Two Kinds of Complexity
advertisement

Practical SAT Solving:
Achievements, Problems,
Opportunities
•! Part 1. Modern resolution based SATsolvers. What are they “made of”? Why do
they work so well?
•! Part 2. Linear size resolution proofs that can
not be found efficiently (equivalence
checking of combinational circuits)
•! Part 3. Testing the satisfiability of a formula
by computing a stable set of points.
Two Kinds of Complexity
Given a proof system S, proving unsatisfiability of
CNFs of a class K may be hard for two reasons
•! The shortest proofs for formulas of K in S have
exponential length (pigeon-hole formulas for RPS)
•! Formulas of K have short proofs in S, but there is no
algorithm to find them (S is not automatizable)
In this part, we consider the second kind of complexity on
the example of equivalence checking (EC). We introduce
an important class of EC formulas
that have short
resolution proofs that most probably can not be found
efficiently by a deterministic algorithm.
Summary (we are here !)
•! Part 1.
•! Part 2.
•!Introduction
•!Equivalence Checking (EC)
•!Circuits with a Common Specification (CS)
•!Toggle Equivalence
•!EC of Circuits with CS
•!Conclusions
•! Part 3.
Seperation between Deterministic and
Non-Deteriministic SAT-Algorithms
“Separation” of deterministic and non-deterministic
algorithms for satisfiable formulas is obvious. There is a
linear complexity non-deterministic algorithm while no
efficient deterministic algorithm exists (unless P = NP).
For unsatisfiable formulas such separation is not “trivial”.
Many classes of formulas having short resolution proofs of
unsatisfiability can also be easily solved by a deterministic
algorithm. This applies for example to 2-CNF and Horn
formulas.
Summary (we are here !)
A Very Generic Reason to Study EC
EC is “simpler” than SAT
•! Part 1.
•! Part 2.
•!Introduction
•!Equivalence Checking (EC)
•!Circuits with a Common Specification (CS)
•!Toggle Equivalence
•!EC of Circuits with CS
•!Conclusions
•! Part 3.
NF
N"
…..
NF
N"
….
…..
Two Practical Reasons for
Studying EC
A CNF formula F can be
represented as a circuit NF .
EC of and NF and N" (the latter
being a constant 0) is hard
because they are very different
“structurally”.
0
0
…..
…..
Miter
xk # xm
xm
xk
“External” Equivalence Checking. EC of combinational circuits is a very important part of the design
flow for electronic circuits. (For example, one may
need to check if the original circuit is equivalent to
one modified by a designer manually or optimized by
a second party logic synthesis tool.
“Internal” Equivalence Checking. When a circuit N is
optimized, for every logic synthesis transformation of N
there has to be a “proof” that the circuits before and
after this transformation are functionally equivalent.
z=y1 # y2
0 1
0 0 1
1 1 0
The circuit on the left
(called a miter) is satisfiable if and only if N1
and N2 are inequi-valent.
Summary (we are here !)
Circuits with a Common Specification
(first definition)
Circuit N2
Circuit N1
•! Part 1.
•! Part 2.
•!Introduction
•!Equivalence Checking (EC)
•!Circuits with a Common Specification (CS)
•!Toggle Equivalence
•!EC of Circuits with CS
•!Conclusions
•! Part 3.
G3
G1
x1
x2
G2
x3
x4
x5
Circuit M of multi-valued gates
Specification and Implementation
vi are “coding
variables”
Circuits with a Common Specification
(another definition equivalent to first)
Circuit N1
N3
N1
Z=Gi(X,Y)
q(Z)=I(Gi)(q(X),q(Y))
q(X),q(Y),q(Z) are encodings
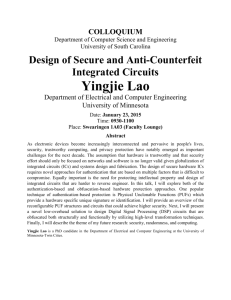
Circuits N1 and N2 have a common
specification (CS) if there is a circuit M of
multi-valued gates such that N1 and N2 are
just different implementations of M.
Subcircuits N11,N12, N13 and N21,N22,N23
above are two different implementations of
gates G1,G2,G3 (on the left).
N2
x1 x2 x3 x4 x5
Comminication graph
(acyclic)
Circuit N2
Circuits N1 and N2 have a CS if
•! Subcircuits N11,N12, N13 and N21,N22,N23
are connected “in the same way” (i.e. they
have the same communication graph).
•!N1i, N2i,i=1,2,3 are toggle equivalent
Toggle Equivalence
Summary (we are here !)
Multi-output circuits N1 and N2 are toggle equivalent if
N1(x)$N1(x*) % N2(x)$N2(x*)
•! Part 1.
•! Part 2.
•!Introduction
•!Equivalence Checking (EC)
•!Circuits with a Common Specification (CS)
•!Toggle Equivalence
•!EC of Circuits with CS
•!Conclusions
•! Part 3.
y1
N1
ym
z1 …
N1
N2
…
x1
zk
xn
y*1,..,y*m
y!1,..,y!m
x1
…
xn
z*1,..,z*k
z!1,..,z!k
y"1,..,y"m
Let P1 be the partition of the set of
input assignments of N 1 into
subsets for which N1 produces the
same output assignment.
Let P2 be the same partition for N2.
z"1,..,z"k
Input space partitions P1 and P2
If N1 and N2 are toggle equivalent,
then P1 and P2 have to be identical.
If P1$ P2, then there are two points
(i.e. input assignments) x! and x"
that are in the same subset of P1
and in two different subsets of P2 or
vice versa. So either N2 toggles
while N1 does not or vice versa.
zk
…
If N1 and N2 are toggle
equivalent, then there is
a one-to-one mapping K
between outputs assignments of N1 and N2.
N2
…
xn
x1
x1
…
xn
That is N1(x) = K(N2(x)) and N2(x) = K-1(N1(x))
If N1 and N2 are toggle equivalent and have only one output, they
are either functionally equivalent or complements of each other.
Sketch of Proof
y1 …
z1
ym
…
Finding Output Relation
y1
…
ym
z1 …
N1
x1
zk
N2
f*(x1,..,xi-1,,xi+1,..,xn) =
f(x1,..,xi=0,..,xn) & f(x1,..,xi=1,..,xn)
…
…
xn
x1
xn
Let H be represented as a CNF
formula. Then a CNF formula H*
representing the relation of outputs
of N1 and N2 can be obtained from
H by resolving out all the variables
of X,I1,I2.
Denote by H(X,I1,I2,Y,Z) the
function sat(N1) ' sat(N2). Here
sat(Ni) is the CNF formula
specifying Ni.
Let H*(Y,Z) be obtained from H
by existential quantification of
the variables of X,I1,I2. Then
H*(y,z)=1 iff there is an input
vector x such that N1(x)=y and
N2(x)=z.
Toggle Equivalence of Circuits
with Different Inputs
Bijective Function Relation
Let X and Y be sets of Boolean variables and F(X,Y) be a Boolean
function. F(X,Y) is a bijective function relation iff there is a subset Ax
( {0,1}|X| and BY ( {0,1}|Y| such that
•! |AX| = |BY|
•! F(X,Y) specifies a bijective mapping M: AX ) BY. Namely, F(x,y)=1 iff
x * AX, y * BY and y=M(x).
Testing if F(X,Y) is a bijective function relation needs two SAT checks:
R1 = F(X,Y) ' F(X*,Y*) ' EQ(X,X*) ' NEQ(Y,Y*)
R2 = F(X,Y) ' F(X*,Y*) ' NEQ(X,X*) ' EQ(Y,Y*)
If both R1 and R2 are unsatisfiable, then F(X,Y) is a bijective function
relation
Summary (we are here !)
y1 …
ym
z1
Suppose N1 and N2 have different
input variables that are related by
a bijective function relation
Bf(X,P).
N2
N1
x1
… zk
…
p1
xn
…
pd
Bf(x,p) = 1 iff M(x) = p where M is
a bijective function
Bf(x,p)=1
We assume that only pairs of input vectors x,p for which Bf(x,p)=1
are “legal”. Then one can extend definition of toggle equivalence.
Multi-output circuits N1 and N2 are toggle equivalent if for any pair
of vectors x,x* it is true that N1(x)$N1(x*) % N2(p)$N2(p*) where
p=M(x) and p*=M(x*).
An Example of EC of Circuits with a
known CS
N1
•! Part 1.
•! Part 2.
•!Introduction
•!Equivalence Checking (EC)
•!Circuits with a Common Specification (CS)
•!Toggle Equivalence
•!EC of Circuits with CS
•!Conclusions
•! Part 3.
N2
H 1*
N 23
N 13
N11
N 12
N 21
N 22
….
….
….
….
H1=Sat(N11) ' Sat(N21) ) H1*(out(N11),out(N21)) ) Is H1* a
bijective function relation?
H2=Sat(N12) ' Sat(N22) ) H2*(out(N12),out(N22)) ) Is H2* a
bijective function relation?
H3=Sat(N11) ' Sat(N21) ' H1* ' H2* ) H3*(out(N11),out(N21)) ) Is
H3* a bijective function relation?
EC of Circuits with a Known CS
(pseudocode)
Spec(N1) = {N11,..,N1k}, Spec(N2)={N21,…,N2k}
1
2
3
4
5
6
7
8
EC(N1, N2, Spec(N1),Spec(N2)) {
// check if Spec(Ni) is topological (i.e. that its comm. graph is acyclic)
if (topol_spec(N1,Spec(N1)) == ‘no’) || topol_spec(N2,Spec(N2)) == ‘no’))
return(‘CS_check_failure’);
// check isormophism of communication graphs
if (graph_isomorphism (N1,N2,Spec(N1),Spec(N2)) == ‘no’)
return(‘CS_check_failure’);
// main loop
for (i=1; i <= k ; i++) {
Dinp(N1i, N2i )= constraint_function(N1,N2,i);
Dout(N1i, N2i) = exist_quantify(N1i,N2i, Dinp);
if ( bijective_function_rel(Dout)) == ‘no’) return(‘CS_check_failure’);}
// last subcircuits are functionally equivalent?
10 if (Dout(N1k, N2k) is ‘equivalence_function’) return(‘equivalent’);
11 else return(‘inequivalent’);}
9
EC by Deterministic Algorithm If
CS Is Unknown
A formula F of K(p) can be solved by the following trivial
algorithm. This algorithm is to generate resolvents of length no
more than 2*p literals. (If a resolvent becomes longer than 2*p
it is discarded).
The complexity of this algorithm is |F|2p where |F| is the length
of formula F. Although, this algorithm is polynomial for a fixed
p, its complexity is huge.
This complexity is due to the fact that if Spec(N1) and
Spec(N2) are unknown, this algorithm just resolves all clauses
of F that can be resolved.
Complexity in Resolution
Let Spec(N1) = {N11,..,N1k}, Spec(N2)={N21,…,N2k}
Let pa be the size of the largest subcircuit Nai, a=1,2,i=1,..,k. We
will call pa the granularity of specification Spec(Na). Denote by p
max(p1,p2). We will call p the granularity of CS of N1 and N2.
The procedure we described is linear in the number of
subcircuits k and exponential in granularity p of CS.
The exponentiality in p is because one needs to compute
the relation between outputs of N1i, N2i and check if it
specifies a bijective funciton.
Let us K(p) be the class of CNF formulas describing
equivalence checking of circuits with a CS of granularity
bounded by a constant p. Formulas of K(p) have linear size
resolution proofs.
Can We Do Better?
It is very unlikely that there is an efficient algorithm for solving
formulas of K(p). This claim is based on the following two
assumptions.
a)! Let F be a formula of K(p) describing equivalence checking
of circuits N1 and N2 with specifications
Spec(N1),Spec(N2). Finding a short proof that F is
unsatisfiable would mean finding Spec(N1),Spec(N2)
b)! Given N1 and N2, finding their CS of granularity +p is hard.
(Ideally, one should show that the problem of finding a CS
of granularity + p for N1 and N2 is NP-complete or give
some other formal estimate of the complexity of this
problem.)
Summary (we are here !)
•! Part 1.
•! Part 2.
•!Introduction
•!Equivalence Checking (EC)
•!Circuits with a Common Specification (CS)
•!Toggle Equivalence
•!EC of Circuits with CS
•!Conclusions
•! Part 3.
Making SAT-solver More
“Intelligent”
In the case of EC of circuits N1 and N2 with a
CS, giving a SAT-solver a little “tip” in the form of
partitions of N1 and N2 into subcircuits makes
huge difference.
Practitioners usually try to build an efficient blackbox SAT-solver (that should not exist unless
P
= NP). A more reasonable approach is to explore
various possibilities to make a SAT-solver more
receptive to information supplied by the user. This
should make a SAT-solver more intelligent.
Power of SAT-Solver Is Very
Limited
We introduced a class of formulas where there
is a sharp separation between the complexity of
non-deterministic algorithm (that knows a CS of
circuits N1 and N2) and a deterministic algorithm
(that does know CS).
Sadly, this class of formulas is not a
mathemtical curiousity. On the contrary, it is very
important from a practical point of view.
This result emphasizes how limited the power of
a “black-box” SAT solver is.
Practical SAT Solving:
Achievements, Problems,
Opportunities
•! Part 1. Modern resolution based SATsolvers. What are they “made of”? Why do
they work so well?
•! Part 2. Linear size resolution proofs that can
not be found efficiently (equivalence
checking of combinational circuits)
•! Part 3. Testing the satisfiability of a formula
by computing a stable set of points.
Summary (we are here !)
•! Part 1.
•! Part 2.
•! Part 3. Testing the satisfiability of a formula by
computing a stable set of points.
•!Stable Set of Points (SSP)
•!Computing SSPs in points
•!Computing SSPs in clusters
•!Application to Symmetric Formulas
Taking into Account Formula
Specifics
Current SAT-solvers are not very good at taking into account
formula specifics. For example, if a formula has symmery, a
resolution based SAT-algorithm taking into account this
symmetry looks ackward.
The notion of a Stable Set of Points (SSP) is a promising
way to make use of particular properties of a CNF formula.
SSPs have the following interesting features:
•!An SSP of a formula is an algorithm-independent
“characteristic” of this formula.
•! SSPs can take into account formula specifics through
clustering of points
•!Building an SSP of a formula can be viewed as proving
unsatisfiability by induction.
Random Walk
Papadimitriou 1991,
Selman, Kautz 1992
flip
flip
flip flip
p1 ) p2 ) … ) pk ) s
C1 ) C2 ) … ) Ck ) ,
Any solution the closest
to p1 is reachable from p1
in n steps at most
Any clause falsifying pi
can be used as a
“stepping stone”
Let F(x1,…,xn) be a satisfiable
CNF formula. Let C= x1& x5 & x7
be a clause of F. Let p=(x1=0,….,
x5=0, …,x7=0…) be a complete
assignment falsifying C.
Since F is satisfiable, there is a
satisfying assignment s. Since s
satisfies C, then either x1=1 or
x5=1 or x7=1 in s.
So by flipping x1,x5 or x7 point p
becomes closer to s.
1-Neighborhood
Let C be the clause ~x1& x10 & x50 of a CNF F(x1,…,xn).
Let p=(x1=1,..,x10=0,..,x50=0) be a point that falsifies C.
Let the following three points p! =(x1=0,..,x10=0,..,x50=0), p
" =(x1=0,..,x10=1,..,x50=0), p!!! =(x1=1,..,x10=1,..,x50=1) be
obtained from p by flipping the value of x1, x10 or x50.
The set {p!,p", p!!! } is called the 1-neighborhood of p with
respect to clause C. It is denoted by Nbhd(p,C).
In general, given a point p falsifying clause C, Nbhd(p,C)
is the set of the points that are at Hamming distance 1
from p and that satisfy C.
Stable Set of Points (trivial example)
Let F be a CNF formula of, say, a million variables that contains
the following three clauses:
Stable Set of Points (example cont.)
x1=0,
p1,C1
x100=0
Denote by P the set {p1,p2,p3,p4}.
Note that C1(p1)=0, C2(p2)=0, C3(p3)=0, C3(p4)=0.
Note that Nbhd(p1,C1), Nbhd(p2,C2), Nbhd(p3,C3),Nbhd(p4,C3)
are subsets of P. For example, Nbhd(p1,C1) = {p2,p3}.
Stable Set of Points (definition)
Denote by Z(F) the set of all points p * {0,1}n for which F(p)=0.
Let P be a subset of Z(F). We will call a mapping G: P ) F
a transport function if for any p* P, C(p) = 0 if C=G(p).
Set P ( Z(F) is stable with respect to F and mapping G:P ) F if
for any pi* P, Nbhd(pi,C) ( P where C = G(pi)
F is unsatisfiable if and only if there is a set of points P and
transport function G such that P is a stable set of points (SSP)
with respect to F and G.
p2,C2
x1=1,
x100=0
x100
C1 = x1 & x100, C2 = ~x1 & x100, C3= ~x100 ,
Let p1=(x1=0,..,x100=0,..) be a point falsifying C1. Let p2 = (x1=1,..,
x100=0,..), p3 = (x1=0,..,x100=1,..), p4 = (x1=1,..,x100=1, ..) be
points obtained from p1 by flipping the value of x1 and/or x100.
x1
x1=0,
x100=1
p3,C3
p4,C3 x1=1,
x100=1
Suppose that we try to reach a
solution by random walk starting
from a point of P and using the
clause G(pi) as a “stepping stone”
when we reach pi. That is next
point is picked from the set
Nbhd(pi,G(pi))
C1 = x1 & x100,
C2 = ~x1 & x100,
C3= ~x100 ,
Denote by G the following function mapping P={p1,p2,p3,p4} to
{C1,C2,C3}:
G(p1) = C1, G(p2)=C2,
G(p3) = C3, G(p4)=C3
Since Nbhd(pi,G(pi))( P, such a
random walk never reaches a
point other than those in P. Then
the formula is unsatisfiable.
Summary (we are here !)
•! Part 1.
•! Part 2.
•! Part 3. Testing the satisfiability of a formula by
computing a stable set of points.
•!Stable Set of Points (SSP)
•!Computing SSPs in points
•!Computing SSPs in clusters
•!Application to Symmetric Formulas
A Trivial Algorithm for
Computing SSP
1. Generate a starting point p*,
Boundary={p*}, Body=,
2. Pick a point p * Boundary,
Boundary=Boundary \ {p}
3. Find the set X of clauses falsified by p.
If X=, then p is a solution. Stop.
4. Pick a clause C * X .
5. Nbhd(p,C) = Nbhd(p,C) \ (Boundary - Body)
Boundary=Boundary - Nbhd(p,C)
Body=Body - {p}
6. If Boundary = , then
Body is an SSP. Stop.
7. Go to step 2.
Summary (we are here !)
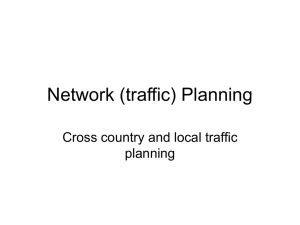
SSPs for Random CNF Formulas
Number of
variables n
|SSP|
|SSP| / 2n
%
10
430
41.97
11
827
40.39
12
1,491
36.41
17
30,381
23.18
22
736,329
17.55
23
1,370,890
16.34
Computing SSPs more efficiently
Computing an SSP of a CNF formula F “point by point” is too
inefficient.
•! Part 1.
•! Part 2.
•! Part 3. Testing the satisfiability of a formula by
computing a stable set of points.
•!Stable Set of Points (SSP)
•!Computing SSPs in points
•!Computing SSPs in clusters
•!Application to Symmetric Formulas
•!Conclusions
There are a few ways to “speed up” the computation of SSPs
dramatically. One of them is to compute an SSP in clusters of
points. Clusters may be represented implicitly. So instead of
an SSP one builds a stable set of clusters.
This approach has the following three advantages.
•!Many points are processed at once. Since a cluster may be
represented implicitly, it may be of exponential size.
•!By picking the “shape” of clusters one can input information
about subtle structural properties of formula F.
•! One can build complex hierarchies of stable objects like a
stable set of clusters of clusters and so on.
A Stable Set of Clusters
Let F be a CNF formula. Let D ( Z(F) and G be a transport
funciton G: D ) F. Denote by Nbhd(D,G) the union of 1neighborhoods Nbhd(p,G(p)) over all the points of D.
Let D1,.., Dm be subsets of Z(F). (We will call subset Di a
cluster). Let Gi be a transport function Di ) F. We will call
D1,..,Dm a stable set of clusters (SSC) with respect to F and
transport functions G1,..,Gm if for every cluster Di, i=1,..,m
Nbhd(Di,Gi) ( D1 - .. - Dm
If P is an SSP of F then any set of subsets D1,..,Dm such that
D1 - .. - Dm = P is an SSC.
And vice versa if D1,..,Dn is an SSC , then the set
D1 - ..-Dm is an SSP
Summary (we are here !)
•! Part 1.
•! Part 2.
•! Part 3. Testing the satisfiability of a formula by
computing a stable set of points.
•!Stable Set of Points (SSP)
•!Computing SSPs in points
•!Computing SSPs in clusters
•!Application to Symmetric Formulas
Building SSCs efficiently
The definition of an SSC we gave above is too “loose”. To
compute SSCs efficiently we impose three more informal requirements on clusters D1,..,Dm forming an SSC.
•!Each cluster Di has to have a “compact
representation” that can be handled efficiently.
•!Computation of 1-neighborhood Nbhd(Di,Gi) should
be “easy” for every cluster Di
•!There should exist an efficient procedure for testing
that Nbhd(Di,Gi) ( D1 - .. - Dm. To facilitate
efficiency one may require, for example, that
Nbhd(Di,Gi) = Dk or Nbhd(Di,Gi) ( Dk.
Symmetric CNF Formulas
Let F(x1,..,xn) be a CNF formula. Denote by . a permutation
preserving F i.e. .(F)=F.
Denote by Gr(F) the set
of all
permutations under which F is symmetric. This set forms a group.
Let F=(x1 & x2 & ~x3) ' (~x1 & x2 & x3) is symmetric under the
permutation swapping x1 and x3.
Point p * {0,1}n is symmetric to p* if .(p*)= p for some . *
Gr(F). Denote by D(p) the orbit of p i.e. the set of all points that
can be obtained from p by permutations of Gr(F).
From definition of a group it follows that if p1, p2 * {0,1}n are
symmetric with respect to Gr(F), then D(p1)=D(p2). If p1 and p2
are not symmetric, then D(p1) / D(p2)=,. So the set {0,1}n can
be partitioned into subsets of D1,..,Dk, each subset Di being an
orbit of a point p.
1-Neighborhood of an Orbit
Let Di be an orbit such that Di ( Z(F). (If p1,p2 * Di, then
F(p1)=F(p2). So checking whether Di is a subset of Z(F) is
trivial. If F(p)=0 for a point p of Di then Di ( Z(F).)
Let us define a transport function Gi:Di)F in the following
way. Let us pick a point p of Di and select a clause C of F
such that C(p) = 0. Let p* be a point of Di such that p*= .(p).
Then we pick the clause C* equal to .(C) as the value Gi(p*).
Since .(F)=F then the clause .(C) is in F. Besides, it is not
hard to show that C(p) = .(C)(.(p))= C*(p*)=0.
Let p* Di and C=Gi(p). Let Nbhd(p,C) be equal to {p1,..,pk}.
It is not hard to show that Nbhd(Di,Gi) = D(p1) - .. - D(pk).
Comments to The Procedure For
Building SSC
The procedure above can be viewed as building an
SSC. Each cluster Di is represented by a point p that is
currently in Boundary - Body. (That is Di is an orbit of a
point p from Boundary or Body.)
When we check if a point of Nbhd(p,C) is symmetric to
some other point of Boundary - Body (two modified lines
of paragraph 5) we want to make sure that we do not add
a cluster (i.e. an orbit) that has been already visited.
Let Body be equal to {p1,…,pm} when the set Boundary
is empty. Then D(p1),..,D(pm) is an SSC for F and
D(p1)-…-D(pm) is an SSP for F.
Building SSC for Symmetric CNF
1. Generate a starting point p*,
Boundary={p*}, Body=,
2. Pick a point p * Boundary,
Boundary=Boundary \ {p}
3. Find the set X of clauses falsified by p.
If X=, then p is a solution. Stop.
4. Pick a clause C * X .
5. Remove from Nbhd(p,C) every point p* that is // Modif. line
symmetric to a point of Boundary - Body // Modif. line
Boundary=Boundary - Nbhd(p,C)
Body=Body - {p}
6. If Boundary = , then
Body specifies an SSC. Stop // Modified line
7. Go to step 2.
Are Orbits “Simple” Clusters?
Orbits satisfy the three “simplicity” requirements to clusters we
mentioned above modulo complexity of checking if two points
are symmetric.
•! Each cluster D(pi) is easy to represent because it is
specified by one point (i.e. point pi). The rest of the points
of D(pi) are symmetric to pi. So each cluster D(pi) is
represented implicitly.
•! The set Nbhd(D(pi),Gi) is easily computable. One just
needs to compute the set Nbhd(pi,Gi(pi)). The k points of
Nbhd(pi,Gi(pi)) represent the k orbits whose union is equal
to Nbhd(D(pi),Gi).
•! To check if Nbhd(D(pi),Gi) is in D(p1) - .. - D(pm) one
needs to check if every point p* from Nbhd(pi,Gi(pi)) is
symmetric to a point from {p1,…,pm}. In general, this
operation may have non-trivial complexity.
Pigeon-Hole Formulas
CNF formula PH(m,n) describes the problem of allocating m
objects (pigeons) in n containers (holes). No two pigeons may
share the same hole.
Let Boolean variable phij be equal to 1 if i-th pigeon is in j-th hole.
Otherwise phij = 0. PH(m,n) consists of clauses phi1& .. & phin ,
i=1,..,m requiring that i-th pigeon has to be in at least one hole
and clauses ~phrj& ~phsj (r$s) r=1,..,m,s=1,..,m,j=1,..,n requiring
that two pigeons may not share the same hole.
For m > n , PH(m,n) are unsatisfiable. Haken showed that
formulas PH(n+1,n) have only exponential proofs in RPS.
Formulas PH(m,n) are highly symmetric. Gr(PH(m,n))
consists of all permutations .1•.2 where .1 (or .2) is a
permutation of pigeons (respectively holes).
Conclusions to Parts 1,2,3
•!The potential of resolution based SAT-solvers has not
been exausted. Search for practical methods for finding
short proofs may still bring surprises.
•!A SAT-solver (or, more generally, a computer) most
likely can not recover high-rank relations (like toggle
equvialence of circuits). So building SAT-solvers that
are receptive to structural information provided by the
user is very important.
•!Stable sets of points may provide a framework for
building such receptive SAT-solvers.
SSC for Pigeon-Hole Formulas
It can be shown that for PH(n+1,n) formula there is an SSC of 2*n
+ 1 clusters. Some clusters have exponential size (so the
corresponding SSP is exponential). The seven points below
specify the seven clusters for the case n = 3.
pg1
pg2
pg3
pg4
h1 h2 h3