ANIMAL BEHAVIOUR, 2006, 71, 1119–1129
doi:10.1016/j.anbehav.2005.09.006
What makes information valuable: signal reliability
and environmental uncertainty
COLLEEN M. MCLINN & DAVID W. STEPHENS
Department of Ecology, Evolution and Behavior, University of Minnesota
(Received 23 May 2005; initial acceptance 26 July 2005;
final acceptance 12 September 2005; published online 10 March 2006; MS. number: A10169)
We investigated the roles of signal reliability and environmental uncertainty in animal signal use. We developed a simple model that predicted when animals should switch between choosing the most common
option (which we call environment tracking) and following a signal. The model predicts signal following
when signal reliability exceeds environmental certainty. We tested this model experimentally using captive blue jays, Cyanocitta cristata. During each trial, the jays had to choose between two stimuli; one option
was correct and led to food, and the other was incorrect and provided no reward. In addition, a third stimulus, the signal, provided information about which choice stimulus was correct. Using this procedure, we
manipulated signal reliability (the probability that the signal matched the correct stimulus) and environmental uncertainty (the background probability that a given stimulus was correct) in a factorial experiment. Signal reliability and environmental uncertainty influenced signal use roughly as predicted. Jays
used the signal when the signal was reliable and the environment was uncertain, and they ignored the signal when it was unreliable and the environment was predictable. Quantitatively, we observed a bias in favour of environment tracking. Jays sometimes ignored the signal when it could have helped them, and
they ignored the signal in conditions where signal following and environment tracking produced equal
payoffs. We discuss the implications of these findings.
Ó 2006 The Association for the Study of Animal Behaviour. Published by Elsevier Ltd. All rights reserved.
Many aspects of behaviour, such as foraging, communication and mate choice, involve information processing,
and many of the subdisciplines of behavioural science
have considered mechanisms of information processing.
For example, one can think of most of the basic processes
of psychology (e.g. learning, perception, memory) as
mechanisms of information processing. Behavioural ecologists have in turn focused on the evolutionary economics
of information, asking, for example, whether it pays to
attend to or ignore an environmental signal (Stephens
1989; Bradbury & Vehrencamp 2000; Koops 2004).
This study considered two factors that should, in theory,
influence the value of information: signal reliability and
environmental uncertainty. Signal reliability should
enhance the value of a signal: the more reliable the
information, the more valuable the signal. An example of
a reliable signal is the carotenoid-based plumage coloration in male house finches, Carpodacus mexicanus, which
accurately indicates nutritional condition during moult,
and thus health or foraging ability (Hill & Montgomerie
1994). Females attend to this condition-dependent signal,
Correspondence: C. M. McLinn, 100 Ecology Building, 1987 Upper
Buford Circle, St Paul, MN 55108, U.S.A. (email: mcli0009@umn.edu).
0003–3472/06/$30.00/0
selecting brighter males and therefore higher-quality
mates (Hill 1991). In general, Bradbury & Vehrencamp’s
(1998, 2000) models suggest that useful signals should
provide a minimum level of accuracy that depends on
the relative payoffs of correct and incorrect choices.
However, reliability cannot make a signal valuable on its
own (Stephens 1989; Bradbury & Vehrencamp 2000). A
signal’s value also depends on the statistical distribution
of environmental states. Consider a simple situation in
which the environment can be in one of two states, A
and B, and the best choice for a hypothetical animal is
to choose behaviour ‘a’ if the environment is in state A
and behaviour ‘b’ if the environment is in state B. When
should an animal attend to a signal that tells it whether
A or B is true? If A and B are equally likely, then the animal
is uncertain about how to behave, and a reliable signal
may be valuable. If, however, A is true 99% of the time,
and B applies only 1% of the time, then the animal already has very good information about how to behave
and a signal may be unimportant, regardless of how reliable it is. We call this environmental uncertainty. Theoretically, then, signal reliability and environmental
uncertainty are both required to make a signal valuable.
Empirical evidence also supports the potential importance of environmental uncertainty in decision making.
1119
Ó 2006 The Association for the Study of Animal Behaviour. Published by Elsevier Ltd. All rights reserved.
ANIMAL BEHAVIOUR, 71, 5
For example, female peacock wrasses, Symphodus tinca,
may either search for and spawn with nesting males, or
spawn with readily available non-nesting males (Luttbeg
& Warner 1999). Females face a trade-off between the
cost of searching for nesting males and the increased
hatching success of eggs left in nests. Individual female
peacock wrasses could increase their fitness by estimating
the probability of finding a nesting male and adjusting
their reproductive decisions accordingly, and they appear
to do so (Luttbeg & Warner 1999). However, peacock
wrasses, and animals in general, could make costly mistakes if they rely too heavily on recent experience, especially if the environment changes rapidly. When the
environment is uncertain, a signal that reliably indicates
the best action could be valuable. Starting from these assumptions, we developed our own model and test of the
factors that should make information valuable.
always chooses red if p > 1/2 and red is rewarded p of the
time. So the payoff function
8
1
>
<1 p p <
2
VE ¼
1
>
:p
p
2
gives the expected benefits obtained by an environment
tracker. This expression gives a simple V-shaped function
with a minimum at p ¼ 1/2 (a tracker cannot do better
than 50:50 when the environment is a random mix of
types), and co-equal maxima at p ¼ 0 and p ¼ 1, where
there is complete certainty (Fig. 1). In contrast, a signal
follower obtains one unit when the signal correctly indicates the true state, which it does with probability q, and
obtains zero when the signal indicates the wrong state,
so the payoff function
VS ¼ q
Model
To explore the effects of signal reliability and environmental uncertainty, we developed a simple model using
the framework of statistical decision theory (reviewed in
Dall et al. 2005). Although we built the model with a specific experimental situation in mind, we think that it captures the general properties of the interaction between
reliability and environmental uncertainty. Assume that
an animal faces a choice between two alternatives at intervals throughout the day, for example, choosing between
a green choice key and a red choice key. On each trial,
one key is better than the other, and the animal obtains
a food reward if it chooses the good key, and obtains nothing if it chooses the bad key. If, in addition, a third stimulus also provides information about the true state, then
we can manipulate the reliability of the signal by controlling how accurately the third stimulus signals the true
state, and the environmental uncertainty by controlling
the relative frequencies with which red or green are the
‘true state’.
Let q represent the signal reliability. A reliable signal
matches the true state with probability 1 (q ¼ 1), and an
unreliable signal is completely random with respect to
the true state (q ¼ 1/2). Let p represent the overall probability that red is the true state. If p ¼ 1/2, there is high environmental uncertainty, because some completely
random process determines the true state from one trial
to the next. If p ¼ 1 or p ¼ 0, there is no environmental
uncertainty (red is always true if p ¼ 1, and green is always
true if p ¼ 0).
Now consider two simple strategies for dealing with this
system. An ‘environment tracker’ always chooses the
option that is most commonly ‘true’. So, if p > 1/2, it
chooses red, and if p < 1/2, it chooses green. (We assume
that the animal has enough experience with the system
to know which option is rewarded most frequently). A
‘signal follower’ simply chooses the option that matches
the signal. Now we want to calculate the expected gains
that individuals playing these two strategies obtain. An
environment tracker always chooses green if p < 1/2,
and green is rewarded 1 p of the time; similarly, a tracker
gives the expected benefits to a signal follower. An animal
should prefer signal following to environment tracking
when VS > VE. To show how the reliability (q) and uncertainty ( p) parameters determine which strategy is best, we
plotted our expressions for VS and VE on the same graph
(Fig. 1). These plots show that signal following is best
when p is near 1/2 (i.e. when environmental uncertainty
is highest), but that the signal-following region increases
in size as the signal becomes more reliable.
EXPERIMENT
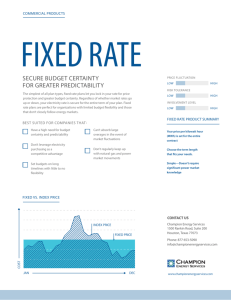
The plot of VE is symmetric and our decision to define p as
the probability that red is true is arbitrary, so we focused
on 1/2 p 1, which captures a range of conditions
from complete uncertainty at p ¼ 1/2 to complete certainty at p ¼ 1. Similarly, we restricted the signal reliability
VE, payoff to
environment
tracker
1
Payoff VE or VS
1120
VS, payoff
to
signal
follower
Signal following
best
0.5
q
0
0.5
1
No
uncertainty
Highest
uncertainty
No
uncertainty
Environmental certainty, p
Figure 1. Payoffs for environment tracking (VE) and signal following
(VS), plotted as a function of environmental certainty. Signal following is the best strategy near p ¼ 1/2, where VS is greater than VE.
MCLINN & STEPHENS: RELIABILITY AND UNCERTAINTY
parameter q to the range 1/2 q 1, where q ¼ 1/2 implies a completely unreliable signal and q ¼ 1 implies
a completely reliable signal. In this restricted rectangle,
signal following is superior to environment tracking
whenever q > p. Figure 2 shows the predicted ‘follow signal’ and ‘ignore signal’ regions in the signal reliability–
environmental certainty rectangle. Our experiment
factorially manipulated signal reliability and environmental certainty using three levels of each. Specifically, we
tested environmental certainty values of p ¼ 0.5,
p ¼ 0.75 and p ¼ 1.0, and signal reliability values of
q ¼ 0.5, q ¼ 0.75 and q ¼ 1.0. These manipulations create
nine points on the reliability–certainty rectangle (Fig. 2).
Our manipulations created three conditions where we predicted signal following, three where we predicted that subjects should ignore the signal and three where we
predicted indifference between signal following and environment tracking. We also tested the same three levels of
environmental certainty ( p ¼ 0.5, p ¼ 0.75, p ¼ 1.0) without any signal. These ‘unsignalled’ treatments provide a direct measure of the effect of a signal in signalled
treatments.
METHODS
Colour Assignments
Our subjects were six unrelated blue jays, which we had
captured as nestlings under appropriate state and federal
permits and hand-reared. The birds were of unknown sex
and ranged in age from 1 to 3 years at the time of the
study. Three of the subjects were na€ıve (band numbers 6,
12, 91), and three had been in other learning experiments
or a pilot experiment for this study (band numbers 22, 24,
77). We maintained the subjects in accordance with
Least
uncertain
Experimental
treatments
1
Environmental
certainty, p
Ignore signal
track environment
On each trial, the birds chose between two coloured
pecking keys. Pecking one colour led to food, but pecking
the other produced nothing. We used the following pairs
of colours: red and green, red and blue, and orange and
green. We randomly assigned one colour pair to each
subject, and each subject experienced these colours
throughout the experiment. To apply our model, we also
needed to define the environmental certainty parameter p
(the probability that colour X is true). For example, if we
assigned the colour pair red and green to a subject, p could
be the probability that red is true or the probability that
green is true. We determined the meaning of p randomly.
Trial Overview
0.75
Follow signal
Most
uncertain 0.5
0.5
University of Minnesota Institutional Animal Care and
Use Committee guidelines, on a 13:11 h light:dark cycle.
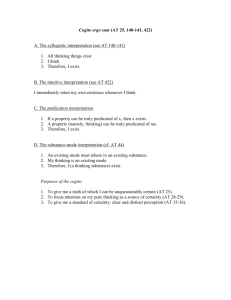
We conducted the experiment in operant chambers constructed from sheet metal and wood, measuring approximately 61.6 48.3 40.6 cm (Fig. 3). We equipped each
box with two panels. The rear panel consisted of a single
stimulus light and a perch. We mounted this rear perch
on a hinge and connected a microswitch that allowed us
to detect when a bird occupied the rear perch. The front
panel consisted of three pecking keys (Med Associates
ENV 124-AM, St Albans, Vermont, U.S.A.) and a stationary
wooden perch. The centre key (slightly elevated above the
two side keys) served as the signal or information key. The
two side keys served as the response keys. The jays could
easily reach the keys from the front perch. A pellet dispenser (Med Associates ENV-203-20) delivered 20-mg pellets into a food cup on the front panel. We connected the
entire apparatus to a computer running the Med-PC version IV behavioural test program, Med Associates. A program written in MedState Notation language controlled
all of the experimental contingencies and recorded all of
the subjects’ responses.
0.75
Signal
unreliable
1
Signal
completely
reliable
Signal reliability, q
Figure 2. The predicted ‘follow signal’ and ‘ignore signal’ regions on
a signal reliability–environmental certainty plot. Signal following is
beneficial when q > p. We tested nine experimental treatments
(open circles), three each predict signal following, environment
tracking and indifference.
Although we randomized colour assignments as explained above, we use the example of red and green. A
typical trial proceeded as follows. (1) The running program selected the true colour for the next trial, selecting
red with probability p and green with probability 1 p.
(2) After an 85-s intertrial interval, the computer switched
on the rear light, indicating the start of a trial. (3) When
the subject hopped on the rear perch, the computercontrolled signal key was then illuminated, showing a
white light for 5 s in unsignalled treatments or a red or
green light for 5 s in signalled treatments. In signalled
treatments, the colour of the signal light matched the
true colour (chosen in step 1) with probability q. (4)
Next, while the signal light remained illuminated, the
computer also switched on the red and green response
keys. We randomized the position of the two colours, so
that red occurred on the left half of the time and on the
right half of the time. (5) The subject’s first peck to one
of the response keys indicated its choice and determined
the outcome. If the subject pecked the correct key as
1121
ANIMAL BEHAVIOUR, 71, 5
(a)
(b)
30.5 cm
40.6 cm
30.5 cm
Rear perch
Rear stimulus light
48.3 cm
Rear perch
Water bowl
(c)
Front perch
48.3 cm
15.2 cm
Food cup
Signal key
Stimulus projectors
Pellet dispenser
48.3 cm
40.6 cm
1122
Left response
key
Right response
key
Magazine light
Food tube
Front perch
Food cup
Figure 3. Diagram of operant box used for the experiment. (a) Overhead view. (b) Rear panel, showing rear stimulus light and hinged ‘start’
perch. (c) Front panel, showing signal key, two response keys, magazine light to signal pellet delivery into cup and fixed front perch.
determined in step 1, then the computer extinguished all
the lights and delivered food; if it pecked the incorrect key,
then the computer extinguished all the lights but
delivered nothing. If, after 10 min, the subject had not
pecked either key, then the computer aborted the trial
and initiated a new one.
determine subject behaviour in the absence of a signal,
and to look for effects of experience in treatments where
one colour is more likely to be rewarded over the course
of the experiment.
Stability Criterion
Treatments
The birds experienced three unsignalled treatments and
nine signalled treatments. The unsignalled treatments
comprised three levels of environmental certainty,
p ¼ 0.5, p ¼ 0.75 and p ¼ 1.0 (where p ¼ 0.5 represents
complete uncertainty and p ¼ 1.0 means complete certainty, e.g. red is always true). The nine signalled treatments were a factorial combination of the same three
levels of environmental certainty with three levels of signal reliability, q ¼ 0.5, q ¼ 0.75 and q ¼ 1.0 (where
q ¼ 0.5 represents a signal that is true or false equally often, and q ¼ 1.0 means that the signal is always true).
The subjects experienced the treatments in an ABA design:
the unsignalled pretest first with the three treatments in
random order, followed by the nine signalled treatments
in random order, and finally, the unsignalled post-test
again, with the three treatments in a new random order.
The goal of the unsignalled pretest and post-test was to
Within each of the 15 treatments tested, the subjects
experienced several hundred trials. Each treatment lasted
for a minimum of 300 choice trials and a maximum of
1000. We terminated a treatment when the subject’s
behaviour met a stability criterion of less than 10%
change in proportional choice of the most common
colour over the last three blocks of 50 trials. We examined
the data and found no systematic between-subjects variation (from age or experimental history) in the number of
trials required to reach the criterion, although there was
an effect of treatment. We analysed only data from the
final 150 choice trials, when the stability criterion had
been met.
Forced or No-choice Trials
In addition to free-choice trials, 18% of all trials were
forced or no-choice trials. In these trials, the computer
MCLINN & STEPHENS: RELIABILITY AND UNCERTAINTY
illuminated only one choice colour and required a peck to
this single illuminated key to end a trial. Forced trials were
otherwise like normal trials for the prevailing treatment
(i.e. either signalled or unsignalled, and with the appropriate p and q values in effect). In a block of 22 trials, the
first four were forced trials (half forced most common trials and half forced least common trials) and the final 18
were free-choice, data-recording trials. This procedure ensured that subjects had recent experience with all possible
outcomes before they were allowed to choose freely.
P(Correct j Most Common True) and P(Correct j Least
Common True) would both be equal to the signal reliability in a given treatment (Fig. 4b).
Our graphs and nonparametric analyses used the raw
proportions of these two dependent measures, but for
parametric tests such as repeated measures analysis of
variance, we used arcsine-square-root-transformed proportions to achieve a more normal distribution of the
data (Zar 1999).
RESULTS
Dependent Measures
We can view both of the strategies that our experiment
examined (environment tracking and signal following) as
methods of discriminating good outcomes from bad outcomes. Signal detection theory (Egan 1975; Gescheider
1976) suggests that one can use a truth table to analyse
discrimination mechanisms. A simple two-by-two truth
table shows that any binary discrimination problem can
lead to four possible outcomes (Table 1). In our case, if
the ‘most common colour’ is the true state, then the subject can choose the most common colour (correctly) or
choose the least common colour (incorrectly). If we
know the probability of one of these two events (e.g. r),
we can calculate the probability of the other (s) because
they are complementary events (i.e. r þ s ¼ 1). Similarly,
if the ‘least common colour’ is the true state, then the subject can choose the most common colour (incorrectly) or
the least common colour (correctly), and again these are
complementary events. We used one probability from
each of these pairs as the dependent measures in our study.
Specifically, we calculated the relative frequency of correct
choices given that the most common colour was true
(P(Correct j Most Common True)) and the relative frequency of the correct choice given that the least common
colour was true (P(Correct j Least Common True)). Taken
together, these two dependent measures give a fairly complete picture of our subjects’ behaviour and separate environment tracking from signal following strategies.
Figure 4 shows how plots of P(Correct j Most Common
True) and P(Correct j Least Common True) versus signal reliability can distinguish between the environment tracker
and signal follower strategies. If the subject tracks the
most common colour, P(Correct j Most Common True)
would equal 1.0 and P(Correct j Least Common True)
would equal 0 across all levels of signal reliability
(Fig. 4a). Alternatively, if the subject follows the signal,
Table 1. Truth table diagram of dependent measures
True state
of the environment
Subject’s
choice
Most common
Least common
Most
common
Least
common
P(Correct j Most
Common True)
P(Incorrect j Most
Common True)
P(Incorrect j Least
Common True)
P(Correct j Least
Common True)
We discuss the results in two parts: predicted and actual
behaviour without a signal, and predicted and actual
behaviour with a signal.
Behaviour without a Signal
We tested three unsignalled treatments both before and
after the main factorial experiment. Obviously, a jay cannot
adopt a ‘signal following’ strategy in this case, because there
is no signal to follow. We predicted that an environment
tracker should be indifferent when there is environmental
uncertainty ( p ¼ 0.5), but it should exclusively choose the
most common colour in cases of higher environmental certainty ( p ¼ 0.75 and 1.0). Thus, we should observe P(Correct j Most Common True) ¼ 1.0, and P(Correct j Least
Common True) ¼ 0 when p ¼ 0.75 and p ¼ 1.0, but we
should observe P(Correct j Most Common True) ¼ P(Correct j Least Common True) ¼ 0.5 when p ¼ 0.5. These predictions require two provisos. First, when p ¼ 1.0, the
‘least common colour’ is never true, so P(Correct j Least
Common True) is undefined. Second, when p ¼ 0.5 there
is not a ‘most common colour’, although we define one relative to the subject’s most common colour in the other
treatments to simplify the analysis.
Figure 5 shows an overview of the results with a separate
line for each subject. Figure 6 shows the mean values of
observed behaviour. Observed behaviour closely matched
the environment tracking predictions. P(Correct j Most
Common True) was quite close to 1.0 and P(Correct j Least
Common True) was quite close to zero for the p ¼ 0.75 and
p ¼ 1.0 cases.
We did, however, observe a deviation from predictions in
our complete uncertainty condition ( p ¼ 0.5). Instead of
finding random choice in this condition, as predicted, we
found slightly elevated P(Correct j Most Common True)
values and reduced P(Correct j Least Common True) values.
For the p ¼ 0.5 case, we found a significant difference
between the ‘before’ and ‘after’ treatments for the P
(Correct j Least Common True) measure (Wilcoxon
matched-pairs test: T0.05(2) ¼ 0, N ¼ 6, P ¼ 0.0277), but
not for P(Correct j Most Common True) (T0.05(2) ¼ 4,
N ¼ 6, P ¼ 0.1730). Taken together, these results show
a tendency to choose the ‘most common’ colour even in
treatments when it occurred only half of the time. As the
before/after comparison shows, this is almost certainly an
effect of experience. For example, if the most common colour for a given bird was red, it would have experienced
other treatments in which red was the most commonly
1123
ANIMAL BEHAVIOUR, 71, 5
(b) Signal follower
(a) Environment tracker
1
P(Correct | Most
Common True)
Probability
0.5
P(Correct | Most Common True) &
P(Correct | Least Common True)
P(Correct | Least
Common True)
0
0.5
1
0.75
0.5
0.75
Signal reliability, q
1
Signal reliability, q
Figure 4. Plots of how P(Correct j Most Common True) and P(Correct j Least Common True) discriminate between environment tracker and
signal follower strategies. (a) Predictions for environment tracker: P(Correct j Most Common True) ¼ 1, but P(Correct j Least Common
True) ¼ 0. (b) Predictions for signal follower: P(Correct j Most Common True) ¼ P(Correct j Least Common True) ¼ q.
rewarded colour, and birds appear to be following this experience in the p ¼ 0.5 case. From an economic perspective,
this is a minor violation of our predictions, because in the
p ¼ 0.5 treatment there is no reason to prefer one colour
over the other, but it costs nothing to show a preference.
Overall, the results of our unsignalled treatments
show that the jays were superbly sensitive to environmental uncertainty. Our jays capitalized on information
that they had gained from experience to efficiently
exploit the simple binary choice problem set in our
experiment.
Behaviour with a Signal
To begin, we review the predictions for signalled
treatments. An animal following an ‘environment tracker’
(a) Unsignalled pretest
P(Correct | Most Common True)
or P(Correct | Least Common True)
1124
(b) Unsignalled post-test
1.2
1.2
1
1
0.8
0.8
0.6
0.6
0.4
0.4
0.2
0.2
0
0
–0.2
0.5
0.75
1
Environmental certainty, p
–0.2
Most Common True
6
12
22
24
77
91
Least Common True
6
12
22
24
77
91
0.5
0.75
1
Environmental certainty, p
Figure 5. Behaviour without a signal, showing individual variation. P(Correct j Most Common True) and P(Correct j Least Common True) are
plotted as solid and dashed lines, respectively, by subject for the three levels of environmental certainty. (a) The unsignalled pretest preceding
the main experiment; (b) the unsignalled post-test. P(Correct j Least Common True) is undefined for environmental certainty level p ¼ 1.
MCLINN & STEPHENS: RELIABILITY AND UNCERTAINTY
P(Correct | Most Common True)
or P(Correct | Least Common True)
(a) Unsignalled pretest
(b) Unsignalled post-test
1.2
1.2
1
1
0.8
0.8
0.6
0.6
0.4
0.4
0.2
0.2
0
0
–0.2
0.5
0.75
1
Environmental certainty, p
–0.2
Most Common True
Least Common True
0.5
0.75
1.0
Environmental certainty, p
Figure 6. Average behaviour in (a) the unsignalled pretest and (b) post-test, shown with 95% confidence intervals. P(Correct j Most Common
True) and P(Correct j Least Common True) are plotted as solid and dashed lines, respectively, representing the mean behaviour for the six subjects. P(Correct j Least Common True) is undefined for environmental certainty level p ¼ 1.
strategy always chooses the most common option. So, we
predicted that the environment tracker would always
choose correctly when the most common colour is true
(P(Correct j Most Common True) ¼ 1), and would never
choose correctly when the least common colour is true
(P(Correct j Least Common True) ¼ 0) (Fig. 4). These predictions apply unambiguously when the relative frequency of the more common option ( p) is strictly
greater than 0.5. If p ¼ 0.5, then an animal that chooses
to ignore the signal should be indifferent about which option it selects. A signal follower, on the other hand, will be
correct whenever the signal correctly indicates the true
state. This happens with probability q, so signal followers
should choose correctly with probability q. Therefore, for
a signal follower, P(Correct j Most Common True) ¼ P(Correct j Least Common True) ¼ q (Fig. 4). Finally, we predicted that signal following is superior to environment
tracking when the signal reliability (q) exceeds environmental certainty ( p).
Figure 7 gives an overview of the signalled data with
a separate line for each subject. Focusing on P(Correct j Most Common True), the figure shows comparatively
little variation when the environment is relatively certain
( p ¼ 0.75 and p ¼ 1.0), indicating that most individuals
followed an environment-tracking strategy. However,
when the environment was completely uncertain
( p ¼ 0.5), we observed much more variation, and a pattern
that more closely resembled the behaviour of signal
following.
We performed two repeated measures ANOVAs to test
these patterns statistically. First, we performed a three-
by-three factorial repeated measures ANOVA using P(Correct j Most Common True) as the dependent measure.
Analysis of the arcsine-square-root-transformed proportions showed a significant interaction between signal
reliability and environmental certainty (F4,20 ¼ 8.1793,
P ¼ 0.0004). P(Correct j Most Common True) increased
with signal reliability when the environment was completely uncertain ( p ¼ 0.5), but changed little with signal
reliability in other treatments (Fig. 8). There was also a significant main effect of environmental certainty
(F2,10 ¼ 17.109, P ¼ 0.0006), but no main effect of reliability (F2,10 ¼ 3.6776, P ¼ 0.0635). Next, we performed
a three-by-two factorial repeated measures ANOVA for
the P(Correct j Least Common True) dependent measure
(P(Correct j Least Common True) is undefined when
p ¼ 1, so we tested three levels of signal reliability and
two levels of environmental uncertainty). This analysis
showed significant main effects of environmental certainty (F1,5 ¼ 39.9395, P ¼ 0.0015) and signal reliability
(F2,10 ¼ 11.9805, P ¼ 0.0022), but no interaction between
the treatment factors (F2,10 ¼ 0.5448, P ¼ 0.5962). These
main effects are straightforward: P(Correct j Least Common True) increased with signal reliability and decreased
with environmental certainty.
Figure 9 plots the optimal behaviour and the means of
observed behaviour for each treatment. At the extremes of
environmental certainty (complete uncertainty, p ¼ 0.5;
and complete certainty, p ¼ 1.0), the results agree with
our predictions. Jays attended to the signal when the
environment was uncertain, and tracked the environment
(ignoring the signal) when the environment was certain and
1125
ANIMAL BEHAVIOUR, 71, 5
P(Correct | Most Common True)
(a)
P(Correct | Least Common True)
(b)
Environmental certainty p=0.5
1.2
Environmental certainty p=0.75
1.2
Environmental certainty p=1
1.2
1
1
1
0.8
0.8
0.8
0.6
0.6
0.6
0.4
0.4
0.4
0.2
0.2
0.2
0
0
0
–0.2
0.75
1
0.5
Signal reliability, q
Environmental certainty p=0.5
1.2
–0.2
1
1
0.8
0.6
0.6
0.4
0.4
0.2
0.2
0
0
–0.2
–0.2
0.75
1
0.75
1
Signal reliability, q
–0.2
0.5
0.75
1
Signal reliability, q
Environmental certainty p=0.75
1.2
0.8
0.5
0.5
6
12
22
24
77
91
0.5
Signal reliability, q
0.75
1
Signal reliability, q
Figure 7. Behaviour with a signal, showing individual variation. (a) P(Correct j Most Common True) by subject for each of the nine signalled
treatments. Environmental certainty levels are plotted as separate panels, with signal reliability along the X axis. (b) P(Correct j Least Common
True) by subject for the signalled treatments. There is no panel for environmental certainty level p ¼ 1, because when the least common colour
is never true, the dependent measure P(Correct j Least Common True) is undefined.
predictable. We found disagreement with our model in the
p ¼ 0.75 treatment, in which the animal’s prior experience
provided partial certainty about the true state on any given
trial. For this treatment, the model predicts a switch from
environment tracking when the signal is unreliable
1.2
P(Correct | Most Common True)
1126
Environmental certainty by signal reliability interaction
F4,20=8.1793, P=0.0004
1
0.8
0.6
0.4
0.2
Environmental certainty p=0.5
Environmental certainty p=0.75
Environmental certainty p=1
0
–0.2
0.5
0.75
1
Signal reliability, q
Figure 8. Interaction of signal reliability and environmental certainty,
for the dependent measure P(Correct j Most Common True). Signal
reliability is plotted on the X axis, and the lines represent mean behaviour at a specific level of environmental certainty. Whiskers
show 95% confidence intervals.
(q ¼ 0.5) to signal following when the signal is completely
reliable (q ¼ 1.0), yet the observed pattern resembled environment tracking at all levels of signal reliability. When
experience was partially informative, subjects undervalued
the signal and overvalued their prior information.
DISCUSSION
Significance of the Results
This study explored the contributions of signal reliability and environmental uncertainty in signal use. Our
model predicts that animals should attend to signals
when signal reliability exceeds environmental certainty.
Qualitatively, our results agree with the model. Signal
reliability and environmental uncertainty both influence
signal use. The strongest evidence for signal following
occurred when the signal was completely reliable (q ¼ 1.0)
and the environment was completely uncertain ( p ¼ 0.5).
Moreover, as we shifted conditions away from this case,
the jays shifted to a strategy of choosing the most frequently rewarded option (environment tracking). We
did, however, find a quantitative deviation from our predictions when the signal was completely reliable
(q ¼ 1.0) and environmental (or prior) information was
partially reliable ( p ¼ 0.75). In this case, the jays’ behaviour more closely resembled environment tracking than
signal following: they accepted a 75% success rate even
MCLINN & STEPHENS: RELIABILITY AND UNCERTAINTY
P(Correct | Most Common True)
(a)
Environmental certainty p=0.5
1.2
Environmental certainty p=0.75
1.2
Environmental certainty p=1
1.2
1
1
1
0.8
0.8
0.8
0.6
0.6
0.6
0.4
0.4
0.4
0.2
0.2
0.2
0
0
0
–0.2
–0.2
–0.2
1
0.5 0.75
Signal reliability, q
1
0.75
0.5
Signal reliability, q
0.5
0.75
1
Signal reliability, q
P(Correct | Least Common True)
(b)
Environmental certainty p=0.5
1.2
Environmental certainty p=0.75
1.2
1
1
0.8
0.8
0.6
0.6
0.4
0.4
0.2
0.2
0
0
–0.2
–0.2
0.5 0.75
1
Signal reliability, q
Optimal
Actual
1
0.5
0.75
Signal reliability, q
Figure 9. Optimal versus actual behaviour, plotted for each dependent measure, across the nine signalled treatments. (a) Solid lines and closed
circles: optimal proportion of P(Correct j Most Common True). Optimal behaviour changes from signal following at environmental certainty
level p ¼ 0.5 in the left panel, to environment tracking at p ¼ 1 in the right panel. Dashed lines and open squares: actual P(Correct j Most Common True) values. The lines represent the mean for all six subjects, and the whiskers show 95% confidence intervals. (b) Optimal and actual
behaviour for the dependent measure P(Correct j Least Common True) is plotted as above. There is no panel for environmental certainty level
p ¼ 1, because P(Correct j Least Common True) is undefined when the most common colour is always true.
when they could have achieved a 100% success rate.
Overall, our results suggest a bias favouring environment
tracking over signal following. For example, we consistently observed environment tracking when environment
tracking and signal following provided the same intake
rate (i.e. when p ¼ q). This is important because models
of signal use and communication typically emphasize
the properties of the signals (e.g. Maynard Smith & Harper
1995), but often ignore the simple alternative of exploiting the option that provides the best average payoff.
Our results suggest that blue jays are quite sensitive to
simple environmental regularities.
Our study applied techniques from the psychology
laboratory to the economics of information and signal
use. Although behavioural ecologists interested in foraging, learning and general decision making routinely use
these techniques, students of communication and signalling have tended to take a more naturalistic approach.
Although nothing can replace the observation of signals
and responses to signals in the wild, we think that our
approach offers an important source of supplementary
information (reviewed in Rowe & Skelhorn 2004). Using
operant techniques, one can directly manipulate economically important variables, and confirm the abilities of animals to respond to them.
Results in Context
Information-use models have taken several different
approaches. One approach focuses on measures of information quantity, such as the Shannon index and other
measures of entropy and uncertainty (Shannon & Weaver
1949). Another approach uses the tools of signal detection
theory and psychophysics. Signal detection theory comes
from engineering (Egan 1975), but psychologists have
exploited it in studies of sensation and perception
(Gescheider 1976). Our model closely follows a third approach based on statistical decision theory (e.g. DeGroot
1970; Dall et al. 2005), which provides a comprehensive
approach to the economics of information use that focuses
on how animals will use the information they acquire.
Most behavioural models of information use and communication follow the broad outlines of statistical decision
theory (e.g. Stephens 1989; Bradbury & Vehrencamp
2000; Koops 2004). Although our model represents a simple example of statistical decision theory (follow a signal if
q > p), it addresses two basic concepts: signal reliability
and environmental uncertainty.
In addition to these theoretical connections, our study
also makes connections with several types of empirical
work. For example, our study design superficially resembles
1127
1128
ANIMAL BEHAVIOUR, 71, 5
the matching-to-sample paradigm used in studies of animal learning and memory. In matching to sample, the
apparatus presents a sample stimulus to the animal (e.g.
a red key) and then offers a choice of stimuli in the test
phase. The investigators train subjects to select a stimulus
in the test phase that matches the sample. The main
variable in delayed matching to sample is the delay
between presenting the sample and the subject’s choice
in the test phase of a trial. Investigators use the effect of
delay on performance as a measure of the subject’s
memory. Delayed-matching-to-sample studies create an
economically simple situation to promote signal use, and
use this to study the properties of animal memory (e.g.
Blough 1959; Wilkie & Summers 1982; Olson et al. 1995).
Our study, in contrast, made minimal demands on memory (because our sample remained illuminated), and asked
instead about the economic determinants of signal use.
Several studies from a range of disciplines, using a range
of approaches, have shown the importance of environmental certainty (our p variable) and signal reliability (our
q variable). For example, students of signal detection plot
the relation between the frequency of correct acceptances
and the frequency of false alarms. They call this relation
the receiver operating characteristic (ROC) and consider
it to be a fundamental property of the sensory system being studied (Gescheider 1976). Psychophysicists usually
manipulate the relative frequency of correct and incorrect
stimuli (a p-like variable) to plot the receiver operating
characteristic. For example, if correct stimuli are much
more common than incorrect stimuli, subjects tend to accept everything, giving a point with relatively frequent
false alarms and frequent correct acceptances on the
ROC curve (Gescheider 1976). This basic result resembles
ours in that animals in certain environments (high p) do
not need to use a signal (as in our study) or discriminate
carefully (as in the calculation of ROC curves).
Behavioural ecologists have also examined the influence
of environmental uncertainty on behaviour. Evidence that
animals develop representations of variability in the
environment that guide their behaviour comes from
studies of foraging and habitat use. Devenport & Devenport (1994) showed that least chipmunks, Tamias minimus, and golden-mantled ground squirrels, Spermophilus
lateralis, developed temporally weighted estimates of
patch quality, allowing them to select patches with the
highest probability of reward. Similarly, Cartar (2004)
showed that bumblebees (Bombus spp.) used experience
with plant quality to guide return foraging trips. Animals
may also gain prior probability information by observing
the outcome of social interactions, as evidenced by studies
of swordtail, Xiphophorus helleri, fighting (Earley & Dugatkin 2002). These studies support our result that animals
may track the likelihood of events as one strategy for dealing with environmental uncertainty.
Studies from social behaviour have also shown the
importance of signal reliability, our q value, in influencing
behaviour. Several researchers have shown that animals devalue unreliable signals. For example, Cheney & Seyfarth
(1988) used playback experiments to create unreliable individuals in groups of vervet monkeys, Cercopithecus aethiops,
and found that group members came to ignore these
individuals. Richardson’s ground squirrels, Spermophilus
richardsonii, also assess the reliability of individual alarm
callers, using it to determine their subsequent time spent
in vigilance behaviour (Hare & Atkins 2001).
In summary, a large and varied literature addresses
communication, information, perception and signalling.
We think, however, that our study contributes something
by considering how environmental uncertainty and signal
reliability combine to influence the economics of information use.
Limitations and Future Research
Our results seem to indicate that the subjects favoured
prior certainty information (derived from experience) over
signalled information. We conclude this because subjects
used an environment-tracking rule in cases where signal
following and environment tracking produced equal
payoffs, and because in one case (q ¼ 1.0, p ¼ 0.75) subjects tracked the environment even through they could
have done better by following the signal. This observation
is important because models of information use tend to
underemphasize the importance of simple strategies like
environment tracking. It is too early, however, to make
strong claims about the generality of our results. Natural
signalling systems may or may not have this property,
and our procedure may have inadvertently biased our
results in this direction. For example, the most common
colour (the stimulus colour for which the p ¼ P(Colour X
is true) was applied) remained constant for a given subject
from one treatment to the next. Thus, for example, across
all treatments, a given individual experienced ‘red correct’
more frequently than ‘green correct’, and this made the
environment-tracking tactic ‘always choose red’ a good
default strategy. In six of the nine treatments of our factorial experiment, this strategy paid off at least as well as any
other. The order effect that we found in our unsignalled
treatments supports this analysis. One test of this hypothesis would be to arrange a similar experiment where treatments favouring signal following are more common.
Our experiment relied on learning. The jays needed to
learn the properties of the environment ( p) and the
reliability of the signal (q). As our results show, the
jays’ behaviour in this system was orderly and broadly
consistent with economic principles. However, some critics
may think that jays learning about the properties of
arbitrary signals in an arbitrary environment have little
to tell us about natural information use. Only further
study of this problem in more naturalistic settings can
resolve this question. We point out, however, that learning is an important component of many natural signalling systems, such as bird song learning (reviewed in
Hauser 1996) and alarm-call habituation (Seyfarth &
Cheney 1990). More broadly, we will need to study both
genetic and experiential factors to have a complete understanding of the mechanisms of animal information use.
The results of this study suggest several empirical
questions. For example, one might construct a more direct
test of the value of information by asking subjects how
much they will pay to see a signal. A further step would
MCLINN & STEPHENS: RELIABILITY AND UNCERTAINTY
involve both a signaller and a receiver in an experiment
that combines experimental games with the theory of
signalling and information use. We are now pursuing
these possibilities.
Conclusions
Our experiment quantified the effects of signal reliability and environmental uncertainty on animal information
use. Our results broadly support an approach to animal
information use based on statistical decision theory,
showing how blue jays behave in response to manipulation of theoretically important parameters. Our results
suggest that prior certainty is fundamental in animal
information use, even though students of information
use may find it more natural to focus on information
reliability.
Acknowledgments
We thank Matthew Scott and the numerous undergraduate
students who helped to complete this research, the behaviour group at the University of Minnesota, Ola Olsson and
an anonymous referee. This project was approved by the
Institutional Animal Care and Use Committee at the
University of Minnesota (Animal Subjects Code
0301A40421). Funding for C.M.M. was provided by
a Dayton and Wilkie Fellowship from the Bell Museum of
Natural History, and by the Department of Ecology,
Evolution, and Behavior, University of Minnesota.
References
Blough, D. S. 1959. Delayed matching in the pigeon. Journal of the
Experimental Analysis of Behavior, 2, 151–160.
Bradbury, J. W. & Vehrencamp, S. L. 1998. Principles of Animal
Communication. Sunderland, Massachusetts: Sinauer.
Bradbury, J. W. & Vehrencamp, S. L. 2000. Economic models of
animal communication. Animal Behaviour, 59, 259–268.
Cartar, R. V. 2004. Resource tracking by bumble bees: responses to
plant-level differences in quality. Ecology, 85, 2764–2771.
Cheney, D. L. & Seyfarth, R. M. 1988. Assessment of meaning and
the detection of unreliable signals by vervet monkeys. Animal
Behaviour, 36, 477–486.
Dall, S. R. X., Giraldeau, L.-A., Olsson, O., McNamara, J. M. & Stephens, D. W. 2005. Information and its use by animals in evolutionary ecology. Trends in Ecology and Evolution, 20, 187–193.
DeGroot, M. H. 1970. Optimal Statistical Decisions. New York:
McGraw-Hill.
Devenport, L. D. & Devenport, J. A. 1994. Time-dependent averaging of foraging information in least chipmunks and goldenmantled ground squirrels. Animal Behaviour, 47, 787–802.
Earley, R. L. & Dugatkin, L. A. 2002. Eavesdropping on visual cues
in green swordtail (Xiphophorus helleri) fights: a case for networking. Proceedings of the Royal Society of London, Series B, 269,
943–952.
Egan, J. P. 1975. Signal Detection Theory and ROC Analysis. New
York: Academic Press.
Gescheider, G. A. 1976. Psychophysics: Method and Theory. Hillsdale, New Jersey: L. Erlbaum.
Hare, J. F. & Atkins, B. A. 2001. The squirrel that cried wolf: reliability detection by juvenile Richardson’s ground squirrels (Spermophilus richardsonii). Behavioral Ecology and Sociobiology, 51,
108–112.
Hauser, M. D. 1996. The Evolution of Communication. Cambridge,
Massachusetts: MIT Press.
Hill, G. E. 1991. Plumage coloration is a sexually selected indicator
of male quality. Nature, 350, 337–339.
Hill, G. E. & Montgomerie, R. 1994. Plumage colour signals nutritional condition in the house finch. Proceedings of the Royal Society
of London, Series B, 258, 47–52.
Koops, M. A. 2004. Reliability and the value of information. Animal
Behaviour, 67, 103–111.
Luttbeg, B. & Warner, R. R. 1999. Reproductive decision-making
by female peacock wrasses: flexible versus fixed behavioral rules
in variable environments. Behavioral Ecology, 10, 666–674.
Maynard Smith, J. & Harper, D. G. C. 1995. Animal signals: models
and terminology. Journal of Theoretical Biology, 177, 305–311.
Olson, D. J., Kamil, A. C., Balda, R. P. & Nims, P. J. 1995. Performance of four seed-caching corvid species in operant tests of nonspatial and spatial memory. Journal of Comparative Psychology,
109, 173–181.
Rowe, C. & Skelhorn, J. 2004. Avian psychology and communication. Proceedings of the Royal Society of London, Series B, 271,
1435–1442.
Seyfarth, R. & Cheney, D. 1990. The assessment by vervet monkeys
of their own and another species’ alarm calls. Animal Behaviour,
40, 754–764.
Shannon, C. E. & Weaver, W. 1949. The Mathematical Theory of
Communication. Urbana: University of Illinois Press.
Stephens, D. W. 1989. Variance and the value of information. American Naturalist, 134, 128–140.
Wilkie, D. M. & Summers, R. J. 1982. Pigeons’ spatial memory: factors affecting delayed matching of key location. Journal of the
Experimental Analysis of Behavior, 37, 45–56.
Zar, J. H. 1999. Biostatistical Analysis. Upper Saddle River, New
Jersey: Prentice Hall.
1129