Chapter 2 Reference Frames and Roto-translations
advertisement

Chapter 2
Reference Frames and
Roto-translations
Before we start to the study the kinematics and dynamics of rigid bodies and multibody systems, it is appropriate to recall some geometrical concepts used to describe
the basic quantities and the associate transformations transformations that characterize the motion of a rigid body in space.
We will start with a formal definition of reference frames and then we will introduce
the translation, rotation and roto-translation operators, that are essential for the
study of motion of rigid bodies.
2.1
Tridimensional space
For simplicity, from now on, we will assume to be confined in a tridimensional
world, except when we will study two-dimensional problem, as in planar motion or
in robotic computer vision; consequently vectors will be described as elements of the
3D space R3 , or E3 if the Euclidean norm is implicit.
With no intention to raise philosophical questions, we can assume that the physical
world around us, including the geometric entities we perceive, exist independently
of any reference frame. On the contrary, for modelling purposes, it is very often necessary to express vectors with respect to one or more reference frames; we can say
that fixing a coordinate system and the related reference frame “gives substance”
to vectors: these can now be compared and measured relative to a common ruler.
Moreover, suitable operations acting on vectors allow to determine, represents and
measure geometric entities as angles, distances, orthogonality, projections, or physical quantities, as fields, powers, angular and linear velocities, etc.
In principle, there is a difference between a reference frame and a coordinate system:
the latter indicates the abstract structure used to define vectors, while the former
9
10
Basilio Bona - Dynamic Modelling
indicates a specific way to define the parameters that characterize the vectors; examples of coordinate systems can be the cylindrical, the spherical or the rectangular
(cartesian) coordinate system, while examples of (cartesian) reference frames are
Earth centered inertial frame, the International Celestial reference frame (ICRF)
and others [25]. In the following we will use indifferently the two terms to indicate
a cartesian reference coordinate system, as specified in the following paragraphs.
2.2
Reference frames
A reference frame is defined by the symbol R(O, i , j , k ) or R for short, where
O is a particular point in space, called the origin, and i , j , k are three unit normal
vectors, defining the metric properties of the space.
Since it creates a loophole to define vectors in relation to a reference frame that is
essentially built on vectors, it is necessary to understand how to construct R without
making use of vectors and operations not yet defined.
The only things we need in order to build a reference frame is the concept of square
angles, i.e., orthogonality between lines, and three geometric directed segments or
−−→ −−→
−−→
directed numbers A′ A, B ′ B, and C ′ C of equal length, that have the function of
rulers of unit length in the 3D space. That of directed segments is a basic concept
described in any introductory physics textbook, and has been briefly recalled in
Appendix A.3.
Having fixed the origin in O, we place the directed segments so that the three
starting points A′ , B ′ , and C ′ coincide with O. Furthermore, the three segments
must not be aligned with each other or lying all on the same plane.
Usually these conditions are sufficient to characterize the reference frame, but, in
order to preserve the orthogonal angles and orthogonal projections when using vector
products, we orient the three segments at angles of π/2 with respect to each other.
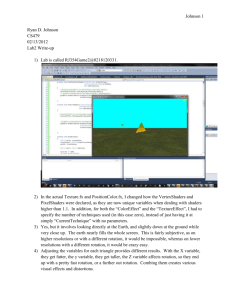
These constraints allow only two possibilities, that are illustrated in Figure 1a) and
b). The reference system in Figure 1a) is called a right-handed reference frame,
while that of Figure 1b) is a left-handed reference frame. These names derive
from the right-hand rule or the left-hand rule, illustrated in Figure ??
The most commonly used reference frame (from now on simply called RHF) is the
first one, and we will tacitly adopt this convention in the rest of the book.
In Figure 2.1, the three directed segments have been identified with the symbols
−→
−−→
−→
i = OA j = OB k = OC
(2.1)
The set {i , j , k } is called base vector set, and i , j , k are called base or basis vectors.
We also say that {i , j , k } form a right or left orthonormal basis in R3 .
We are now able to use R(O, i , j , k ) to characterize any other vector in R3 .
Basilio Bona - Dynamic Modelling
11
Figure 2.1: a) right orthonormal reference frame; b) left orthonormal reference
frame.
Given a reference frame R, a vector v ∈ R3 is represented by three components, each
one being the orthogonal projection of the directed segment on the three elements
i , j and k . This can be written as the linear combination of the base elements, and
give origin to the well-known algebraic definition of vectors:
v = v1 i + v2 j + v3 k
(2.2)
where vi ∈ R, i = 1, 2, 3, are the three vector components with respect to R.
In order to be able to define the values of vi , it is necessary to introduce a binary
operation between two vectors a and b, called the scalar vector product or dot
product, and defined as:
a · b = a1 b1 + a2 b2 + a3 b3 = b · a
(2.3)
We have defined this product and its properties in Appendix A.4.1; for the moment,
relation (2.3) is sufficient for our aims. The three components vi are defined as:
v1 = i · v
v2 = j · v
v3 = k · v
(2.4)
12
Basilio Bona - Dynamic Modelling
As i , j , k are vectors themselves, each one can be expressed according to (2.2):
i = i1 i + i2 j + i3 k
j = j1 i + j2 j + j3 k
k = k1 i + k2 j + k3 k
(2.5)
Since i is orthogonal to j and k , and has unit length, its first component must be
equal to one, while the other two must be zero; the same argument holds for j and
k as well.
Hence, if we define
1
0
0
e 1 = 0 e 2 = 1 e 3 = 0 ,
0
0
1
(2.6)
it follows that
i = e1 j = e2 k = e3
(2.7)
Therefore the representation of the reference frame R into itself can be given by the
identity matrix
1 0 0
[
] [
]
i j k = e 1 e 2 e 3 = I = 0 1 0 .
(2.8)
0 0 1
According to (2.2), each vector can be represented by a column of real components
that we call a column vector :
v1
v1
[
] v1
(2.9)
v = i j k v2 = I v2 = v2
v3
v3
v3
In (2.9) we have implicitly assumed to know how to use the matrix notation and to
understand the row by column product rule.
COMPLETARE
Although notation (2.8) may appear pedantic and superfluous, we will see in Section
?? that it is possible to represent a reference frame R2 with respect to another
reference frame R1 replacing the identity matrix I with a square orthogonal matrix
R, having the specific geometric meaning properties, described in Section ??;
COMPLETARE
Relation (2.9) is the simplest form of a more general relation v 1 = Rv 2 that provides
the representation in R1 of a vector v 2 with components given in R2 .
To indicate the single components of a vector v one can adopt numerical k = 1, 2, 3
or literal k ∈ {x, y, z} indexes. While the literal indexes have an immediate meaning,
Basilio Bona - Dynamic Modelling
13
they are more difficult to use when computer algorithms or mathematical formulas
are considered; for example, the norm of a vector can be written as follows
∑
∥v ∥2 =
vk2
k∈{x,y,z}
or
∥v ∥ =
2
3
∑
vk2
k=1
The second one is much more immediate, and except that some particular case, the
numerical indexes will be adopted throughout these notes.li.
Often we omit to specify the origin of a reference frame that is simply indicated
as R(i , j , k ). Other times we use an index to specify a particular reference frame;
for example we use the symbol Rm (i m , j m , k m ) to indicate a “local” frame and
R0 (i 0 , j 0 , k 0 ) to specify an “inertial” frame1 .
Given a specific reference frame Rm and a geometrical point P , this one is described
−→
in Rm by the (geometrical) vector v m
p that represents the oriented segment OP :
m m
m m
m m
vm
p = v1 i m + v2 j m + v3 k m
(2.10)
This notation puts in evidence the reference frame m that is used to represent P .
The index m is omitted whenever there are no ambiguities.
Given two reference frames R1 e R2 , the same geometrical point P has two representations:
[
]T
v 1p = v11 v21 v31
(2.11)
in R1
[
]
T
v 2p = v12 v22 v32
(2.12)
in R2
In alternative, we can use one of the following symbols to indicate the representation
−−→
of v or U V in Rm :
v1
[−−→]
v2
UV
[v ]Rm [⃗v ]Rm
(2.13)
Rm
v3 Rm
2.3
Vector types
We represents vectors with a graphical icon: the most used icon is an arrow, as in
Figure 2.2. Unfortunately this icon is sometimes misleading, as we will see, considering that there are two types of vectors with different properties polar vectors
1
We use the term inertial for pseudo-inertial reference frames, as those fixed in the environment.
14
Basilio Bona - Dynamic Modelling
and axial vectors also called pseudovectors (for details see also [2]). Examples
of polar vectors are those used for geometrical points, linear velocities and accelerations, forces, gradients, normals, unit vectors, etc., while examples of axial vectors
are angular velocities, torques, moments, cross products, etc.
Figure 2.2: The vector icon.
To make things clear one should associate a different icon for each type of vectors:
the arrow for polar vectors, and a different icon, e.g., a segment with a small curl,
to the axial vectors, as sketched in Figure 2.3.
Figure 2.3: Two different icons: an arrow for polar vectors, a segment with a curl
for axial vectors.
Unfortunately this is not the case, and we have the same symbol for both; when we
want to interpret the arrow icon for polar vectors we should perform the implicit
transformation depicted in Figure 2.4.
A formal characterization of the two types of vectors is possible considering the
property of invariance with respect to reflections. Although reflections will be mathematically defined only in Sections ?? and 2.8;, we can for the moment rely on the
intuitive meaning.
COMPLETARE
Basilio Bona - Dynamic Modelling
15
Figure 2.4: To interpret the arrow icon for an axial vector one shall perform the
transformation depicted here, i.e., align the right hand thumb with the arrow axis
to obtain the curl from the other fingers.
2.3.1
Polar vectors
Consider Figure 2.5, where a vector v 1 is reflected with respect to two orthogonal
planes; the plane π1 parallel to v 1 , and the plane π2 orthogonal to v 1 . The resulting
vectors are v 2 and v 3 : since v 2 = v 1 , the properties of the two vectors are the same,
while, given that v 3 = −v 1 , the reflection reverse the direction of the vector, and
consequently its physical significance.
Examples of physical polar vectors are displacements, linear velocities and forces,
among others.
2.3.2
Axial vectors
Axial vectors are vectors that represent directed quantities that are antisymmetrical with respect to a reflection through a parallel plane π1 , and are symmetrical
with respect to a reflection through a perpendicular plane π2 , as shown in Figure
2.6.
In this case the reflections have completely different effects: considering the vector v 3
obtained by a reflection with respect to π2 , the curl icon does not change direction,
so we can say that v 3 = v 1 . Should we have used the arrow icon our vector would
have changed direction and therefore its physical meaning. The result of a reflection
with respect to π1 would change the curl direction, and, using the right-hand rule,
this means a reverse in effect, i.e., v 2 = −v 1 .
Examples of axial vectors are angular velocities and torques.
The distinction between axial and polar vectors is often omitted in mechanical textbooks, but, among other application, it will become important when using quaternions to represent rotations, as presented in Sections 2.12.6 and 2.12.7.
16
Basilio Bona - Dynamic Modelling
Figure 2.5: The symmetry and anti-symmetry of polar vectors.
It is important to add that the cross product of two polar vectors produce an axial
vector
a (polar) × b (polar) = c (axial)
The interested reader can find furthere details in [2] and [51].
2.4
Geometrical and Physical vectors
In these notes vectors will be used to represent both geometrical points, as the set
of vertices in a rigid object, the barycenter of a plate, the location of a fixture, the
position of a joint, etc., and signed quantities having a physical significance, as linear
or angular velocities and accelerations, forces, moments, torques, etc.
We will indicate the former as geometrical vectors, while the latter are known as
physical vectors.
2.4.1
Geometrical vectors
A geometric point P ∈ R3 , is described by the associated vector p that contains the
−→
representation of the directed segment OP in R(O, i , j , k ).
Basilio Bona - Dynamic Modelling
17
Figure 2.6: Axial vector symmetry.
Given two different reference frames, R1 (O1 , i 1 , j 1 , k 1 ) and R2 (O2 , i 2 , j 2 , k 2 ), the
same geometric point P is associated to two different vectors p 1 and p 2 , respectively
the representation of P in R1 and R2 .
As an example, a velocity defined in the plane by the vector ⃗v in Figure 2.7, had a
representation v a = (va1 , va2 ) in the cartesian reference frame Ra that is different
from the representation v b = (vb1 , vb2 ) in Rb .
The relation between p 1 and p 2 will be discussed in Section 2.9.
2.4.2
Physical vectors
−→
A physical vector QP is an oriented segment, also known as directed segment
or directed quantity, that represents a physical quantity, such as linear or angular
velocity, gravitational acceleration, force, torque, etc.
We cite some lines from [24]
(1) A physical vector is a quantity with some physical origin. However
general this may be, it already expresses some other interpretation of a
vector, since the mathematical vector space axioms make no requirement
as to the origin or characteristic of the vectors.
18
Basilio Bona - Dynamic Modelling
Figure 2.7: A vector as an abstract entity and its representation in two different
reference frames. The vector ⃗v is the same, but the two representations have different
components in Ra and Rb .
(2) A physical vector has a magnitudo, which is not part of the initial description of a mathematical vector. If, however, one introduces
magnitudes by means of the additional structure of an inner product,
these are real numbers, and not, as in physics, dimension-laden physical
scalars.
(3) Finally, a physical vector has a direction in (physical) space, because the physical vector spaces described above have a close relation
to the position vector space. There is no correspondence here with the
mathematical concept of a vector, since the axioms make no mention of
a physical space.
A physical vectors has an application point Q, that can be free or constrained, a
direction, and a magnitude, as in Figure 2.2.
−→
It is usual to represent the vector QP by a difference between two geometrical
vectors, as in Figure 2.9.
v1
p1 − q1
3
⃗v = v QP ∈ R = v Q − v P = p2 − q2 ≡ v2
v3
p3 − q3
It should be noted that these vectors can be of two types: what are called free vectors
and what are called applied or point vectors. With free vectors, the application point
Q, also called application point, has no physical or geometric significance; one can
translate v parallel to itself without producing a variation in any effect it could
Basilio Bona - Dynamic Modelling
19
Figure 2.8: The oriented segment is represented by the difference of two geometrical
points: ⃗vQP = v P − v Q .
generate. On the contrary, for applied vectors, the application point U cannot be
changed without affecting in some way the physical significance of the effects it
represents. As an example, a force acting on a rigid body is an applied vector, as
one cannot change its application point without, in general, affecting the torque
acting on the mass center of the body itself; the linear velocity of a rigid object,
on the contrary, can be translated in any other point of the object without causing
much trouble.
2.4.3
Vector units
When it is necessary to assign physical units to vector components, two approaches
are possible: 1) assign the units to the axes; 2) assign the units to each component.
The first approach is more elegant, but often we have vector components with different units; for instance, the state vector of a particle moving on the plane has
two components, namely its position and its velocity. In this case it is more convenient to have adimensional axes and assign units to the components; however this
approach produces some interpretation problems when we make a scalar product
or we compute the norm of the vector, that will result in the square root of space
squared plus velocity squared. Nevertheless it is a common rule to apply the second
approach, that will be used also in the present notes.
2.5
Rigid Bodies and Their Displacements
With the term rigid body we define any tridimensional object for which the distance
between any couple of its points remain constant in time, independently from any
motion or any force or torque applied to it. Similarly we call rigid displacement
20
Basilio Bona - Dynamic Modelling
or rigid motion the motion of a rigid body in space.
A rigid body is an abstraction, since in nature (or at least in the macro-world where
mechatronic modelling is used) perfectly rigid bodies do not exist. Every object
is distorted, warped or deformed under the effects of static or dynamic forces or
torques; similarly, the rigid motion is an abstraction. Consider a steel plate that
under the effect of its mass and gravity acceleration (a static force) bends in various
different shapes according to its position with respect to the vertical. Also not
considering gravity, if we take a steel plate and accelerate it, it will flex, and return
into its original shape only after the resulting vibrations are damped.
Nevertheless those abstractions will make the characterization of the tridimensional
space geometry simpler and rich of theoretical and practical developments. So, as
put in evidence in the introduction, we will make this approximating assumption
and study the models of rigid displacements.
It has been demonstrated by Chasles (1830) that any rigid displacement in space
can always be decomposed into a translation and a rotation; more precisely the
Chasles theorem states that the most general displacement of a rigid body in R3 is
the composition of a rigid translation along a line and a rotation around an axis
parallel to the same line [3, 4].
Given the characteristics of invariance of the distances between any two points in a
rigid body, it is possible to describe a rigid body B with respect to a reference frame
RB (i B , j B , k B ), since once the origin and the orientation of the body reference frame
is known, all B points are also known or can be determined.
2.6
Translations
[
]T
Given a vector v = v1 v2 v3 , a rigid translation is the operator Trasl(v , t)
that displaces v parallel to itself of a given vector t:
v1 + t1
def
(2.14)
Trasl(v , t) ≡ v t = v2 + t2 = v + t
v3 + t3
−→
−−→
−→
Since the oriented segment AB is the difference between OB and OA
⃗v AB = v B − v A
(2.15)
the translation of an oriented segment is simply
⃗v tAB = v tB − v tA = v B + t − (v A + t) = v B − v A = ⃗v AB
(2.16)
from which we deduce that the representation of an oriented segment is invariant
with respect to translations. Since oriented segments usually represent physical
Basilio Bona - Dynamic Modelling
21
quantities, as forces, torques, velocities, etc., we say that their representation is
invariant to translations.
Now assume to have two different reference frames Rk and Rm , having the same
origin and the same basis {i k , j k , k k } = {i m , j m , k m } = {i , j , k }, and assume to
translate Rm with respect to Rk so that its new origin is now O′ . We call t km the
−−→
oriented segment OO′ , that represents the translation from reference frame k to
reference frame m.
−−→
A geometrical point P , represented in Rm by O′ P = v m
P will be represented in Rk
by
−→
k
OP = v kP = v m
(2.17)
P + tm
and so we can conclude that, while the representation of physical vectors is unaffected by rigid translations as in (2.16), the representation of a geometrical point in
a translated reference frame adds the translation vector, as in (2.17).
The inverse operator of the translation is defined as
i
k
k
m
Trasl(v , t)−1 = Trasl(v , −t) = −Trasl(v , t) = v m
p = vp − tm = vp + tk
and
−t km = t m
k
Since the transaction operator is represented by a vector sum, it is commutative
Trasl(v , a)Trasl(v , b) = Trasl(v , b)Trasl(v , a) = Trasl(v , a + b)
i.e., given n translations t i , i = 1, . . . , n, the total translation is
t=
n
∑
ti
i=1
Strange as it may appear, the translation of a quantity t is not a linear operator,
since it does not obeys the axioms listed in (A.1).
Indeed, the axioms will require
Trasl((λ1 a + λ2 b), t) = λ1 a + λ2 b + t
instead it results
λ1 Trasl(a, t) + λ2 Trasl(b, t) = λ1 (a + t) + λ2 (b + t) = λ1 a + λ2 b + (λ1 + λ2 )t.
The two relations coincide only if λ1 + λ2 = 1; this fact characterize the properties
of an affine space and not of a linear space, as described in [14].
22
2.7
Basilio Bona - Dynamic Modelling
Rotations
A well known theorem by Euler, published in 1776, states that in three-dimensional
space, any displacement of a rigid body such that a point on the rigid body remains
fixed, is equivalent to a single rotation of a given angle about some axis that
contains the fixed point.
In modern symbols we will indicate the rotation axis with a unit vector u and the
angle with θ, such that the rotation is characterized by the vector v = uθ; unfortunately, as we will see, the composition of two or more rotations cannot be reduced
to the sum of the related vectors; a more complex characterization is necessary.
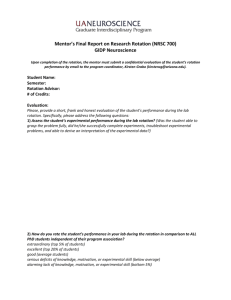
We can describe the rotation assuming a rigid body with its reference frame and
considering a rigid displacement that leaves the reference frame origin O fixed, while
the basis unit vectors are changed under the rotation. A rotation is therefore characterized by the mathematical relation between these two reference frames.
Figure 2.9: An example of rigid rotation of a frame with respect to the origin O.
In order to represent a rotation we must consider two reference frames Rm (O, i m , j m , k m )
and Rn (O, i n , j n , k n ), with common origin O; initially they are coincident, i.e., each
unit vector of the first base {i m , j m , k m } coincides with the corresponding unit vec-
Basilio Bona - Dynamic Modelling
23
tor of the second base {i n , j n , k n }.
Now we take one frame, for instance Rn and rotate it around the common fixed
origin O of a arbitrary angle θ. The rotation axis is itself arbitrary, and we call u
the unit vector that represents it; the only condition is that the origin O must lie
on the rotation axis.
At the end of the rotation Rn has taken a different “orientation” with respect to
Rm , and the two basis will be no more completely coincident, although it is always
possible that some of the unit vectors remain coincident. We can now define the
representation of each basis unit vector of Rn in Rm , as follows
m
in1
def
m
m
m
im
= im
(2.18)
n
n1 i m + in2 j m + in3 k m = in2
im
n3
def
m
m
m
= jn1
i m + jn2
j m + jn3
km
jm
n
m
jn1
m
= jn2
(2.19)
m
jn3
def
m
m
m
km
= kn1
i m + kn2
j m + kn3
km
n
m
kn1
m
= kn2
(2.20)
m
kn3
Considering the above relations and recalling that the components of a generic vector
v1
v = v2
v3
are given by
v1 = v · i = v T i = i T v
v2 = v · j = v T j = j T v
v3 = v · k = v T k = k T v
it is possible to introduce a matrix Rm
n , whose columns are the representations of
the basis unit vectors of Rn in Rk :
m m
m
in1 jn1 kn1
[ m m
] m m
m
j n km
(2.21)
Rm
= in2 jn2 kn2
n
n = in
m
m
im
n3 jn3 kn3
Therefore this matrix Rm
n represents the transformation that describes the rotated
frame Rn with respect to the fixed frame Rm , with common origins.
According to (2.21), Rm
n has the following structure:
24
Basilio Bona - Dynamic Modelling
• the first column is the representation of the first unit basis vectors of Rn in
Rm ,
• the second column is the representation of the second unit basis vectors of Rn
in Rm ,
• the third column is the representation of the third unit basis vectors of Rn in
Rm ,
It follows that the matrix Rm
n can be interpreted as the representation of Rn in Rm .
By a convention adopted in many textbooks, the lower index n of R denotes the
represented reference frame (the rotated one), while the upper index m denotes the
reference frame where we represent it (the fixed one).
Notice that the terms “rotated” or “fixed” are only used to give a meaning to a
relative displacement and does not always imply a “real” rotation; we can imagine
as well to leave Rn “fixed” and rotate Rm .
We can build Rnm , instead of Rm
n using similar arguments.
In conclusions, we have
and
i Tm i n
j Tm i n
k Tm i n
T
Rm
n = i mj n
j Tm j n
k Tm j n
i Tm k n
j Tm k n
k Tm k n
i Tn i m
j Tn i m
k Tn i m
T
Rnm =
i n j m
j Tn j m
k Tn j m
i Tn k m
j Tn k m
k Tn k m
and, by inspection,
n T
Rm
n = (R m )
(2.22)
Since the matrix Rm
n describes a rigid rotation around an axis that goes through
the common origin of two reference frames, this matrix is therefore called rotation
matrix.
Equation (2.22) shows that the inverse rotation from n to m is represented by the
transpose of the matrix that represents the rotation from m to n. A matrix whose
inverse is equal to its transpose is called orthonormal (or, as in some textbooks,
orthogonal). All rotation matrices are orthonormal matrices, whose properties
have been described in Appendix B.7.1
Now we consider two vectors, the first one indicated as v nP is the representation of a
geometrical point P in Rn , while v nAB = v nB −v nA is the representation of an oriented
−→
segment AB in Rn .
Basilio Bona - Dynamic Modelling
25
We want to know how to represent both in the reference frame Rm . It turns out
that the formula is:
m n
vm
P = Rn v P
m n
and v m
AB = R n v AB
i.e., when the reference frame origins are the same, both types of vectors transform
in the same way
n
v m = Rm
(2.23)
nv
and conversely
T m
v n = Rnm v m = (Rm
n) v
(2.24)
We conclude that a rotation is represented by a square matrix and the rotation
operator applied to a vector is
Rot(v , R) = Rv
In conclusion, when a generic (orthonormal) rotation matrix Rm
n is considered, all
of the three following characterizations are true
1. Rm
n represents a geometrical rotation Rot(u, θ) of an angle θ around an axis
whose unite vector is given by u (θ > 0 is given by the right-hand-rule), that
brings Rm to overlap with Rn (from m “fixed” a n “rotated” or “mobile”).
The value of the angle θ and the components of u do not appear immediately
from the matrix elements, but we can compute them, as shown in Section
2.8.1;
2. Rm
n characterize the description of the unit basis of Rn in Rm (frame n “rotated” or “mobile” in the frame m “fixed”);
3. Rm
n is the representation of the linear operator that transforms a vector from
the reference frame Rn (“rotated” or “mobile”) into the reference frame Rm
(“fixed” ).
The rotation operator is linear, since it is represented by a matrix that obeys tot
the following property
m
m
m n
m n
n
n
Rot(Rm
n , λ1 v 1 + λ2 v 2 ) = λ1 R n v 1 + λ2 R n v 2 = λ1 Rot(R n , v 1 ) + λ2 Rot(R n , v 2 )
If we need to make more than one rotation, each one represented by a matrix
Rot(u i , θi ) = Ri−1
with respect to the reference frame obtained by the previous
i
rotation, the total rotation is given by the ordered product of the rotation operators,
as
Rot(u 1 , θ1 )Rot(u 2 , θ2 ) · · · Rot(u N , θN ) = Rot(u, θ)
(2.25)
26
Basilio Bona - Dynamic Modelling
It is very important to note that the total angle θ is not the sum of the single angles
θ ̸= θ1 + θ2 + · · · + θN
and the same applies for the unit vector u
u ̸= u 1 + u 2 + · · · + u N
The matrix representing the global rotation is the ordered product of the single
matrices
N
∏
0 def
0 1
N −1
Rot(u, θ) ⇔ RN = R1 R2 · · · RN =
Rk−1
(2.26)
k
k=1
Since matrix product does not commute (apart from some particular cases, that we
will see later), the factors order is important. The upper index of a rotation matrix
shall be equal to the lower index of the preceding matrix (on its left). We will see
in Section 2.10.2 that the order of the product is connected to a precise geometrical
concept and we will provide a simple mnemonic rule to remember it.
2.7.1
Elementary Rotations
We call elementary rotations or basic rotations the rotations that take place
around some particular axis; the first one is the matrix that represents a rotation of
[
]T
an angle θ around a generic axis, defined by the unit norm vector u = u1 u2 u3
with∥u∥ = 1:
Rot(u, θ) ≡ R(u, θ) ≡ Ru,θ
2
u1 (1 − cθ ) + cθ
u1 u2 (1 − cθ ) − u3 sθ u1 u3 (1 − cθ ) + u2 sθ
def
u22 (1 − cθ ) + cθ
u2 u3 (1 − cθ ) − u1 sθ (2.27)
= u1 u2 (1 − cθ ) + u3 sθ
u1 u3 (1 − cθ ) − u2 sθ u2 u3 (1 − cθ ) + u1 sθ
u23 (1 − cθ ) + cθ
where we have adopted the following conventions
def
sθ = sin θ
def
cθ = cos θ
The determinant is
det R(u, θ) = 1
while the trace is
tr R(u, θ) = (1 − cθ )(u21 + u22 + u23 ) + 3cθ
(2.28)
Other basic rotation are those around the x, y and z axes; in these case u is given
by the basis unit vectors i , j e k , as follows:
Basilio Bona - Dynamic Modelling
27
• Rotation around the x axis of an angle α:
Rot(x, α) ≡ Rot(i , α) ≡ R(i , α) ≡ Ri ,α
1 0
0
def
= 0 cα −sα (2.29)
0 sα c α
• Rotation around the y axis of an angle β:
Rot(y, β) ≡ Rot(j , β) ≡ R(j , β) ≡ Rj ,β
cβ 0 sβ
def
= 0 1 0 (2.30)
−sβ 0 cβ
• Rotation around the z axis of an angle γ:
Rot(z, γ) ≡ Rot(k , γ) ≡ R(k , γ) ≡ Rk ,γ
cγ −sγ 0
def
= sγ cγ 0 (2.31)
0
0 1
where
def
sα = sin α;
def
cα = cos α;
def
sβ = sin β;
cβ = cos β;
def
sγ = sin γ;
cγ = cos γ
Example 2.7.1
We want to compute the matrix representing the basic rotation around an axis given
by the vector
0
v = 1
1
The corresponding unit vector is
u=
0
1
v
√
=
∥v ∥ 2
√1
2
Now, using (2.27) we have:
1
−√
0
2
1
1
R(u, π/2) = √
2
2
1
1
−√
2
2
1
√
2
1
2
1
2
(2.32)
28
Basilio Bona - Dynamic Modelling
We can check that the determinant of R is equal to +1
(
)(
))
(
1
1
1
1+2
√ − − √
det R(u, π/2) = (−1)
−√
2
2 2
2 2
(
)(
(
))
1
1
1
2+2
√
√ − − √
+ (−1)
2
2 2
2 2
1 1 1 1
= + + +
4 4 4 4
=1
(2.33)
and that
1 1
+ =1
2 2
Considering relation (2.28), given later, we have
tr R =
tr R = 1 + 2 cos θ
from which
cos θ = 0
→
θ = ±π/2
From a simple inspection of the matrix in (2.29) we notice that it obeys to the
following relations:
R(u, θ) = R(−u, −θ)
R(u, −θ) = R(u, 2π − θ) = R(−u, θ)
R(u, θ) = [R(u, −θ)]T
(2.34)
R(−u, −θ) = [R(−u, θ)]T
R(u, θ1 )R(u, θ2 ) = R(u, θ1 + θ2 )
We recall again that the sign of the rotation angle is given by the right-hand-rule,
When we change the direction of the vector u, if we want to represent the same
physical rotation we have to change also the sign of the angle θ; on the contrary we
will obtain the inverse rotation, represented by the transpose matrix.
Example 2.7.2
We want to compose two different rotations, represented by the following matrices,
in the stated order
0.7071
0
0.7071
0
1.0000
0
R(j , 45◦ ) =
−0.7071
0
0.7071
Basilio Bona - Dynamic Modelling
and
29
0.5000 −0.8660
0
0
R(k , 60◦ ) = 0.8660 0.5000
0
0
1.0000
We have
0.3536 −0.6124 0.7071
0.5000
0
Ra = R(j , 45◦ )R(k , 60◦ ) = 0.8660
−0.3536 0.6124 0.7071
(2.35)
While, exchanging the order we have
0.3536 −0.8660 0.3536
0.5000 0.6124
Rb = R(k , 60◦ )R(j , 45◦ ) = 0.6124
−0.7071
0
0.7071
(2.36)
with
Ra ̸= Rb
2.7.2
Planar rotations
If the motion takes place in a plane, it is customary to define the plane with the
common reference frame, where i is horizontal, j is vertical and k is orthogonal to
the plane and points toward the eyes of the reader. In this context, all rotations
are around the unit vector k (positive counterclockwise) as in Figure 2.10, and the
rotation matrices can be written as
cγ −sγ 0
sγ cγ
0
0 0
1
or simply as
[
cγ −sγ
sγ cγ
]
In this case the matrix product commutes, since, according to the last of (2.34)
[
cθ −sθ
sθ c θ
][
]
] [
][
] [
cθ+γ −sθ+γ
cγ −sγ cθ −sθ
cγ −sγ
=
=
sθ+γ cθ+γ
sθ c θ
sγ cγ
sγ cγ
30
Basilio Bona - Dynamic Modelling
Figure 2.10: A planar rotation of an angle θ.
2.8
The Rotation Matrix
In the following Section we will define the main mathematical properties of the
rotation matrices. A detailed description can be found in several textbooks, as
[1, 3, 5, 13, 17, 31, 32, 34, 35, 39, 41, 48, 52].
A generic rotation matrix is always square and orthonormal, and its properties have
been described in B.7.1.
It is interesting to note that the translations, the rotations and the reflexions are
all members of a the set of the so-called isometries, i.e., those transformations of
the three-dimensional space that keep constant the Euclidean distance d(P, Q) =
∥xP − xQ ∥ between every couple of points belonging to a rigid body. Among the
isometries there is also the so-called glide, i.e., a reflexion followed by a translation.
However, among the isometries that are represented by orthogonal matrices, we are
interested only in the rotations, since the reflections are nota applicable to rigid
bodies: your left hand cannot be transformed into your right hand.
2.8.1
Rotation Matrix Properties
All rotations, also called proper rotations, are expressed by square orthonormal
matrices R with determinant det R = +1; if det R = −1 the matrix represents a
reflexion, also called roto-reflections.
According to the Euler theorem any rotation or composition of more rotations is
always represented by a single matrix R(u, θ). The subspace represented by u has
dimension 1, and is invariant with respect to the rotation (since the point on it do
Basilio Bona - Dynamic Modelling
31
not rotate); hence one can write
Ru = u
(2.37)
This relation correspond to the classic definition of the eigenvalues of a matrix
Ru = λu
with λ = 1.
A proper rotation R has the following canonical modal decomposition
1 0
0 [
[
]
]H
R = M ΛM H = u v v ∗ 0 ejθ 0 u v v ∗
0 0 e−jθ
def
where j =
(2.38)
√
−1 and M H is the hermitian matrix (i.e., conjugate-transpose) of M .
In (2.38) the matrix M is the modal matrix, i.e., the matrix of the eigenvalues of R;
as said above, u identifies the rotation axis, while v and v ∗ define the plane normal
to u.
On this plane we have a planar rotation that can be represented by the complex
rotation operator (also called a phasor)
def
ejθ = cos θ + j sin θ
The right-handed reference frame
R(u, Re(v ), Im(v ))
has i = u, while the other two basis unit vectors are j = Re(v ) and k = Im(v ).
The determinant is
det R = 1 · ejθ · e−jθ = +1
as we already knew, while the trace is
tr R = 1 + (cos θ + j sin θ) + (cos θ − j sin θ) = 1 + 2 cos θ
that is equal to (2.28) for ∥u∥ = 1
If we introduce S (u) as the skew-symmetric matrix
0 −u3 u2
0 −u1
S (u) = u3
−u2 u1
0
(2.39)
R obeys to the following relations:
def
def
R(u, θ) = eS (u)θ = I +
sin θ
1 − cos θ 2
S (u) +
S (u)
∥u∥
∥u∥2
(2.40)
32
Basilio Bona - Dynamic Modelling
R(u, θ)T = e−S (u)θ = I −
def
def
sin θ
1 − cos θ 2
S (u) +
S (u)
∥u∥
∥u∥2
2
−u2 − u23
u1 u2
u1 u3
−u21 − u23
u2 u3
S 2 (u) = u1 u2
u1 u3
u2 u3
−u21 − u22
where
(2.41)
(2.42)
The two formulas (2.40) and (2.41) are very important, since they define in the most
general way the rotation matrix as an exponential of an anti-symmetric matrix;
we omit the proof since it requires some notion of differential geometry, and in
particular, of the Lie algebras; the interested reader can look at the textbook [34]
for further elements.
Notice that a planar rotation is represented by
ejθ
while a tridimensional rotation is represented by
eS (u)θ
2.8.2
Rotation Matrix Parametrization
We are now able to solve the following two problems
Problem 1
Given the rotation matrix R, compute the rotation angle θ and the unit vector u.
Solution
The angle θ is computed according to (2.28)
(
)
tr (R) − 1
θ = ± arccos
2
(2.43)
The sign ambiguity in arccos cannot be avoided, being implicit in the inverse trigonometric formulas.
The unit vector u could be obtained from the eigenvector relative to the unit eigenvalue of R:
Ru = 1u
(2.44)
The rotation axis, without the positive direction information, can be computed also
from any non zero column of the following matrix
(
)
R + RT − (tr (R) − 1) I .
(2.45)
Basilio Bona - Dynamic Modelling
33
However this procedure does not allow to link the choice of the sign in ± arccos(·)
with the positive verse of θ, because of the ambiguity that comes from the solution
of the eigenvector computation; indeed (2.44) allows to compute only the subspace
spanned by the eigenvector, but not its positive direction. We cannot therefore be
a-priori sure that this eigenvector is coherent with the sign of θ, and we need to
make an a-posteriori check.
To solve this ambiguity it is better to follow a more complex method, that makes
sure that the angle sign and the positive direction of u are coherent.
The angle θ is computed following (2.43), with any choice of the sign; at this point
one defines a symbolic skew-symmetric matrix S (u) according to (2.39), and numerically compute S (u) subtracting (2.41) from (2.40):
S (u) =
)
∥u∥ (
R − RT .
2 sin θ
(2.46)
the components ui are obtained equating term by term the elements of the symbolic
matrix (2.39) with those obtained from (2.46).
As one can see, when R is symmetric, S (u) in (2.46) is zero. One can proceed
considering two cases:
Case 1. R = RT = I
S (u) is not determined since sin θ = 0 ± 2kπ; by convention θ is set to zero
and u is undetermined, since no rotation occurs.
Case 2. R = RT ̸= I
From the orthogonality properties of R follows that RT R = RR = R2 = I .
This means that after two rotations of the angle θ around u the orientation is
the starting one; this gives 2θ = 2π, therefore one sets θ = π.
To compute u one builds S 2 (u) as the sum of (2.40) and (2.41):
∥u∥2
S =
1 − cos θ
2
(
R + RT
−I
2
)
(2.47)
and then applies
u21 u1 u2 u1 u3
S 2 + ∥u∥2 I = uu T = u2 u1 u22 u2 u3
u3 u1 u3 u2 u23
(2.48)
in order to compute the components of u, equalling the numerical values of
(2.47) with the corresponding symbolic terms in (2.48).
34
Basilio Bona - Dynamic Modelling
Problem 2
T
u1
Given the rotation axis represented by u = u2 and the angle θ, compute R.
u3
Solution
One computes the skew-symmetric matrix S (u), from the known components of u,
then computes the norm ∥u∥ and after thatthe matrix R according to (2.40).
Now we present some examples to illustrate the various procedures.
Example 2.8.1
Let’s take Rb obtained from Example 2.7.1.
0.3536 −0.8660 0.3536
0.5000 0.6124
Rb = R(k , 60◦ )R(j , 45◦ ) = 0.6124
−0.7071
0
0.7071
(2.49)
and compute the corresponding u and θ.
We start computing θ from (2.43)
(
)
tr (R) − 1
1.5607 − 1
θ = ± arccos
= ± arccos
= ±73.7◦
2
2
then we obtain u from (2.45), as
(
)
A = R + RT − (tr (R) − 1) I
It results
0.1464 −0.2537 −0.3536
0.6124
A = −0.2537 0.4393
−0.3536 0.6124
0.8536
Once normalized, the three columns are respectively
0.3190
−0.3190
v 1 = −0.5525 v 2 = v 3 = 0.5525
−0.7701
0.7701
Now, in order to decide if the rotation axis is v 1 or v 2 one should do the a-posteriori
check, computing both
0.3536 0.6124 −0.7071
0
R(v 1 , θ) = R(v 2 , −θ) = −0.8660 0.5000
0.3536 0.6124 0.7071
Basilio Bona - Dynamic Modelling
35
and
R(v 1 , −θ) = R(v 2 , θ) = R(v 1 , θ)T = R(v 2 , −θ)T
We observe that
Rb = R(v 1 , −θ) = R(v 2 , θ)
hence we have at the end
−0.3190
u = v 2 = 0.5525
0.7701
and θ = +73.7◦
Now we use the other approach using the skew-symmetric matrix from (2.46); we
have already computed the angle θ = ±73.7◦ and we choose, for instance, the
negative sign, so that θ = −73.7◦ .
If we now assume ∥u∥ = 1, we have the equality between the symbolic (2.39) and
the numerical form (2.46)
0 −u3 u2
0
0.7701 −0.5525
0
−0.3190
0 −u1 = −0.7701
S (u) = u3
0.5525 0.3190
0
−u2 u1
0
By inspection of the elements of S (u) we have
u1 = 0.3190;
u2 = −0.5525;
u3 = −0.7701
but, considering that Rot(u, θ) = Rot(−u, −θ), we obtain the same results as the
previous method, with no need to perform the sign check between θ and u.
Example 2.8.2
We want to compute the rotation matrix R representing a rotation around the axis
[
]T
u = √13 √13 √13 of θ = 120◦
We compute the two matrices S e S 2
0 −1 1
1
0 −1 ;
S=√ 1
3 −1 1
0
−2 1
1
1
S 2 = 1 −2 1
3
1
1 −2
e successivamente calcoliamo R secondo l’equazione (2.40) ottenendo
0 0 1
R = 1 0 0
0 1 0
36
Basilio Bona - Dynamic Modelling
Example 2.8.3
Given
0 0 1
R = 1 0 0
0 1 0
(2.50)
we want to compute u and θ.
The eigenvector (with non-unit norm) relative to the unit eigenvalue of R is u =
[
]T
λ 1 1 1 , as one can obtain from the equation
u1
u3 = u1
1
u1
0 0 1
1 0 0 u2 = u2 ⇒ u1 = u2 ⇒ u = λ 1
u3
u2 = u3
1
u3
0 1 0
Using equation (2.45) we would have obtained the same results, since
1 1 1
(R + RT ) − (tr (R) − 1)I = 1 1 1
1 1 1
The angle θ is computed as
( )
2π
1
=±
= ±120◦ .
± arccos −
2
3
( )
If we assume, for example, θ = − arccos − 12 = −120◦ , from (2.27) we would have
obtained
0 1 0
R = 0 0 1
1 0 0
that is not equal to the initial matrix (2.50).
◦
So we use
√ the method of the skew-symmetric matrix, after choosing θ1 = 120 ,
3
sin θ1 =
. From (2.46) we compute
2
0 −1 1
(
)
1
1
0 −1
S (u 1 ) = √ R − RT = √ 1
3
3 −1 1
0
[
]T
1
obtaining u 1 = λ 1 1 1 , with λ = ∥u 1 ∥ = √ .
3
√
3
Should we have assumed θ2 = −120◦ , sin θ2 = −
, we would have obtained
2
0
1
−1
)
1 (
1
1
S (u 2 ) = − √ R − RT = − √ −1 0
3
3 1 −1 0
[
]T
and consequently u 2 = λ −1 −1 −1 = −u 1 .
Basilio Bona - Dynamic Modelling
37
Example 2.8.4
Given the matrix
0
0 −1
R = 0 −1 0
−1 0
0
we want to compute u and θ; we observe that R is symmetric and
R = RT ̸= I
therefore we use relation (2.47) and (2.48). We know that in this case θ = π and
cos θ = −1. Taking a unit norm vector u we compute
(
)
−1 0 −1
2
T
∥u∥
R+R
1
− I = 0 −2 0 ≡ S 2
1 − cos θ
2
2
−1 0 −1
now using (2.47) we obtain
u21 u1 u2 u1 u3
0.5 0 −0.5
0
0
S 2 + ∥u∥2 I = uu T = u2 u1 u22 u2 u3 = 0
2
−0.5 0 0.5
u3 u1 u3 u2 u3
from which one obtains
[√
√ ]T
2
2
u=
0 −
2
2
or
[ √
√ ]T
2
2
−
0
2
2
2.9
Roto-translations
In the previous Sections we have detailed the representation of both translations
and rotations; now we are ready to combine them in a single operator, the so called
rototranslation or roto-translation operator.
We take two reference frames, one identified as R0 the other identified as Rm ,
initially with common origins O and coinciding axes. For simplicity, R0 identifies
the “fixed” frame, while Rm identifies the “mobile” frame; as already noted above,
these two terms are used only for ease of explanation, in order to apply the rototranslation to Rm and characterize it with respect to R0 .
In addition we consider a geometrical point P , attached to Rm and represented by
−→
m
the vector v m
P ; we consider also a physical vector AB represented by v AB .
Now we want to apply a roto-translation to Rm , defined as follows
38
Basilio Bona - Dynamic Modelling
• a rotation of an angle θ around the axis u going thought the common origin
O; the rotation is represented by the matrix Rot(u, θ) = R0m
• a translation of the origin of Rm with respect to the origin of R0 ; the translation is represented in R0 by the vector t 0m .
If we want to compose rotations and translations (and rotations with rotations, as
well) in a proper order, we should give additional information, namely
• The order of the various displacements: what do you apply first, the translation
or the rotation?
• The reference frame with respect to which the displacement is performed: you
do it with respect to the fixed frame or with respect to the mobile frame?
Indeed, because of the previous displacements, the two reference frames do
not coincide any more.
According to the two decision we have four possible choices, considering that the
first displacement is made indifferently with respect to the fixed or mobile frame,
since they coincide.
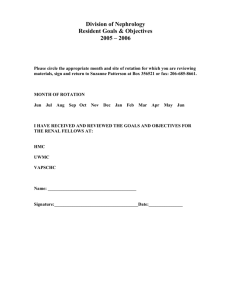
a) First perform a rotation of the initial reference frame around the common
origin, then perform a translation with respect to the axes of the fixed frame
as in Figure 2.11 a), for a simple planar case.
b) First perform a rotation of the initial reference frame around the common
origin, then perform a translation with respect to the axes of the mobile
frame as in Figure 2.11 b).
c) First perform a translation of the initial reference frame, then perform a
rotation around the origin of the mobile frame as in Figure 2.11 c).
d ) First perform a translation of the initial reference frame, then perform a
rotation with respect around the origin of the fixed frame as in Figure 2.11
d ).
As illustrated in Figure 2.11, the two cases a) and c) produce the same final rototranslation, while case b) and d ) produce a different one.
m
Now we consider the two vectors v m
P and v AB ; since they are “attached”, to the
mobile frame Rm , before the displacement their representation is
v 0P = v m
P
and v 0AB = v m
AB
while after the displacement they will assume a different representation in R0 , and
precisely
Basilio Bona - Dynamic Modelling
Figure 2.11: Diversi modi di effettuare una rototraslazione planare.
39
40
Basilio Bona - Dynamic Modelling
• In the two cases a) and c) we have
v 0P = R0m v m
+t
| {z P}
{z }
| Rot
(2.51)
Transl
and
v 0AB = R0m v m
AB
where R0m is the rotation matrix between R0 e Rm (i.e., Rm represented in
R0 ) and t is the translation vector from R0 to Rm , represented in R0 .
• In the two cases b) and d ) we have
0 ′
v 0P = R0m (v m
+ t ′ ) = R0m v m
P + Rm t
| P {z }
Trasl }
|
{z
(2.52)
Rot
and
v 0AB = R0m v m
AB
but now t ′ is the translation vector from R0 to Rm , represented in Rm , that
becomes R0m t ′ when represented in R0 .
First you notice that the “physical” vector v m
AB does not translate, but only change
0 m
its representation and becomes Rm v AB due to the rotation of the reference frame;
this is correct, since a change of reference frames does not change a force, a torque,
a velocity, etc. except for their representations.
Second, you see that the results are different; therefore it is necessary to solve any
ambiguity that may arise. We will see in Section 2.10.2 a simple mnemonic rule to
perform roto-translations in correct order.
Esempio_4-12
COMPLETARE
Inserire esempio di rappresentazione vettoriale da Matlab see Figure xxx.
2.10
Homogeneous Coordinates
We have seen in the previous Section that a rotation operator corresponds to a
matrix product, while a translation operator corresponds to a vector sum. It is
possible to use a unique operator for translations and rotations if we introduce the
Basilio Bona - Dynamic Modelling
41
FARE FIGURA
Figure 2.12: An example of vector transformations between two rotated frames.
so-called homogeneous coordinates or, with a less common term, perspective
coordinates.
They come from the projective and epipolar geometry and find their use in many
different contexts as computer graphics [41] and 3D vision systems [47]. The interested reader can find a detailed description of projective/epipolar geometry and its
applications to computer vision in [10, 11, 19, 37, 44].
Given a point P in a 3D space, its homogeneous representation is given by the
associated 4 × 1 homogeneous vector xe , defined as
λp1
p1
λp
def
2
p2
ve =
=
λ
(2.53)
λp3
p3
λ
1
where λ ∈ R is a scale factor; in the following this factor will be set to 1, giving
origin to the homogeneous coordinates representation commonly adopted to study
the rigid roto-translations in the 3D space,
p1
p2
def
(2.54)
ve =
p3
1
Now, considering again Eqn. (2.51), written in a simpler form
v 0 = R0m v m + t
we notice that it can be written as
0
ṽ =
T 0m ṽ m
[
] [ m]
v
R0m t
=
1
0T 1
(2.55)
42
Basilio Bona - Dynamic Modelling
As one can see from the previous relation, a roto-translation, i.e., a rotation plus a
translation is represented by a 4 × 4 homogeneous matrix (HM)
[
def
T 0m =
]
R0m t
0T 1
(2.56)
where R0m and t are the rotation and the translation, respectively, and
]
def [
0T = 0 0 0
2.10.1
Homogeneous Transformations
We can define two basic homogeneous transformations, namely, the pure rotation
[
]
R 0
def
T (R) ≡ T R =
(2.57)
0T 1
and the pure translation
[
I t
T (t) ≡ T t = T
0 1
]
def
(2.58)
The generic homogeneous transformation in (2.56) can be obtained as the product
of a pure translation and a pure rotations as in
]
] [
][
[
R t
I t R 0
(2.59)
= T
T = TtTR = T
0 1
0 1 0T 1
Reversing the factors order one obtains
[
R
′
T = T RT t = T
0
a different HM
][
] [
]
0 I t
R Rt
= T
1 0T 1
0
1
(2.60)
We have already given in (2.55) the rule for transforming the representation of a
geometrical point from Rm to R0 using the homogeneous coordinates; in brief:
1. We build the HM T 0m from R0m and t 0m in the right order: (2.59) or (2.60);
em
2. We write v m
P as in (2.54);
P in homogeneous coordinates v
3. We compute ve 0P as
ve 0P = T 0m ve m
P
4. We transform back from homogeneous coordinates to vector form ve 0P in v 0P .
Basilio Bona - Dynamic Modelling
43
It is important to notice that homogeneous vectors do no follow the classical sum
or difference rules, since
x1 + y1
x2 + y2
e ̸=
xe + y
x3 + y3
2
For this reason we introduce the homogeneous sum operator, denoted by ⊕, and
the homogeneous difference operator, denoted by ⊖, respectively defined as:
[
]
[
]
x +y
x −y
e=
e=
xe ⊕ y
xe ⊖ y
(2.61)
1
1
Moreover these operators are not distributive, since:
e ) ̸= T xe ⊕ T y
e
T (e
x ⊕y
e ) ̸= T xe ⊖ T y
e
T (e
x ⊖y
(2.62)
Relations (2.62) are important only for their use on geometrical vectors, as ve P ;
m
m
indeed when we have to do with oriented segments (physical vectors) v m
AB = v B −v A ,
one can use the homogeneous difference, as in
m
m
m
m
em
ve 0AB = T ve m
B ⊖ Tv
A = Rv B + t − Rv A − t = R(v B − v A )
(2.63)
or the usual difference, as in
[
ve 0AB
=
T (e
vm
B
−
ve m
A)
]
m
vm
m
B − vA
=T
= R(v m
B − vA)
0
Inverse Homogeneous Matrix
The generic HM T consists of two factors: a 3 × 3 submatrix R (the rotation
operator) and a 3 × 1 vector t (the translation operator).
For this reason the inverse matrix is not simply its transpose, but (see also Figure
2.13):
[ T
]
R −RT t
−1
[T ] =
(2.64)
0T
1
It follows that, while the inverse rotation matrix is its transform, the inverse translation is t ′ = −RT t; this has an immediate geometrical meaning: the minus sign
changes the orientation of the transaction vector and RT t is the representation in
Rm of the original t, that was represented in R0 ).
Example 2.10.1
44
Basilio Bona - Dynamic Modelling
Figure 2.13: La trasformazione omogenea diretta e inversa tra due sistemi di riferimento.
[
]T
Given the physical vector v 0AB = v 0B − v 0A , represented in R0 , with v 0A = 0 0 1
[
]T
m
m
and v 0B = 1 0 0 , we want to compute its representation v m
AB = v A − v B in
Rm , where
0 −1 0 1
1
0 0 1
.
T 0m =
0
0 1 1
0
0 0 1
We have to find the inverse of T 0m as
( 0 )−1
Tm
0 = Tm
0
−1
=
0
0
Now using (2.63) we have:
0 1 0 −1
0
0 1
−1
0
0
1
0
−1
0
⊖
ve 0AB =
0 0 1
1
1
0 0
0 0 0
1
1
0 0
0
0
hence v AB = 1.
1
1
0
0
0
0 −1
0
1
;
1
1
0
1
0 −1 1
−1
−1
0
0 1 0 1
0
1
= ⊖ =
1
1 0 2 1 1
0
1
1
1
1
1
Basilio Bona - Dynamic Modelling
The same results can be obtained computing
segment:
0
)
( 0
0
−1
v 0AB = Rm
v
−
v
=
0
B
A
0
45
directly the rotation of the oriented
1 0
−1
0
0 0 0 = 1
0 1
1
1
2.10.2
Composition Rule for Roto-Translations
It is possible to perform any number of roto-translations obtaining a final rototranslation as the ordered product of the single displacements; it is therefore necessary to organize the product terms in the correct sequence.
We assume to start with two reference frames, for simplicity one called “fixed”,
the other “mobile”, that are related by a homogeneous transformation T . The we
want to execute n generic displacements, each one represented by the related matrix
T i , i = 1, . . . , n.
To perform in the correct order the various matrix products we must apply the
following rules.
We call T (i) the matrix product obtained after the first i-th displacements
1. Set i = 0 and initialize T (0) = T .
2. If the i-th roto-translation T i is defined with respect to the fixed reference
frame, one should pre-multiply the previous matrix T (i − 1) by T i ; the
result will be
T (i) = T i T (i − 1)
Mnemonic Rule: pre-fix(ed)
3. If the i-th roto-translation T i is defined with respect to the mobile reference
frame, one should post-multiply the previous matrix T (i − 1) by T i ; the
result will be
T (i) = T (i − 1)T i
Mnemonic Rule: post-mob(ile)
These rules are valid also for the product composition of rotation matrices. For the
composition of translations alone, since the sum is commutative, the order is not
important.
Observing again Figure 2.11 we can interpret the results as follows
46
Basilio Bona - Dynamic Modelling
• Figure 2.11 a)
It represents a rotation around the common origin of the two reference frames,
followed by a translation with respect to the fixed frame
T (0) = I ,
T (1) = T R ,
x
T (2) =T t T R
• Figure 2.11 b)
It represents a rotation around the common origin of the two reference frames,
followed by a translation with respect to the mobile frame
T (0) = I ,
T (1) = T R ,
y
T (2) =T R T t
• Figure 2.11 c)
It represents a translation with respect to the original frame followed by a
rotation around the origin of the mobile frame
T (0) = I ,
T (1) = T t ,
y
T (2) =T t T R
• Figure 2.11 d )
It represents a translation with respect to the original frame followed by a
rotation around the origin of the fixed frame;
T (0) = I ,
T (1) = T t ,
x
T (2) =T R T t
It is evident that we can interpret the final result T (2) in two different ways, that
differs only by the verbal description associated with their description. For instance,
considering case a) and c), i.e.,
T (2) = T t T R
we can give two different linguistic description, that nevertheless produce the same
final result
• a rotation with respect to the original frame followed by a translation with
respect to the fixed frame (rule pre-fix)
• a translation with respect to the original frame followed by a rotation with
respect to the mobile frame (rule post-mob)
In conclusion, it is worth noticing again that a HM as T 0m represnts a “mobile” frame
Rm with respect to a “fixed” frame R0 ; the 3 × 3 rotation submatrix represents the
mobile reference frame with respect to the fixed one, while the last column part
provides the translation of the origin. All components are expressed in R0 .
Basilio Bona - Dynamic Modelling
47
Example 2.10.2
We want to compute the HM T 0m representing the frame Rm obtained rotating the
fixed[ frame around
the basis unit vector i of an angle +90◦ , followed by a translation
]
t = 0 2 0 along the y axis of the resulting (mobile) frame, followed by a rotation
around the axis z of the fixed reference frame of an angle −90◦ .
We have three displacements defined by the following HM:
First displacement = rotation:
1
0
0
[
]
0 0 −1 0
R(i , 90◦ ) 0
◦
T 1 = T (R(i , 90 )) =
=
0 1 0
0T
1
T
0
1
Second displacement = translation:
I
T 2 = T (t) =
0T
0
2
0
1
Third displacement = rotation:
0
1
0
]
[
−1 0 0 0
R(k , −90◦ ) 0
◦
=
T 3 = T (R(k , −90 )) =
0 0 1
0T
1
T
0
1
The composition rule is: first T 1 , then post-product by T 2 , then pre-product by
T 3:
T 0m = T 3 T 1 T 2
0 1 0 0 1
−1 0 0 0 0
=
0 0 1 0 0
0 0 0 1 0
0 1 0 0 1
−1 0 0 0 0
=
0 0 1 0 0
0 0 0 1 0
0 0 −1 0
−1 0 0 0
=
0 1 0 2
0 0 0 1
0 0 0
1
0 −1 0 0
1 0 0 0
0 0 1
0
0 0 0
0 −1 0
=
1 0 2
0 0 1
0
1
0
0
0
0
1
0
0
2
=
0
1
48
Basilio Bona - Dynamic Modelling
Example 2.10.3
[
]T
A geometrical point P is represented in Rm by v m = 4 3 2 ; Rm is translated
[
]T
by t = −3 0 7 and then rotated according to
0 −1 0
0
R = 1 0
0 0 −1
with respect to the new frame. Find the components of P in R0 .
T 0m is obtained post-multiplying the translation operator by the rotation operator,
as
0 −1 0
−3
0 −1 0
−3
0 −1 0
0
0
0
I
0 −1 0
T 0m =
=
0
0 −1
7 0
0 −1
7
0T
1
0T
1
0T
1
|
{z
}|
{z
}
rotation
translation
At this point one computes the homogeneous representation of the transformed
vector as
0 −1 0
−3
4
−6
−1 0
0
0 3 −4
ve m =
=
0
0 −1
7 2 5
0T
1
1
1
obtaining
vm
−6
= −4
5
2.11
Rigid Body Representation
A rigid body B in a 3D space can be simply represented by a right hand reference
frame RB associated to it; it is not strictly necessary that the frame lies inside the
body or on its surface, but it must be rigidly joined to it.
We call pose of a rigid body the set parameters that uniquely define its position and
its orientation in R3 . As we will detail in a successive Section, the pose of a rigid
body, not subject to any constraint in R3 is given by three position parameters and
three orientation parameters. In R2 the pose is given by two position parameters
and one orientation parameter.
Basilio Bona - Dynamic Modelling
49
The pose is computed as follows: once the frame RB is given, its pose with respect
to an external reference frame, often called world or (pseudo-)inertial reference
frame R0 can be obtained from the homogeneous transformation T 0B (see Figure
2.14).
Figure 2.14: A rigid body pose is characterized by the relation between the body
frame RB and the world frame R0 .
[
]
R0B t
There are sixteen elements in
=
, but only six are independent, in
0T 1
particular the three elements of the translation vector and only three elements of
the rotation matrix (the rotation matrix is orthonormal, so it is subject to six
constraints).
T 0B
We can now state that the pose of a free rigid body in space is defined by six degrees
of freedom (dof), three related to the position of the origin reference frame that
describes the body, and three related to it the orientation with respect to a world
reference frame. The motion of a rigid body is described by the time equations of
its pose; the study of the pose and its time history defines what we call the body
kinematics. In this Section we will only detail the different ways in which the pose
is described, postponing to successive Sections the characterization of the time laws
involved.
Usually the three position dof’s are chosen as the cartesian coordinates of the origin,
although sometimes it is useful to adopt spherical coordinates (but we will never
use them in these notes). On the contrary, the orientation coordinates are more
complex to choose: we will devote the entire Section 2.12 to describe the various
possible parameterizations of orientation; for the moment we will call refer to these
50
Basilio Bona - Dynamic Modelling
[
]T
three numbers as the “vector” α = α1 α2 α3 . The body pose is therefore
formally defined as
p1 (t)
x1 (t)
p2 (t) x2 (t)
]
p3 (t) x3 (t) [
x (t)
def
p(t) =
=
=
α(t)
p4 (t) α1 (t)
p5 (t) α2 (t)
p6 (t)
α3 (t)
(2.65)
The first three components arranged in the vector x , that is a true vector, i.e., a
geometrical vector, that can be subject to all the vector operations, while the second
three components that describe the orientation, arranged in α do not formally obey
to the vector rules, since the “sum” of two orientations α and β is obtained by the
[
]T
product of two rotation matrices and not by the sum α1 + β1 α2 + β2 α3 + β3
α → R(α)
β → R(β)
}
⇒ R(α)R(β) = R(γ) ⇒ γ
So it is not possible to consider p a vector, and the operations as sum and scalar
product have no sense. This fact come from the formal definition of the quantities
involved: indeed
p ∈ R3 × SO(3),
x ∈ R3 ,
with
α ∈ SO(3)
where R3 is the real vector space of dimension 3, and SO(3) is the special orthonormal group of dimension 3, also known as the rotation group; for further
details on this group SO(3), see [34].
Nevertheless the habit to call p a vector is common, and we will continue to refer to
p or α with the term “vector”, since they are organized as a column of real numbers.
With this in mind, we can state that two are the possible representations of a rigid
body in space
1. The vector p(t) defined in (2.65).
2. The homogeneous matrix T (t), defined as:
[
R(t) t(t)
T (t) =
0T
1
def
]
(2.66)
These two representations are equivalent and it is possible to compute one from the
other, as we will show in the next Section.
Basilio Bona - Dynamic Modelling
51
Figure 2.15: Dato p calcolare T .
2.11.1
From Pose to Homogeneous matrix
Given p, we have to compute T , i.e., R and t (see Figure 2.15).
The vector t is simply obtained taking the first three elements of p, i.e., x
p1
t ⇐ p2 ≡ x
p3
(2.67)
We note that this is true only if (as we do) we give the position in cartesian coordinates and not in cylindrical or spherical coordinates; if this is the case it results in
[
]T
general that t = f (x ): as an example, from spherical coordinates x sph = ρ θ ϕ ,
[
]T
to cartesian coordinates x car = xc yc xc , we have
xc = t1 = ρ sin θ cos ϕ = f1 (x sph )
yc = t2 = ρ sin θ sin ϕ = f2 (x sph )
zc = t3 = ρ cos θ = f3 (x sph )
To compute R from α it is necessary to define the physical meaning of the three
components αi of α. We assume that they are three angles characterizing the
orientation of RB in R0 . The most used angles are the so called Euler angles or
the RPY angles, that will be introduced in Section 2.12.2 and 2.12.3, respectively.
It exists a nonlinear function R = g E (αE ) that gives the elements rij of a rotation matrix R from the Euler angles (2.69), and another nonlinear function R =
g RP Y (αRP Y ) that gives the elements rij of a rotation matrix R from the RPY angles
(2.76).
2.11.2
From Homogeneous matrix to Pose
Given T , we have to compute p (see Figure 2.16).
52
Basilio Bona - Dynamic Modelling
The vector x is simply obtained taking the first three elements of the last column
of T
p1
t1
x ≡ p2 ⇐ t2 ≡ t
(2.68)
p3
t3
Figure 2.16: Dato T calcolare p.
Notice that in this way the obtained coordinates are relative to the origin of the
reference frame described by T ; if we need to compute the coordinates of a different
geometrical point, we should characterize this new point as a vector in RB and
transform it using eqn. (2.55).
To compute α from R it is necessary to define the physical meaning of the three
components αi of α. We assume to use the Euler angles or the RPY angles.
It exists the inverse nonlinear function αE = g −1
E (R) that gives the Euler angles
from the elements rij of a rotation matrix R (2.73), and another inverse nonlinear
function αRP Y = g −1
RP Y (R) that gives the RPY angles from the elements rij of a
rotation matrix R (2.77).
The inverse solution, if exists, could be non unique, since a finite number of angles
α may exist that produce the same rotation matrix R. Since inverse trigonometric
functions are involved, we consider as equaivlent solutions those that differ for integer
multiples of 2π.
In the following Section we will illustrate the most used ways to characterize the
orientation of a rigid body in space.
2.12
Orientation Parameters
We have seen that a rotation is a geometrical transformation acting on R3 , defined
by a orthonormal matrix R. At the same time the orientation of a rigid body, with
a local reference frame attached to it, is represented by the rotation of the local
frame with respect to the world or global frame. We conclude that it is equivalent
to speak of the orientation of a rigid body or of its reference frame with respect to
Basilio Bona - Dynamic Modelling
53
some other “fixed” frame
Body B Orientation ⇔ Rotation Matrix RB
We recall that a rotation is characterized by only three parameters, and all the representation described in this section will be a different way to “organize” such param[
]T
eters; in eqn. (2.65) these three parameters were indicated as α = α1 α2 α3 ,
but there are other parameterizations that use more than three parameters, as the
quaternions, introduced in Section 2.12.6. Another example comes from the Euler
theorem, that states that any composition of rotations is always a rotation of an
angle θ around an axis defined by a unit vector u; therefore we can represent a rotation by the set (u, θ), where u has two free parameters, since there is an implicit
constraint ∥u∥ = 1), and the third one coincide with θ. Other authors use a non
unit vector v , whose norm provides the angle value ∥v ∥ = θ.
Now we describe the most common forms used to represent the orientation of a rigid
body in R3 .
2.12.1
Direction Cosines
Direction cosines are nothing else that the rotation matrix R itself. Indeed R
contains in its columns (or rows) the representation of the unit basis vectors of
the local frame with respect to the world frame. This representation needs nine
parameters that must obey to six unit norm orthogonality constraints. In this
[
]T
case the parameters α1 α2 α3 are hidden in R but can be extracted using the
equations (2.12.2) e (2.12.3).
2.12.2
Euler Angles
Historically this is the first representation of the orientation of a body: it associates
to α1 , α2 , α3 three angles, called Euler angles and usually denoted by ϕ, θ, ψ. To
understand how to build the Euler angles it is necessary to define them through an
implicit procedure. The orientation of a mobile reference frame Rm described by
the Euler angles is obtained by three successive rotations around the principal axes,
following a precise rule
First rotation, angle ϕ
Rz,ϕ
cϕ −sϕ 0
≡ R(k , ϕ) = sϕ cϕ 0
0
0 1
rotation of an angle ϕ around the local (mobile) axis z.
54
Basilio Bona - Dynamic Modelling
Second rotation, angle θ
Rx,θ
1 0
0
≡ R(i , θ) = 0 cθ −sθ
0 s θ cθ
rotation of an angle θ around the local (mobile) axis x.
Third rotation, angle ψ
Rz,ψ
cψ −sψ 0
≡ R(k , ψ) = sψ cψ 0
0
0 1
rotation of an angle ψ around the local (mobile) axis z.
Using the rule “pre–fixed” “post–mobile” we compute the complete rotation matrix
based on the Euler angles as
R (ϕ, θ, ψ) ≡ Rz,ϕ Rx,θ Rz,ψ ≡ R(k , ϕ)R(i , θ)R(k , ψ) =
cϕ cψ − sϕ cθ sψ −cϕ sψ − sϕ cθ cψ sϕ sθ
sϕ cψ + cϕ cθ sψ −sϕ sψ + cϕ cθ cψ −cϕ sθ (2.69)
sθ sψ
sθ cψ
cθ
This composition rule is not unique in technical literature, since many textbooks
adopt a slightly different convention: the second rotation around the x axis is replaced by a rotation around the mobile axis y, producing a different “Euler” matrix:
e (ϕ, θ, ψ) ≡ Rz,ϕ Ry,θ Rz,ψ ≡ R(k , ϕ)R(j , θ)R(k , ψ) =
R
−sϕ sψ + cϕ cθ cψ −sϕ cψ − cϕ cθ sψ cϕ sθ
cϕ sψ + sϕ cθ cψ
cϕ cψ − sϕ cθ sψ sϕ sθ (2.70)
−sθ cψ
sθ sψ
cθ
In this notes we will always adopt the first form (2.69), but we recall that in many
aerospace engineering textbooks the form (2.70) is widely used.
The above formulas are also called direct relations, since, given the three Euler
angles they compute the rotation matrix R(ϕ, θ, ψ). The inverse relation, i.e. how
to compute the Euler angles given an generic R matrix is solved considering the
generic elements of a matrix, provided it is orthonormal
r11 r12 r13
(2.71)
R = r21 r22 r23 ,
r31 r32 r33
where the elements rij are known. To obtain the Euler angles it is necessary to solve
Basilio Bona - Dynamic Modelling
55
the following nonlinear equation system:
r11
r12
r13
r21
r22
r23
r31
r32
r33
= cϕ cψ − sϕ cθ sψ
= −cϕ sψ − sϕ cθ cψ
= s ϕ sθ
= sϕ cψ + cϕ cθ sψ
= −sϕ sψ + cϕ cθ cψ
= −cϕ sθ
= s θ sψ
= sθ cψ
= cθ
(2.72)
that has the following generic solution
θ = ± arccos (r33 ) ± 2kπ
( )
r32
ψ = ± arccos
± 2kπ
sθ
)
(
−r23
± 2kπ
ϕ = ± arccos
sθ
(2.73)
Unfortunately this solution presents some drawbacks
1. the inverse trigonometric function arccos(·) is not unique: indeed cos(θ) =
cos(−θ);
2. the solution becomes not definite for r33 = 1, i.e., when sθ = 0; in this case
the angles ϕ and ψ are not uniquely known; only their sum is given;
3. when θ → 0◦ or θ → ±180◦ , the second and the third equations provide inaccurate solutions, since the numeric accuracy of the arccos(·) function depends
on the angle value.
To solve these drawbacks, instead of arccos(·) it is customary to use the function
atan2(y, x), that is available in all the mathematical libraries of the most used
computer languages. It is definite as:
(y)
=
θ = atan2(y, x) = tan−1
x
0◦ ≤ θ ≤ 90◦
if x ≥ 0; y ≥ 0
(2.74)
◦
◦
90 ≤ θ ≤ 180
if x ≤ 0; y ≥ 0
=
−180◦ ≤ θ ≤ −90◦ if x ≤ 0; y ≤ 0
−90◦ ≤ θ ≤ 0◦
if x ≥ 0; y ≤ 0
Moreover, by default, atan2(0, 0) = 0.
56
Basilio Bona - Dynamic Modelling
Using this function, the solution to (2.72) is:
ϕ = atan2 (r13 , −r23 ) ± 2kπ
ψ = atan2 (−cϕ r12 − sϕ r22 , cϕ r11 + sϕ r21 ) ± 2kπ
θ = atan2 (sϕ r13 − cϕ r23 , r33 ) ± 2kπ
(2.75)
Euler angles singularity
We observe that when r33 = 1 the matrix R(ϕ, θ, ψ) is equal to the elementary
matrix R(k , γ), that is function of a single angle. In this case we say that the Euler
representation is singular; from the three possible angles we can obtain only two
angles; from (2.73) we have θ = 0, and the product R(k , ϕ)R(i , θ)R(k , ψ) reduces
to
R(k , ϕ)R(k , ψ) = R(k , (ϕ + ψ))
from which we have γ = (ϕ + ψ); we cannot compute separately the two angles
phi and ψ, but only their sum. This situation is described saying that θ does
not decouple any more the other two rotations and so a singular configuration is
produced.
2.12.3
RPY Angles
Also in the case of Roll-Pitch-Yaw angles (RPY for short) θx , θy , θz it is necessary
to define them through an implicit procedure. The orientation of a mobile reference
frame Rm described by the RPY angles is obtained by three successive rotations
around the principal axes, following a precise rule
First rotation, angle θx
Rx,θx
1 0
0
≡ R(i , θx ) = 0 cθx −sθx
0 sθx cθx
rotation of an angle θx around the world (fixed) axis x.
Second rotation, angle θy
Ry,θy
cθy 0 sθy
1 0
≡ R(j , θy ) = 0
−sθy 0 cθy
rotation of an angle θy around the world (fixed) axis y.
Third rotation, angle θz
Rz,θz
cθz −sθz 0
≡ R(k , θz ) = sθz cθz 0
0
0
1
Basilio Bona - Dynamic Modelling
57
rotation of an angle θz around the world (fixed) axis z.
Using the rule “pre–fixed” “post–mobile” we compute the complete rotation matrix
based on the RPY angles as
R (θx , θy , θz ) ≡ Rz,θz Ry,θy Rx,θx ≡ R(k , θz )R(j , θy )R(i , θx )
cθz cθy sθx sθy cθz − cθx sθz cθx sθy cθz + sθx sθz
def
= cθy sθz sθx sθy sθz + cθx cθz cθx sθy sθz − sθx cθz (2.76)
−sθy
sθx cθy
cθx cθy
The RPY angles are computed applying the same approach adopted for the Euler
angles, yielding:
θx = atan2 (r32 , r33 ) ± 2kπ
θz = atan2 (−cθx r12 + sθx r13 , cθx r22 − sθx r23 ) ± 2kπ
θy = atan2 (−r31 , sθx r32 + cθx r33 ) ± 2kπ
(2.77)
It is interesting to notice that the product R(k , θz )R(j , θy )R(i , θx ) may also be
read in a different order, starting from left to right, i.e., applying the “post-mobile”
rule: first apply a rotation R(k , θz ) around axis z, then apply a rotation R(j , θy )
around mobile axis y, then apply a rotation R(i , θx ) around mobile axis x. The
difference is only in the description of the rotations, not in the final result (2.76),
that is the same.
Other definitions can be found in various textbooks and are sometimes used, for
instance, the following alternative sequence is quite common
1) A rotation R(j , θy ) of θy around the fixed axis y;
2) A rotation R(k , θz ) of θz around the fixed axis z;
3) A rotation R(i , θx ) of θx around the fixed axis x.
The resulting rotation matrix is:
R (θz , θy , θx ) ≡ Rx,θx Ry,θy Rz,θz ≡ R(i , θx )R(j , θy )R(k , θz )
cθy cθz
−cθy sθz
sθy
def
= sθx sθy cθz + cθx sθz −sθx sθy sθz + cθx cθz −sθx cθy (2.78)
−cθx sθy cθz + sθx sθz cθx sθy sθz + sθx cθz
cθx cθy
In this notes we will apply only definition (2.76).
RPY angles singularity
Roll-Pitch-Yaw angles are subject to singularity too, as the Euler angles, and in
general to all three-angles representation.
58
Basilio Bona - Dynamic Modelling
In particular the following relations hold
R(k , θz )R(j , 90◦ ) = R(j , 90◦ )R(i , θz )
(2.79)
R(i , θx )R(j , 90◦ ) = R(j , 90◦ )R(k , θx )
(2.80)
When θy = 90◦ the RPY matrix in (2.76) becomes singular, since from (2.79)
R(k , θz )R(j , 90◦ )R(i , θx ) = R(j , 90◦ )R(i , θz )R(i , θx ) = R(j , 90◦ )R(i , (θx + θz ))
and also the RPY matrix in (2.78) becomes singular, since from (2.80)
R(i , θx )R(j , 90◦ )R(k , θz ) = R(j , 90◦ )R(k , θx )R(k , θz ) = R(j , 90◦ )R(k , (θx + θz ))
Both representation are no more function of three angles, but only of a combination
of two of them; this fact is the cause of the so called gimbal-lockproblem that
occurs in gyroscopes and is well known since the incident on the Apollo 10 Manned
Lunar Spacecraft [22].
2.12.4
Cardan Angles
We have seen in the previous Section that many alternatives are possible in order
to define three rotations. All possible angles are called generically Cardan angles.
Two possible groups of rotations arise: the first group includes the product obtained
by the product of three elementary rotation (all different); we call θ1 , θ2 and θ3 the
three generic Cardan angles involved; Table 2.12.4 list all possible combinations.
The second group includes the product of three rotation matrices, but introducing
only two angles; in this case the Cardan angles are called α, β and γ. Table 2.12.4
list all possible combinations.
Cardan angles singularities
As already noted in Section 2.12.2 and 2.12.3 the sequence of three angles produces
a singularity when a certain pattern of angles appear. For the first group it is the
presence of a 90◦ angles that may produce a singular behaviour, since the following
identities hold
R(i , θx )R(j , 90◦ ) = R(j , 90◦ )R(k , θx )
R(i , θx )R(k , 90◦ ) = R(k , 90◦ )R(j , θx )
R(j , θy )R(i , 90◦ )
= R(i , 90◦ )R(k , θy )
R(j , θy )R(k , 90◦ ) = R(j , 90◦ )R(i , θy )
(2.81)
R(k , θz )R(i , 90◦ ) = R(i , 90◦ )R(j , θz )
R(k , θz )R(j , 90◦ ) = R(j , 90◦ )R(i , θz )
while for the second group it is sufficient that the middle rotation matrix is equal
to the identity to give origin of a singular representation.
Basilio Bona - Dynamic Modelling
59
R(i , θ1 )R(j , θ2 )R(k , θ3 )
Eqn. (2.78)
cθ1 cθ3
−sθ3
sθ2 cθ3
cθ1 cθ2 sθ3 + sθ1 sθ2 cθ1 cθ3 cθ1 sθ2 sθ3 − sθ1 cθ2
sθ1 cθ2 sθ3 − cθ1 sθ2 sθ1 cθ3 sθ1 sθ2 sθ3 + cθ1 cθ2
R(i , θ1 )R(k , θ3 )R(j , θ2 )
sθ1 sθ2 sθ3 + cθ2 cθ3 sθ1 sθ2 cθ3 − cθ2 sθ3 cθ1 sθ2
cθ1 sθ3
cθ1 sθ3
−sθ1
sθ1 cθ2 sθ3 − sθ2 cθ3 sθ1 cθ2 cθ3 + sθ2 sθ3 cθ1 cθ2
R(j , θ2 )R(i , θ1 )R(k , θ3 )
cθ2 cθ3 −cθ1 cθ2 sθ3 + sθ1 sθ2 sθ1 cθ2 sθ3 + cθ1 sθ2
cθ1 cθ3
−sθ1 cθ3
R(j , θ2 )R(k , θ3 )R(i , θ1 ) sθ1
−sθ2 cθ3 cθ1 sθ2 cθ3 + sθ1 cθ2 −sθ1 sθ2 sθ3 + cθ1 cθ2
−sθ1 sθ2 sθ3 + cθ2 cθ3 −cθ1 sθ3 sθ1 cθ2 sθ3 + sθ2 cθ3
cθ1 cθ3 −sθ1 cθ2 cθ3 + sθ2 sθ3
R(k , θ3 )R(i , θ1 )R(j , θ2 ) sθ1 sθ2 cθ3 + cθ2 sθ3
−cθ1 sθ2
sθ1
cθ1 cθ2
R(k , θ3 )R(j , θ2 )R(i , θ1 )
Eqn. (2.76)
Table 2.1: Cardan angles obtained by three elementary rotations around three different angles.
2.12.5
Euler Parameters
Given the rotation described in (2.27) R(u, θ) of an angle θ around an axis repre]T
[
sented by the unit vector u = u1 u2 u3 , we introduce four parameters, called
Euler parameters vi (not to be confused with the Euler angles), defined as:
θ
v1 = u1 sin ,
2
θ
v2 = u2 sin ,
2
θ
v3 = u3 sin ,
2
v4 = cos
θ
2
(2.82)
Only three out of four of these parameters are independent, since the following
constraint holds
4
∑
vi2 = 1
(2.83)
i=1
The Euler parameters may be interpreted as the components of a unit quaternion
u. The quaternions will be introduced in Section 2.12.6.
60
Basilio Bona - Dynamic Modelling
R(i , α)R(j , β)R(i , γ)
cβ
sβ sγ
sβ cγ
sα sβ −sα cβ sγ + cα cγ −sα cβ cγ − cα sγ
−cα sβ cα cβ sγ + sα cγ
cα cβ cγ − sα sγ
cβ
−sβ cγ
sβ sγ
cα sβ cα cβ cγ − sα sγ −cα sβ sγ − sα cγ
sα sβ sα cβ cγ + cα sγ −sα cβ sγ + cα cγ
R(i , α)R(k , β)R(i , γ)
−sα cβ sγ + cα cγ sα sβ sα cβ cγ + cα sγ
sβ sγ
cβ
−sβ cγ
−cα cβ sγ − sα cγ cα sβ cα cβ cγ − sα sγ
R(j , α)R(i , β)R(j , γ)
cα cβ cγ − sα sγ −cα sβ cα cβ sγ + sα cγ
sβ cγ
cβ
sβ sγ
R(j , α)R(k , β)R(j , γ)
−sα cβ cγ − cα sγ sα sβ −sα cβ sγ + cα cγ
R(k , α)R(i , β)R(k , γ)
Eqn. (2.69)
R(k , α)R(j , β)R(k , γ)
Eqn. (2.70)
Table 2.2: Cardan angles obtained by two elementary rotations around three different angles.
Given u, θ and the Euler parameters vi , the rotation matrix R(u, θ) can be computed as:
2
v1 − v22 − v32 + v42
2(v1 v2 − v3 v4 )
2(v1 v3 + v2 v4 )
−v12 + v22 − v32 + v42
2(v2 v3 − v1 v4 ) (2.84)
R(u, θ) = 2(v1 v2 + v3 v4 )
2(v1 v3 − v2 v4 )
2(v2 v3 + v1 v4 )
−v12 − v22 + v32 + v42
Conversely, given R(u, θ), the Euler parameters are computed as:
1√
(1 + r11 + r22 + r33 )
2
1
(r32 − r23 )
v1 =
4v4
1
v2 =
(r13 − r31 )
4v4
1
v3 =
(r21 − r12 )
4v4
v4 = ±
(2.85)
Basilio Bona - Dynamic Modelling
61
The sign ambiguity in v4 can be eliminated constraining the angle as
−
π
θ
π
≤ ≤ ,
2
2
2
or −π ≤ θ ≤ π; in this way v4 can be only positive.
The rotation angle can be computed from
cos θ = v42 − (v12 + v22 + v32 )
and the unit vector u as
v1
1
v2
u=
sin(θ/2)
v3
The Euler parameters can also be computed directly from the Euler angles (ϕ, θ, ψ)
as:
(
)
( )
ϕ−ψ
θ
v1 = sin
sin
2
2
(
)
( )
ϕ−ψ
θ
v2 = cos
sin
2
2
(
)
( )
(2.86)
ϕ+ψ
θ
v3 = sin
cos
2
2
(
)
( )
ϕ+ψ
θ
v4 = cos
cos
2
2
Often the Euler parameters are denoted by the symbol
v1
v2
v =
v3
v4
that is similar to a vector, but it is not, since the application of vector operators has
no sense.
The Euler parameter are a most convenient form for parameterizing the rotations:
they are more compact than the rotation matrix R and more efficient from an
algorithmic point of view, since to compute R = R(v ) from them, as in (2.84), does
not require the use of trigonometric functions.
Moreover, given two rotations R(v a ) and R(v b ), with their relative Euler parameters
v a and v b , one can compute directly the rotation product R(v c ) = R(v a )R(v b )
using the following matrix product:
va4 −va3 va2 va1
va3
va4 −va1 va2
v
(2.87)
v c = F (v a )v b =
−va2 va1
va4 va3 b
−va1 −va2 −va3 va4
62
Basilio Bona - Dynamic Modelling
Only 16 multiplications are required compared to the 27 that are involved in the
product between two 3 × 3 rotation matrices.
2.12.6
Quaternions
Quaternions were introduced by Hamilton who discovered them in 1843, in order
to generalize in three dimensions the complex numbers and their characteristic of
being plane rotators. For an detailed history of the problems and discussion raised
by the quaternions in the scientific community in the middle of XIX century, read
the interesting monograph by Crowe [7].
The quaternion algebra, with its definitions and operators used for representing
rotations, is described in details in Appendix D.
The symbol for the generic quaternion is h.
2.12.7
Quaternions and Rotations
In order to use a quaternion u = (u0 , u1 , u2 u3 ) to represent a rotation, we assign to
each element ui , an Euler parameter vi
u0
u1
u2
u3
= v4
= v1
= v2
= v3
(2.88)
The quaternion so defined is therefore
θ
θ
θ
θ
u = (u0 , u1 , u2 , u3 ) = (cos , u1 sin , u2 sin , u3 sin )
2
2
2
2
and has unit norm. Since a biunivocal correspondence exists between the Euler
parameters and the unit quaternions, any unit quaternion represents a rotation in
the 3D space, as any unit complex number represents a rotation in the 2D plane.
We write R(u) to indicate that for every rotation there is a corresponding a unit
quaternion u and vice versa.
In order to convert a unit quaternion u = (u0 , u v ) into the corresponding matrix
R(u), we use the following relation, that is equal to (2.84), valid for Euler parameters:
R(u) = (u20 − u Tv u v )I + 2u v u Tv − 2u0 S (u v ) =
2
u0 + u21 − u22 − u23 2(u1 u2 − u3 u0 )
2(u1 u2 + u3 u0 ) u20 − u21 + u22 − u23
2(u1 u3 − u2 u0 )
2(u2 u3 + u1 u0 )
2(u1 u3 + u2 u0 )
2(u2 u3 − u1 u0 ) (2.89)
u20 − u21 − u22 + u23
Basilio Bona - Dynamic Modelling
63
Conversely, to compute the quaternion u starting from the elements rij of the rotation matrix R(h)we use a relatione that is equal to (2.85), valid for Euler parameters:
u0 = ±
u1 =
1√
(1 + r11 + r22 + r33 )
2
1
(r32 − r23 )
4u0
(2.90)
1
u2 =
(r13 − r31 )
4u0
u3 =
1
(r21 − r12 )
4u0
When u0 = 0, i.e., θ/2 = π/2 → θ = π = 180◦ , we use a different formula
1√
(1 + r11 + r22 + r33 )
2
√
1
u1 = sgn(r32 − r23 ) (1 + r11 − r22 − r33 )
2
√
1
u2 = sgn(r13 − r31 ) (1 − r11 + r22 − r33 )
2
√
1
u3 = sgn(r21 − r12 ) (1 − r11 − r22 + r33 )
2
u0 =
(2.91)
where sgn(x) is the sign function of x
sgn(x) = +1 for x > 0
sgn(x) = 0 for x = 0
sgn(x) = −1 for x < 0
According to (2.29) – (2.31), elementary rotations R(i , α), R(j , β) e R(k , γ) correspond to the following elementary quaternions:
α
R(i , α) → u1 = (cos ,
2
β
R(j , β) → u2 = (cos ,
2
γ
R(k , γ) → u3 = (cos ,
2
α
sin ,
2
0,
0)
0,
β
sin ,
2
0)
0,
0,
γ
sin )
2
(2.92)
therefore the vectorial base of the quaternions corresponds to the three elementary
rotations by 180◦ angles around the principal axes:
i = (0, 1, 0, 0) → R(i , π)
j = (0, 0, 1, 0) → R(j , π)
k = (0, 0, 0, 1) → R(k , π)
(2.93)
64
Basilio Bona - Dynamic Modelling
Observe that, while the product of two equal elementary quaternions gives
iı = jj = kk = ijk = (−1, 0, 0, 0),
the analog product of two equal elementary rotation matrices gives the identity
matrix, i.e., a rotation of 2kπ:
R(i , π)R(i , π) = R(j , π)R(j , π) = R(k , π)R(k , π) = R(i , π)R(j , π)R(k , π) = I
(2.94)
corresponding to the quaternion (1, 0, 0, 0); this strange property is related to
a new entity, called spinor, that will not be further discussed here; the interested
reader can find more details in [1], [18] and [38, Ch. 11].
The quaternion operations that are related to the computation of rotations are the
following:
1. Given n rotations R1 , R2 , · · · , Rn and the corresponding unit quaternions u1 ,
u2 , · · · , un , the product of rotations
R(u) = R(u1 )Ru2 ) · · · R(un )
corresponds to the quaternion product
u = u1 u2 · · · un
in the same order;
2. given the rotation R(u) and the corresponding unit quaternion u, the transpose
matrix RT corresponds to the conjugate unit quaternion u∗
R(u)
RT (u∗ )
⇔
3. given a generic vector x , that corresponds to a generic quaternion consisting
on the vectorial part only x = (0, x T ) = (0, x1 , x2 , x3 ) and given the rotation
R(u) corresponding to the unit quaternion u, the rotated vector x ′ = R(u)x
coincides with the quaternion product, that has always a zero real part
x ′ = R(u)x
⇔
x′ = uxu∗
4. the product of two or more rotation matrices product R1 (u1 )R2 (u2 ) is computed adopting the following identity:
R1 (u1 )R2 (u2 )x
⇔
u1 (u2 xu∗2 )u∗1 = (u1 u2 )x(u∗2 u∗1 ) = (u1 u2 )x(u1 u2 )∗ .
As a last comment, it should be taken into consideration the fact that in space
applications and aerospace textbooks often the quaternions are organized in a list
theta is different from the one adopted here: namely the real part is the fourth term
of the quaternion, not the first as in our notations.
Basilio Bona - Dynamic Modelling
65
Example 2.12.1
Given the elementary rotation R(j , 90◦ ), find the relative Euler parameters and the
corresponding unit quaternion u
0 0 1
R(j , 90◦ ) = 0 1 0
−1 0 0
Since
applying relations (2.85) and (2.90), we have
u0 = v4
u1 = v1
u2 = v2
u3 = v3
√
2
=
2
= 0√
2
=
2
=0
that are the same as those obtained applying (2.82).
Example 2.12.2
Find the quaternion and the Euler parameters that represent the rotation
R = R1 (i , 90◦ ) R2 (j , 90◦ ) ,
then compute the rotation axis u and the angle θ.
The two quaternions are:
(√ √
)
2 2
R1 (i , 90◦ ) → u1 =
,
, 0, 0
2 2
(√
)
√
2
2
R2 (j , 90◦ ) → u2 =
,0
,0
2
2
from which we obtain the product quaternion
1 1
R1 (i , 90◦ ) R2 (j , 90◦ ) → u1 u2 = − i · j ,
2 2 |{z}
0
1
1
1
i + j + (i × j ) =
2
2
2 | {z }
k
Therefore the Euler parameters are
1
v4 = h0 = ;
2
1
v1 = h 1 = ;
2
1
v2 = h 2 = ;
2
v3 = h 3 =
1
2
(
1 1 1 1
, , ,
2 2 2 2
)
66
Basilio Bona - Dynamic Modelling
( )
[
]T
θ
1
The angle is = arccos
⇒ θ = 120◦ and the axis is u = 1 1 1 ; since u
2
2
√
norm is not unit we compute its norm ∥u∥ = 3 and after that, applying (2.82) we
obtain the same result
√
θ
3
1
1
θ
θ
= √ sin
⇒ sin =
⇒
= 60◦ ⇒ θ = 120◦
2
2
2
2
2
3
2.12.8
Cayley-Klein Parameters
Another parameterizations of rotations was introduced by Felix Klein (1849-1925),
with the aim to make easier the integration of differential equations in complex
gyroscopic problems [16].
This parameterizations, as well as that with quaternions or Euler parameters, has
the advantage of not requiring the computation of trigonometric functions.
The Cayley-Klein Parameters (CK parameters) are represented by complex 2×2
matrices
[
]
α β
Q=
(2.95)
γ δ
{
}
where α β γ δ are complex variables. Q must be unitary, hence the CK
parameters obeys to the following constraints:
α = δ∗
β = −γ ∗
and the matrix Q can be written as
[
α
β
Q=
∗
−β α∗
]
with an additional constraint
αα∗ + ββ ∗ = 1
In Q there are three free parameters and they can be used to characterize the
rotations: indeed from the CK parameters it is possible to compute the rotation
matrix
1 2
j
2
2
2
2
2
2
2
γδ − αβ
2 (α − β − γ + δ ) 2 (−α − β + γ + δ )
R = j (α2 − β 2 + γ 2 − δ 2 ) 1 (α2 + β 2 + γ 2 + δ 2 ) −j(αβ + γ + δ)
(2.96)
2
2
βδ − αγ
j(αγ + βδ)
αδ + βγ
Basilio Bona - Dynamic Modelling
67
√
where j is the imaginary unit, j = −1; the matrix R has real elements, also if it is
function of several complex variables.
Given the Euler angles (ϕ, θ, ψ), the CK parameters are computed as:
( )
θ
j(ϕ+ψ)
α = e
cos
2
( )
θ
β = jej(ϕ−ψ) cos
2
( )
θ
γ = je−j(ϕ−ψ) cos
2
( )
θ
δ = e−j(ϕ+ψ) cos
2
(2.97)
The relation between the CK parameters (α, β), the quaternion (h0 , h1 , h2 , h3 ) or
the Euler parameters (v1 , v2 , v3 , v4 ) is the following:
α = h0 + jh3 = v4 + jv3
β = h2 + jh1 = v2 + jv1
Matrix Q can also be written as:
Q = h0 1 + j (h1 σ 1 + h2 σ 2 + h3 σ 3 )
(2.98)
where 1 is the 2 × 2 identity matrix and σ i are the so called Pauli Spin matrices
[
]
[
]
[
]
[
]
1 0
0 1
0 −j
1 0
1=
σ1 =
σ2 =
σ3 =
.
(2.99)
0 1
1 0
j 0
0 −1
defined by the Pauli algebra
σ j σ k = δjk 1 + jϵjkm σ m
where δjk is the Kronecker delta and ϵjkm are the Levi-Civita symbols, defined in
(2.127).
For further details on the CK parameters one can refer to [16, pages 145-158].
2.12.9
Rotation Vectors – Rodrigues Vectors
Another way to represent the orientation of a rigid body consists in using only three
parameters without incurring in the singularity problems encountered with Euler or
RPY angles.
Instead of using four parameters and a unit norm constraint, like in Euler parameters or in quaternions, one can introduce the so-called rotation vectors r , whose
68
Basilio Bona - Dynamic Modelling
components ri describe the rotation axis, while its norm ∥r ∥ provides the rotation
angle or a trigonometric function of the rotation angle. In general the rotation vector
r is defined as:
r = f (θ) u
(2.100)
where u is the unit norm vector characterizing the rotation axis and ∥r ∥ = f (θ) is
an odd function2 of θ.
The function f (θ) is usually chosen among the following list of odd trigonometric
functions:
a) f (θ) = θ
b) f (θ) = sin θ
c) f (θ) = sin
θ
2
d ) f (θ) = tan
θ
2
Notice that the choice c) is related to quaternions, being the three components of
r equal to the last three quaternion elements, or the first three Euler parameters.
In this case the rotation vector r is called Euler (rotation) vector, not to be
confused with the Euler parameters or the Euler angles.
Choice d ) brings to the so-called Rodrigues (or Gibbs) rotation vectors, quite
used in theoretical kinematics.
The relation between the Rodrigues vector r and the Euler parameters v is the
following:
v1
v2
v3
r1 = , r2 = , r2 =
(2.101)
v4
v4
v4
Notice that the Rodrigues vectors are undefined for odd angles θ = ±(2k + 1)π.
Given two Rodrigues vectors r a and r b , their “product”, denoted by the symbol ⊙,
is computed as:
ra + rb − rb × ra
(2.102)
ra ⊙ rb =
1 − r Ta r b
The relations between rotation matrices and Rodrigues vectors, are established considering that:
1. the product of two rotation matrices Ra Rb is equivalent to the product r a ⊙ r b
of the corresponding Rodrigues vectors;
2. in order to compute R given r , after setting the identities v1 = r1 , v2 =
r2 , v3 = r3 , v4 = 1, one applies relation (2.84) and the elements found are
divided by (1 + r12 + r22 + r32 );
2
An odd function is defined as −f (θ) = f (−θ).
Basilio Bona - Dynamic Modelling
69
3. in order to compute r given R one builds the skew-symmetric matrix S (r ),
given by
0 −r3 r2
T
R−R
0 −r1 =
S (r ) =
= r3
(2.103)
1 + tr (R)
−r2 r1
0
and has immediately the elements ri .
Example 2.12.3
Considering again Example 2.12.1, we want to compute the Rodrigues vectors that
represent the two rotations R1 (i , 90◦ ) and R2 (j , 90◦ ) and then compute the Rodrigues vector of the product R = R1 (i , 90◦ )R2 (j , 90◦ ).
]T
[
The Rodrigues vector relative to R1 (i , 90◦ ) is r 1 = 1 0 0 , while the Rodrigues
[
]T
vector relative to R2 (j , 90◦ ) is r 2 = 0 1 0 ; The overall rotation corresponds to
a Rodrigues vector computed as:
1
R = R1 (i , 90◦ )R2 (j , 90◦ ) ⇒ r = r 1 ⊙ r 2 = 1
1
Since ∥r ∥ =
√
3, we have
√
θ
= arctan 3 = 60◦ ⇒ θ = 120◦ .
2
2.12.10
Orientation Error and Angle-Axis Representation
Often, in satellite or UAV orientation control problems it is necessary to compute
the angular error between two different orientations: when Euler or RPY angles are
used, the error between the desired αd and the measured ones αm is simply defined
by the difference between the respective angles
∆α = αd − αm
or
∆α′ = αm − αd
The first definition ∆α is commonly used by control designers that define as error the difference between the desired and the measured angles, while the second
definition ∆α is used by measurement people that call error the opposite difference.
Instead, when the rotation matrices are used, it is necessary to define the error in
another way since it is a big error to compute the difference between two rotation
matrices!
Let us assume that Rd is the desired rotation matrix and Rm the measured one;
the error may be defined in four different ways:
70
Basilio Bona - Dynamic Modelling
1) Re1 : defined as Rm Re1 = Rd
→
Re1 = RTm Rd .
2) Re2 : defined as Rd Re2 = Rm
→
Re2 = RTd Rm .
3) Re3 : defined as Re3 Rm = Rd
→
Re3 = Rd RTm .
4) Re3 : defined as Re4 Rd = Rm
→
Re4 = Rm RTd .
Notice that Re1 = RTe2 and Re3 = RTe4 .
Relations 1) and 2) define the orientation error as a post-product, and therefore
are to be understood as a perturbation of the rotation with respect to the “mobile”
reference frame, while relations 3) and 4) define the orientation error as a preproduct, and therefore are to be understood as a perturbation of the rotation with
respect to the “fixed” or world reference frame.
In any case the orientation error is the product of two rotation matrices, and in
order to compute the axis unit vector u e and the angle ∆θ it would be necessary to
perform the products and then use the identities (2.43) and (2.46).
Fortunately there exist another formula that one can use to compute the angle nd
the axis of the rotation resulting from the product of rotation matrices, without
actually doing the product. This relation is just used to compute the axis-angle of
the orientation error.
Assuming to have defined the orientation error as Re = RT1 R2 – cases 1) and 2) –
then the following identity holds
u e sin ∆θ =
)
1(
r̄ 2 × r̄ 1 + ḡ 2 × ḡ 1 + b̄ 2 × b̄ 1
2
(2.104)
where r̄ i , ḡ i and b̄ i are the first, second and third rows of Ri , i = 1, 2.
One can notice that the left-hand term in (2.104) is a type b) rotation vector, that
goes to zero for angles equal to 0 or ±π, for which we know that identity (2.46) in
not applicable.
If we define the orientation error as Re = R1 RT2 – cases 3) and 4) – then the
following identity, also known as the unit vector lemma, holds
u sin θ =
1
(r 2 × r 1 + g 2 × g 1 + b 2 × b 1 )
2
(2.105)
where r i , g i and b i are the first, second and third columns of Ri , i = 1, 2.
2.12.11
Conclusions
In this Section we have seen that three parameters αi are sufficient to define the
orientation of a rigid body; the problem with three (angle) parameters is that they
are not singularity-free.
Basilio Bona - Dynamic Modelling
71
If we use the quaternions, the Euler parameters, the Cayley-Klein parameters or
the Rodrigues vectors, it in unclear what are the parameters that take the place
of the αi in (2.65). Using these alternative representations, we cannot say that
the αi are “angles”, but it is necessary to speak in more general terms of “angular
parameters”, whose knowledge nevertheless allows to compute the chosen (Euler or
RPY or Cardan) angles.
For instance, using the quaternions we can define:
θ
θ
θ
α1 = u1 sin , α2 = u2 sin , α3 = u3 sin
2
2
2
(2.106)
and implicitly assume the unit norm. However it is a very common practice to
associate to the αi the Euler or the RPY angles, although in the last few years
quaternion representation has gained much attention, mainly in the aerospace and
computer graphics applications.
2.13
Point Kinematics
Having introduced in the previous Sections the different representations of a geometrical point or of a vector, both polar or axial, in a given reference frame, and having
also characterized the various types of rigid displacements in the Euclidean space, we
are now ready to describe the motion of geometrical points, assumed massless. This
description takes the name of kinematics and is distinct from dynamics since the
former studies the motion of points or rigid bodies establishing the relations among
positions, velocities and accelerations from a pure geometrical point of view, while
the latter studies the influence of the forces and torques on the bodies on these
quantities.
In few words, kinematics study the motion without considering its causes and its
effects, while dynamics studies how the external actions on the given bodies are
related to their motion.
Suppose to have a geometrical point P moving in the 3D Euclidean space with a
time law specified by a function P (t); we can assume a vector representation of P
in a given reference frame
x1P (t)
x P (t) = x2P (t)
x2P (t)
or, to keep notation simple
x1 (t)
x (t) = x2 (t)
x2 (t)
72
Basilio Bona - Dynamic Modelling
Recalling the vector derivative in A.5, we write
d
dt x1 (t)
ẋ
(t)
1
d
d
≡ ẋ (t) = ẋ2 (t) ≡ v (t)
x
(t)
x (t) =
2
dt
dt
ẋ3 (t)
d
x2 (t)
dt
Since the velocity is the limit
−−→
dP (t)
∆P
= lim
∆T →0 ∆T
dt
−−→
the signed segment ∆P can be different in different reference frames.
[−−→]
If the point P is fixed in a local reference frame Rm , we have ∆P
= 0; but if
Rm
[−−→]
Rm moves with respect to a world frame R0 , then ∆P
̸= 0. In the first case
R0
we speak on “local” velocity, in the second case we speak of “global” or absolute
velocity or total velocity. Usually when we do not specify otherwise, we will
consider always the total velocity of a point.
When the vector x (t) is subject to a time-varying rotation R(t)x (t), its derivate is
computed according to the normal derivative product rule, i.e.,
[
]
[
]
d
d
d
[R(t)x (t)] =
R(t) x (t) + R(t)
x (t)
dt
dt
dt
therefore it is necessary to derive the rotation matrix R(t). To understand the
consequences of this operation, we have to study its properties.
2.13.1
Rotation Matrix Derivative and Angular Velocity
To start we assume that the generic rotation matrix R is function of a generic
variable x, that is R = R(x). We recall that the orthogonality of the matrix implies
R(x)RT (x) = I
We derive this relation with respect to a generic variable x obtaining:
dR(x) T
dRT (x)
R (x) + R(x)
=O
(2.107)
dx
dx
It is evident that the first term is the transpose of the second term, therefore,
recalling the definition of skew-symmetric matrix in Appendix B.6, we can define
the following skew-symmetric matrix
def
S (u(x)) =
dR(x) T
R (x),
dx
(2.108)
Basilio Bona - Dynamic Modelling
73
we have introduced a generic vector u(x) because we know that a skew-symmetric
matrix in R3 embeds in its structure the components of a vector. We will later
discuss its precise meaning.
Taking both terms of (2.107) and post-multiplying them by R(x ) we obtain
dR (x)
= S (u (x)) R (x)
dx
(2.109)
and it results that the derivative of an orthonormal matrix is the matrix itself premultiplied by a suitable anti-symmetric matrix.
S (u) in (2.108) is function of a generic vector u(x), itself a function of a generic
scala variable x. In particular, when the rotation matrix R depends on an angle
θ(t) around an axis given by the unit vector u, we can write:
dR (u, θ(t))
def
≡ Ṙ (u, θ(t)) = S (ω(t)) R (u, θ(t))
dt
(2.110)
where ω(t) is the instantaneous total angular velocity vector of the reference frame
represented by the matrix R(t). The angular velocity is represented in the world
reference frame, but we omit to write it as ω 0 for notational simplicity.
Now we take into consideration some simple cases of vector transformation R(t)r (t):
we start with r (t) = r constant in time in a “mobile” reference frame Rm a we
transform it n the world reference frame R0
r 0 (t) = R0m (t)r m
the time derivative is computed as:
0
ṙ 0 (t) = Ṙm (t)r m
(2.111)
the vectors in this expression are represented in two different reference frames, so it
is necessary to represent both in R0 ; considering that
r m = (R0m )T r 0
we have at the end, omitting for notational convenience the dependence of R on t,
0
ṙ 0 (t) = Ṙ1 (R01 )T r 0 (t)
In mechanics textbooks one often encounters the following notation
0
Ω(t) ≡ Ṙ1 (R01 )T
that coincide with our previous skew-symmetric matrix S (ω); indeed
0
Ω = Ṙ1 (R01 )T = S (ω)R01 (R01 )T = S (ω)
(2.112)
74
Basilio Bona - Dynamic Modelling
This matrix is often calle the angular velocity matrix; in some textbooks the
b (t).
skew-symmetric matrix Ω(t) = S (ω(t) is denoted with the symbol ω
Considering again the identity (2.111), we observe that it expresses the well known
formula that gives the linear velocity of a point P fixed in a reference frame that
rotates with an angular velocity ω:
ṙ 0 (t) = Ω(t)r 0 (t) = S (ω(t))r 0 (t) = ω(t) × r 0 (t)
(2.113)
Other interesting properties of the skew-symmetric matrices are related to the rigid
body representation in 3D space. As shown in (2.40), it is possible to compute the
rotation matrix R from the rotation axis represented by the non-unit vector v and
the rotation angle θ = ∥v ∥, considering the skew-symmetric matrix S (v ).
This equality is a theoretical consequence of the following property, in general valid
for Lie groups and algebras (refer to [34] for details):
R(v ) ≡ R(u, θ) = e
S (v )
≡e
S (θ, u)
∞
∑
1 k
=
S (θu)
k!
k=0
(2.114)
that relates the rotation matrix R to the exponential of the skew-symmetric matrix
S (v ) = S (u, θ), function of the unit axis u and angle θ.
Taking the Taylor series of the matrix exponential and considering that the rotations
are elements of a cyclic group, and this reflects on the strusture of S i.e.,
S 3 = −S , S 4 = −S 2
we obtain:
sin θ
1 − cos θ 2
S (v ) +
S (v )
(2.115)
θ
θ2
from which one gets the identities (2.40) and (2.41). Without entering into details,
that can be found in the cited textbook, we write here the fundamental identity that
relates the angular velocity vector ω(t), the unit vector u(t) and the angle θ(t):
R=I +
ω(t) = θ̇(t)u(t) + sin θ(t)u̇(t) + (1 − cos θ(t)) S (u(t)) u̇(t)
(2.116)
From (2.116) we see that the vector ω(t) is not the formal derivative of another
vector, except from the simple case that u is constant, i.e., u(t) = c.
In such a case we have:
ω(t) = θ̇(t)c = ṙ (t)
(2.117)
that represents the total time derivative of the vector r (t) = θ(t)c.
[
]
Another useful formula to get ω(t) from a rotation matrix R = r g b is the
following (see [17]):
1
(2.118)
ω(t) = (r × ṙ + g × ġ + b × ḃ)
2
Notice the similarity of this equality with (2.105).
Basilio Bona - Dynamic Modelling
2.13.2
75
Infinitesimal Rotations
We have seen that, given two rotations respectively represented by two angular pa[
]T
[
]T
rameters α1 = α11 α12 α13 and α2 = α21 α22 α23 , the rotation resulting
from their composition cannot be obtained (except particular cases) from the simple
sum of the two angles:
α ̸= α1 + α2
Now let us consider an infinitesimal rotation defined by the infinitesimal angle
vector
[
]T
dα = dα1 dα2 dα3
the associated rotation matrix can be written as
R(dα) = R(u(t), dθ(t)) = Ru(t),dθ(t)
(2.119)
From (2.115), and taking into account that for dθ → 0 we have
1 − cos (dθ)
→0
(dθ)2
sin (dθ)
→0
(dθ)
the following approximate relation holds
R (dα) ≃ I + S (dα) .
(2.120)
The inverse of R(dα) is computed as
R(dα)−1 = R(dα)T ≃ I − S (dα) = I + S (−dα) ≃ R(−dα)
This relation can be verified writing
R(dα)T R(dα) = (I + S )(I − S ) = I + S − S + S 2 ≃ I
where S 2 (dα) ≃ O since it contains second order infinitesimals, we conclude that
the inverse of R(dα) is R(−dα).
Using (2.120) it is possible to show that dα behaves like a proper vector. For
instance, the commutative property holds; indeed the following identity is true:
R (dα1 ) R (dα2 ) = (I + S (dα1 )) (I + S (dα2 ))
= I + S (dα1 ) + S (dα2 ) + S (dα1 ) S (dα2 )
Since the last term goes to zero, and recalling (B.3), we have
R (dα1 ) R (dα2 ) =
=
=
=
=
I + S (dα1 ) + S (dα2 )
I + S (dα1 + dα2 )
R (dα1 + dα2 )
R (dα2 + dα1 )
R (dα2 ) R (dα1 )
(2.121)
76
Basilio Bona - Dynamic Modelling
We know that from (2.110)) it results
Ṙ(t) = S (ω(t)) R (u, θ(t))
(2.122)
Since R does not depend on the choice of the representation of the parameters α
used to characterize the rotation, the formula (2.122) can be re-written as:
Ṙ (α(t)) = S (ω(t)) R (α(t))
(2.123)
Considering the incremental rate we have
∆R =
≃
=
=
=
R (α + dα) − R (α)
Ṙ(α)dt
S (ω(t)) R (α) dt
S (ω(t)dt) R (α)
S (dα) R (α)
from which it follows
R (α + dα) ≃ R (α) + S (dα) R (α) = (I + S (dα)) R (α) = R (dα) R (α)
(2.124)
We recall that the last term in the above identity does not commute.
We conclude this Section with an observation: the role played by the skew-symmetric
matrix S (ω) is fundamental in the definition of the angular velocity of a reference
frame, and the two relations (2.114) and (2.122) are an example of this role.
Now, if we introduce the following three
0
0 0 0
M2 = 0
M 1 = 0 0 −1
−1
0 1 0
matrices M i :
0 −1 0
0 1
0 0 M 3 = 1 0 0
0 0 0
0 0
(2.125)
thta are commonly called infinitesimal rotation generators), we are able to build
S (ω) as a weighted sum
∑
S (ω) =
ωi M i
i=1,3
and observe that the M i form a basis for S (ω). Moreover the M i have the property
that the differences between their mutual products obey to
M i M j − M j M i ≡ [M i , M j ] = ϵijk M k
(2.126)
where the ϵijk are called permutation symbols or Levi-Civita symbols defined
as
0 i = j, j = k, k = i; two symbols out of three are equal
+1 (i, j, k) ∈ {(1, 2, 3), (2, 3, 1), (3, 1, 2)}
ϵijk =
(2.127)
−1 (i, j, k) ∈ {(1, 3, 2), (2, 1, 3), (3, 2, 1)}
The matrix operator in (2.126) is referred as a commutator or Lie bracket and it
defines the Lie algebra on the orthonormal matrix group. The properties and the
importance of such an algebra will not be detailed here; the interested reader can
find more details in [34].
Basilio Bona - Dynamic Modelling
2.13.3
77
Infinitesimal Rotations and Quaternions
If the rotation angles are small it is possible to directly compute the corresponding quaternions and vice-versa. Let us assume to have a small rotation ∆θ represented
by the (small)
angle parameters ∆α, and the corresponding quaternion
[
]
h = h0 h1 h2 h3 ; from (2.120) we have
1
−∆α3 ∆α2
r11 r12 r13
1
−∆α1 = r21 r22 r23
R(∆α) = I + S (∆α) = ∆α3
−∆α2 ∆α1
1
r31 r32 r33
(2.128)
comparing (2.128) with (2.89), we obtain:
1
∆α1 = (r32 − r23 ) = 2h1 h0 ≃ 2h1
2
1
∆α2 = (r13 − r31 ) = 2h2 h0 ≃ 2h2
2
1
∆α3 = (r21 − r12 ) = 2h3 h0 ≃ 2h3
2
Taking into consideration definition (2.119), the approximation is reasonable; in∆θ
deed, applying (2.114), we obtain h0 = cos
≃ 1 since ∆θ is a small angle.
2
[
]T
Hence, if we know the value of an infinitesimal rotation dα = dα1 dα2 dα3 ,
we can easily compute the corresponding quaternions as
[
]
dα1 dα2 dα3
h≈ 1
2
2
2
2.14
Total Velocity and Acceleration of Points
When we speak of linear or angular velocites of a geometrical point or a rigid body,
we mean the relative velocity of the geometrical point with respect to a well
defined reference frame, or the velocity of the reference frame describing the rigid
body with respect to another well defined reference frame.
To be precise, when we say that a rigid body has at the time t an angular velocity
ω(t), we mean that at t the relation (2.116), that we report below for the sake of
clarity, is true:
ω(t) = θ̇(t)u(t) + sin θ(t)u̇(t) + (1 − cos θ(t)) S (u(t)) u̇(t)
This means that we have to give non only θ̇(t), but also the instantaneous rotation
axis u(t) at time t. If the rotation axis remains constant, then (2.116) reduces to
(2.117).
78
Basilio Bona - Dynamic Modelling
It is important to note that the vector ω(t) cannot be translated parallel to itself
without modifying the physical significance of the described phenomenon, since the
application point of ω(t) gives the position of the axis around which the rotation
takes place; this is not valid for the linear velocity given by the vector v (t): this one
is a free vector, while ω(t) is an applied vector.
We recall that an applied vector is defined by the couple (P, w ), where P is the
−→
geometrical point of application and w is defined such that P Q = w
To be more precise, when we speak of angular (or linear) velocities we should use
the following (cumbersome) notation:
ω kij (P )
(2.129)
where we denote the relative angular velocity of the reference frame (or of the
associated rigid body) Rj with respect to the reference frame Ri , represented in the
reference frame Rk , and where P is the application point of ω; when P is known
or superfluous, we only write ω kij . Usually we implicitly assume to represent the
angular velocity as ω iij (P ).
Whit this notation it is always true that
ω kjj = 0 ∀j, k
(2.130)
since no relative motion will take place, while, in general, it results
ω jij ̸= ω iij
∀i, j
(2.131)
provided that Ri and Rj are non-coincident. Moreover, given the vectorial nature
of the velocity, the additive property holds
ω kim + ω kmj = ω kij
from which we have the following property
ω kij + ω kji = ω kii = 0
⇒
ω kij = −ω kji
(2.132)
that says that, if a reference frame rotates with an angular velocity with respect to
another reference frame, this last rotates with an angular velocity that is the same
in module, but opposite in direction to the previous one.
Now assume that x 1 is the representation of the geometrical point A in R1 and that
this frame roto-translates with respect to R0 ; assume also that R01 (t) and t 01 (t) are
respectively the rotation matrix and the translation vector between the two frames,
and that ω 001 (P ) is the relative angular velocity of R1 with respect to R0 , represented
in R0 . We have still to define the application point P ; it varies according to the
fact that the rotation takes place with respect to the fixed frame R0 axes, or with
respect to the translated local frame R1 axes. In the following we will consider the
two cases.
Basilio Bona - Dynamic Modelling
79
Case A
We consider here a roto-translation described by
T 01 = T (d 01 )T (R01 )
(2.133)
that represents a translation d 01 , followed by a rotation R01 , with instantaneous
rotational velocity ω 001 , performed with respect to the mobile frame (post-mobile
rule).
The motion defined in (2.133) allows the following alternative description: “a rotation followed by a translation performed with respect to the fixed frame (pre-fixed
rule)”.
In this case we can state that the application point P of the applied vector(P, ω) is
the origin of R1 .
In this case the vector r 1 (t) represented in R1 is described in R0 by:
r 0 (t) = R01 (t)r 1 (t) + d 01 (t);
(2.134)
Computing the time derivative of this identity, recalling (2.113) and omitting for
brevity to write the time dependence in the various terms, we have:
0
0
ṙ 0 = Ṙ1 r 1 + R01 ṙ 1 + ḋ 1
0
= S (ω 001 ) R01 r 1 + R01 ṙ 1 + ḋ 1
(
)
0
= ω 001 × R01 r 1 + R01 ṙ 1 + ḋ 1
(2.135)
ρ0 (t) = R01 r 1 (t)
(2.136)
If now we define
we have
0
ṙ 0 (t) = ω 001 (t) × ρ0 (t) + R01 ṙ 1 (t) + ḋ 1 (t)
|
{z
} | {z } | {z }
A
B
(2.137)
C
This is the classical relation that gives the total linear velocity in R0 of a point P
that moves with a linear velocity ṙ 1 (t) in the reference system R1 , itself moving at
0
a linear velocity ḋ 1 (t) and angular velocity ω 001 (t) applied at the origin of R1 .
The three terms are: A) the tangential velocity due to the rotational velocity of the
frame; B) the proper velocity of the point, represented in R0 ; C) the translational
velocity of the frame.
The acceleration r̈ 0 (t) of the point P expressed in R0 can be computed considering
the identity:
(
) (
)
da
db
d (a × b)
=
×b + a ×
dt
dt
dt
80
Basilio Bona - Dynamic Modelling
Taking the time derivative of ṙ 0 (t) in (2.137), using (2.110) and (2.136), and omitting
again to write the time dependence, we obtain:
d
d ( 0 1 ) d 0
r̈ 0 (t) =
(ω 001 (t) × ρ0 (t)) +
R ṙ (t) + ḋ 1 (t)
dt
dt 0 1
dt 0
= ω̇ 001 × ρ0 + ω 001 × ṙ 1 + Ṙ1 ṙ 1 + R01 r̈ 1 + d̈ 1
d ( 0 1)
0
0
= ω̇ 01 × ρ0 + ω 001 ×
R1 r + Ṙ1 ṙ 1 + R01 r̈ 1 + d̈ 1
dt
( 0
)
0
0
0 1
0
0
0
1
= ω̇ 01 × ρ + ω 01 × Ṙ1 r + R1 ṙ + Ṙ1 ṙ 1 + R01 r̈ 1 + d̈ 1
)
(
0
0
R01 r̈ 1) + d̈ 1
= ω̇ 001 × ρ0 + ω 001 × (ω 001 × ρ0 ) + ω 001 × (R01 ṙ 1 ) + Ṙ1 ṙ 1 +
(
= ω̇ 001 × ρ0 + ω 001 × (ω 001 × ρ0 ) + ω 001 × R01 ṙ 1 + ω 001 × R01 ṙ 1
0
+R01 r̈ 1 + d̈ 1
(
)
)
(
0
= ω̇ 001 × ρ0 + ω 001 × ω 001 × ρ0 + 2ω 001 × R01 ṙ 1 + R01 r̈ 1 + d̈ 1
| {z }
| {z }
|
{z
}
|
{z
}
A
B
C
D
(2.138)
where A) is the tangential acceleration; B) is the centripetal acceleration; C) is the
Coriolis acceleration; D) is the sum of the linear acceleration of the point represented
in the fixed frame and the acceleration of the frame (already represented in R0 ).
Case B
We consider here a roto-translation described by
( ) ( )
e 0 (t) = T R0 T d 0
T
1
1
1
(2.139)
that represents a rotation R01 with instantaneous rotational velocity ω 001 , followed
by a translation d 01 performed with respect to the mobile frame (post-mobile rule).
The motion defined in (2.139) allows the following alternative description: “a translation followed by a rotation performed with respect to the fixed frame (pre-fixed
rule)”.
In this case we can state that the application point P of the applied vector(P, ω) is
the origin of R0 .
The point r 1 is described in R0 by:
r 0 (t) = R01 (t)r 1 (t) + R01 (t)d 01 (t);
(2.140)
Taking the time derivative and omitting again to write the time dependence, we
obtain:
0
0
0
ṙ 0 = Ṙ1 r 1 + R01 ṙ 1 + Ṙ1 d 01 + R01 ḋ 1
(
)
0
(2.141)
= S (ω 001 )R01 r 1 + d 01 + R01 ṙ 1 + R01 ḋ 1
0
= ω 001 × (R01 r 1 + R01 d 01 ) + R01 ṙ 1 + R01 ḋ 1
If now we define
ρ0 = R01 r 1 + R01 d 01
(2.142)
Basilio Bona - Dynamic Modelling
81
we have
0
ṙ 0 = ω 001 × ρ0 + R01 ṙ 1 + R01 ḋ 1
0
R01 ḋ 1
that is identical to (2.137), with
instead of
(2.143) we obtain the total acceleration:
0
ḋ 1 .
(2.143)
Taking the time derivative of
r̈ 0 (t) =
)
(
(
)
0
0
ω̇ 01 × ρ0 + ω 001 × ω 001 × ρ0 + 2ω 001 × R01 ṙ 1 + R01 ḋ 1 + R01 r̈ 1 + R01 d̈ 1 (2.144)
| {z } |
{z
}
{z
} |
{z
} |
A
B
D
C
The formula has the A), B), C) and D) terms identical with those in (2.138),
the only difference being the translational velocity and acceleration of the frame R1
expressed in the fixed reference R0 .
In conclusions, the total acceleration of a point that moves in a local reference frame,
that itself moves with respect to a fixed frame, is the sum of the following terms
(time dependency omitted for brevity):
Tangential acceleration
Due to rotational acceleration of the local frame with respect to the fixed frame:
A = ω̇ 001 × ρ0
where ρ0 is the distance of the point P from the origin of the fixed frame.
Centripetal acceleration
Due to the variation of the tangential acceleration, that produce an acceleration
directed toward the instantaneous rotation center:
(
)
B = ω 001 × ω 001 × ρ0
Coriolis acceleration
Due to the linear velocity in a rotating frame:
C = 2ω 001 × v 0
where
v 0 = R01 ṙ 1
0
or v 0 = R01 (ṙ 1 + ḋ 1 )
is the total linear velocity;
Linear acceleration
Due to the linear acceleration of the point P and of the reference frame:
0
a 0 = R01 r̈ 1 + d̈ 1
0
or a 0 = R01 (r̈ 1 + d̈ 1 )
Notice that the symbol ρ0 has a different meaning in the two cases, as put in evidence
by (2.136) and (2.142).