B. Hofmann-WellenhoL K. Legat, M. Wieser Navigation Principles of
advertisement

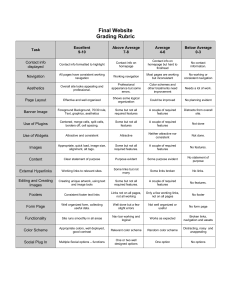
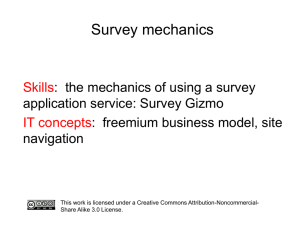
B. Hofmann-WellenhoL K. Legat, M. Wieser Navigation Principles of Positioning and Guidance With a contribution by H. Lichtenegger SpringerWienNewYork 16 Application examples 16.1 Conventional applications 16.1.1 Land navigation Land navigation is a task of everyday life of most people, either in terms of finding a way as a pedestrian or when steering a car or other vehicle. This section deals with land vehicles; pedestrian navigation is treated in Sect. 16.2 .1. In contrast to marine and aeronautic navigation. characteristic phases of navigation cannot be applied to land transport due to the greater flexibility afforded by land users when assessing their position. Land navigation requirements differ depending on what the user intends to do, the type of transport system used. and the user location (2001 FRS: p. 2-1). Generally. road and rail transport must be distinguished. Conventional navigation of individual vehicles in road transport is visual navigation using traffic signs aud analog road maps. Modern techniques are based on navigaion systems that involve positioning sensors, digital road maps, and software tools for route planning and guidance. These in-vehicle systems are denoted as vehicle navigation systems (VNS) and are described in more detail in Sect. 15.2.1 An example of additional supporting tools for vehicle navigation include close-range radar sensors for collision avoidance (Holpp 2002). If groups of road vehicles are concerned, advisory routing and fleet management systems are distinguished. In case of advisory routing systems, the involved vehicles are anonymous to a traffic center which collects traffic data and distributes appropriate traffic information to the road users. In case of fleet management systems, the involved vehicles are known to a dispatching center that performs a real-time monitoring of the vehicles and optimizes tour plans and time schedules. Furthers details about these systems are given in Sects. 15.2.2 and 15.2.3. Rail transport is characterized by a high level of automatization concerning routing and traffic management. Positioning is based on roadside infrastructure and autonomous onboard sensors. The strictly line-based mode of transport (i.e., the vehicles are "sticked" to the rail) affects the positioning methods and often requires locations rather than positions. 362 16.1.2 16 Application examples Marine navigation The procedures of marine navigation strongly depend on the type of vessel to be navigated, i.e., whether small recreational boats, ships, large transport vessels, or even submarines are concerned. Differences are caused by size, draft, steerage, flexibility, anchorage procedures, crew formation, and many other characteristics. This section only outlines the principles of marine navigation. Practical descriptions may be found in Brogdon (1995) focusing on boats and The American Practical Navigator (National Imagery and Mapping Agency 1995) mainly dedicated to larger vessel types. The latter includes also an excellent glossary of the terms of navigation. Technical details on various systems are found in Lachapelle (1998). Principles and regulations Generally, area navigation (from point to point) may be performed in free water with sufficient underwater clearance; navigation along predefined routes is required in restricted waters like along coasts, in harbor areas, and on inland waterways. However, marine navigation is subject to an increasing amount of traffic regulations. The major objective of these regulations is to improve the safety of navigation, e.g., by means of separation guidelines to avoid vessel collisions. Some areas are already controlled by maritime traffic management systems (Sect. 15.3). Maritime safety is further increased by the use of the electronic chart display and information system (ECDIS) and automatic position reporting systems dedicated for vessel monitoring and search and rescue (SAR) activities in case of accidents. Some modern vessels even include autopilots similar to aircraft. Navigation and piloting In marine navigation, piloting means high-precision navigation of a ship in restricted waters like channels. A pilot has exceptional local knowledge of the given area concerning aids to navigation, specific procedures, hazards, shallow water areas, etc. Pilots are usually not permanent members of ship crews but come on board only for traversing restricted passages, where close cooperation with the navigator, helmsman, captain, and other members of the ship crew is required. Autonomous navigation techniques Seaman's eye This is a classical way of piloting in coastal waters and harbor areas. The repeatable accuracy achieved by experienced mariners is excellent. Seaman's eye comprises a number of visual techniques: angle determination between 16.1 Conventional applications 363 terrestrial objects (e.g., using the angular width of the fingers on a stretched hand), information gained from the apparent visual alignment of objects (the objects are said to be "in range"), vertical angles for distance estimation, the color intensity of water (indicating the depth), the shape of the wake (giving hints about the current), etc. Note that the application of seaman's eye becomes difficult in bad weather or unfamiliar waters. Dead reckomng The rho-theta technique involving compass and speed log readings is still an important procedure in marine navigation. Ship navigators should always compile a detailed dead reckoning (DR) plot on a chart. In fact, DR works even when radio navigation fails and bad weather renders visual techniques impossible. The major difficulty of the rho-theta technique is its susceptibility to drift caused by leeway and current. These effects have to be estimated, bringing forth that DR is never free of assumptions. An alternative to the rho-theta technique is the use of an inertial navigation system (INS). However, INSs are rarely found on ships. except of submarines, where the use of an INS is vital. Terrestrial position fixing Various methods for terrestrial position fixing are applied by mariners. Observables are mainly bearings and distances. The highest accuracy is achieved with visual bearing measurements. Nonsimultaneous observations are processed by running fixes (Sect. 6.3.2). If the sea ground is not too flat, depth is also a valuable information for position fixing. The measured depth may be interpolated between the depth isolines plotted in maritime charts providing to a line of position (LOP) for horizontal positioning. In many cases, different sources of information are blended and the vessel position is determined by a generic fix. The solutions are often obtained graphically by plotting (or identifying) the LOPs in the chart, requiring that observed landmarks must be included in the chart. Apart from natural landmarks or nian-made characteristics, marine navigation uses a number of dedicated aids to navigation. According to U.S. Coast Guard definitions, an aid to navigation is "any device external to a vessel or aircraft intended to assist the navigator to determine position or safe course, or to warn of dangers or obstructions to navigation". Types of aids are lights and lighthouses, buoys, beacons, and sound signals. (Radio navigation aids are described below.) Visual aids to navigation are dominant. Some of them are also equipped with sound signals, especially in areas where fog occurs frequently. A detailed description of short-range aids to navigation is found in National Imagery and Mapping Agency (1995: Chap. 5). 364 16 Application examples Celestial navigation Navigation with reference to celestial objects is still common in marine navigation. Although largely replaced by radio navigation, navigators on large ships must still be familiar with the sextant. Celestial navigation is the only means for determining accurate position fixes in mid-ocean areas if radio navigation fails. For further details see Chap. 7. Depth measurements All marine navigation techniques should be accompanied by depth measurements preventing the vessel from going aground. Depth soundings must consider the vertical reference of the chart, i.e., the reference height (or height datum) used for the depth contours. The conventional choice is the mean lower low-water (MLLW) level being an average of the lower of the two low tides per day over a period of several years. Besides, tide tables should be considered in shallow waters. Significant deviations between charted depths and soundings require a careful check of the vessel position. Onboard radar Many of today's vessels are equipped with onboard radar equipment. A recent version is known as automatic radar plotting aid (ARPA). The main applications of onboard radar are position fixing and collision avoidance. Position fixing is supported by radar reflectors mounted on signals and by radar beacons (see below). Radar offers significant benefits in areas where fog occurs frequently. Drawbacks of radar are related to direction quantization difficulties in close-range tracking which may be overcome by synthetic aperture radar (SAR) that uses increased exposure times but increases accuracy by measuring the Doppler frequency shift of the radar pulses (Mikhail et al. 2001: Sect. 11.6). Another option for close-range applications are laser scanners (Sandler and Gilles 1995). Radio navigation aids Maritime radio beacons These navigation aids operate in the LF /MF band and belong to the point source radio navigation systems. Maritime radio beacons are nondirectional and allow for bearing measurements when using direction-finding equipment aboard the vessel. Traditionally, radio beacons have been used for homing, i.e., for steering into the direction of the beacon. Beginning in the 1990s, many existing radio beacon networks have been modified for the transmission of DGPS corrections. 16.1 Conventional applications 365 Radar beacons In contrast to radio beacons, radar beacons transmit pulsed signals and operate in the UHF domain. To use these beacons, radar equipment must be installed aboard the vessel. Two types of radar beacons are distinguished. The radar marker beacons (RAMARK) permanently transmit radar signals and provide bearing information only. In contrast, the radar beacons (RACON) are a realization of secondary radar where the beacon must be triggered by the onboard equipment of the vessel. RACONs provide both bearing and distance information. Loran-C and GPS The original use of Loran-C in marine navigation was based on the hyperbolic LOPs provided by the system. The LOPs for certain time differences were plotted on charts allowing to interpolate the actual position of the vessel by intersection of the respective hyperbolas. Modern Loran-C receivers involve navigation computers that not only calculate the current position of the craft but also provide for waypoint navigation by indicating the course to steer (CTS), the distance to destination, etc. Since the mid-1990s, Loran-C has been replaced by GPS on board of vessels. GPS receivers provide similar information as Loran-C receivers but with increased accuracy (especially since SA has been switched off) and on a global basis. In coastal and harbor areas, DGPS services (e.g., based on maritime radio beacons) further improve the accuracy and integrity of the system. Note that even when using radio navigation and electronic navigation computers, attentive watching and the use of charts are indispensable for the mariner. Publications Marine navigation uses charts extensively. The contents of these charts concentrate on the needs of the mariners (coastal areas, depth information, aids to navigation, etc.) (see Sect. 5.2). Sailing directions and coastal pilots are text publications comprising additional information about marine navigation not shown in charts. These publications describe general features of the ocean basins as well as detailed characteristics of coastlines, and harbors, and are used as planning guides. Another important type of publication are light lists. Considerable updates to the various publications are announced in the notices to mariners on a regular basis. The notices to mariners also include relevant information about aids-to-navigation discrepancies and changes, hazards to navigation, and other important developments or current specific situations. 366 16.1.3 16 Application examples Aeronautic navigation The users of aeronautic navigation comprise commercial airlines, general aviation (private use), and military users. While many commercial airlines tend to use large and heavy aircraft, general aviation mainly implies small and light-weight aircraft. Different aircraft types (and also helicopters) often require different flight procedures in general and different navigation procedures in particular. This section provides an overview of current aeronautic navigation techniques. Airspace The airspace is divided into two major categories, i.e., regulatory and nonregulatory airspace, the latter being restricted to military use. Within the two categories, controlled, uncontrolled, special-use, and other airspace are distinguished. The categories and types differ by the "complexity or density of aircraft movements, the nature of the operations conducted within the airspace, the level of safety required, and national and public interest" (Federal Aviation Administration 2002a: Chap. 3). Of major interest for navigation is the separation between controlled and uncontrolled airspace, the first being permanently monitored by air traffic control (ATC) (see Sect. 15.4). The lower airspace between 1000 and 18000 ft provides a dense network of airways supplied with radio navigation aids - mainly VHF omnidirectional range (VOR) and distance measuring equipment (DME) ground stations. The airways are primarily defined according to topographic characteristics and contribute to an increased traffic safety and convenience for the pilots. When using an airway, the pilots must comply with certain regulations and must inform ATC at regular intervals about their current position. Every leg of an airway in lower airspace is characterized by a minimal en route altitude. The upper airspace is divided into flight levels (FL) that are given in hundreds of feet; FL 250, e.g., corresponds to an altitude of 25000 ft above mean sea level (MSL). Different FLs are used for certain flight directions. For the purpose of vertical aircraft separation, the realization of the FLs with barometric altimeters is based on the parameters of the standard atmosphere. The upper airspace between FL 180 and FL 450 involves an own network of airways denoted as jet routes. The jet routes have a reduced density compared to the airways of the lower airspace. Every aircraft approved for flight at these heights may use jet routes, i.e., also any approved non-jet aircraft (Clausing 1993: Chap. 4). Note that aviation strictly distinguishes between the terms elevation, height, altitude, and flight level. Elevation refers to vertical distances of 16.1 Conventional applications 367 terrestrial objects (like airports) above MSL, height is the vertical distance from the terrain, and altitude is the vertical distance of an aircraft from MSL (Stewart 1992: p. 132). Visual and instrument flight rules Generally. aeronautic applications are separated into flights based on visual flight rules (VFR) or instrument flight rules (IFR). The VFR govern the procedures for conducting flight under visual conditions. These conditions are denoted as visual meteorological conditions (VMC) and are expressed in terms of visibility, distance from cloud, and ceiling equal to or better than specified minima. Basic VFR weather minimums are described in Federal Aviation Administration (2002a: Sect. 3-1-4). In visual flight, the pilots must be able to see the earth during the whole flight; they have to heed the air traffic in their vicinity, and they are responsible for collision avoidance. The flight heights are chosen according to international regulations. VFR flights at night time are only allowed with special permission. VFR airports close at night falL The IFR are a set of rules describing the conduct of a flight under instrument meteorological conditions (IMC). The IMC are weather conditions that are worse than the minima specified in the VMC. Bad weather conditions include clouds, rain, fog, snow, smoke, smog, or other visual obstacles. In instrument flight. the staggering of aircraft along specified air traffic routes is done according to their positions. This is the responsibility of ATC. IFR also apply at night and in controlled airspace despite the weather conditions. Commercial aircraft mostly operate within controlled airspace. Thus, the pilots are obliged to submit a detailed lineup of the planned flight to ATC, they are subject to ATC instructions and clearances, and certain radio equipment must be carried. IFR flights usually cover larger distances und must be planned more carefully, especially concerning fuel consumption. Furthermore, every IFR pilot must undergo an instrument rating on an annual basis. The rating is performed in a flight simulator and investigates the qualification of the pilot for performing flights within the limits laid down for instrument flights. Flight procedures differ between flight along defined airways and pointto-point navigation usually denoted as area navigation (RNAV). While the use of airways is usually performed according to IFR, RN AV is mainly applied in visual flight in uncontrolled airspace. Navigation techniques One method for grouping navigation techniques is to investigate the responsibility for the navigation of an aircraft. Until about the 1960s or 1970s, 368 16 Application examples traditional navigation of large aircraft involved the navigator as an own member of the flight crew. With the further development of navigation techniques (especially with the introduction of inertial and radio navigation), the pilot took over the duties of the navigator. The latest step is the introduction of computer navigation to aviation so that today many tasks are fulfilled by autopilots. Another classification is based on the navigation technique applied, including autonomous (onboard) navigation, radio navigation, and groundbased surveillance by means of radar. Every navigation technique is complemented by visual navigation whenever possible. Autonomous navigation Dead reckoning In aeronautic navigation, DR is mainly performed by pilots of general aviation. The pilot plots the track of the aircraft onto a suitable aeronautic chart. The basic measurements are the (magnetic) heading of the aircraft and true airspeed. Plotting these measurements onto the chart yields the air plot. Considering an estimate of drift due to wind, the DR plot is derived from the air plot. Wind computations have originally been performed with the analog air computer. Today, digital calculators gradually replace these mechanical devices. The DR plot is used to keep up a rough estimate of the aircraft position. DR is suitable for RNAV of light aircraft in VMC. In addition, DR may prove useful if radio-based equipment fails. The accuracy of DR is limited by the nondeterministic character of wind causing drift. Thus, after extended time intervals, the DR estimate is updated by more accurate position fixing techniques on the basis of LOPs. In many cases, position fixing involves nonsynchronous measurements. If the earlier LOP is advanced (or the latter LOP retired) to account for the change of position between the observations, the position of the aircraft is determined by a running fix (see also Sect. 6.3.2). Celestial navigation Prior to the introduction of INS (and GPS), celestial navigation was the only means to determine the position of the aircraft in remote areas like deserts or over mid-ocean areas where no radio navigation infrastructure (like VOR/DME or Loran-C) was available. Originally, astronavigation on board of an aircraft required the use of a sextant specifically modified for airborne use (Stewart 1992: pp. 99-100). Each star observation provided a LOP and the position was determined by a running fix. The workload for 16.1 Conventional applications 369 the navigator was considerably high, urging position fix intervals of around 40 minutes. In the meantime, the combination of celestial, inertial and imagebased navigation has led to the development of the star tracker that provides highly accurate navigation information in an autonomous manner (Sect. 7.4). Inertial navigation These techniques were introduced to aeronautic navigation beginning in the 1960s. Due to the still high costs of INSs, such equipment is mainly available in large civilian and military aircraft. The navigation computer of an INS continuously calculates the state vector of the aircraft. The INS output information is also used for the stabilization of the artificial horizon which is one of the primary flight instruments (Stewart 1992: Chap. 6). Often, three systems are installed in parallel for safety reasons. If a single system fails at a time, it may be correctly identified and excluded. (This principle is also applied for other aviation equipment.) Inertial navigation is an integral component of modern autopilot systems allowing to fly an aircraft over extended distances without the requirement for external information. The INS may be part of a complete flight management system (FMS) that also supervises the fuel consumption and the control and display units of the aircraft. An FMS is a complete management system for performing automatic long-range flights between selected airports. Details about actual procedures have to be inserted by the pilot. Navigating an aircraft equipped with INS is not necessarily performed along airways but allows to apply RNAV principles. Thus, the aircraft may be steered along orthodrome courses, often leading to a reduction of flight distance and duration. However, the actual route is subject to ATC instructions and clearances. Since INS is subject to a steady increase of positioning errors, frequent updating with radio-based systems is required. The pilot may enter the positions of radio navigation aids (like VOR/DME) along the planned route into the navigation computer which may be used for automatically updating the INS. More recently, INS is often complemented by GPS (Sect. 13.4.2). Furthermore, barometric altimetry may be used to stabilize the vertical direction (Tazartes et al. 1997: Sect. 7.5.3). The use of INS relieves the workload of the pilot. More precisely, the pilot's duties are shifted towards flight management and controlling of the autopilot facilities. Radio navigation Radio navigation systems for aviation may be separated into en route systems for. airway or area navigation and approach guidance systems. 370 16 Application examples Airway radio navigation These systems are point source systems that have been developed for en route navigation along airways where navigation means to pilot from one beacon to the next. The first type of radio beacon for aeronautic use was the nondirectional beacon (NDB). Several drawbacks ofthis type of beacon (which are mainly due to propagation characteristics of LF /MF signals) led to the development of VOR beacons starting in the 1950s. Today, the VOR beacons are widely available in dense networks. Most VOR stations are collocated with DME ground facilities providing both direction and distance information along the airway (rho-theta fixing) for suitably equipped aircraft. VOR stations may be used for theta-theta fixing. If two receivers are available on board of the aircraft, simultaneous measurements are possible. Otherwise, running fixes may be performed. DME is mostly applied for instrument flight and is required from FL 240 upwards. Several DME stations may be used for rho-rho fixing. Furthermore, DME may be used to compute the ground speed of the aircraft. Note that DME is affected by the difference between the actually measured slant ranges and the desired horizontal distances. Area-based radio navigation Despite the traditional navigation along airways, aircraft may be steered by applying RNAV. When leaving an airway, navigation by VOR/DME requires the use of a course-line computer to numerically calculate the aircraft position from the VOR and DME LOPs via trigonometry. This is a significant difference compared to airway navigation, where simplified techniques may be used to determine the position of the aircraft along the airway. Note that the detouring caused by navigation along airways is only in the order of 7% (more for short flights, less for longer flights). A major advantage of area-based navigation systems is that detailed navigation information is permanently available, e.g., the distance to destination, the estimated time of arrival, or the across-track deviation from the planned route. These techniques also allow to correct for the effect of drift at any instant. Prior to the introduction of GPS, Loran-C was largely used for navigation over oceanic areas such as in the northern Pacific and Atlantic. Furthermore, Loran-C was broadly applied by general aviation before GPS was available. In some regions, GPS is approved for civil aviation use in correspondence with INS, e.g., in remote or oceanic areas (2001 FRS: Sect. 2.2). The use of GPS supports automatic dependent surveillance (ADS), where information about the aircraft trajectory is permanently forwarded to ground control centers and other aircraft. 16.1 Conventional applications 371 Approach guidance Besides the visual approach (that can be performed only by light aircraft, during daytime. and under adequate weather conditions), approach procedures are flown by the pilot with reference to instruments. Direction and height are of principal importance for the approach; distance information is less important. Some systems- especially instrument landing systems (ILS)also allow to perform automatic landings at selected airports on the basis of autopilot control, which is advantageous under poor visibility conditions. However, automatic landing procedures are only possible at maximum cross wind speeds of 15 knots (about 28 km h -l). Otherwise, the aircraft must be steered and flown by hand. Approach guidelines usually involve four subphases (Clausing 1993: Chap. 8): initial approach (transition from enroute travel to approach), intermediate approach (flight towards the main radio navigation aid used for the approach), final approach (guided phase of the flight roughly until the beginning ofthe runway), and missed approach (to be conducted if the visual conditions are too poor for the selected approach procedure at the missed approach point or if there are any unexpected obstacles on the runway). Approach procedures are divided into nonprecision approach (NPA) and precision approach of different categories. NPA may be realized by NDBs or VOR beacons. Other options may use Loran-Cor GPS. Conventional NPA does not include vertical guidance, although NPA procedures with vertical guidance have also been defined. Precision approach is inevitable under poor visibility conditions. Minimum visibility requirements for the different categories of precision approach are listed by Stewart (1992: p. 142). Presently, the system used mainly is the ILS, providing both course and vertical guidance. Runway distance is either indicated by marker beacons or measured by DME. A modernized alternative is the microwave landing system (MLS). In the future, satellitebased approaches may be performed by satellite-based augmentation systems (SBAS) mainly for NPA, or ground-based augmentation systems (GBAS) for precision approach. The planned use of GNSS augmentation systems as an integral component of aeronautic navigation is expected to cause a significant change to current operational procedures (e.g., curved approaches may become possible). Radar systems Radar is mainly used for instrument flights but may also support visual flights. Primary and secondary radar systems are distinguished. A primary radar system follows the "echo" principle, i.e., passive reflections of the radar 372 16 Application examples signals are recorded. The main problem of primary radar systems is that other objects like buildings or topographic features also cause echoes. Moreover, the required transmission power is very high, whereas the strength of the received signals is usually very low. The radar pulses must be very short and the echoes must be received in the "idle" period between two successive transmissions. Examples for primary radar systems are onboard weather radar (operating at very high frequencies to achieve reflections by aerial particles) and precision approach radar (PAR) systems that are sometimes used to control the precision approach and departure of aircraft in bad weather conditions. Further, the radio altimeter present in many modern aircraft operates after the same principle. The drawbacks of primary radar are overcome by secondary radar systems sometimes denoted as secondary surveillance radar (SSR). Aircraft equipped with a radar transponder (i.e., a combined receiver-transmitter that automatically responds to incoming queries) actively transmit answers to the ground radar station. Thus, the pulses received at the ground station are much stronger than compared to the primary radar. The answering pulses are usually transmitted at a different frequency to avoid confusion with echoes. Another advantage is that the active responses may be modulated with additional information like an aircraft identifier, the flight height, speed, etc. The transmission of additional information solves the difficulty of aircraft identification experienced by primary radar systems. A certain identification query results in a more significant light of the response on the radar screen. (In primary radar, aircraft identification may require the performance of certain maneuvers as instructed by the radar controller.) The use of airborne radar transponders is increasingly demanded by ATC. The guidance of an aircraft by means of radar is known as radar vectoring. Possible applications include staggering of aircraft (e.g., when approaching an airport), ordering of aircraft along airways, direct courses for certain aircraft to avoid congested airways, vectoring to support visual navigation, and support in emergency situations. Such an emergency situation may occur if a VFR flight is unintentionally hindered by clouds due to sudden weather changes. Thus, radar vectoring may be used to safely guide the aircraft back into a VMC area. The use of radar by ATC is different in many countries. For example in Europe, radar is mainly used to monitor aircraft along the routes. In the USA, the emphasis is more on radar controlling, which is mainly caused by the very high arr:tount of air traffic. 16.1 Conventional applications 373 Onboard radar Such radar equipment is mainly used for monitoring weather conditions. Alternatively, the equipment may be tilted to point down to the earth. This technique may be used for flights over larger water areas where coast lines or islands may be identified in the radar image. With this information and aeronautic charts available, the pilot may determine the aircraft position relative to such landmarks. Publications Aeronautic charts are designed according to the needs of aircraft pilots (see Sect. 5.2). Approach procedures for larger airports are explained in specific approach maps. Notices to airmen (NOTAM) are regularly published to inform the pilots about up-to-date situations in the airspace concerning weather, traffic situation, etc. According to the International Civil Aviation Organization (ICAO), NOTAM contain "information concerning the establishment, condition, or change in any aeronautical facility, service, procedure, or hazard, the timely knowledge of which is essential to personnel concerned with flight operations". NOTAM are distributed by telecommunication or by any other suitable means. Different types of NOTAM have different life and update cycles. Further information is given in Federal Aviation Administration (2002b). 16.1.4 Space navigation In the past, space affairs have been a major interest of national policies of the "space nations" (mainly the USA and the former Soviet Union). Today, a transition from military to civil use can be observed. In parallel, a shift ftom research to everyday use of spacecraft is taking place. Other nations have established national space institutes (like several European and Asian countries) or even multinational space agencies, e.g., the European Space Agency (ESA) with fifteen European member states and Canada as an associate. Undoubtedly, space navigation is also influenced by these developments. The application spectrum of space navigation involves the determination of the orbit (i.e., position and velocity) and attitude of spacecraft, as well as formation flights required for precise spacecraft maneuvers. These maneuvers include orbital rendezvous, docking or landing, or even coordinated orbital paths of space vehicles. Orbital rendezvous are needed for multispacecraft missions, e.g., for supply purposes of the International Space Station (ISS). Coordinated orbital paths may be adopted for remote sensing applications 374 16 Application examples like stereoscopic imaging. One example is the combination of synthetic aperture radar (SAR) images recorded by a pair of satellites in coordinated orbits (Mikhail et al. 2001: Sect. 11.11). Further examples of space navigation are listed in the 2001 FRS, Sect. 2.4. The requirements of space navigation mainly depend on the type and orbit of the spacecraft. For launch vehicle missions like the U.S. Space Shuttle, all phases of space navigation have to be considered (including the launch, on-orbit, reentry, and landing phases). For earth-orbiting satellites, the main focus is the on-orbit phase. A significant distinction arises from the orbital altitude of the spacecraft. For low earth orbit (LEO) satellites, orbit determination is nowadays routinely supported by or even exclusively based on GPS. Some spacecraft even use GPS for attitude determination (otherwise a domain of INS or star trackers). The number of satellites launched with onboard GPS receivers is steadily increasing. While in 1991 only a single new satellite carried a GPS receiver, in 1999 the number of launched satellites equipped with GPS receivers had already grown to almost 40 (Rush 2000). For medium earth orbit (MEO), geostationary earth orbit (GEO), and high earth orbit (REO) satellites, the use of GPS is limited by the signal transmission characteristics of the satellite antennas (i.e., the beam coverage patterns). However, there are ongoing tests to support such missions by GPS-based orbit determination (Moreau et al. 2000). The advantages of GPS tracking compared to ground-based tracking include a cost reduction due to the lower requirements on terrestrial infrastructure, an accuracy improvement of the orbital parameters, the independence of ground-based control, and the possibility of realizing more versatile applications. When performing measurements between satellites, the term satelliteto-satellite tracking (SST) is applied. Using GPS for spacecraft in lower orbits is known as high-low mode. Alternatively, measurements may also be performed between different LEOs (low-low mode). These methods are also applied for gravity field determination missions in geodesy (Sect. 16.3.1). There are several options for ground-based orbit determination. One technique is satellite laser ranging (SLR) which requires that the satellites carry retroreflectors. Although the achieved accuracy is in the centimeter range or better, the drawback of SLR is its weather dependence since laser light does not penetrate clouds. Alternative techniques based on radio frequency (RF) signals include the French Doppler orbitography and radiopositioning integrated by satellite (DORIS) system and the German precise range and range-rate equipment (PRARE). In case of DORIS, the satellites carry an additional payload performing Doppler measurements of the signals transmitted by ground-based stations. Two signal bands at 400 and 16.2 Specific applications 375 2000 MHz are used to correct for the effect of ionospheric refraction. The orbit computations are carried out by a mission control center. The ground segment involves a total of about 50 stations. Radial orbital accuracies of 10 cm are available in postprocessing; real-time accuracies are in the meter range (http:/ /smsc.cnes.fr/DORIS). In case of PRARE, the dedicated satellite payload transmits signals to a set of ground stations that retransmit the signals back to the satellite. Thus, two-way range measurements and also Doppler measurements are possible. The downlink involves two frequency bands at about 8500 and 2250 MHz. Dual-frequency measurements allow to correct for ionospheric refraction. The uplink is based on a single frequency band at about 7225 MHz. The PRARE signals are modulated with pseudorandom noise (PRN) codes for range determination. The satellite positions may be determined with an accuracy of about 5 cm in postprocessing. Similar to DORIS, PRARE is mainly used for scientific missions (http:/ /op.gfz-potsdam.de/prare/index_PRARE.html). In case of interplanetary research missions, the previous techniques cannot be applied (except maybe for the ground launch phase). For such applications, the use of autonomous navigation techniques is required. Orbit and attitude determination are based on the use of star trackers integrating celestial, inertial, and image-based navigation techniques (Sect. 7.4). 16.2 Specific applications Besides the conventional applications of navigation covered so far, there are specific applications that reach beyond the primary aims of navigation. The issue addressed in this section is the integration of a navigation system or of some of its components with other - mainly information - technologies, resulting in a multifunctional information system. Examples of specific navigation applications based on such information systems are pedestrian navigation (being largely user-tailored), indoor navigation (characterized by a highly demanding environment), mobile mapping (combining navigation with imaging and georeferencing), location-based services (integrating navigation with communication and information), and mobile robotics (complementing navigation by computer science and mechanical engineering). These applications are briefly treated below. 16.2.1 Pedestrian navigation Traditionally, navigation implied the guiding of vehicles from a starting point along the most suitable route to a defined destination. Beginning with maritime applications, navigation has conquered air and land traffic and has be- 376 16 Application examples come an indispensable tool in the traffic and transport domain. Currently, an increasing penetration in daily life may be observed. In-car navigation systems, previously luxurious and expensive, have become broadly accepted tools of land navigation. This development would not have been possible without GPS as a highly accurate system free of charge. The trend towards the general use of navigation systems in private cars continues; and the next step of these developments is probably pedestrian navigation: accurate and reliable navigation information will be provided directly to the human beings. In this sense, navigation will only be one (rarely noticed) part of some kind of mobile geoinformation services where the knowledge of one's position is the key for accessing the information required. This is the principle of location-based services (LBS) that will likely play an important role in the upcoming information society. Specific features of pedestrian navigation Pedestrian navigation is characterized by several specific features mainly related to the high level of mobility of human beings. Pedestrians move in very diverse surroundings ranging from open areas to narrow urban and indoor environments. They change direction and walking speed depending on traffic, hurry, interest, and mood (to name but a few). In known environments, route planning and optimization is decided by experience, topographic and topological knowledge. For positioning techniques, the habits of pedestrians pose problems that may only be solved by integrated navigation approaches. Consider the use of a hand-held GPS receiver. Such devices may be sufficient for hikers or other leisure activities in open areas. However, for applications like the management of search and rescue (SAR) emergency operations, the requirements on positioning accuracy, availability, and reliability are more difficult to fulfill. In urban areas, pedestrians rather move along sidewalks than in the middle of a street. The consequence is an increased impact of satellite signal blocking by the buildings along the sidewalks. Furthermore, conventional GPS receivers cannot be applied for indoor areas. Although assisted GPS (A-GPS) techniques, i.e., the provision of GPS ephemerides via mobile communication links to accelerate receiver signal acquisition, and improved signal tracking strategies are currently under investigation (Diggelen and Abraham 2001), the benefits of such approaches for indoor use are questionable. Another problem is the increased level of multipath signal propagation in urban areas or inside of buildings. With respect to route planning and guidance, the high level of human mobility requires the use of very detailed and up-to-date map data since even the smallest passages are used by pedestrians. In addition, inside of 16.2 Specific applications 377 multistory buildings, three-dimensional models are more suitable than conventional two-dimensional maps. Take the SAR example of a fire brigade rescuing people from a burning building. Where smoke and the loss of electricity are likely to affect visual orientation and navigation, pedestrian navigation systems might allow an efficient and effective operation planning by guiding the rescue teams as safely as possible within the building. Examples of pedestrian navigation systems Despite the availability of hand-held GPS receivers that also include map support for navigation, there are only a few prototypes of integrated navigation systems for pedestrians. These prototypes mainly concentrate on the positioning component; the specific situation of pedestrian routing has rarely been treated. The majority of existing prototypes are based on the integration of GPS with some kind of DR approach (e.g., Levi and Judd 1996, Talkenberg 1999, Ladetto et al. 2000, Legat 2002). The GPS receiver is the primary navigation sensor. The DR component is either realized by compass measurements together with a step-counting mechanism (rho-theta technique) or by an INS adapted to the needs of human motion. Height support is often gained from barometric altimetry. Under good satellite visibility conditions, the DR data are continuously calibrated using GPS. In case of GPS outages, DR is responsible for positioning. Due to the self-contained character of DR, such systems may be used in most pedestrian environments. However, extended periods of limited GPS visibility are problematic due to the drift effects inherent in DR. Although these approaches may fulfill the needs of many applications, further developments are necessary to achieve a solution that satisfies the stringent needs of safety-of-life applications like SAR. The specific situation of indoor navigation is further treated in the next section. 16.2.2 Indoor navigation Navigation within buildings is closely related to pedestrian navigation and mobile robotics. In case of pedestrians, a seamless transition between indoor and outdoor areas is most important, i.e., pedestrian navigation systems should deliver accurate and reliable navigation information regardless of the current environment. In contrast, mobile robots often remain within predefined operation areas where the controlling of the robot movements is an additional task. Many indoor navigation tasks are characterized by high accuracy requirements of only a few meters or better. Thus, the question arises, whether ex- 378 16 Application examples isting navigation systems may fulfill these requirements. Conventional radio navigation systems are not very well suited for indoor use. Although strategies for indoor GPS reception have already been developed, the performance appears insufficient. LF signals used by Loran-C may penetrate indoor environments, but the accuracy is too low. The use of cellular communication systems for positioning is limited by multipath propagation and network geometry. Autonomous navigation techniques are an option but require frequent updates due to position drift. Hence, a number of dedicated indoor navigation systems have been developed. The principles of some solutions are discussed below. Examples of dedicated indoor navigation systems Track-based navigation is a straightforward approach for vehicles or robots that only move along defined paths, i.e., along given tracks. In this case, position determination becomes a one-dimensional problem. Only the arc length along the track is required to derive the position of the vehicle or robot, which may be achieved by means of beacons, odometry, or other techniques. The major drawback of such arrangements is their low flexibility. Tagging systems are based on a unique identification of each vehicle, robot, or even human being to be navigated. In many cases, infrared communication is used: a network of infrared beacons is installed at known positions within the area of interest. The mobile "object" carries another infrared beacon. When the mobile beacon is in line of sight with one of the fixed beacons, it may be identified and its position is known to be close to the position of the fixed beacon ("proximity positioning"). This technique is similar to cellbased positioning performed within mobile communication networks. The mobile beacon may either actively communicate its identifier to the fixed beacons or it may be passively read out by the fixed beacons. Radio-based systems for indoor use may rely on a network of synchronized radio transmitters located in close vicinity of the area of interest. The mobile unit receives the signals from the transmitters and determines its position via pseudorange measurements (self-positioning). In some applications, the transmitters are designed as GPS pseudolites (pseudosatellites) with a GPS-like signal structure. The problem of such realizations is the near-far effect, meaning that the signals of the closest transmitter are usually received most strongly. Large differences in the received signal strength could cause the signals of the other network transmitters to be rendered unusable. Therefore, pseudolites are often operated in pulsed mode with an asynchronous transmission of the pulses. This avoids the problem of simultaneous reception of the signals emitted by different transmitters and suppresses the near-far effect. In a different concept, the mobile unit acts 16.2 Specific applications 379 as a transmitter and the fixed stations receive the signals emitted by the mobile unit (remote positioning). An example of such a system is presented by Peterson et al. (2000). Image-based navigation systems are well suited for indoor applications. Since the operation area is usually known and limited, remote positioning using a fixed sensor configuration may be applied. Besides, indoor environments are often characterized by unique structures which also facilitate image-based self-positioning. While remote positioning will typically provide improved performance, self-positioning requires less infrastructure and offers iucreased flexibility of the application. Finally, ultrasound systems are mentioned. The principle of such systems is the same as applied by sonar (sound navigation and ranging): a mobile transceiver emits a sound signal and receives the signals reflected by the surrounding. Observables include the run time of the sound signal (distance measurement) or the frequency of the reflected signals (Doppler-based velocity measurement) Ultrasound may be used for collision avoidance of mobile robots where a rotating sound signal is emitted to determine possible obstacles in the local vicinity of the robot. In a similar manner, laser scanners may be used. 16.2.3 Mobile mapping The main task of a mobile-mapping system is not primarily navigation, although positioning plays a dominant role. In fact, such a system aims at positioning of a moving platform which carries sensors for georeferencing certain objects within the surrounding infrastructure. For this reason, mobile-mapping systems are also called inventory systems. Mobile mapping represents a heterogeneous type of sensor integration consisting of navigation sensors as well as imaging sensors, altogether time synchronized and mounted on a common platform (Schwarz and El-Sheimy 1996). Figure 16.1 reflects the basic system structure and outlines some products. products mobile platform georeferencing navigation sensors imaging sensors ~ a Fig. 16.1. Structure of a mobile-mapping system digital maps images, videos 380 16 Application examples Components of a mobile-mapping system Navigation sensors Depending on the performance requirement, either a GPS/INS integration is used or a GPS multiantenna array may be sufficient. As described in Sect. 13.4.2, in the case of GPS/INS integration, GPS controls the low accuracy ofiNS over long time intervals and INS bridges GPS signal loss due to shadowing. In addition, INS determines the platform attitude, i.e., its orientation in three-dimensional space. In case of a GPS multiantenna array, GPS is responsible for the determination of both the position and the attitude. Imaging sensors A wide spectrum of imaging sensor systems is in use, like optical or digital cameras (typically clustered), multispectral or laser scanners, interferometric radar systems, and many others. For more details on digital imaging cameras see Sect. 12.1.4. In addition, supplementary information may still be recorded with analog video cameras. In any case, the exterior orientation of the imaging sensors is gained by the navigation sensors described before. Georeferencing As one of the main tasks of mobile-mapping systems, georeferencing is defined as the procedure of transforming mainly three-dimensional coordinates, obtained from measurements in the image frame, to a mapping frame where the results are required. Processing is usually performed via a body frame representing the moving platform, a local level frame, and a global coordinate frame, whereas the latter represents, e.g., an earth-centered-earth-fixed (ECEF) frame. In the mapping frame, single georeferenced target points or georeferenced digital images are achieved. As a consequence, a set of georeferenced objects are obtained which may be processed by automatic or semiautomatic feature extraction out of images. These georeferenced objects are input elements to a geographical information system (GIS) or are arranged to a digital map. Realizations and outlook Three more mobile-mapping developmental aspects are mentioned. First, mobile mapping systems are not restricted to land-based applications and have essentially pushed forward airborne photogrammetry and mapping. Second, inventory systems gain additional importance if they perform real-time mapping justified by emergency applications, environmental monitoring, etc. 16.2 Specific applications 381 Finally, inventory systems may be equipped with other than typical imaging sensors and may therefore serve a lot of different applications. Precision farming is one possible example: appropriate sensors are used to classify georeferenced sections of agricultural land; that enables farmers to treat individual parts of the field differently (e.g., by adjusting the amount offertilizer used per area section) and, therefore, helps them to optimize crop and productivity. 16.2.4 Location-based services Simply defined, a location-based service (LBS) is an online geoservice. More precisely, an LBS provides a position- or location-related (geographic) information or service to a mobile user via a communication link. As the name indicates, in most cases the user's location relative to the surrounding objects is involved, rather than the user's position. An LBS is essentially based on the interaction of three distinct components: navigation, information, and communication (Fig. 16.2). The term LBS is a recent dictum in today's upcoming information society, although LBS has already experienced a relatively long-lasting development. As a traditional and representative example, consider an up-to-date vehicle navigation system which provides location-based guidance instructions to the driver regarding real-time traffic information reported by RDS (radio data system) or TMC (traffic message channel). Recently arising LBS applications are health care services involving an emergency center, ambulance field teams, and certain groups of patients. The center permanently controls several health status parameters of the patients communicated via a suitable link using a monitoring system. If one of the parameters exceeds its tolerance limits, an ambulance field team is automatically asked for support via an emergency call. This example will be treated in more detail below. navigation LBS information communication Fig. 16.2. Components of an LBS 382 16 Application examples Aspects of navigation An LBS requires many navigational tasks. First, location data are often required with a high quality regarding performance parameters. In the mentioned example, the locations of the patients play an important role to supply them with medical support as fast as possible. In the USA, a binding directive for wireless emergency services has been issued. This E911 directive requires wireless carriers to provide precise location information within 50-100 m in most cases (Federal Communications Commission 2001). In addition to positioning, routing and guidance are intrinsic properties of an LBS. Again, in case of the health care service, the ambulance field team has to be supplied with guidance instructions following an optimal route to the patient's location. Aspects of information and communication An LBS has to deal with related problems like "which objects are available in the vicinity?", "where are those objects located that are of particular interest?", etc. This requires the use of a GIS at the service provider's site. Thus, the information depth ranges from basic data to full internet support with respect to database queries and GIS analysis functions. To meet full LBS capability, brokers offer client access to multiple servers and databases on demand and on the fly. The LBS users are not only mobile users but also multimodal users (regarding different means of transport). This should not restrict their full access to LBS. The complexity of an LBS is demonstrated by the example of the health care service since diverse types of information have to be exchanged among the involved parties. Health status parameters and the patient's location have to be reported to the center, which, in addition, monitors the position and status of each field team. Finally, the ambulance team with the most suitable location with respect to the patient is supplied with an emergency call and with guidance instructions on the way to the patient. Considering the kind of information exchanged, three basic types of LBS are distinguished: • Information services provide the user with information about the surrounding (e.g., where is the nearest free parking lot?). • Interaction services allow data exchange with other users or clients (e.g., when does the ordered taxi arrive?). • Mobility services deal with tasks of routing and guidance (e.g., how to go to the airport and when to leave for the airport to arrive there in time?). 16.2 Specific applications 383 At present, LBSs are facing the problem that the range of possible applications is much wider than industry is able to offer. However, powerful communication technologies like UMTS are in the implementation phase right now. This circumstance should give the telecommunication service providers the possibility to offer a much broader spectrum of LBS in the near future due to the tremendously increased data rates supported by UMTS. Furthermore. a lot of fine-tuning has still to be done concerning user interfaces adapted for wearable devices like cellular phones, pocket PCs, or palmtops. The latter two are denoted as personal digital assistants (PDA). Finally, protocols and standards have to be further developed on an international basis. Currently. this happens within a dedicated ISO task committee. Application fields and outlook Selectively, Legat (2002) gives the following examples from the wide variety of LBS applications: • safety-of-life operations (performed by ambulance, fire brigade, police, etc.), • SAR services (e.g., in mountainous areas affected by avalanches or in regions affected by environmental disasters like floods or earthquakes); • health care services (e.g., monitoring people suffering from heart diseases). • services for handicapped people (e.g., blind or visually impaired persons): • traffic and transport (e.g., vehicle navigation, dispatching); • tourism (e.g., sightseeing, personal travel assistance); • leisure activities (hiking, biking, sailing, etc.); • military operations. Judging from the above applications, today's information society seems to be subject to a change of paradigm. Till now, the human individual was seeking for a communication link anywhere and at any time. From now on, unrestricted access to information at any place is desired. From the user's point of view, the vision of an ideal LBS includes portability of an all-in-one system, disposal at any time and at any place, and ideal compliance with individual requirements. Consider an LBS for a blind or visually impaired person: besides its conventional features, the LBS should try to compensate parts of the user's handicap by imitating spatial cognition and reasoning of human beings. 384 16.2.5 16 Application examples Mobile robotics Applications in the field of mobile robotics are a challenge for navigation. One reason is the requirement for an (almost) autonomous behavior of the robot. Apart from positioning and guidance, mobile robotics asks for methods of artificial intelligence (e.g., computer vision) and mechanical engineering. Mobile robotics vs. navigation In principle, the components of a mobile robot are responsible for moving within an environment, sensing the environment, and reasoning about the environment. In this connection, some similarity to elements of navigation systems are mentioned below. Details on mobile robotics may be found in Dudek and Jenkin (2000). As far as localization (rather than positioning) is concerned, the robot has to know its location for planning its further motion (path) or for performing requested operations. Mobile robotics distinguishes between strong localization relative to objects within the environment and weak localization relative to the trajectory of the robot, i.e., to locations where the robot has already been at an earlier time. Furthermore, "global" localization without any knowledge of a prior location is distinguished from "local" localization if an earlier location is updated. The latter procedure is known as pose maintenance in mobile robotics. In addition to localization, the robot has to learn more about the surrounding space. The question arises how the space can be represented (modeled) and how the robot can reason about space on the basis of this representation. These questions are addressed by computer vision and other techniques of artificial intelligence relying on research results of human perception and cognition obtained in neurophysiology. The representation of space is needed by the robot for identifying objects and regions within the environment and for analyzing whether the planned path is free of obstacles. As far as sensors are concerned, mobile robotics distinguishes between nonvisual and visual sensors. Nonvisual sensors use mechanical, inertial, audio, radio, and similar techniques to derive the location of the robot. Visual sensors use light reflected from the scene to reason about the objects and their structure and to draw conclusions about the characteristics of the surrounding. Furthermore, internal-state sensors provide feedback on parameters of the robotic system like battery level, wheel positions, poses of the arms or legs, etc. External sensors deal with the world outside the robot. Finally, mobile robotics is accompanied with a long list of sensor properties: speed of operation, cost, error budget, robustness, computational requirements, power consumption, weight and size, etc. 16.2 Specific applications 385 Comparable to digital maps used by navigation systems, environmental maps are the most natural representation of the space surrounding the robot. Besides geometry and topology, semantic data play an important role. For example, consider the characteristic of an object, whether it is fixed within space or movable or even transitory. Furthermore, it is suggested that an appropriate map for a mobile robot should also relate to the robot-specific sensor data. This means that a map should state if there are regions of, e.g. large radio interference or misleading sonar echoes. In this context, perceptual maps are often used, which directly reflect observable sensor data and, therefore, allow direct conversion of the sensor measurement to a spatial position. Finally, locomotion plays a similar part in mobile robotics as guidance within navigation. Locomotion controls the movement of the robot through its environment following one of two approaches of kinematics: @I @I Dased on given control parameters, the question is asked "how does the robot move?" Within navigation, this forward problem asks for a destination based on a given course. Given a desired motion. "which control inputs are required?". Within navigation, this inverse problem asks for the appropriate course to reach a desired destination. Application aspects Depending on the application, several classifications of mobile robotics can be given (Dudek and Jenkin 2000). With respect to the environment, the following categories of mobile robotics have emerged: terrestrial robots (legged, wheeled, etc.) moving on the ground, aquatic robots at the water surface or underwater, airborne robots, and space robots. Mobile robots are more and more employed instead of human beings under difficult environmental conditions: an inhospitable environment (e.g., dangerous), a remote environment (e.g., extraterrestrial), an inaccessible environment (e.g., microscopic), a very demanding environment (e.g., fatiguing), or a disagreeable environment (e.g., nuclear). The potential list of practical mobile robot tasks is long: delivery, collecting, assembling, manufacturing, cleaning, lawn-mowing, harvesting, aids for disabled people, intelligent or autonomous driving, survey and inspection, mining automation, military reconnaissance, bomb and mine disposal, and many others. 16 Application examples 386 16.3 Other applications Apart from their original purposes, navigation systems may be reused for other, nontransport or even nonnavigational applications. This section concludes the chapter on application examples with brief descriptions of a few such applications. 16.3.1 Geodesy Geodetic surveying As stated in the introductory chapter, the differences between navigation and surveying are blurring because the accuracy requirements for navigation are increasing toward the level of surveying. The impact of GPS has tremendously changed the geodetic world. Many applications involve GPS, like the establishment and densification of reference networks, cadastral surveys, engineering projects, terrain mapping, and many more. A large part of these tasks is performed by the static relative positioning method and postprocessing the measurement data in the office. For some of them, also kinematic procedures like real-time kinematic (RTK) surveying are applied. High accuracy requirements in the range of a few centimeters (sometimes even better) are typical for these geodetic tasks. Referring to GPS, this high accuracy may be only achieved by processing carrier phase measurements. Details on these positioning techniques are found in Sect. 9.3.4. The primary objective of static relative positioning, also called static surveying, is the determination of the vector (or baseline) between two stationary receivers. Relative positioning is possible if the measurements are made simultaneously at the two sites to the same satellites. The term "relative" implies that the coordinates of one of the two sites which is called reference station are known and that the position of the other site is to be determined relatively to this known reference station. For relative positioning, the measurements at both sites of the baseline are directly combined, usually by forming differences of the observations. Therefore, instead of "relative positioning" the term "differential positioning" is misleadingly used. In the strict sense, however, the two methods are different. Differential positioning (i.e., DGPS) is rather an improved singlepoint positioning technique by applying corrections to the raw measurement data (see Sect. 10.2). Kinematic relative positioning implies a motion of one receiver denoted as rover. The two receivers perform the observations simultaneously. The reference station remains usually static, whereas the rover may either move con- 16.3 Other applications 387 tinuously or in a kind of stop-and-go technique which is also called semikinematic method. RTK is the utmost challenge because the results are to be obtained outside in the field during the observation. This method requires a radio link between the baseline stations to transmit the phase data from one station to the other. Physical geodesy One of the primary tasks of physical geodesy is the determination of the geoid. Without considering GPS, basically two methods are applied: the astrogeodetic method using deflections of the vertical yielding relative geoidal heights and the gravimetric method based on Stokes' formula leading to absolute geoidal heights N. Some elementary explanations are given for the fundamental terms of physical geodesy like geoid, deflections of the vertical, astrogeodetic method, and Stokes' formula. Details are given in Heiskanen and Moritz (1967). The geoid is a physical reference surface. Denoting the earth potential of gravity by W, which is composed of the gravitational and centrifugal potential, the geoid is defined to be a specific equipotential surface with the gravity potential Wo. Approximately, this equipotential surface may be imagined as a closed surface formed by an average ocean surface and "continued under the topography" of the continents. Changing W0 by the quantity dW, another equipotential surface is obtained. The shapes of the equipotential surfaces are related to the mass distribution within the earth. Assuming a set of equipotential surfaces between a point on the surface of the earth and the geoid, the space curve being perpendicular on all equipotential surfaces is the plumb line (which is a slightly curved line). The distance between the geoid and the point on the surface of the earth along the plumb line is the orthometric height H. Note that the direction of the gravity vector is represented by the tangent to the plumb line. Using a theodolite, the measurements refer to the plumb line. Since the geoid has no simple analytic expression, it is more convenient to perform mathematical computations on an ellipsoid of revolution (and to adapt the results afterwards to the geoid). The basic relation between the surface of the earth, the ellipsoid, and the geoid is shown in Fig. 16.3. The relationship between the ellipsoid and the geoid is given by the formula h=H+N, (16.1) where h is the ellipsoidal height, H is the orthometric height, and N is the geoidal height (undulation). As indicated in Fig. 16.3, this formula is an approximation but is sufficiently accurate for all practical purposes. The 388 16 Application examples geoid Fig. 16.3. Definition of the geoidal height angle E expresses the deflection of the vertical between the plumb line and the ellipsoidal normal. This angle does not exceed 30 arcseconds in most 'TJ, a north-south and an east-west areas. Usually, E is decomposed into component. The astrogeodetic geoid determination is based on the differential relation e, dN = -Eds, (16.2) where dN is the geoidal height differential between two points separated by ds. Integrating this relation yields the geoidal difference between two points. This formula may be applied locally, but, as indicated, only relative geoidal quantities are obtained. Absolute geoidal heights N are obtained by Stokes' formula, which represents the gravimetric approach. The derivation is complex and omitted here. The formula requires gravity data all over the earth. Positioning with GPS results in xf, x2, x3 coordinates referring to WGS84. After applying the transformation from global Cartesian to ellipsoidal coordinates, ellipsoidal heights h are obtained. The inverse transformation is given in Sect. 3.1.2. If, additionally, one of the two remaining terms in (16.1) is given, the other one can be calculated. Thus, if the geoid is known, orthometric heights can be derived, or, if orthometric heights are known, geoidal heights can be derived. In the classical sense of physical geodesy, N is determined and, if one of the two other terms is known, the remaining one may be determined. Geodynamics The international geodynamics and geodetic communities strongly support the International GPS Service (IGS). Formally recognized in 1993 by the International Association of Geodesy (IAG), the IGS has developed a worldwide system that collects, archives, and distributes GPS observation data sets to generate the following products: 16.3 Other applications • • • • 389 GPS satellite ephemerides, earth rotation parameters, IGS tracking station coordinates and velocities, GPS satellite and IGS tracking station clock information. By these products, scientific activities like improving and extending the international terrestrial reference frame (ITRF) established by the International Earth Rotation Service (IERS), monitoring deformations of the solid earth and variations in the liquid earth (sea level, ice sheets), determination of the earth rotation vector, determination of satellite orbits, and monitoring the ionosphere are supported (http:/ /igscb.jpl.nasa.gov). Gravity field missions Three representative international space missions based on an accurate gravity field determination are briefly described: CHAMP, GRACE, and GOCE. The challenging minisatellite payload (CHAMP) mission is a German development managed by the Geoforschungszentrum Potsdam. The primary objectives are to generate simultaneously precise gravity and magnetic field measurements over a five-year period. The measurements yield spatial variations and their variations with time. Furthermore, GPS occultation and refraction data can be used for the derivation of temperature and water vapor profiles. Magnetometer, accelerometer, star sensor, GPS, laser retroreflector, ion drift meter will be payload components on the medium to low earth orbiting spacecraft. For more information see http:/ /op.gfz-potsdam.de/champ. The gravity recovery and climate experiment (GRACE) is a joint project between the NASA and the German Aerospace Center, i.e., Deutsches Zentrum fiir Luft- und Raumfahrt (DLR). The GRACE mission accurately maps variations of the gravity field of the earth over its five-year period. The GRACE mission comprises two spacecraft in formation flight separated by some 220 km in a polar orbit with a height of 500 km. The key payload element is the ranging system measuring the range changes between the two satellites by using carrier phases on two frequencies in the K and Ka band (see Table 4.5, old band designation). Each satellite transmits dual-frequency carriers to allow for ionospheric correction. The measurements of the two satellites are combined to give the ionosphere-corrected measurements of the range change between the satellites. Gravity variations are derived from these range changes. The gravity variations are related to changes due to surface and deep currents in the ocean, exchanges between ice sheets or glaciers and the oceans, mass changes within the earth. For more details see http:/ jop.gfz-potsdam.de/grace. 390 16 Application examples The primary objective of the gravity field and steady-state ocean circulation explorer (GOCE) mission is to provide models of the gravity field of the earth and of the geoid on a global scale with a very high resolution and accuracy. The mission will comprise a single satellite with a three-axis gradiometer and a GPS receiver. Gradients of gravitational acceleration in all three directions of the axes will be measured. Expected results are gravity anomalies with 1 mgal precision and a spatial resolution of 100 km and a global geoid accurate to 1 cm. The anticipated launch of the satellite is at the beginning of 2006. More details may be found under www.esa.int. 16.3.2 Timing Time determination is an implicit function of radio navigation systems. Currently, the mainly used systems are GPS and Loran-C. While GPS is available globally, Loran-C is often better suited for difficult terrain in higher latitudes due to the architecture of the terrestrial system. Among other applications, precise time synchronization is required for telephone or mobile communication networks to exploit the full capacity of the network infrastructure. Since the "responsible components" of communication systems (e.g., the base transmitter stations of a cellular network) are usually placed at known positions, a single radio navigation source may be sufficient - at least theoretically - to perform close synchronization with the time scale of the radio navigation system. Similar to timing, radio navigation systems may be used for frequency stabilization 'of power supply companies (2001 FRS: Sect. 2.6.5). 16.3.3 Miscellaneous applications Components of navigation appear in many disciplines far away from vehicles, traffic, and transportation. Examples are positioning and trajectory determination in zoology (game animals, migratory birds, etc.) and sports (persons or objects like balls). In several disciplines, the trajectory itself (e.g., correct passing of given waypoints) or certain parameters along the trajectory (e.g., speed, acceleration) may be of interest. Sometimes, the term navigation even seems to be misleadingly used. Consider, for example, neuronavigation, i.e., navigation in neurosurgery. Amazingly, the main components of navigation such as positioning (trajectory determination of the surgery instruments), routing (planning the instrument path), and guidance (steering the instrument safely along the "route") occur. Navigation systems in general- and GPS in particular- are sometimes used for other purposes than positioning. For example, the term GPS meteorology implies the improvement of short-range numerical weather prediction, 16.3 Other applications 391 especially precipitation forecast, by tropospheric delays experienced by GPS phase measurements. GPS occultation and refraction measurements may be used to derive atmospheric information on temperature, water vapor, and total electron content. A wide variety of fascinating examples is contained in the applications contest organized by the magazine "GPS World"· a collar for elephants to secure their future, sustain the beauty and ecological integrity of the places they live; high-precision hydrographic surveys of moving buoys to detect currents; the global stash hunt game where a small object must be located on the basis of coordinates provided by someone else; water quality sensors towed behind a boat and linked to a GPS receiver to record water quality data like temperature, salinity, dissolved oxygen, depth. As seen from these examples, navigation is only limited by one's imagination. The future will lead to applications which cannot be dreamt of today.