication process of the
electrical subsystems because of the sensitive nature of the circuit. The tolerance values of the
components will be very important. After the mechanical components have been fabricated and
assembled, the electrical subsystems will be integrated into each of the devices. At this point in
the fabrication process, it is anticipated that time will be required for tuning to optimize the
system integration.
While the three apparatuses are being fabricated and assembled, it will be necessary for a
member or members of the team to become familiar with the LabView data acquisition systems
© Senior Design Team 02021
Page 145 of 184
and programming with the LabView software. Once the team has become familiar with
LabView, programs can be created to acquire data from each of the systems and data analysis
methods can be implemented. With the knowledge of the type of data that will be produced by
each of the sensors, simple diagnostics programs can be written to tests each of the sensor before
they are even attached to the assembly. This way, the condition of the sensors can be determined
early and if necessary, actions can be taken to replace the sensors before they are required for the
assembly of the devices. After the devices have been assembled and the testing process has
begun, further work will be done to optimize the LabView setup and programs.
Another action, which will be taken prior to the completion of the assembly process, is to
create testing procedures for each of the devices. After determining what general material will
be covered in the laboratory experiments for each of the devices, testing procedures will be
created to determine the critical parameters required to attain the different types of nonlinear
behavior. Along with the testing procedure, data sheets will be created so that all the conditions
of each test will be recorded as well as the control parameter values and the results of the test.
All recorded data will be preserved in an archive to aid in validating the equipment.
With all the listed processes have been complete, each of the devices will be tested
extensively. This will allow the team to validate the designs, make any adjustments that may be
necessary, determine the critical parameters to be used in the laboratory procedures, and evolve
the LabView program so that it contains all the required functions. The testing process will also
provide the team will a large amount of data that can be used to study each of the systems and
determine the reliability of the devices.
After the bulk of the quarter has been spent testing the equipment, the laboratory
experiment procedures will be created and the final versions of the LabView programs will be
© Senior Design Team 02021
Page 146 of 184
created. The format that will be used for the laboratory procedures can be seen on the following
page. Upon completion of the testing, the team will begin to compile the final design report.
This report will discuss the fabrication and assembly process, the work done with LabView,
design and implementation of the testing procedures as well as summarized documentation of the
results from all the testing. This information will also be used in the creation of a final design
review presentation.
© Senior Design Team 02021
Page 147 of 184
ROCHESTER INSTITUTE OF TECHNOLOGY
Department of Mechanical Engineering
Rochester, NY
Course Number and Name
Laboratory Experiment: #
Name of Lab
Objective
This section of the lab will describe the purpose of the lab and also provide a brief
introduction to the laboratory procedure and theory that will be covered.
Background
This section will provide students with the theoretical background of the experiment. It
will review the material that was covered in class and relate this material to the laboratory
experiment that is to be performed.
Prelab
This section can be used to ask students to do some calculations or design prior to
performing the experiment. This may include performing simulations, performing an analysis on
the systems governing equations, or calculating the required parameters to produce the desired
dynamics.
Experiment
This section includes a step-by-step procedure to perform the lab. Students will be given
information on how to use the lab equipment properly and how to use the data acquisition
equipment.
Analysis
This lab section will instruct the students on how to analyze the data they have gathered
from the experiment. This will include step-by-step instructions with the LabView program that
was created to accompany the experiment. Students may be able to transfer their data to a disk
and then perform further analysis in Excel or Matlab.
Questions:
Questions pertaining to the experiment can be asked here.
© Senior Design Team 02021
Page 148 of 184
7.3 Schedule
The schedule for the spring quarter was created using MS Project. All the different tasks
that will need to be completed next quarter were entered and then the estimated length of time
required for the completion of each task was entered. After the starting date was set to March
10th for the first set of tasks, the remaining tasks were assigned predecessors. This indicated that
a given task could not be started until its predecessor had been completed. Using this and the
Gantt chart created by MS Project, a tentative schedule for the ten weeks of spring quarter was
created. While the time of day listed for start and finish by MS Project do not provide an
accurate approximation of exactly when and how long the team will be working each day, the
dates and duration information will be followed.
© Senior Design Team 02021
Page 149 of 184
Table 22: Senior Design Project Schedule for Spring Quarter
ID
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
Name
Duration Start
Finish
Predecessors
2.d
Mechanical Component Experimentation
3/10/2003 8:00 3/11/2003 17:00
8.d
1
Mechanical Component Fabrication
3/12/2003 8:00 3/21/2003 17:00
5.d
2
Mechanical Component Assembly
3/24/2003 8:00 3/28/2003 17:00
2.d
3
Mechanical Assembly Tuning
3/31/2003 8:00 4/1/2003 17:00
2.d
Electrical Component Experimentation
3/10/2003 8:00 3/11/2003 17:00
8.d
5
Electrical Component Fabrication
3/12/2003 8:00 3/21/2003 17:00
5.d
6
Electrical Component Assembly
3/24/2003 8:00 3/28/2003 17:00
2.d
7
Electrical Assembly Tuning
3/31/2003 8:00 4/1/2003 17:00
1.d
14
Testing Sensors
3/20/2003 8:00 3/20/2003 17:00
2.d
4,8
Mechanical/Electrical Subsystem Integration
4/2/2003 8:00 4/3/2003 17:00
1.d
10,9
Mechanical/Electrical Subsystem Tuning
4/4/2003 8:00 4/4/2003 17:00
1.d
LabView Education
3/14/2003 8:00 3/14/2003 17:00
2.d
12
LabView System Setup
3/17/2003 8:00 3/18/2003 17:00
3.d
12
LabView Diagnostic Program
3/17/2003 8:00 3/19/2003 17:00
5.d
14
LabView Data Acquisition Program v1
3/20/2003 8:00 3/26/2003 17:00
2.d
Experiment Theory: General
3/10/2003 8:00 3/11/2003 17:00
3.d
16
Testing Procedure Design
3/12/2003 8:00 3/14/2003 17:00
5.d
17
Testing Data Sheet Design
3/17/2003 8:00 3/21/2003 17:00
20.d
18,15,11
Testing of Equipment
4/7/2003 8:00 5/2/2003 17:00
20.d
Design Tuning and Adjustment
4/7/2003 8:00 5/2/2003 17:00 18,15,11
20.d
Establishing Critical Parameters
4/7/2003 8:00 5/2/2003 17:00 18,15,11
20.d
Evolution of LabView Program
4/7/2003 8:00 5/2/2003 17:00 18,15,11
5.d
Final Report
5/5/2003 8:00 5/9/2003 17:00 19,20,21,22
5.d
23
Final Presentation
5/12/2003 8:00 5/16/2003 17:00
Using the MS Project software, the table on the above page can be visualized as shown in
Figure 52. This image provides easier means to view the flow of the project. This also enables
the critical path to be determined. In this schedule, the critical path consists of the fabrication
and assembly tasks followed by the testing tasks and finally the creation of the report and
presentation.
© Senior Design Team 02021
Page 150 of 184
Figure 52: Gantt chart of Schedule for Spring Quarter
Through following this schedule, the team will be able to complete this project on time
and have adequate time to prepare the final report and presentation. With the aid of MS Project,
any deviation for the schedule can be recorded and the necessary corrections can be determined.
In the event that one tasks requires more time than what was initially estimated, we will alter the
schedule to increase the resources of another task. With more resources, most likely in the form
of team members, the task will be completed in less time and the team will be able to maintain
the length of the critical path and still complete the project on time.
© Senior Design Team 02021
Page 151 of 184
Resources
Text Books:
Fox, Robert W. and McDonald, Alan T. Introduction to Fluid Mechanics. John Wiley & Sons,
Inc.: New York, New York, 1998.
Giesecke, Frederick E. et al. Engineering Graphics. Macmillan Publishing Company: New York,
New York, 1993.
Moon, Francis C. Chaotic and Fractal Dynamics. John Wiley & Sons, Inc.: New York, New
York, 1992.
Shigley, Joseph E. and Mischke, Charles R. Mechanical Engineering Design. McGraw-Hill, Inc.
:New York, New York, 1989.
Strogatz, Steven H. Nonlinear Dynamics and Chaos. Perseus Publishing: Cambridge,
Massachusetts, 1996.
Thomas, William T. and Dahleh, Marie Dillon. Theory of Vibrations with Applications.
Prentice-Hall, Inc.: Upper Saddle River, New Jersey, 1998.
Websites:
A Lab Based Course in Nonlinear Dynamics Student Projects. California Polytechnic State
University, February 20, 2003, <http://prisma.foe.calpoly.edu/nonlin/nlsp.html>
Aluminum 2024-T4;2024-T351. MatWeb, February 20, 2003
<http://www.matweb.com/search/SpecificMaterial.asp?bassnum=MA2244>
Aquarium Pumps. Rio Pumps, February 20, 2003,
<http://www.riopump.com/pages/aquapump.html>
The Chaos Concept. University of Bath, February 20, 2003,
<http://www.bath.ac.uk/~ma0kb/applications.html>
Chaos Theory. Colgate University, February 20, 2003,
<http://kendrick.colgate.edu/mboothe/chaos/section4.htm>
Chaotic Water Wheel. Georgia Institute of Technology, February 20, 2003,
<http://www.prism.gatech.edu/~gtg638a/Diffeq/project.html>
The Chaotic Waterwheel. Institute of Computer Graphics and Algorithms, February 20, 2003
<http://www.cg.tuwien.ac.at/~fischel/Lorenz97/index.html>
The Chaotic Waterwheel. Royal Netherlands Meteorological Institute, February 20, 2003
<http://www.knmi.nl/~schrier/waterwheel.html>
© Senior Design Team 02021
Page 152 of 184
Chua’s Circuit. The Australian National University, February 20, 2003,
<http://spigot.anu.edu.au/courses/engn2211/doc/chua.html>
Chua’s Circuit. California Institute of Technology, February 20, 2003,
<http://www.cmp.caltech.edu/~mcc/chaos_new/Chua.html>
Davis, Wm. Rhett. About My Research. February 20, 2003,
<http://bwrc.eecs.berkeley.edu/People/Grad_Students/wrdavis/chaos/research.html>
Double-well Oscillator. University of Western Ontario, February 20, 2003,
<http://www.apmaths.uwo.ca/~bfraser/chaos/doublewell/>
Double-well Oscillator. ENSHEEIHT, France, February 20, 2003,
<http://www.enseeiht.fr/hmf/travaux/CD9900/travaux/optmfn/hi/00pa/mfn05/hydro.htm>
eFunda.com Main Page. eFunda, February 20, 2003 <http://www.efunda.com>
Engineering DesignPlanner™ Main Page. DesignPlanner™, February 20, 2003
<http://www.designserver.rit.edu>
Interactive guide to strain measurement technology. Vishlay, February 20, 2003,
<http://www.vishay.com/brands/measurements_group/guide/guide.htm>
The Lorenz Equations. University of Western Ontario, February 20, 2003
<http://www.apmaths.uwo.ca/~bfraser/version1/lorenzintro.html>
Maxijet. Premium Aquatics, February 20, 2003,
<http://www.premiumaquatics.com/thestore/Maxijet.html>
McMaster-Carr Main Page. McMaster-Carr, February 20, 2003 <http://www.mcmaster.com>
MetalMart.com Main Page. MetalMart.com, February 20, 2003 <http://www.metalmart.com>
Nonlinear Circuits and Systems Research. Hong Kong Polytechnic University, February 20,
2003, <http://chaos.eie.polyu.edu.hk/NSR-project.html>
Small Submersible Pumps. Stoney Creek Equipment, Co. February 20, 2003,
<http://www.stoneycreekequip.com/form/pumps1.htm>
Waterwheel Lab. Paul Scherrer Institut, February 20, 2003
<http://people.web.psi.ch/gassmann/waterwheel/WaterwheelLab.html>
Wu, Chai Wah. Introduction to chaotic phenomena in chua’s circuit, February 20, 2003,
<http://www.geocities.com/chaiwahwu/chaosintro/chua_ckt.html>
© Senior Design Team 02021
Page 153 of 184
Appendix A – Strain Gage Information
1) Configuration of Strain Gages:
Bending Beam - Full Bridge
Bending Beam - Half Bridge
CEA-Series Gages (250UN)
Exposed solder tab area 0.08 x 0.05 in (2.0 x
1.1 mm).
© Senior Design Team 02021
Option P2
Preattached Leadwire Cables
Page 154 of 184
Excerpts of Table 504.1 from Vishay web site
Thermal Expansion Coefficients of Engineering Materials
Material Description
Expansion Coefficients **
Recommended
S-T-C
Steel, Carbon, 1008,1018
6.7 ppm/° F,(12.1 ppm/° C)
6
Steel, Stainless, Age
Hardenable (17-4PH)
6.0 ppm/° F,(10.8 ppm/° C)
6
Steel, Stainless, Age
Hardenable (17-7PH)
5.7 ppm/° F,(10.3 ppm/° C)
6
Steel, Stainless, Age
Hardenable (PH15-7Mo)
5.0 ppm/° F, (9.0 ppm/° C)
5
Steel, Stainless, Austenitic
(304*)
9.6 ppm/° F, (17.3 ppm/° C)
9
Steel, Stainless, Austenitic
(310)
8.0 ppm/° F, (14.4 ppm/° C)
9
Steel, Stainless, Austenitic
(316)
8.9 ppm/° F, (16.0 ppm/° C)
9
Steel, Stainless, Ferritic (410) 5.5 ppm/° F, (9.9 ppm/° C)
5
Cast Iron, Gray
6
6.0 ppm/° F,(10.8 ppm/° C)
All information gathered was collected from a telephone conversation with Tom Rummage (919365-3800 Tom.Rummage@measurementsgroup.com) and through website address:
www.VishayMeasurementsgroup.com. All information was gathered on January 29, 2003.
© Senior Design Team 02021
Page 155 of 184
Appendix B – Encoder Bearing Information
Information gathered from the web site of The Torrington Company located at
www.torrington.com. The data was collected on January 15th and was confirmed on February
15th, 2003.
Fafnir Encoder SURVIVOR® Units With Speed & Direction Sensors
YAK 1 PT, YAS 1 PT, YCJ 1 PT, YCJT 1 PT & EU1 OR EU2
Features
• Sealed, Relubricatable, Set Screw pillow
block or 4 bolt flange unit
• -20°C to +85°C Operating Range (-5F to
+185F)
• Single (EU1) or dual channel (EU2)
• up to 32 cycles / Rev, Direction Sensing
• 2 Quadrature Signals - 128 Edges/Rev.
(EU2)
• Zero Speed Sensing
• Digital Output Signals
• Wide Supply Voltage 4.5V to 28V
YAK 1PT EU2
Benefits
•
•
•
•
•
Zero Speed Sensing
Small size & weight
Ease of installation
No adjustments
No auxiliary brackets or couplings
Typical Application
Description
The EU1 and EU2 series of encoder bearings are designed to measure the speed or position of
rotating shafts while providing all the function of a standard housed unit bearing. The EU1
version has a single channel output which can provide from 1 to 32 pulses per revolution. The
EU2 has a two channel output similar to a 32 line digital quadrature encoder. Single or dual hall
sensors and a magnetic encoder disk transmit a digital signal which can be used by most
tachometers, controllers, or PLCs.
Machine designers now have the flexibility to design or retrofit machines with a robust bearing
that eleminates the need for an extra gear tooth sensor or rotary pulse generator. Extra brackets
and couplings are eliminated, the air gap can't go out of adjustment, and installation problems are
eliminated. These sensors are built into Fafnir's industry leading SURVIVOR® PT Series housed
units, and can be steam cleaned, washed down, and exposed to dirty environments.
© Senior Design Team 02021
Page 156 of 184
Applications
•
•
•
•
Machine Speed Control
Conveyors and Gearboxes
Overhead Doors
General Purpose Motion Control
Ratings
• Operating Temperature -20°C to +85°C Operating Range
continuous (-5F to +185F) and 105°C peak (220F)
• Supply Voltage 4.5V to 28V, 20mA
• Period Accuracy +/-5%
• 2 Channel Quadrature Accuracy +/-55°
• Connector: TURCK WS 4.6T-1 (mates with user supplied TURCK FK 4.6 - 0.5 EUROFAST.
• EMC Protected
Features
• Sealed, relubricatable setscrew housed unit
• Polymer pillow block, two or four-bolt flanged unit
• Premium ball bearing insert with Fafnir TDC® coating
• -20°C to +85°C operating range
• Single (EU1) or dual channel (EU2) models
• Up to 32 cycles/Rev, direction sensing (in EU2 model)
• 2 quadrature signals - 128 edges/Rev. (EU2)
• Zero speed sensing
• Digital output signals
• Wide supply voltage 4.5V to 28V
© Senior Design Team 02021
Page 157 of 184
How It Works
Fafnir encoder SURVIVOR® units work on the principle of the Hall Effect. Hall sensors are
solid state devices that, when powered, provide an output signal that is proportional to the
strength of a nearby magnetic field. A magnetic pulser ring with alternating north and south
poles is placed near the Hall element. When the ring spins, the Hall sensor provides an output
signal that can be used to determine the speed and position of the ring. Integrating the pulser
ring and the sensor within a Fafnir housed unit creates a tough, reliable, compact and
maintenance-free sensing unit.
Mounted on the Fafnir bearing inner race, the steel pulser ring is overmolded with an
elastomeric material that has embedded magnetic ferrite particles. This ring has been
magnetized to provide a number of precise north and south poles. A single or dual Hall Effect
sensor, mounted inside the bearing seal with tight control over the air gap, brings the signal out
to a waterproof, industrial grade "green box" enclosure. A small circuit board inside the box
converts the Hall signals from analog to digital form, and also provides filters to protect the
signals from electrical interference. A single Hall sensor generates a single digital output. A dual
sensor produces two signals in quadrature, allowing double the resolution and the ability to
detect direction of rotation.
The electrical signal produced is identical to that supplied by digital gear-tooth sensors, which
are widely used in industry to measure shaft position or speed. The square wave can then be
interpreted by an external counter, tachometer or programmable logic controller (PLC). Widely
available from a number of manufacturers, these units can provide a position and speed reading,
or can perform a control function (see application notes).
Theory Of Operation
© Senior Design Team 02021
Page 158 of 184
Small Hall effect elements, safely positioned inside the bearing cavity, read a tough elastomer
ring magnet. The analog signal, protected with EMC circuitry, is digitized and available for user
supplied counters, tachometers, or PLCs.
A Note On Quadrature Signals:
The EU2 model encoder unit produces two channels of output known as a quadrature output,
represented the figure below. Each channel's signal is a pulse train whose cycle length, (period),
is related to the speed of the bearing. However, each pulse represents a fixed angular
displacement. The signal from Channel B is shifted 90 degrees with respect to channel A. These
three signal characteristics represent the information provided by a quadrature output.
Measuring the frequency, or rate, of the pulses provides the velocity of displacement, or speed.
One way to measure this frequency is to count pulse edges over a fixed time interval. The
encoder unit's pulses represent a fixed angular distance; therefore, by simply counting the
number of pulses, the relative position or distance traveled by the bearing can be calculated.
Angular displacement is simply 360 degrees divided by the bearing resolution.
One advantage of a quadrature signal is that the resolution can be multiplied by 2 or 4 by
XORing the two channels A and B together and counting rising or falling edges or both, thereby
increasing the accuracy of the measurement distance traveled. Finally, by comparing the phase
relationship between channels A and B the direction of rotation can be found. For example,
when A leads B the rotation is Counter-Clockwise, and when A lags B the rotation is Clockwise.
One way to determine which of these condition exists is to check the state of signal B when
signal A goes high. If channel B is at the high, or '1' state, when signal A transitions high, the
rotation is CW, and if channel B's state is low, or '0' state, the rotation is CCW. This can be seen
in the diagram below, figure 1. Note that some industrial counters and controllers can be
programmed to interpret these quadrature signals to provide count up/count down and direction
of rotation readouts.
© Senior Design Team 02021
Page 159 of 184
Reliability Testing
Fafnir encoder SURVIVOR® units (both EU1 and EU2 Series) have
passed rigorous reliability testing to confirm reliable performance
under expected operating conditions.
• 30 units pass thermal shock: -5°F (-20°C) to 220°F (105°C)
• 30 units pass thermal cycle: -5°F (-20°C) to 220°F (105°C)
(ramp rate > 6.5°F (3.5°C)/minute)
• Highly Accelerated Life Tests (HALT): 3 units pass
temperature: -110°F (-80°C) OK; cable melt @ 265°F (130°C),
beyond specification
max. vibration: 38G RMS @ table; 58G peak on bearing
•
•
•
•
•
"shake & bake": -110°F (-80°C) to 265°F (130°C) @ 80°F
(45°C)/min. rate, with vibration: no signal loss
5 units pass steam cleaning tests (80 PSI, point blank)
long term durability: 5 prototypes beyond 4000 hrs.
outdoor Alpha test: production unit beyond 9 months
customer sites: more than 12 months field experience
EMC testing at off-site accredited facility
© Senior Design Team 02021
Page 160 of 184
Price and Availability
Effective September 1999
Single Channel Model EU1
YAK 1 PT EU1
$250
YAS 1 PT EU1
""
YCJ 1 PT EU1
""
YCJT 1 PT EU1
""
Dual Channel Model EU2
YAK 1 PT EU2
$375
YAS 1 PT EU2
""
YCJ 1 PT EU2
""
YCJT 1 PT EU2
""
Please call for volume discounts or e-mail us.
Warranty:
The Fafnir Encoder SURVIVOR® Unit is designed to be tough enough for even the most
demanding industrial applications. Torrington will replace, free of charge, within one year from
date of sale, any encoder SURVIVOR® unit which in its judgement has failed because of
defective material or workmanship, provided it has been shown to have been properly mounted,
adequately lubricated, and not subjected to abuse in operation or assembling. Such bearings must
be returned to the factory, charges prepaid, and with complete information as to service.
Torrington assumes no responsibility for contingent or consequential damage in any event.
Torrington makes no other warranty or representation of any kind whatsoever, expressed or
implied, except that of title and all implied warranties including any warranty of merchantability
and fitness for a particular purpose are hereby disclaimed.
Availability:
Both the single-channel EU1 and dual-channel EU2 are available today in the 1-in. and 25mm
shaft sizes in limited quantities.
Please contact us for additional information regarding availability in other shaft sizes or
configurations.
© Senior Design Team 02021
Page 161 of 184
Appendix C – Chua’s Circuit Supplementary Information
Figure 53: Chua's Circuit, Version A
Figure 54: Chua's Circuit, Version B
© Senior Design Team 02021
Page 162 of 184
Appendix D – Multi-well Oscillator Stress/Deflection Analysis
Spread Sheets
Beam Dimensions
l
w
h
a
13.5
0.375
2
Material Properties
E_Al
p_AL
p_steel
10000000
0.0975
0.284
Wmotor rmass
W (rad/s)
3000
0.3 314.1593
10
Calculated Quantities
I
F
yl
Fdesired
0.008789 88.06827 -0.50936 -86.4498
a
Offset Mass Dimensions
D
h
V
m
0.285
0.25 0.015948 0.002974394
sigma
tau
sigma_I Sy
18787.9 352.2731 18791.2
nd
47100 2.506493
yl
1 0.006597
1.5 0.014655
2 0.025719
2.5 0.039663
3 0.056364
3.5 0.075694
4 0.09753
4.5 0.121746
5 0.148216
5.5 0.176815
6 0.207418
6.5 0.239901
7 0.274136
7.5
0.31
8 0.347367
8.5 0.386112
9 0.426109
9.5 0.467234
10 0.509361
© Senior Design Team 02021
Page 163 of 184
Appendix E – Multi-well Oscillator Frequency Analysis
Spread Sheets
System Frequency Analysis
Effective Mass of Cantilever Beam
0.235714 of mass of beam
Horizontal Beam
Overall Length
Mounted Length
Mount to Motor
Motor to Bracket
Bracket to End
Width
Height
Density
Modulus of Elasticity
Volume
Mass
0.3048 m
12 inches
0.0127 m
0.5 inches
0.098013 m
3.858777 inches
0.181387 m
7.141223 inches
0.0127 m
0.5 inches
0.009525 m
0.375 inches
0.0508 m
2 inches
2700 kg/m³
75 GPa
0.000147 m³
0.398206 kg
Inertia
1.46E-08 m4
Motor Assembly
Mass, guide
Mass, plate
Mass, motor
Mass, unbalance mass
Mass, set screw
Mass, bolt
Mass, lock washer
Mass, flat washer
Mass, mounting screws
0.05 kg
0.025 kg
0.5 kg
0.01 kg
0.001 kg
0.001 kg
0.001 kg
0.001 kg
0.001 kg
Total Mass
0.595 kg
Mounting Assembly
Bracket
Width
Positive Volume
Negative Volume
Volume
Density
Mass
Mass, bolt
Mass, flat washer
Total Mass
© Senior Design Team 02021
1 count
1 count
1 count
1 count
2 count
2 count
2 count
2 count
2 count
0.0254 m
1 inch
1.23E-05 m³
0.75 inch³
3.33E-06 m³
0.203343 inch³
8.96E-06 m³
2700 kg/m³
0.024187 kg
0.001 kg
4 count
0.001 kg
4 count
0.032187 kg
Page 164 of 184
Vertical Beam
Overall Length
Mounted Length
Active Length
Width
Thickness
Density
Modulus of Elasticity
Volume
Mass
0.2667 m
0.0127 m
0.254 m
0.0254 m
0.000607 m
2700 kg/m³
200 GPa
4.11E-06 m³
0.011103 kg
10.5 inches
0.5 inches
10 inches
1 inches
0.0239 inches
1.89E-12 m4
Inertia
Effective Mass
Effective Stiffness
Undamped Natural Frequency
m1
0.641775 Kg k1
3496790 N/m omega1
2334.229 rad/s
m2
0.101254 Kg k2
5.52E+05 N/m omega2
2334.229 rad/s
m3
0.002493 Kg k3
69.35175 N/m omega3
166.8032 rad/s
© Senior Design Team 02021
Page 165 of 184
Appendix F – Multi-well Oscillator Fatigue-Failure Analysis
Spread Sheet
Endurance Limit Analysis
1018 Steel - Cold Drawn
Mean
Tensile
Stress =
64.00 kpsi
Endurance Limit of Test Specimen
Se' =
32.26 kpsi
Surface Factor, ka
ka = a*Sutb
Machined or Cold Drawn
ka =
0.7972
b=
-0.265
kb = (d/0.3)-0.1133
kb =
1.1044
de = 0.808(h*b)½
de = 0.124914
b=
0.0239
a=
2.40
Size Factor, kb
h=
1
kc =
1.00
kd =
1.00 Room Temperature
ke =
1.00 No Miscellaneous Effect
Load Factor, kc
bending
Temperature Factor, kd
Miscellaneous Factor, ke
Endurance Limit of Machine Element
Se = ka*kb*kc*kd*ke*Se'
Se =
© Senior Design Team 02021
28.40 kpsi
Page 166 of 184
Stress Analysis on a Cantilever Beam as a function of Deflection
Cantilever Beam
Max deflection for end load
y_max = -F*L^3/(3*E*I)
Force required to produce deflection
F = -3*y_max*E*I/(L^3)
Moment in beam with end load
M = F*(x-L)
Moment in beam caused by deflection at tip
M = (-3*y_max*E*I/(L^3))*(x-L)
Stress on beam cause by moment
sigma = M/(I/c)
Stress on beam cause by deflection at tip
sigma = (-3*y_max*E*I/(L^3))*(x-L)/(I/c)
Deflection at tip
Modulus of Elasticity
Length of beam
Width of beam
Thickness of beam
Half Thickness
Moment of Inertia
Location on beam
Stress
factor of safety
y_max =
1.125 inch
E = 27557.2 kpsi
L=
10 inches
h=
1 inch
b=
0.0239 inch
c = 0.01195 inch
I = 4.55E-06 inch^4
x=
0 inch
sigma =
© Senior Design Team 02021
11.11 kpsi
2.555166
Page 167 of 184
Appendix G – Chaotic Waterwheel Equation Derivations
Notation:
= angle in the lab frame
(t) = angular velocity of the wheel, increases counterclockwise, as does
m(,t) = mass distribution of the water around the wheel
2
Such that the mass between 1 and 2 defined as M (t ) m( , t )d
1
Q() = inflow (rate at which water is pumped in by the nozzle above position
r = radius on the wheel where the cups are attached
K = leakage rate
v = rotational damping rate
I = moment of inertia of the wheel
Conservation of Mass:
Mass in sector between 1 and : M (t )
2
m( , t )d
1
1.
2
Qd
t
Mass pumped in by the nozzle:
1
2.
2
Mass that leaks out: Kmd t
1
Leakage rate proportional to the mass of water in the cup
© Senior Design Team 02021
Page 168 of 184
3.
As the wheel rotates, water is carried into the section under examination for a nearby
section: m(1 )t
4.
As the wheel rotates, water is carried out of the section under examination to a nearby
section:
m( 2 )t
By combining all the terms, the change in the mass is as follows:
2
2
M t Qd Kmd m( 1 )t m( 2 )t
1
1
2
dM
m
Q Km
d
dt
1
In differential form, this yields:
The mass has already been defined as: M (t )
2
m( , t )d
1
2
2
m
m
d Q Km
d
Combining the two:
t
1
1
From this we can determine that the change in mass with time can be defined as:
m
m
Q Km
t
Continuity Equation
Torque Balance:
The rotation of the wheel is governed by a basic equation to balance the applied torque
and the rate of change of angular momentum.
I (damping torque) ( gravitational torque)
In this system, there are two sources of damping. The first source is a viscous damping
from the brake. The second is an inertial damping, caused by the spin-up effect because the
water enters the cups with zero angular momentum. Both of these values are proportional to the
© Senior Design Team 02021
Page 169 of 184
angular velocity of the wheel and are grouped as one value. The value of 'v' must be greater than
zero and the negative sign indicates that the damping opposes the system's motion.
Damping torque = -v
The gravitational torque results from the water that is being pumped into the wheel at the
top. The torque that results within an infinitesimal sector is:
d (dM ) gr sin( ) mgr sin( )d
From this equation, we can find that the gravitational torque of the system is:
2
gravitational torque gr m( , t ) sin( )d
1
These equations can now be combined to obtain a torque balance equation for the system.
2
I v gr m( , t ) sin( )d
Integro-Differential Equation
0
Amplitude Equations:
Because the value of m(,t) is periodic in q, it can be written as a Fourier series.
m( , t ) a n (t ) sin( n ) bn (t ) cos( n )
0
The inflow for the system can also be written as a Fourier series. The inflow is centered
directly over the wheel resulting in it being symmetric and eliminating the ‘sin’ terms from the
Fourier series.
Q( ) q n cos( n )
0
© Senior Design Team 02021
Page 170 of 184
When these series are substituted into the Continuity Equation, the results equation is
developed.
a
(
t
)
sin(
n
)
b
(
t
)
cos(
n
)
n
n
q n cos( n )
t 0
0
K a n (t ) sin( n ) bn (t ) cos( n )
0
a n (t ) sin( n ) bn (t ) cos(n )
0
From this equation, the two amplitude values are defined as follows.
a n nbn Kan
bb nan Kbn qn
The series expansion of the mass function is then substituted into the Integro-Differential
Equation to produce this equation.
2
I v gr an (t ) sin( n ) bn (t ) cos( n ) sin( )d
0 0
2
I v gr a1 sin ²( )d
0
I v gra1
Because this only holds when n = 1, a1, b1, and form a closed system. For any value of
‘n’ not equal to one, the three variables are decoupled. The resulting system of equations the
define the motion of the waterwheel are:
a1 b1 Ka1
b1 a1 Kb1 q1
I v gra1
© Senior Design Team 02021
Page 171 of 184
From these equations, the fixed points within the system can be determined. First, all the
derivates are set to zero. Then we solve for the variable b1.
b1
Kq1
K2
2
b1 Kv
gr
It can then be seen that there are two types of fixed points present within this system.
The first occurs when there is no rotation; the wheel is at rest and the inflow is balanced by the
leakage.
=0
a1 = 0
b1 = q1/K
The second type of fixed point exists when the angular velocity is non-zero. From the above
equations, we find the stable angular velocity to be as follows:
( ) 2
grq1
v
K2
This solution can only exist if and only if the following is true.
grq1
K 2v
1
This dimensionless group is called the Rayleigh number. It represents the competition
between g and q1 (the gravity and the inflow) and K and v (the leakage and the damping). In the
case of the waterwheel, this group must be greater than one in order for motion to occur. As the
value increases past a critical value, instability will appear in the system. After the value has
been increased even further, the dynamics of the system will become chaotic.
© Senior Design Team 02021
Page 172 of 184
Appendix H – Chaotic Waterwheel Stress Analysis Spread
Sheets
Material Weight Size Properties
Stress Analysis of Chaotic Waterwheel
Wheel Failure at posts
Failure from Moment
Cup Assembly away from wheel
Lever Arm
0.0381 m
1.5 inches
Bolt
1 count
Post
1 count
Cup
1 count
Insert
1 count
Flat Washer
1 count
Lock Washer
0 count
Nut
0 count
End Cap
1 count
Total Mass
0.075643 kg
Weight
0.7418 N
Moment
0.028263 N*m
Half Radius of Washer
0.003969 m
Half Area of Washer
7.89E-05 m²
Stress
45113.87 Pa
45.11387 KPa
Compressive Failure
Flexure Failure
Failure
FALSE
Failure
FALSE
Safety
1684.626 Safety
1839.789
Factor
Factor
© Senior Design Team 02021
Page 173 of 184
Failure from Weight
Cup Assembly
Bolt
Post
Cup
Insert
Flat Washer
Lock Washer
Nut
End Cap
Total Mass
Weight
Area
Stress
Compressive Failure
Failure
FALSE
Safety
1863.403
Factor
Wheel Failure at plate
Failure from Moment
Cup Assembly away from wheel
Post
Cup
Insert
Flat Washer
Lock Washer
Nut
End Cap
Lever Arm
Total Mass
Weight, of one
Moment, total
Counter Moment Arm
Washer Area
Moment Arm*Area
Stress
Failure
Safety
Factor
Compressive Failure
FALSE
2886.179
© Senior Design Team 02021
2 count
1 count
1 count
1 count
3 count
1 count
1 count
0 count
0.08385 kg
0.822288 N
2.02E-05 m²
40785.59 Pa
40.78559 KPa
Flexure Failure
Failure
FALSE
Safety
2035.032
Factor
1 count
1 count
1 count
1 count
0 count
0 count
1 count
0.0381 m
0.070643 kg
0.692767 N
0.211155 N*m
0.0508 m
0.000158 m²
8.02E-06 m³
26332.39 Pa
Failure
Safety
Factor
26.33239 KPa
Flexure Failure
FALSE
3152.012
Page 174 of 184
Failure from Weight
Cup Assembly
Post
Cup
Insert
Flat Washer
Lock Washer
Nut
End Cap
Total Mass
Weight
Total Weight
1 count
1 count
1 count
3 count
1 count
1 count
1 count
0.07685 kg
0.753642 N
6.029135 N
Wheel Weight
12.25806 N
Total Weight
18.2872 N
Area
8.06E-05 m²
Stress
226761.7 Pa
Failure
Safety
Factor
Compressive Failure
FALSE
335.1536
© Senior Design Team 02021
Failure
Safety
Factor
226.7617 KPa
Flexure Failure
FALSE
366.023
Page 175 of 184
Appendix I – Chaotic Waterwheel Inertia Analysis Spread
Sheets
Mass Moment of Inertia of Rotational Member of Chaotic Waterwheel
Wheel:
Inertia
Post Holes
Inertia
0.0327 kg*m²
kg*m²
1.99E-05 kg*m²
Inertia
Total Inertia:
1.00E-05 kg*m²
0.0327 kg*m²
Inertia
Bolt Holes
0.001345 kg*m²
Inertia
Counter Bore
Inertia
Total Inertia:
2.08E-06 kg*m²
Bolt Holes
Plate:
2.08E-06 kg*m²
0.0013 kg*m²
Shaft:
Inertia
Mounting Bolts, Nuts, etc
Bolt Circle
Bolt Pattern
Bolt
Flat Washers
Lock Washers
Nuts
Total Mass
Inertia
© Senior Design Team 02021
8.72E-05 kg*m²
0.0508 m
4 locations
1 count
2 count
1 count
1 count
0.010156 kg
0.000105 kg*m²
Page 176 of 184
Cup Assemblies
Bolt Circle
Bolt Pattern
Bolt
Post
Flat Washers
Lock Washers
Nuts
End Nut
Plastic Insert
Cup
Total Mass
Inertia
Total Inertia
0.2032 m
8 locations
2 count
1 count
3 count
2 count
1 count
0 count
1 count
1 count
0.060168 kg
0.019875 kg*m²
0.0541 kg*m²
© Senior Design Team 02021
Page 177 of 184
Appendix J – Chaotic Waterwheel Flow Analysis Spread
Sheet
Flow Analysis Spread Sheet
Variables
1.94 slug/ft³
Dia. = 0.0416667 ft
.5 in
Length =
3 ft
Re = 15518.766
V = 4.0124805 ft/s
A = 0.0013635 ft²
H total = 3.1670236 ft
Hl = 0.0742327
H fitting = 0.0927909
Le/D =
90 (from Table 8.4 p. 367 in "Introduction to Fluid
Mechanics" by Fox & McDonald 5th edition)
f = 0.004124 (assume laminar flow from the low Reynolds
number)
Flow out of the cup
Vcupmax 4.0124805 ft/s
=
Qmax= 0.0003419 ft³/s
© Senior Design Team 02021
Cup dia. =
2.7 in
0.225 ft.
water height max=
0.25 ft
92 g/h
Page 178 of 184
Figure 55: Submerssible Pump Information Sheet from Vendor
© Senior Design Team 02021
Page 179 of 184
Appendix K – Matlab Files
Matlab Program Used In Chau’s Circuit Analysis
%
%
This is a program to load the output from PSpice
and to plot the results of the simulation.
load
load
load
load
v1.txt
v2.txt
il.txt
i.txt
plot(v1,v2)
title('Chua''s Circuit V1 vs. V2');
xlabel('V1 (volts)');
ylabel('V2 (volts)');
grid;
figure(2);
plot3(v1,v2,il)
title('Chua''s Circuit V1 vs. V2 vs. IL');
xlabel('V1 (volts)');
ylabel('V2 (volts)');
zlabel('IL (amps)');
grid;
figure(3);
plot(v1, i);
title('Chua''s Circuit I-V Characteristic');
xlabel('V (volts)');
ylabel('I (amps)');
grid;
© Senior Design Team 02021
Page 180 of 184
Multi-well Oscillator
%***********************************
%
Andrew Dick
%
doublewell.m
%
08/02/03
%***********************************
%
Clear Workspace and Command
Window
clear
clc
%***********************************
%
Variables
del=0.25;
w=1;
period=2*pi/w;
F=0.25;
T=250;
dt=0.01;
tau=125;
%***********************************
%
Initial Conditions
x0=1.00;
dx0=0.0;
%***********************************
sim doublewellsim
L1=length(t);
tran=1/L1;
L3=L1-tau;
%
Create Poincare Map
for i=1:floor(L1/((1/dt)*period));
x2pi(i)=x(floor(i*(1/dt)*period+1));
dx2pi(i)=dx(floor(i*(1/dt)*period+1)
);
end;
%
Reconstruct Attractor
XX=zeros(L3,2);
XX(:,1)=x(1:L3,1);
for i=1:(L3);
XX(i,2)=x(i+tau);
end;
%
Create Poincare Map
for i=1:floor(L3/((1/dt)*period));
XXx2pi(i)=XX(floor(i*(1/dt)*period+1
),1);
XXy2pi(i)=XX(floor(i*(1/dt)*period+1
),2);
end;
© Senior Design Team 02021
%
Calculate Power Spectral Density of
Signal
ac=xcorr(x,x);
fourier=fft(ac);
L2=length(fourier);
omega=[0:L2-1]*(1/L2)*(2*pi/dt);
psd=abs(fourier)/(2*pi);
figure(1);
plot(t(tran*L1:L1),x(tran*L1:L1),'b');
title('Forced Double Well Oscilator');
xlabel('Time, sec');
ylabel('Position');
ylim([-2 2]);
figure(2);
plot(t(tran*L1:L1),dx(tran*L1:L1));
title('Forced Double Well Oscilator');
xlabel('Time, sec');
ylabel('Velocity');
ylim([-3 3]);
figure(3);
plot(x(tran*L1:L1),dx(tran*L1:L1));
title('2-D Projection of Forced Double
Well Oscilator Attractor');
xlabel('Position');
ylabel('Velocity');
ylim([-3 3]);
figure(4);
plot3(x,dx,t);
title('3-D Projection of Forced Double
Well Oscillator Attractor');
xlabel('Position');
ylabel('Velocity');
zlabel('Time, sec');
figure(5);
plot(x2pi,dx2pi,' k.');
title('Poincare Map of Forced Double
Well Oscilator');
xlabel('Position');
ylabel('Velocity');
xlim([-2 2]);
ylim([-0.75 1.25]);
figure(6);
plot(XX(:,1),XX(:,2));
title('Reconstructed of 2-D Projection
of Forced Double Well Oscilator
Attractor');
xlabel('Position');
ylabel('Velocity');
Page 181 of 184
figure(7);
plot(XXx2pi,XXy2pi,' k.');
title('Poincare Map of Forced Double Well Oscilator');
xlabel('Position');
ylabel('Velocity');
xlim([-1.75 1.75]);
ylim([-1.75 1.75]);
figure(8);
plot(omega,psd);
title('Power Spectral Density of Chaotic Signal');
xlabel('w, rad/s');
ylabel('phi_x(w)/(2*pi)');
xlim([0 1.5]);
ylim([0 4*10^7]);
© Senior Design Team 02021
Page 182 of 184
Chaotic Waterwheel
%*************************************
%
Andrew Dick
%
waterwheel_simulation.m
%
02/13/03
%*************************************
%
Clear Workspace and Command Window
clear
clc
%*************************************
%
Values used by Lorenz
%
sigma=10
b=8/3
r=28
%*************************************
%
Variables
%
Chose Values
RE=28;
SIGMA=10;
%
Constant Values
g=9.80665;
pi=3.14159;
r=0.2032;
I=0.0541;
K=1;
%
Inflow and damping determined
q=(RE*SIGMA*K^3*I)/(pi*g*r)
v=SIGMA*K*I
%
Check Values
rayleigh=pi*g*r*q/(K^2*v)
sigma=v/(K*I)
%
Time Parameters
T=50;
dt=0.01;
tau=12;
str=1;
%*************************************
%
Initial Conditions
W0=0.0;
A0=1.0;
B0=0.0;
%*************************************
sim waterwheel
L1=length(t);
tran=str/L1;
L3=L1-tau;
trans=str/L3;
%
Reconstruct Attractor
WW=zeros(L3,1);
WW(:)=W(1:L3,1);
for i=1:(L3);
AA(i)=W(i+tau);
end;
© Senior Design Team 02021
figure(1);
subplot(3,1,1);
plot(t(tran*L1:L1),W(tran*L1:L1),'b');
title('Chaotic Waterwheel');
ylabel('Angular Velocity, W');
subplot(3,1,2);
plot(t(tran*L1:L1),A(tran*L1:L1));
ylabel('Value of A');
subplot(3,1,3);
plot(t(tran*L1:L1),B(tran*L1:L1));
xlabel('Time, sec');
ylabel('Value of B');
figure(2);
subplot(2,2,1);
plot3(W(tran*L1:L1),A(tran*L1:L1),t(tr
an*L1:L1));
title('Chaotic Waterwheel: W vs A');
xlabel('Angular Velocity, W');
ylabel('Value of A');
zlabel('Time, sec');
subplot(2,2,2);
plot3(W(tran*L1:L1),B(tran*L1:L1),t(tr
an*L1:L1));
title('Chaotic Waterwheel: W vs B');
xlabel('Angular Veloctiy, W');
ylabel('Value of B');
zlabel('Time, sec');
subplot(2,2,3);
plot3(A(tran*L1:L1),B(tran*L1:L1),t(tr
an*L1:L1));
title('Chaoti Waterwheel: A vs B');
xlabel('Value of A');
ylabel('Value of B');
zlabel('Time, sec');
subplot(2,2,4);
plot3(W(tran*L1:L1),A(tran*L1:L1),B(tr
an*L1:L1));
title('Lorenz System: W vs A vs B');
xlabel('Angular Velocity');
ylabel('Value of A');
zlabel('Value of B');
figure(3);
plot(WW(trans*L3:L3),AA(trans*L3:L3));
title('Reconstructed of 2-D Projection
of Chaotic Waterwheel Attractor');
xlabel('Angular Velocity, W');
ylabel('Angular Velocity delayed by
tau');
Page 183 of 184
figure(4);
plot(t(tran*L1:L1),W(tran*L1:L1),'b');
title('Chaoti Waterwheel: W time series');
xlabel('Time, sec');
ylabel('Angular Velocity');
figure(5);
plot(t(tran*L1:L1),A(tran*L1:L1),'b');
title('Chaoti Waterwheel: A time series');
xlabel('Time, sec');
ylabel('Value of A');
figure(6);
plot(t(tran*L1:L1),B(tran*L1:L1),'b');
title('Chaoti Waterwheel: B time series');
xlabel('Time, sec');
ylabel('Value of B');
figure(7);
plot3(W(tran*L1:L1),A(tran*L1:L1),B(tran*L1:L1));
title('Lorenz System: W vs A vs B');
xlabel('Angular Velocity');
ylabel('Value of A');
zlabel('Value of B');
figure(8);
plot(W(tran*L1:L1),A(tran*L1:L1));
title('Lorenz System: W vs A');
xlabel('Angular Velocity');
ylabel('Value of A');
© Senior Design Team 02021
Page 184 of 184