Locomotion Interfaces
advertisement

Locomotion Interfaces
John M. Hollerbach
University of Utah
Department of Computer Science
50 S. Central Campus Drive Rm. 3190
Salt Lake City, Utah 84112-9205
jmh@cs.utah.edu
http://www.cs.utah.edu/~jmh/
Tel (801)585-6978
Fax (801)581-5843
Locomotion Interfaces
John M. Hollerbach
University of Utah
1 Introduction
A motion interface is the means by which a user travels through a virtual environment (VE). Motion interfaces are
categorized as active or passive (Durlach & Mavor, 1994). The active motion interfaces are defined as locomotion
interfaces, which require self-propulsion by a user. Passive motion interfaces transport a user through the VE without
significant user exertion. They are further subdivided as inertial motion interfaces, where the body is moved as in a
flight simulator on a Stewart platform, and non-inertial motion interfaces, where the body is stationary as in the use of
a joystick.
1.1 Features of Locomotion Interfaces
Ordinarily we think of the use of our legs in walking as the meaning of locomotion, but a human-powered vehicle like
a bicycle may be involved. Similarly, treadmills and stationary bicycles have served as locomotion interfaces. A
locomotion interface approach that doesn’t involve a physical device is walking in place. For greater generality, a
more encompassing view of locomotion interface is taken to include any leg and arm combination for user selfpropulsion, for example, rowing machines and Nordic skiing machines.
The key feature of locomotion interfaces that distinguishes them from passive motion interfaces is repetitive limb motion.
The repetitive limb motion, or gait, results in the self-propulsion. Tracking of the user’s legs or body motion controls the
motion through the VE. Because of the repetitive limb motion, energy expenditure in gait is a key feature.
The effort in cycling the limbs is a basic physiological load.
Body weight may have to be supported if the user is standing.
The motion platform itself may require effort tied to a user’s speed of motion. For example, a stationary bicycle
may have a flywheel to simulate inertia and vanes to simulate viscous drag.
The energy extraction from the user by the locomotion interface can cause fatigue and affect decision making
processes, just as in the real world where we have to balance movement effort against movement goal.
Another feature of locomotion interfaces is the integration of proprioception with vision. Vision operates better for
relative depth perception than for absolute distance judgments. It has been shown that locomotion calibrates visual
distance judgments (Rieser, Pick Jr., Ashmead, & Garing, 1995). The implication is that appreciation of VE geometry
and distance is enhanced by the ability to locomote. The features of energy extraction and sensorimotor integration are
hypothesized to yield an increased sense of presence in the VE.
1.2 Workspace and Position versus Rate Control
In passive motion interfaces, a user is standing or seated, and manipulates some control or makes some motion that
changes the user’s position in the VE. The amount of user motion typically controls the rate of moving through the
VE. An example is a joystick; the deflection angle from center is the rate command. Another example is a driving
simulator; the amount by which the pedal is depressed controls the velocity of the vehicle. Rate control arises because
the workspace of the control device is much smaller than the virtual space through which the user wishes to move.
Because of the use of rate control rather than position control, repetitive motions are not required by the user to move
through a VE. Consequently, the user expends very little energy.
If such a device were used in position control mode, then the user would have to reindex to the center of the workspace
before making the next excursion to move forward. This repeated cycling would according to our definition result in a
locomotion interface. For example, repeated cycling of a joystick under position control would be like turning a crank.
For haptic interfaces, we may say that the device’s workspace directly matches that of the VE, and so position control
may be used. Repeated cycling is not required because the workspaces match (scaling may be involved). More
sophisticated controllers may use position control in central regions of the device’s workspace for precise positioning,
and rate control near the workspace boundaries for slewing across larger distances.
In summary, the control mode and relation of the device workspace to the VE workspace leads to an approximate
taxonomy for mechanical interfaces to VE systems:
Rate control is the key feature of passive motion interfaces.
Position control where the device and VE workspaces match is the key feature of haptic interfaces.
Position control with repeated cycling of the device (the gait) to cover the VE workspace is the key feature of
locomotion interfaces.
1.3 Locomotion Rendering
In the following section, different types of locomotion interfaces are surveyed that have been built to date.
Notwithstanding the taxonomy and attempt at generality above, most of these locomotion interfaces involve walking
while a few involve cycling.
Locomotion rendering may be defined similarly to haptic rendering, as the presentation of mechanical stimuli to
simulate normal locomotion. Aspects of locomotion that might be rendered include the following.
1.
Forward motion. Ideally a user should be able to walk or run forward or backward at any speed. Some devices
limit forward motion to a slow or moderate walk and constrain the step size. Other locomotion interfaces based
on walking in place don’t actually involve physical forward motion. When accelerating to a run, a user does not
typically experience an inertial force because the locomotion interface keeps the body stationary with respect to
the ground. One of the devices is capable of providing an artificial inertial force display.
1.
Turning. Ideally a user should be able to change the direction of walking arbitrarily. Some locomotion interfaces
limit the range of turning, while other devices which are essentially linear use some control action to initiate
turning that is somewhat artificial.
2.
Slope. Arbitrary aspects of slope would be ideally displayed, including walking on smooth slopes, including
sideways traversal, and uneven terrain such as stairs. Locomotion interfaces differ greatly in whether they address
slope or to what extent.
3.
Obstacles. We can’t walk through real walls and we shouldn’t be able to walk through virtual walls. Wall
constraints could be enforced merely by braking the locomotion interface, but certain devices display hitting a
wall more directly to the body.
4.
Body postures. Especially for walking simulators, there is an issue of the wide variety of postures and stepping
patterns that we might adopt, such as crawling or sidling. What postures a locomotion interface can accommodate
differs among the designs.
These aspects of locomotion rendering will serve to structure the discussion of locomotion interfaces below.
2 Locomotion Interfaces
A number of locomotion interfaces are derived from exercise machines, such as stationary bicycles, stair steppers, and
treadmills. Others have been specifically designed towards a particular locomotion interface approach. The following
is a taxonomy of locomotion interfaces along with a number of examples.
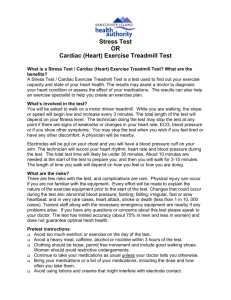
(A)
(B)
Figure 1 (A) Bicycle simulator on tilt platform. Photo courtesy of D. Brogan, R. Metoyer, and J. Hodgins,
College of Computing, Georgia Tech. (B) The Sarcos Uniport.
2.1 Pedaling Devices
Stationary bicycles represent a straightforward way to fashion a locomotion interface. Pedaling resistance can be
achieved passively, by means of a friction brake, or more realistically by a flywheel and vanes to simulate inertia and
viscosity. To simulate slope requires an electric motor to modulate the pedaling effort. Turning control is naturally
achieved with handlebars. Position sensors on the pedals and on the handlebars measure the linear motion and
direction of travel.
An elaboration is to place the bicycle on a motion platform. Brogan, Metoyer, and Hodgins (1998) employed a tilting
platform with an up-down range of +/- 12 deg to represent hills for a racing bicycle simulator (Figure 1(A)). The
Sarcos Uniport is a unicycle on a turntable (Figure 1(B)). The unicycle turns left or right based on user exertion
against the seat, measured by load sensors. The user is therefore obtaining the appropriate vestibular clues regarding
direction.
2.2 Walking in Place
A motion platform may be entirely avoided by measuring walking in place. A different set of muscles is employed
than in walking forward, but an advantage is a potentially lower cost system.
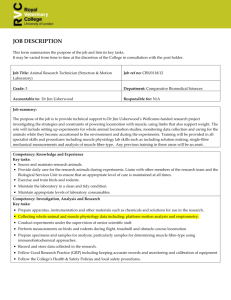
The Gaiter system (Templeman, Denbrook, & Sibert, 1999) employs magnetic trackers attached to the thighs just
above the knees and force sensors in the foot pads (Figure 2). Forward motion and turning are controlled by mapping
knee height, rate, and direction. The foot pad sensors aid in segmenting the steps. Magnetic trackers are also located
at the waist, head, and a handgrip. The waist sensor controls the position and orientation of the body, the head sensor
controls the gaze direction in conjunction with a head-mounted display, and the handgrip sensor is for auxiliary
purposes.
Gestural knee actions, which are defined as excess motions that do not participate in physical displacement of the
body, control the rate and direction of motion. Walking backwards is indicated by rocking the knee back, then
forward. In addition to just physically turning, it is possible to indicate turning while walking straight ahead by
rocking the knees to the side.
Figure 2 The Gaiter system. Photo courtesy of J. Templeman.
In other approaches to walking-in-place locomotion interfaces, Parsons et al. (1998) employ mechanical trackers on
the ankles to trigger a step when the foot is raised enough. Slater, Steed, and Usoh (1995) inferred the footsteps by
employing a neural network classifier on head bobbing as measured by a magnetic tracker; error rates of 10\% were
reported on correctly recognizing a step. They employ hand gestures to indicate going up or down a ladder.
With the foot just being raised up and down, there is of course no sense of forward propulsion when walking in place.
To give a sense of backward foot motion as if moving forward, one may use sliding between the feet and the ground.
A series of different locomotion interface approaches by Iwata are summarized in (Iwata, 2000). One approach
employed roller skates. The user was rigidly attached to a frame by a belt around the waist to absorb the forward
reaction forces and to provide stability. Foot forces for climbing or descending were created by a single string belt for
each foot, routed through pulleys to the bottom of each foot, and actuated by a DC motor. Subsequently, Iwata
employed shoes with low-friction films on the soles. A brake pad on the toe allowed completion of the swing phase.
The user was loosely constrained by a hoop frame. Grant and MaGee (1997) utilized the amount of horizontal foot
motion in a sliding-surface locomotion interface to drive the extent of forward motion.
2.3 Foot Platforms
A generalization of a stair stepper exercise machine is individually programmable foot platforms, where each platform
can be positioned in three dimensions. The Sarcos Biport (Figure 3(A)) employs hydraulically actuated three degreeof-freedom (DOF) serial-link arms on which the user stands. The user’s feet are attached to the platforms with
releasable bindings. Force sensors are located near the attachment points, and are employed in force control strategies
and steering control. When the user lifts a foot, the attached arm must follow with zero force to avoid dragging the
foot. When the user steps to contact a surface, the arm must be servoed to present a rigid surface.
A reverse centering motion is superimposed on the forward motion to attract the user back towards the center of the
device. The foot mount permits the user to swivel left or right, and force sensors in the mounts signal the direction of
motion. The platforms are servoed to follow the user’s steps in whichever direction of motion. Moderate walking
speeds can be supported; the speed limitations are due to the structural stiffness of the present design. Besides the
presentation of uneven terrain, another advantage of such a device is the potential for simulating soft surfaces.
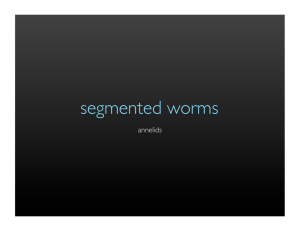
(A)
(B)
Figure 3 (A) The Sarcos Biport. (B) The GaitMaster. Photo courtesy of H. Iwata.
The hydraulic arms are necessarily powerful to support the forces of walking. Safety is a major concern. A variety of
safety devices have been implemented, including ceiling restraints, releasable bindings, and user-activated kill
switches.
Iwata’s GaitMaster (Figure 3(B)) comprises two 3-DOF parallel drive platforms (Iwata & Yoshida, 1999). Each
platform contains a passive spring-loaded yaw joint to allow some turning. The payload of each platform is 150 kg. A
3-joint goniometer attaches a user’s foot to the platform to measure foot motion.
The platforms are mounted on a turntable to accommodate turning. The platforms primarily accommodate forward or
backward motion. The intent of this design is to avoid platform interference when stepping to walk in a sideways
direction. This type of interference is a potential problem with the Sarcos Biport. On the other hand, some modest
oblique walking angles are possible with the Biport, which leads to more natural walking.
2.4 Treadmills
Initial research employed passive treadmills, where the belt motion is entirely due to users pushing with their legs.
The forward motion is directly indicated by the belt motion. The user has to brace against side bars or handle bars
when pushing against the belt; handlebars allow turning control to be easily implemented. Passive treadmills are a
low-cost and inherently safe platform, although the naturalness of locomotion is compromised. More recently, active
treadmills have been employed where the belt speed is controlled by measurements of user position, either by optical
or mechanical tracking.
2.4.1 The Sarcos Treadport
The original Sarcos Treadport comprised a large 4-by-8 foot treadmill and a 6-axis mechanical tether that acts as a
position tracker (Christensen, Hollerbach, Xu, & Meek, 2000). The tether is actuated along its linear axis to be able to
push and pull on the user. A second-generation Sarcos Treadport has been constructed (Hollerbach, Xu, Jacobsen, and
Christensen, 2000) featuring a larger running surface (6-by-10 feet) and a fast tilt mechanism. Figure 4 shows the new
Treadport in conjunction with a 3-wall CAVE.
The tether attaches to a user at the back of a body harness. The belt velocity is made proportional to how far forward
from center a user moves. Walking backwards is also possible. An integral control term is added that gradually
recenters the user, to avoid the user getting too close to the front edge (Christensen et al., 2000). Natural forward
Figure 4 The second-generation Sarcos Treadport.
motion speeds are supported: accelerations of 1 g and peak velocities of 12 mph. Because of the belt size, a variety of
body postures can be supported, including crouching and crawling.
Because the Treadport uses a linear treadmill, the issue of how to control turning arises. Body pose measurements
from the mechanical tether are employed to control the rate of turning. Two control regimes are used: for stationary
users, the amount of twist about the vertical axis controls the rate of turning. For rapidly walking or running users, the
amount by which the user is displaced sideways from the treadmill center controls the rate of turning. For intermediate
locomotion speeds, the two control regimes are blended. The use of rate control requires reindexing: the user has to
move back to a center position to stop turning, then move the other direction from center to turn the other way.
Treadmills can represent slope naturally by means of a platform tilt mechanism. Due to the platform mass and the
slow actuation in commercial treadmills, the tilt cannot represent sudden slope changes. In the first-generation Sarcos
Treadport, for example, the tilt rate is around 1 deg/sec. While this might suffice for an exercise function, the slow tilt
rate is a limitation for virtual environments. The second-generation Treadport is specified for +/- 20 degrees in one
second, although the tilt is not currently operational.
An alternative is provided by the active mechanical tether on the Sarcos Treadport. The tether can push or pull along
its linear axis at the small of the back in a roughly horizontal direction. When walking uphill, the component f of
gravity force parallel to the slope opposing the user’s motion is f = m g sin , where m is the user’s mass, g is gravity,
and \theta is the slope angle. This extra effort in going uphill can be simulated by the tether pulling on the user with a
force f = m g sin , requiring a greater user effort. For a user going downhill, the tether would push with that force,
thereby requiring a lesser effort. User studies show the effectiveness of the mechanical tether force for slope display,
but the empirical relation between walking on a slope and user-perceived equivalent pulling force turned out to be f =
0.65 m g sin , i.e., 2/3rds of the expected (Tristano, Hollerbach, & Christensen, 2000). It was hypothesized that the
concentrated force application to just one point on the body, rather than a distributed gravity load over the body, was
responsible for the fractional force preference.
When accelerating on treadmills, it has been found that runners exert 35% less energy than on the ground. The
difference has been ascribed to an inertial force difference on the treadmill, essentially because the treadmill belt is
servoed to keep the user’s body stationary with respect to the ground. One idea is to vary the belt speed to decrease
the difference from ground locomotion (Moghaddam and Buehler, 1993), but this difference can never be completely
eliminated this way. Supposing a highly simplified dynamic model of the human as a cart with mass m, it would be
predicted that the missing inertial force should be f = m a, where a is the acceleration. In (Christensen et al., 2000) the
active tether of the Sarcos Treadport was employed to provide this simulated inertial force. User studies showed a
preference for such an inertial force display, over conditions of no tether force or of a spring-like tether force.
Actually a fractional preference of roughly f = 0.8 ma was found, possibly due again to the lack of distributed force
application over the body.
In the real world we can’t walk through walls, and we shouldn’t be able to walk through virtual walls either. One
alternative is just to brake the locomotion interface, although the user might then stumble forward. The active tether of
the Sarcos Treadport provides an alternative of applying a spring-like penalty force to simulate hitting a wall. The
treadmill is stopped simultaneously, but due to the active tether force the user does not stumble forward. This penalty
force is similar to viscoelastic opposing forces applied by haptic interfaces when a user attempts to push into a hard
surface.
Finally, it is desired to keep users away from the workspace boundaries. When a user accelerates on a treadmill, it is
possible to move off center because of limited bandwidth of the belt. Of course we don’t want users running off the
end of the platform. In the Sarcos Treadport, an integral control term is added to draw the user back towards the center
of the platform (Christensen et al., 2000). A software linear spring is also simulated by the active mechanical tether to
provide a kinesthetic cue to the user about the amount of forward deviation from center. There are hard limit stops on
the tether which prevent an excursion beyond the front edge.
Another concern is sideways motion on the treadmill platform and the user potentially falling off the side. Hardware
springs are provided on a base rotary joint and an attachment-end rotary joint on the mechanical tether of the Sarcos
Treadport to provide kinesthetic cues about the amount of sideways deviation. The second-generation Sarcos
Treadport has a large platform (6-by-10 feet) in large part to provide extra safety margins for sideways or forward
motion without falling off. In addition, crawling is facilitated. Another reason for a larger belt is the use of a dead
zone around a center position on the belt. If the user is stationary, small motions should not cause the belt to move,
otherwise it would be impossible to stand still. While a dead zone prevents this, the dead zone does remove some
useable area of the belt.
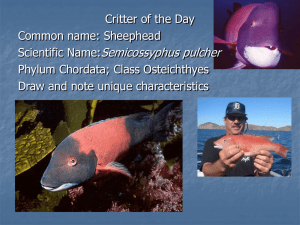
(A)
(B)
Figure 5 {(A) The ATLAS system. (B) The Ground Surface Simulator. Photos courtesy of H. Noma.
2.4.2 ATR Locomotion Interfaces
Two treadmill-style locomotion interfaces have been constructed at ATR by Noma, Sugihara, and Miyasato (2000).
The ATLAS system (Figure 5(A)) comprises a linear treadmill on a spherical joint that can pitch, yaw, and roll the
platform. The pitching motion is the normal tilt motion found in many commercial treadmills. The yaw motion acts
like a turntable to move the treadmill left and right, and is used for turning control. The roll motion allows the
simulation of walking sideways along a slope. The belt area is 145 mm long and 55 mm wide, and the maximum belt
speed is 4.0 m/sec. The yaw motion has a maximum rate of 1 rad/sec.
Motion control is achieved by optical foot tracking, employing a commercial video tracking system that tracks bright
markers on the front of the shoes at a 60 Hz rate. It was found that stance time was the best predictor of walking
speed, and a curvilinear relation was established to generalize across all users. Turning is achieved by swiveling the
treadmill in the direction that the user is stepping. The lateral amount of foot motion is measured to estimate how
much to rotate the platform. The platform cannot rotate continuously, and so must be reindexed to center beyond a
certain angle. Noma refers to this swiveling as turning cancellation, and to the function of a locomotion interface as
motion cancellation in general.
A head-mounted display is employed for the visual display.
orientation.
A magnetic tracker is employed to detect head
The Ground Surface Simulator (GSS) is a system meant to simulate uneven or step-like terrain (Figure 5(B)). The
GSS employs a linear treadmill with a flexible belt that is deformed underneath by six vertical stages. The belt is 1.5
m long and 0.6 m wide. Each stage is 0.25 m long and has a stroke of 6 cm at a speed of 6 cm/s. There are rollers on
the support surface of each stage. Because the geometry of the belt changes when deformed by the stages, an active
belt tensioning system is employed. A slope of 5 degrees can be presented by the GSS. Future plans call for mounting
the GSS on a motion stage as for the ATLAS system.
(A)
(B)
Figure 6 (A) The Omni-Directional Treadmill. From http://www.vsdevices.com/. (B)The Torus treadmill.
Photo courtesy of H. Iwata.
2.4.3 The Omni-Directional Treadmill
The Omni-Directional Treadmill (ODT) designed by Virtual Space Devices, Inc., provides a two-dimensional
treadmill surface designed to facilitate turning (Figure \ref{2D-treadmills}(A)). A two-orthogonal belt arrangement
creates the two-dimensional surface. A top belt is comprised of rollers whose axes are parallel to the direction of
rotation of that belt. These rollers are rotated underneath by another belt orthogonal to the first. The active surface is
1.3 m by 1.3 m, and the peak speed is 3 m/sec.
A mechanical position tracker on an overhead boom attaches to a harness worn by the user in order to control the
treadmill. The boom is active and may exert a force up to 89 N. Both a head-mounted display and a CAVE-like
display have been employed for the visuals.
Some unsteadiness in walking on the roller surfaces has been reported (Darken and Cockayne, 1997). A mismatch
between a user’s walking direction and the centering motion of the belt could occur that causes the user to stumble.
The mismatch presumably arise due to system lags and bandwidth limitations that permit the user to move off center.
This kind of mismatch would seem to be a potential problem for any two-dimensional motion stage.
2.4.4 The Torus Treadmill
Another two-dimensional treadmill design is Iwata’s Torus Treadmill (Figure \ref{2D-treadmills}(B)), which employs
twelve small treadmills connected side-by-side to form a large belt to allow arbitrary planar motion (Iwata et al.,
1999). The walkable area is 1 m by 1 m, and the maximum treadmill speed is 1.2 m/s. Motion control is achieved by
foot tracking employing magnetic trackers. A head-mounted display is provided where head orientation is again
sensed by a magnetic tracker.
In the initial implementation of the Torus Treadmill concept, the speed and area limitations limit walking to a slow
speed and relatively short steps. A larger design in the future would presumably overcome such limitations.
3 Discussion
Locomotion interfaces represent a relatively new field in which there are as yet few systems and researchers. The
thrust of current research may be described as exploring the design space of possible devices and approaches. Many of
these designs represent initial explorations and have not been optimized in any sense, so that judging performance
limitations is premature. Utility, functionality, cost, and safety are all issues that will need to be sorted out in choosing
among the options.
3.1 Forward Motion Display
Either leg-based tracking or body-based tracking has been employed to measure how much forward or backward
motion a user has produced. Leg-based tracking is readily accomplished where a mechanically tracked device is
coupled to a user’s feet, as for bicycles, foot platforms, and passive treadmill belts. Direct leg measurement can also
be achieved by magnetic sensors (Templeman et al., 1999) or by optical tracking (Noma et al., 2000). The use of the
stance time as an indicator of speed appears to be a viable method (Noma et al., 2000). Foot force sensors can aid the
segmentation of gait (Templeman et al., 1999).
For body-based tracking, a mechanical tracker attached to the user’s body is employed in the Sarcos Treadport
(Hollerbach et al., 2000) and in the Omni-Directional Treadmill (Darken et al., 1997). As mentioned earlier for a
walking-in-place locomotion interface (Slater et al., 1995), steps can also be approximately inferred from
measurements of head bobbing. The inaccuracy reported for this technique limits its utility though.
Optical tracking is attractive as opposed to mechanical tracking because the user is relatively unencumbered.
Magnetic tracking is known to suffer from sensitivity to environmental metal, which may not make it attractive around
the heavy metal structures of many locomotion interfaces. If one is to apply forces to the body as for the Sarcos
Treadport, then a mechanical connection is required anyway.
Relative freedom of movement and unencumberance tend to be strengths of treadmill-style locomotion interfaces. For
example, on the Sarcos Treadport a user can stride naturally and take off on a run at will. This kind of freedom has to
be counterbalanced against movement restrictions due to optimizing some other aspect of locomotion rendering such
as turning or uneven terrain. Foot platforms in particular impose some restrictions on forward motion speed.
Accelerating on a locomotion interface can never be the same as accelerating on the ground because the user’s body is
stationary, unless the missing inertial forces are applied to the body by some mechanical linkage such as the active
mechanical tether of the Sarcos Treadport. In that sense an active tether is demonstrably necessary to make ground
and locomotion interface running the same. Psychological studies clearly show the preference of users for inertial
force display (Christensen et al., 2000), but aside from preference it may be that displaying inertial force is not
necessarily important for making the locomotion interface useful.
The walking-in-place simulators are a low-cost approach towards constructing locomotion interfaces. Comparisons
with treadmill or foot platform systems should be made to determine the tradeoffs in terms of loss of motion fidelity
versus utility.
3.2 Turning Display
Turning intent can be measured through body tracking, leg tracking, or manipulation of a steering device. Steering
bars are readily employed for turning control for stationary bicycles, and have also been employed in passive
treadmills. Either rate control or position control in steering may be used.
Leg-based tracking is achieved optically by the ATLAS system (Noma et al., 2000). The amount of lateral motion in a
step guides the swiveling of the treadmill by a turntable. A magnetic sensor on the knee is used in Gaiter (Templeman
et al., 1999) to indicate turning by a rocking motion to the side; this represents a gestural control rather than a natural
turning motion. Mechanical attachments of the legs to the foot platforms for the Sarcos Biport and for the GaitMaster
(Iwata, 2000) guide turning. For the Sarcos Biport, force sensors on the attachment points are used to infer the
direction of walking.
Body-based tracking can directly indicate the direction of tracking. For example, the magnetic trackers in the walkingin-place locomotion interfaces (Slater et al., 1995; Templeman et al., 1999) measure rotation about the vertical axis.
The Sarcos Uniport employs force sensors in the seat, and any sensed sideways twisting controls the rate of turning.
The Omni-Directional Treadmill and the Sarcos Treadport use mechanical tethers attached to body harnesses for direct
sensing of motion direction.
The two-dimensional treadmill belt designs are attractive in terms of the naturalness of turning. Some control issues
apparently have to be sorted out for the Omni-Directional Treadmill because of reported unstable walking (Darken et
al., 1997). In particular, a mismatch between the direction of a centering motion and the direction of a user’s walking
can result in a sideways force that causes the user to stumble. The initial implementation of the Torus Treadmill
(Iwata et al., 1999) has led to slow gait and short steps, but this could presumably be remedied in a redesign. There is
an issue of the mechanical design complexity of the Torus Treadmill concept and the speed capabilities of the main
belt, which itself is the juxtaposition of many small treadmills. Speed constraints, complexity, and cost are particularly
pertinent factors to be investigated when the utility of such designs will be judged.
Another approach is using a turntable as for the Sarcos Uniport, the ATLAS system (Noma et al., 2000), and the
GaitMaster (Iwata, 2000). By swiveling the treadmill in the direction of walking, the ATLAS system achieves a
natural gait pattern in turning. Due to lags in rotation, it is possible that footfall occurs at a slant relative to the desired
walking direction, and so on the next step some correction by the user could be necessary. This might pose a problem
when a head-mounted display is employed, since users cannot see their orientation on the treadmill. In the GaitMaster,
the user does not step into the turn, so the gait is not as natural as for the ATLAS.
The Sarcos Treadport is a linear treadmill without a turntable, hence turning is not as natural. Because of its width,
some sideways motion is permissible although a user would eventually have to recenter. At an obvious cost the
treadmill could be made even wider to accomodate sideways motion. Although rate control is currently used for
turning, current research is addressing the use of proportional control within a certain angle. In proportional control
mode, a user actually steps in the direction of desired motion, but again a reindexing is eventually necessary.
The different turning approaches surveyed above may have implications for wayfinding. Most natural of course are
when visual, vestibular, and proprioceptive cues are consistent with normal turning, as for the two-dimensional
treadmills and the ATLAS system. The GaitMaster provides consistent vestibular and visual cues, although the
proprioceptive cues are not quite right. The Sarcos Treadport provides only realistic visual cues. Interestingly, there
have been no reported instances of simulator sickness with the Treadport, even though the vestibular and visual cues
are in conflict. This could be because the user is receiving proprioceptive cues for walking which, although not
realistic for turning, do indicate to users’ sensory processes that they are moving.
For the Gaiter walking-in-place locomotion interface, learning to gesture with the knees to indicate turning is evidently
an effective strategy (Templeman et al., 1999). Similarly, rate control for the Sarcos Treadport can be viewed as a
form of gesturing. From having hundreds of people trying this system, ranging from elementary school children to
adults of all ages, we have found that users adapt quite readily to this turning control mode. Often users discover how
to control turning quite rapidly without being told how. Again, future research and experience will be required to
decide how detrimental or effective different turning control modes are, especially in the context of other tradeoffs.
For example, the Sarcos Treadport excels at forward motion display at the cost of turning, whereas the twodimensional treadmills excel at turning at the cost of forward motion display.
Another issue is whether an active mechanical tether is used in conjunction with a CAVE display, as for the Sarcos
Treadport. It has been argued that the tether is necessary for displaying inertial forces and unilateral constraints and
useful for displaying slope. The tether sticks out of the back of the treadmill and so would interfere with display
screens in case the treadmill is placed on a turntable. For two-dimensional treadmills, the problem is also to be able to
apply forces in any direction. The overhead boom of the Omnidirectional Treadmill would seem a better solution than
the horizontal boom of the Treadport, but it might be difficult to get the same force output from such an arrangement.
3.3 Slope Display
Treadmills often are placed on tilting motion stages, so that walking up and down a smooth slope can be realistically
displayed. The Sarcos Treadport is an example, but also the bicycle simulator of Brogan et al. (1998) has been placed
on a tilting stage. The ATLAS system carries this concept one step further with a spherical joint mounting for the
treadmill, which not only acts as a turntable and tilts but also rotates the treadmill sideways. This allows traversing
sideways along a slope to be displayed.
The Sarcos Treadport can also simulate slope walking by pushing and pulling with a mechanical tether. Although the
Treadport has a tilt capability, due to the large platform mass the tilt speed is limited and sudden slope transients
cannot be displayed. The fast-acting mechanical tether evidently simulates slope reasonably well (Tristano et al.,
2000), and so is a lower-cost alternative to even having a tilting stage. One difficulty with a tilting stage is when a
CAVE display is used, because larger portions of the screens will have to be projected. Also, the belt of the Sarcos
Treadport is white to allow for the possibility of floor projection. A tilted platform will complicate correct imagery for
the floor.
Displaying uneven terrain such as steps is a particular strength of the foot platforms. Even soft ground could be
displayed in principle. Unless the foot platform stages tilt, the biomechanics of walking on a smooth slope will not be
quite right though. The Ground Surface Simulator (Noma et al., 2000) displays uneven terrain through the use of
vertical motion stages which deform a treadmill belt. The same comment about differences from smooth slope
walking will apply unless the belt is very stiff and doesn’t deflect much in its unsupported regions. For the Sarcos
Treadport, if the mechanical tether is effective at displaying rapidly changing slopes then its force profile might be
fashioned to give the illusion of uneven terrain. This is a topic of current research.
3.4 Unilateral Constraint Display
Along with inertial force display, a mechanical tether is demonstrably necessary to display unilateral constraints.
Simply braking the locomotion interface is only the vaguest simulation of hitting a wall. With the current harness
attachment of the Sarcos Treadport, the sensation is more akin to being pulled from the back than hitting something
with the front of the body. Perhaps an attachment to a plate in front of the body would simulate hitting a wall more
realistically. There have been light-hearted suggestions on swinging sandbags down from the ceiling. It seems,
nevertheless, that hitting a wall is not something we want to simulate with complete fidelity!
3.5 Body Posture
Relatively unencumbered walking and diverse gaits are a strength of treadmills. Most locomotion interfaces surveyed
here only support upright stance. If prone postures such as crawling are important, then a large treadmill surface such
as the Sarcos Treadport is the most realistic option.
3.6 Visual Display
CAVE-like displays and HMD’s have both been employed with locomotion interfaces. The use of HMD’s is
particularly appropriate when there are obstacles to the projection screens of CAVE’s, such as motion platforms that
rotate or tilt the treadmills or mechanical tethers. There are more safety concerns with HMD’s because users cannot
see their positions on the locomotion interface, which could for example cause them to fall off a treadmill or to lose
balance. The inconvenience of wearing an HMD is sometimes cited. The usual criticism of the poor visual quality of
HMD’s also applies. One problem with HMD technology is the lack of economic drivers to improve quality and
reduce cost. Simulator sickness might be more of a problem than with CAVE’s.
One advantage of HMD’s over CAVE’s is that objects can be projected between a user’s hand and line of sight. In
locomotion displays one is typically dealing with far-field vision, i.e., objects and terrain that are beyond the arm’s
reach. Therefore displaying the arm behind an object, which is the strength of HMD’s and a weakness of CAVE’s, is
not as important. Safety is facilitated by CAVE’s, because users can see their positions on, for example, a treadmill
belt and make appropriate adjustments. In a CAVE, users see their bodies which might lead to a greater sense of
immersion, as opposed to HMD’s where a user’s body is invisible. The importance of self-vision is not yet clear. The
economic drivers are very strong for improved CAVE’s in the future because of the projection market, and so higher
brightness, resolution, and image quality are to be expected.
There is not as much of an economic driver for stereoscopic projectors, which would be highly desirable for depth
perception. Ground projection has been reported as being particularly important for CAVE displays. For the new
Sarcos Treadport, the belt material was chosen white to allow for the possibility of ground projection. Ideally the
ground projection should be in stereo for depth effects.
CAVE’s definitely can complicate the design of locomotion interfaces, because platform motion might interfere with
the screens. The mechanical tether of the Sarcos Treadport sticks out the back, and so placement of a treadmill on a
turntable is problematical. Such a tether on a 2-D treadmill is also problematical, and as mentioned earlier an
overhead boom might be more appropriate but more difficult to design. If the platform tilts, then projection screens
are covered or uncovered, and larger projected images might be required. There can be gaps between the screens and
the locomotion interfaces. The belt of a treadmill itself is a visual gap, unless there is floor projection. Issues of
shadows cast by the user from a projector above and of visual deformation due to platform tilting would need to be
addressed.
A final concern with visual displays is their cost, which can be on a par with the mechanical display. HMD’s that are
at all decent are quite expensive. CAVE’s require multiple high-quality projectors, special screens, and special
mirrors. At the moment special-purpose graphics engines are required to produce realistic displays, but the expense of
graphics engines is expected to decline dramatically in the future. A kind of cost for CAVE’s is the need for large
rooms for placement of screens, mirrors, and projectors, including overhead space.
Besides vision, it would be desirable to include auditory displays for ambient sounds as well as footstep sounds.
Stereophonic ambient sounds, for example from walking in a forest, could aid the sense of immerison and aid spatial
orientation. In the haptics literature, it has been shown that the sound of contact can bias the perception of surface
stiffness and material. Similarly, it is possible that different footstep sounds can bias the perception of the kind of
ground one is walking on. Noise-canceling headphones might be useful to filter out any sounds coming from the
locomotion interface.
But why stop with audio? Olfactory displays are progressing, and it would be nice to smell the pine scent of forests
we’re walking through. Fans could be placed to simulate wind.
3.7 Safety
Because body weight and the forces of locomotion have to be supported, locomotion interfaces have to be rather
powerful. Safety is potentially much more of a concern than with haptic interfaces. Programmable foot platforms are
essentially powerful robot arms attached to the feet, and any malfunction could be painful. A not very funny joke is
the potential wishbone effect.
The danger with treadmills is falling off the sides or stumbling. Ceiling restraints can help, as well as proprioceptive
centering cues and sidebars. As mentioned above, the use of CAVE’s rather than HMD’s is probably safer. The
active tether of the Sarcos Treadport is also a potential safety concern, although a literature search showed that the
tether forces are well within normal loads to the spine (Hollerbach et al., 2000).
Safety in locomotion interfaces will also be enhanced through a judicious mixture of kill switches, watchdog timers,
software constraints on motion, and hardware limit switches.
3.8 Locomotion and Haptics
Eventually we would want to manipulate as well as walk. Adding a haptic interface to a locomotion interface will be
quite a challenge, because of the movement possible on a locomotion interface. A haptic interface would have to have
a large workspace but be kept out of the way. Some sort of ceiling mount might be required.
Due to the Greek origin of the word haptics, one usually associates the forces experienced in manipulating with our
arms and hands with the term. These days the term haptics seems to be generalized to include any force application to
any part of the body. Thus Iwata (2000) has coined the term foot haptics for the programmable foot platforms.
Similarly, body haptics has been used to describe forces applied to the body by the active tether of the Sarcos
Treadport. It is probably useful though to consider that locomotion interfaces are a distinct class of devices from
traditional haptic interfaces.
3.9 Applications
Whereas concrete application areas for haptic interfaces are starting to emerge, such as for mechanical CAD interfaces
and surgery training, the concrete areas for locomotion interfaces are not as developed. Certainly training is a strong
candidate, such as in military rehearsals (Grant et al., 1997; Parsons et al. 1998) or fire fighter training (Iwata et al.,
1999). Telecommunication and control of a remote mobile robot to serve as a physical avatar to allow one to
experience walking in a remote place is an intriguing application suggested for the ATLAS (Noma et al., 2000). With
terrain data now becoming available for moons and other planets of the solar system, one could simulate walking on
Mars or Venus, which could serve an education function. Entertainment, exercise and recreation, and health
rehabilitation are other suggested applications.
Finally, virtual environment displays have a strong role to play in psychophysical research, because physical and
visual stimuli are so conveniently synthesized. Rieser et al. (1995) towed a treadmill behind a car to decouple the
optical flow from the kinesthetic sense of walking. Such decoupling could be much more conveniently achieved with
a locomotion interface.
Acknowledgments
This work was supported by NSF Grants IIS-9908675 and CDA-96-23614.
References
Brogan, D.C., Metoyer, R.A., & Hodgins, J.K. (1998). Dynamically simulated characters in virtual environments.
IEEE Computer Graphics and Applications, 15, 58-69.
Christensen, R., Hollerbach, J.M., Xu, Y., & Meek, S. (2000). Inertial force feedback for the Treadport locomotion
interface. Presence: Teleoperators and Virtual Environments, 9, 1-14.
Darken, R.P., and Cockayne, W.R. (1997). The Omni-Directional Treadmill: a locomotion device for virtual worlds.
In Proc. UIST (pp. 213-221).
Durlach, N.I., & Mavor, A.S. (Ed.) (1994). Virtual Reality: Scientific and Technological Challenges. Washington,
D.C.: National Academy Press.
Grant, S.C., and Magee, L.E. (1997). Navigation in a virtual environment using a walking interface. In NATO RSG18 Workshop on Capability of Virtual reality to Meet Military Requirements. Orlando, FL.
Hollerbach, J.M., Xu, Y., Christensen, R., and Jacobsen, S.C. (2000). Design specifications for the second generation
Sarcos Treadport locomotion interface. In Proc. ASME Dynamic Systems and Control Division. Orlando, Nov. 5-10.
Iwata, H. (2000). Locomotion interface for virtual environments. In J. Hollerbach & D. Koditschek (Ed.), Robotics
Research: the Ninth International Symposium (pp. 275-282). London: Springer-Verlag.
Iwata, H., and Yoshida, Y. (1999). Path reproduction tests using a Torus Treadmill. Presence: Teleoperators and
Virtual Environments, 8, 587-597.
Moghaddam, M., and Buehler, M. (1993). Control of virtual motion systems. In Proc. IEEE/RSJ Intl. Conf. on
Intelligent Robots and Systems (pp. 63-67). Yokohama, July 26-30.
Noma, H., Sugihara, T., and Miyasato, T. (2000). Development of ground surface simulator for tel-E-merge system.
In Proc. IEEE Virtual Reality (pp. 217-224). New Brunswick, NJ, March 18-22.
Parsons, J., Lampton, D.R., Parsons, K.A., Knerr, B.W., Russell, D., Martin, G., Daly, J., Kline, B., and Weaver, M.
(1998). Fully Immersive Team Training: A networked testbed for ground-based training missions. In Proceedings of
the 1998 Interservice/Industry Training, Simulation and Education Conference. Orlando, FL.
Rieser, J.J., Pick Jr., H.L., Ashmead, D.H., and Garing, A.E. (1995). The calibration of human locomotion and models
of perceptual-motor organization. J. Experimental Psychology: Human Perception and Performance, 21, 480-497.
Slater, M., Steed, A., and Usoh, M. (1995). The virtual treadmill: a naturalistic metaphor for navigation in immersive
virtual environments. In M. Gobel (Ed.), Virtual Environments'95 (pp. 135-148). NY: Springer-Verlag.
Templeman, J.N., Denbrook, P.S., and Sibert, L.E. (1999). Maintaining spatial orientation during travel in an
immersive virtual environment. Presence: Teleoperators and Virtual Environments, 8, 598-617.
Tristano, D., Hollerbach, J.M., and Christensen, R. (2000). Slope display on a locomotion interface. In P. Corke and J.
Trevelyan (Ed.), Experimental Robotics VI (pp. 193-201). London: Springer-Verlag.