Experiment 9
HOOKE’S LAW AND SIMPLE HARMONIC MOTION
Objectives
1. Verify Hook’s law,
2. Measure the force constant k of a spring, and
3. Measure the period of oscillation of a spring-mass system and compare it with its predicted value
Theory
How is a spring deformed when we applied forces to it? What causes a spring to be different from another one?
How does the period of oscillation of a simple harmonic oscillator change, as a function of its mass and the value of its
force constant? How does the theoretical value of the period of oscillation of the mass in the spring compare with the
measured value? These are some of the questions that we will be able to answer once we have made the experiment that we
will describe shortly. In 1676 Robert Hooke, an English scientist, who lived in Newton’s time, discovered and established
the law that takes its name and that is used to define the elastic properties of a body. In the study of the effects of the forces
of tension, and compression, he observed that there was an increase in the length of the spring, or elastic body, which was
proportional to the applied force, within certain limits. This observation showed that the deformation is directly
proportional to the distorting force,
F = – kx
1
Where F is the force, measurement in newtons (N), k, the force constant of the spring and ∆x, the extension, or
compression. The negative sign indicates that the force of the string is a restoring force, or opposed to the external force
that deforms it. This expression is known as Hooke’s law. If the distorting force exceeds a certain maximum value, the
body will not return to its original size (or its form) after suppressing that force. Then one says that the body has acquired a
permanent distortion. The tension, or compression, smaller than the one that produces a permanent distortion is called
elastic limit. Hooke’s law is not applicable for distorting forces that exceed the elastic limit. On the other hand, when the
movement of an object is repeated in regular intervals, or periods, it is called a periodic motion. If we take the oscillations
from a simple pendulum, for angular displacements smaller of 12 °, we have an example of periodic motion. Let us
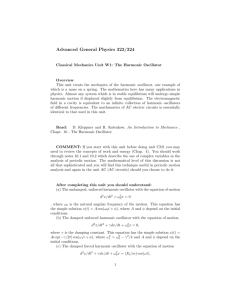
consider a particle of mass m, attached to a spring that oscillates in the x-direction on a horizontal surface, without friction.
See figure 9.1. (Please, go to the following Internet site where there appears the animation of two simple harmonic
oscillators with different oscillation frequencies: http://www-staff.maths.uts.edu.au/~bobr/images/shm.gif)
Figure 9-1 A simple harmonic oscillator reacts with a force that opposes the deformation
Applying Newton’s second law to the spring-mass system we have:
– kx = ma
2
On the other hand, the instantaneous acceleration is defined as,
Juan A. González Sánchez and Claudio Guerra-Vela. Department of Physics and Electronics. University of Puerto Rico at Humacao.
Sponsored by the National Science Foundation (NSF) © All rights reserved (2006)
1
a=
d 2x
3
dt 2
Combining equations 2 and 3 we obtain that:
m
d 2x
dt 2
= −kx
4
k
x =0
m
5
Or,
d 2x
dt
2
+
Equation 5 is a second order linear ordinary differential equation with constant coefficients for which we propose a solution
of the form,
x (t) = A0 cos ωt
6
Where A0 is the amplitude of oscillation, or maximum elongation, and ω, the frequency. This solution is correct if
ω=
k
m
7
We can see from here that the period of oscillation, T = ω/2π can be written as:
T = 2π
m
k
8
Materials
Equipment
Force Sensor
Rotational Motion Sensor
Pasco Computer Interface
Qty
1
1
2
Linear motion accessory
1
multiple clip
1
Equipment
System of spring-mass for Hooke’s law
Base of support
Metallic rod of 120 centimeters in length and
diameter of ½ ".
Rod with a diameter of ¾” and 45 cm of length
Qty
1
1
1
Mass and suspension system
1
1
Procedure
Installation of the equipment
1.
2.
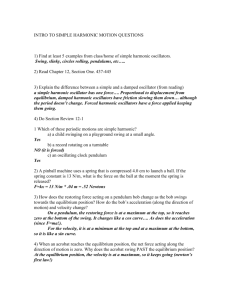
Check that the experiment setup on your bench looks like the one shown in Figure 9-2 below
Make sure that the force sensor, the spring, and the linear motion accessory are vertically aligned
Part I. Hooke’s Law
1.
2.
3.
4.
Set the force sensor to zero by pressing the zero button on the sensor while the spring is relaxed
Create a graph of Force (N) versus Position (m) taking the data force from the force sensor and the position from the
rotation sensor
Press “Start”. Slowly pull down the rod attached to the lower end of the spring. The diagram of force against spring
elongation appears in the graph. Press “stop” when the lower end of the spring reaches the rotational motion sensor
Note: It is very important to go slowly when doing the measurement
Juan A. González Sánchez and Claudio Guerra-Vela. Department of Physics and Electronics. University of Puerto Rico at Humacao.
Sponsored by the National Science Foundation (NSF) © All rights reserved (2006)
2
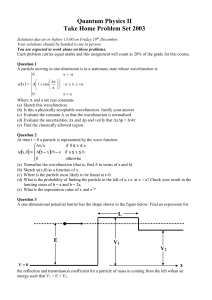
5.
6.
7.
Your data must look like the figure to your
right:
Press the scale button to improve the graph
appearance
Press “Fitting” and select “Linear Fitting” to
obtain the equation for the best straight line that
fits your data. The slope of the line is the spring
constant. The spring constant for this example
is 3.271 N/m
Figure 9-2 Experiment setup
Part II Simple Harmonic Oscillator
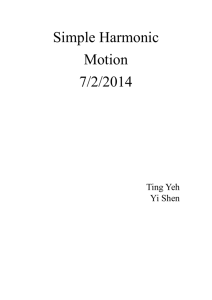
1. Make the necessary changes to your setup to arrive to the one shown in the figure to
the right
2. Weigh the spring, and the support, and add a mass of 0,050 kilogram
3. Register the value of the total mass (kg) for the first run of this experiment
4. Place the motion sensor in the floor, directly underneath the weight support
5. Pull the mass down and release it. Allow it to oscillate a few times so that the springmass system will move up and down without much side to side movement
6. Make a graph of Position versus time by pressing “start” and stop the measurement
after 4 seconds
7. Run the experiment again after adding a mass of 20-g (0.020-kg) to the support and
registering the total mass
8. Repeat the process of data collection
Note: The curve of position vs. time must resemble a sine function. If this is not the case,
verify the alignment between the sensor and the bottom of the support
Juan A. González Sánchez and Claudio Guerra-Vela. Department of Physics and Electronics. University of Puerto Rico at Humacao.
Sponsored by the National Science Foundation (NSF) © All rights reserved (2006)
3
Data analysis
1.
Press the tool Zoom lens to emphasize and extend the
first three maximum tips of the curves
2.
Press the button for intelligent tool on the monitor. The
intelligent tool will appear in the graph
3.
Move the intelligent tool to the first tip in the diagram
of position against time
4.
Move the cursor to the inferior corner of the intelligent
tool. A triangle (called the tool delta) will appear
5.
Drag the delta to the following tip. The value of delta
X is the period. In the example, the period is 0.9200
6.
Register the period (measured) for the first run
7.
Move the intelligent tool to the following tip
8.
Use the tool of the delta to find the period between the seconds and third tips
9.
Register the period. Calculate an average of these values and register it.
10. Repeat the procedure for the second run of the experiment
Juan A. González Sánchez and Claudio Guerra-Vela. Department of Physics and Electronics. University of Puerto Rico at Humacao.
Sponsored by the National Science Foundation (NSF) © All rights reserved (2006)
4
Experiment 9. Laboratory Report
Hooke’s Law and simple harmonic motion
Section _______ Laboratory bench _______
Date: _________________________________________________________
Student’s names:
___________________________________________________________
___________________________________________________________
___________________________________________________________
___________________________________________________________
Part I. Hooke’s Law
1.
2.
3.
Use the table below to write down the slope of the straight line that you obtained from your graph of Force vs. Position
Ask your lab instructor the expected value of the spring constant provided by the manufacturer, and write it down in
the same table
Calculate the uncertainty ∆k% (relative percentile difference) between these two values
Value of k from the slope
(N/m)
∆k % =
∆k%
Expected value of k (N/m)
Expected value - Measured value
Expected value
× 100
Questions
1.
Identify the main sources of error in this part of the experiment
Juan A. González Sánchez and Claudio Guerra-Vela. Department of Physics and Electronics. University of Puerto Rico at Humacao.
Sponsored by the National Science Foundation (NSF) © All rights reserved (2006)
5
2.
Write down the mathematical equation that relates the force applied to the spring to its elongation, known as Hooke’s
law
Problem
1.
A person standing up on a bath spring scale reads a weight of 670 N. It is known that in this case the spring’s
compression is equal to 0.79 cm. (a) Calculate the spring constant value (b) Find the weight of another person who
compresses the spring by 0.34 centimeters on the same scale
Part II. Simple Harmonic Motion
1.
Fill out the blanks with your data in the following table:
Run
First
Total mass, m = support + added (kg)
Average period, T (s)
Second
2.
Make a graph of T 2 vs. m . Notice that you will obtain a straight line with a slope of 4π 2 / k since
T = 2π
m
k
Attach the graph to your report
3.
Obtain a value of k from that slope. Compare the value of the spring constant that you just obtained, which is the
measured value, to the value provided by your laboratory instructor (theoretical, expected, or reported value).
Calculate again the percentile relative uncertainty of these two values
∆k % =
Reported value of k - Measured value of k
Reported value of k
× 100 =
Juan A. González Sánchez and Claudio Guerra-Vela. Department of Physics and Electronics. University of Puerto Rico at Humacao.
Sponsored by the National Science Foundation (NSF) © All rights reserved (2006)
6
Questions
1.
Is there a systematic error between the measured value of k and its reported value? Explain your answer referring to
the ∆k% value that you obtained from the second part of this laboratory exercise
2.
Suppose you have a simple harmonic oscillator with a period T. Find the new value of the period for this simple
harmonic oscillator if you double its mass
3.
Do your results support the hypothesis? Explain your answer
Problem
A spring stretches by 0,020 m when an object of 3.7-kg is suspended from its lower end. How much mass is required to
hang from this spring so that its frequency of oscillation becomes 4.0 Hz?
Juan A. González Sánchez and Claudio Guerra-Vela. Department of Physics and Electronics. University of Puerto Rico at Humacao.
Sponsored by the National Science Foundation (NSF) © All rights reserved (2006)
7
Experiment 9. Questions
Hooke’s law and simple harmonic oscillator
This questionnaire has some typical questions on experiment 9. All students who are taking the laboratory course of
University Physics I must be able to correctly answer it before trying to make the experiment
1.
What is the relation between the force produced by a spring and its elongation?
a. The force increases when stretching it
b. The force diminishes when stretching it
c. The force is the negative of the elongation
d. There is no relationship between them
e. The force does not change when stretching it
2.
When a force produces a permanent deformation in a spring,
a. Hooke’s law loses its validity
b. a simple harmonic oscillator is created
c. Hooke’s law continues being valid
d. the force is proportional to half of the deformation
e. the force is proportional to the position
3.
In a simple harmonic oscillator, when we plot the square of the period versus the mass, which of the following
expressions is equal to the value of the spring constant?
2π
a.
k
b.
c.
d.
e.
4π 2
slope
4π 2
k
4π 2
slope
k = slope
4.
The mathematical relationship between the period and the frequency of a simple harmonic oscillator is that of:
a. simple proportionality
b. direct proportionality
c. inverse proportionality to the square
d. direct proportionality to the square
e. inverse proportionality
5.
A person who weighs 500 N rests on a balance. The spring of the balance is compressed by 0,39 cm. What is the
value of the spring constant?
a. 1.28 × 10 3 N/m
b. 1.95 × 10 2 N/m
c. 1.28 × 10 5 N/m
d. 1.95 × 10 4 N/m
e. We need to know the value of the acceleration of the gravity to make the calculation
6.
What is the angular frequency of a simple harmonic oscillator whose mass of 25 kg oscillates with a spring whose k is
8.5 × 10 4 N/m?
a. 3,400 rad/s
b. 58.3 rad/s
c. 7.35 × 10 -3 rad/s
d. 58.3 Hz
e. 8.6 × 10 -2 rad/s
Juan A. González Sánchez and Claudio Guerra-Vela. Department of Physics and Electronics. University of Puerto Rico at Humacao.
Sponsored by the National Science Foundation (NSF) © All rights reserved (2006)
8
7.
The spring constant of a simple harmonic oscillator that oscillates with a frequency of 0.5 Hz when its mass is 1.0 kg
is:
a. π2 N/m
b. 0,25 N/m
c. π2 N/cm
d. 0.25 N/cm
e. (0.25/9.81) kg/m
8.
The period of a simple harmonic oscillator is defined as:
a. The inverse of its angular frequency
b. The time elapsed for a complete oscillation
9.
m
c.
T=
d.
e.
The time it takes to reach a complete extension
The number of oscillations by time unit
k
The period of a simple harmonic oscillator with a k of 8.5 × 104 N/m and a mass of 25 kg is:
a. 0.108 s
b. 5 s
c. 8.6 × 10 -2 s
d. 58.3 s
e. Unknown
10. The frequency of a simple harmonic oscillator with a k = 8.5 × 10 4 N/m and a mass of 25 kg is:
a. 541 Hz
b. a mystery
c. 9.28 Hz
d. 1.17 ×10 -3 Hz
e. 3.14 Hz
11. A spring extends 0.018 m when an object of 2.8 kg is suspended from its end. How much mass must support this
spring so that its frequency of vibration is 3.0 Hz?
a. All that it is able to hold
b. 10.1 kg
c. 3.2 kg
d. 7.6 kg
e. 4.3 kg
12. If a simple harmonic oscillator has an angular frequency of 9.42 rad/s, what is its frequency in Hz?
a. 1.5 Hz
b. 3 Hz
c. 9.42 Hz
d. The same one, because 1rad/1s = 1 Hz
e. 10 Hz
Juan A. González Sánchez and Claudio Guerra-Vela. Department of Physics and Electronics. University of Puerto Rico at Humacao.
Sponsored by the National Science Foundation (NSF) © All rights reserved (2006)
9