BORf,NG PENGESf,ITf,N STf,TUS TESISO
advertisement

PSZ f9: 16 (Pind. 1r9l)
T]NTVERSITI TEKNOLOGI MALAYSIA
BORf,NG PENGESf,ITf,N STf,TUS TESISO
ENHANCEMENT OF MASTERAI\aDSLAVE VO
JIIDUL:
CONTROLLER MODULES.
SESIPENGAIIAN:
Sava:
2WS2,fr06
MOHD SINA ZAKI BIN MORSIN
G{URUF BESAR)
Mengaku memberurkantesis (PStvl/SejaaelDe*ter4ehafoh)* ini di simpan di Perpustakaan
Universiti Teknologi Malaysia dengansyarat-syaratkegunaanseperti berikut:
l.
2,
3.
4.
Tesis adalahhak milik Universiti Teknologi Malaysia.
PerpustakaanUniveniti Teknologi Malaysia dibenarkanmembuatsalinan unnk tujuan
pengajiansahaja
Perpustakaandibenarkanmembuatsalinantesis ini sebagaibahanpertukaranantarainstitusi
pengajiantinggi.
**Silatandakan(y' )
n
SULIT
t:]
(Mengandungimaklumat yang b€rdadahkeselamatanatau
kepentinganMalaysia sepertiyangtermaktub di dalam AKTA
RAHSIARASMI 1972)
TERHAD
tI
(Mengandungimaklumat TERHAD yang t€leh ditentukan oleh
organisasi/badandi mana penyelidik{randijalankan)
TIDAK TERHAD
Disahkanoleh
(TANDATANGANPEhrrELlA)
AlamatTetap:
NO I.JALAI{ BT'KIT.
BUKIT BATU.8lOzO.
KULAI.
JOHOR DARUL TA'AZIM.
Tariktr
:g-!&L!@6
CATATAN:
.
t'
EN MOHAMAD SI{IJKRI BIN
ZAINAL AEIDIN
(NamaPenyelia)
Tarikh:E MEI2006
Potmgyangtidalcbedccnaan.
Jika tesis ini SULIT atau TERHAD, sila larpirkan surat dari@a pihak
sekali sebabdan t€mpohtesis ini
h*usa/organisasi bertenam dengsnmen1lataker
polu dikelaskmsebagaiSI/LIT atauTERHAD.
Tesis dimaksudkansebageitesis b6gi ljazah Doktor Falsafahdan Sarjanasecara
penyelidikm,ataudisertasibagi p€ngajiansecra kerja lfiusus dm peoyelidikan,atau
I-qoru gojek SarjanaMuda(PSM).
" I herebyc€rtifythqtI haverdthistksis
ad it is suffici€ntandsuitableinermsof
scopcandqualityfor thepurposeof awardinga Bachelor'sDegroein El€ctricat
(Computer)."
Engineering
Sigoanr€
Supcrvisor ; EN MOHAMAD SIilUKRI BIN ZAINAL ABIIXN
Daf,e
: t MAY2lllX
ENHANCEMENT OF MASTER AND SLAVE I/O
CONTROLLER MODULES
MOHD SINA ZAKI BIN MORSIN
This report is submitted for the partial fulfillment of the requirement for achieving
the Bachelor’s Degree in Electrical Engineering (Computer)
Faculty of Electrical Engineering
Universiti Teknologi Malaysia
MAY 2006
u
'I hcr*y dcclarctbd tr€ whob &erdsis tb resultof my ownwort rnd ttc mmrhls
u,hicharcno[fu rc$lts of my onn wslc havcboenclcrly rcknowlodged""
Signrnre:
Au66
: M0tI)
SINA ZAKI BIN MO*llIN
: 0EMAY 2006
iii
Thankful to ALLAH swt,
God Rabbil Alamin, lead the whole world,
Ayah and Mak,
Atuk and Maktuk,
All my siblings, sisters and brothers,
Lectures and teachers,
Friends and relatives,
Not forgotten to some one who gives completely shore up from my support.
iv
ACKNOWLEDGEMENT
Praise to Allah S.W.T the Most Gracious, the Most Merciful, whose blessing
and guidance have helped me through my thesis well. There is no power any strength
save then Allah, the Highest and the Greatest. Peace and blessing of Allah be upon
our Prophet Muhammad S.A.W who has given brightness to mankind.
My parent, Hj Morsin Bin Parman and Hjh Mahani binti Hj Hussain, who
gives me full support in my whole life especially in this project, from materials to
advices to make me strength in intellectual and ethical.
I would like to express my highest appreciation to En Mohammad Shukri bin
Zainal Abidin, my supervisor for his patience and encouragement throughout my
project here at UTM. His guidance and advice have been invaluable throughout the
course of this work. It has been a tremendous wisdom understanding and I am
grateful for it.
I sincere thanks to all my friends and all those whoever has help me either
directly or indirectly in the completion of my final year project and thesis.
Thank you very much and Allah blesses you…..
v
ABSTRACT
The topic of this project is Enhancement of Master and Slave I/O Controller
Modules. This project is enhancement from the previous project, which is ‘Design and
Development of The Embedded Master Controller and Remote I/O Modules’. The main
idea of this project is constructing two levels of micro controllers using PIC
microcontroller. The first level consist of Master Controller and the second level consist
of Slave Controller (Humble).The constraints from previous project are timing in serial
communication; using MAX485, which is collided when transmitting and receiving the
data, where as MAX485 is a half duplex interface. It is because; many slaves will
communicate between the master and the slave modules. This will increase the risk to
collide when the number of the slave is big.
To debug the previous project is very complicated compared to rebuild the new
project. This project started by choosing the ideal components such as micro controllers,
interface, converter using RS485 (MAX490 chips), cables, voltage regulator circuit and
the PCB board. The software development includes the subroutine for keypad, LCD,
USART application (Universal Synchronous Asynchronous Receiver Transmitter) in
serial communications, hardware for USART, EEPROM, input, output and main
program. Some adjustment for this project was implemented in this circuit to make sure
that it can run smoothly. The learning for a new technique to connect the new peripheral
to micro controller, develop some protocol and design the subroutine for the new
peripheral. There are implemented some algorithms to manage the traffic in the data bus.
Overall, this prototype project will enhance and can be implementing in “smart building”.
vi
ABSTRAK
Tajuk bagi projek ini ialah Penambahbaikan Masukan Keluaran Pengawal Utama
dan Pengawal Luaran. Projek ini adalah penambahbaikan yang lepas oleh iaitu
Merekabentuk dan Membangunkan Masukan Keluaran Pengawal Utama dan Pengawal
Luaran Terbenam. Idea utama bagi pojek ini ialah membina dua aras mikropengawal
mengunakan pengawal PIC. Aras pertama berkenaan dengan pengawal utama dan aras
kedua berkenaan dengan pengawal luaran. Kekangan yang pada projek yang lepas ialah
berhubung dengan kaedah pemasaan pada komunikasi sesiri mengunakan MAX485,
dimana berlaku perlanggaran data ketika penghantaran dan penerimaan data dengan
mengunakan MAX485 iaitu pengantaramuka setengah duplek. Ini kerana terdapat
beberapa pengawal luaran akan berkomuikasi dengan pengawal utama dan risiko
berlakunya perlanggaran data akan berlaku apabila jumlah pengawal luaran semakin
besar.
Bagi memperbaiki projek yang lepas adalah lebih sukar berbanding membina
semula projek yang baru. Projek bermula dengan merekabentuk perkakasan, termasuklah
pemilihan komponen, mikropengawal, antaramuka mikropengawal dengan perkakasan,
membina aras penhantaran data mengunakan MAX 490, merekabentuk talian
penghantaran data, litar pengawal atur voltan dan papan PCB. Fasa kedua pula berkaitan
dengan pembangunan perisian. Bahagian ini termasuk merekabentuk subrutin untuk
papan kekunci, LCD, komunikasi serial mengunakan USART, peralatan untuk USART,
EEPROM, masukan / keluaran dan program utama. Terdapat sedikit pengubahsuaian
pada rekabentuk projek pada litar bagi memastikan ia dapat berfungsi dengan baik.
Proses membelajaran teknik baru dilakukan untuk menghubungkan peralatan baru kepada
mikro pengawal dan membangunkan sedikit protokol untuk peralatan tersebut.
Pengunaan algorithma yang sesuai digunakan dalam pengurusan trafik pada bas data.
Secara keseluruhannya projek ini boleh dinaiktaraf dan diimplimentasikan pada “smart
building”.
vii
TABLE OF CONTENTS
CHAPTER
1
2
TITLE
PAGE
TITLE PAGE
i
DECLARATION
ii
DEDICATION
iii
ACKNOWLEDGEMENT
iv
ABSTRACT
v
ABSTRAK
vi
TABLE OF CONTENTS
vii
LIST OF FIGURES
x
LIST OF TABLES
xiii
LIST OF ABBREVIATIONS
xiv
LIST OF APPENDICES
xv
INTRODUCTION
1.1
Background Project
1
1.2
Project Overview
2
1.3
Project Objective
3
1.4
Scope of Work
4
1.5
Thesis Layout
5
LITERATURE REVIEWS
2.1
Introduction
6
2.2
Communications Implementing
7
viii
2.2.1
2.3
3
Micro Controllers.
9
2.3.1
Microchip PIC18F452 Microcontroller
9
2.3.2
Microchip PIC 16F877A Microcontroller
10
MAX 490 Chips.
15
2.5
LCD
16
2.6
Keypad
17
2.7
ULN 2003
18
2.8
Eagle software
19
2.9
Daisy Chaining
20
DESIGN ARCHITECTURE
3.1
Master Controller
22
3.2
Slaves Controller
25
3.2.1
Slave A
26
3.2.2
Slave B
27
Communications
29
HARDWARE DESIGN
4.1
Controllers Circuit
31
4.2
Circuit for Master Controller
34
4.3
Circuit for Slave Controller A
36
4.4
Circuit for Slave Controller B
38
4.5
Home Modeling
40
4.5.1
40
4.6
5
7
2.4
3.3
4
Serial Data Transmission.
Relay Circuit.
Cable Design
42
SOFTWARE AND PROGRAMMING
5.1
Microcode Studio Plus Software
44
5.2
Programming Flow Chart
45
5.2.1
Master programming
46
ix
6
7
5.2.2
Scanning Keypad
57
5.2.3
Slave A programming
60
5.2.4
Slave B programming
64
EXPERIMENTS AND RESULTS
6.0
System Setup.
71
6.1
Experiment 1
72
6.2
Experiment II.
74
6.3
Experiment III
75
6.4
Experiment IV
77
CONCLUSION
7.1
Problem Encountered
80
7.1.1 Solve the problem in RS485 Half
Duplex.
7.1.2
80
Complexity programming in
Master Controller
82
7.2
Future Work
82
7.3
Conclusion
83
REFERENCES
84
APPENDIXES
85
x
LIST OF FIGURES
FIGURE
TITLE
PAGE
1.1.
Last year PSM by LEE HENG SENG
2
2.1
Pin Configurations
10
2.2
Pin Configurations
11
2.3
MAX-490
16
2.4
LCD
17
2.5
Keypad
18
2.6
Eagle Layout GUI
19
2.7
New Slide Project
20
2.8:
Overview of the project
21
3.1
Keypad
22
4.1
Oscillator circuit
32
4.2
Voltage regulator circuit
32
4.3
Reset circuit
33
4.4
LED circuit (Active High)
33
4.5
Master Controller circuit
25
4.6
Slave Controller A circuit
37
4.7:
Slave Controller B circuit
39
4.8
Relay Circuit
41
4.9
Fan
42
4.10
Alarm System
42
4.11
Lamp
42
4.12:
Magnetic Door
42
5.1
Micro Code Studio GUI
45
5.2
Master main programming
47
5.3
Master main programming (PART2)
48
5.4
Master main programming (PART3)
49
xi
5.5
Master main programming (PART4)
50
5.6
Master main programming (PART5)
51
5.7
Master main programming (PART6)
52
5.8
Master main programming (PART7)
53
5.9
Master main programming (PART8)
54
5.10
Master main programming (PART9)
55
5.11
Master main programming (PART10)
56
5.12
Master main programming (PART11)
57
5.13
Scanning Keypad
58
5.14
Serial Communication in master controller
59
5.15
Slave A main programming
61
5.16
Slave A main programming (PART 2)
62
5.17
Slave A main programming (PART 3)
63
5.18
Slave A main programming (PART 4)
64
5.19
Slave B main programming
65
5.20
Slave B main programming (PART2)
66
5.21
Slave B main programming (PART3)
67
5.22
Slave B main programming (PART4)
68
5.23
Slave B main programming (PART5)
69
5.24
Slave B main programming (PART6
70
6.1
Beginning output
71
6.2
Slave A (before)
72
6.3
Slave A (after)
73
6.4
Slave B (before)
73
6.5
Slave B (open door is pressed)
74
6.6
Slave B (Press lock door)
74
6.7
First Result (A)
75
6.8
First Result (B)
75
6.9a
Slave A (before)
76
6.9b
Slave A (after)
76
xii
6.10a
Slave B (before)
76
6.10b
Slave B (‘*’ button is pressed)
77
6.10c
Slave B; and (‘#’ button is pressed)
77
6.11
The state the corresponding door is breached
78
6.12
The state the corresponding door is breached
78
6.13
This LED shows the door is breached at door 4 slaves
78
6.14
Master try to control before the breached door still open
79
6.15
Final result, the door that was breached is closed and the Master
79
turn off the alarm system
7.1
MAX 485
81
7.2
MAX 490
81
xiii
LIST OF TABLES
TABLE
TITLE
PAGE
3.1
Port A for Master Controller
23
3.2
Port B for Master Controller
24
3.3
Port C for Master Controller
24
3.4
Port D for Master Controller
25
3.5
Port E for Master Controller
25
36
Port A for Slave Controller A
26
3.7
Port B for Slave Controller A
26
3.8
Port C for Slave Controller A
26
3.9
Port D for Slave Controller A
27
3.10
Port E for Slave Controller A
27
3.11
Port A for Slave Controller B
27
3.12
Port B for Slave Controller B
28
3.13
Port C for Slave Controller B
28
3.14
Port D for Slave Controller B
28
3.15
Port E for Slave Controller B
29
4.1
Component and Description for Master Controller
36
4.2
Component and Description for Slave Controller A
38
4.3
Component and Description for Slave Controller B
40
xiv
LIST OF ABBREVIATIONS
LCD
-
Liquid Crystal Display
GUI
-
General User Interface
RAM
-
Random Access Memory
ROM
-
Read only memory
MHz
-
Mega Hertz
LED
-
Light Emitting Diode
USART
-
Universal Synchronous Asynchronous Receiver Transmitter
PCB
-
Printed Circuit Board
xiv
LIST OF ABBREVIATIONS
LCD
-
Liquid Crystal Display
GUI
-
General User Interface
RAM
-
Random Access Memory
ROM
-
Read only memory
MHz
-
Mega Hertz
LED
-
Light Emitting Diode
USART
-
Universal Synchronous Asynchronous Receiver Transmitter
PCB
-
Printed Circuit Board
1
CHAPTER 1
INTRODUCTION
1.1 Background Project
Smart buildings in this 21st Century will integrate the current control
technology with other building systems to create a "Smart Building". The Smart
Building will anticipate the needs of the building users to provide improved comfort,
greater user control, and better energy efficiency.
Here are a few examples of how this can work; microcontroller based control
of building systems: Building occupants can adjust room temperature set points,
change lighting schemes, and security system. However, this project tries to use
master and slaves function to be implemented as controller for the smart building.
The specific function was controlled in every slave controllers and the master
controller is used to monitor and make the system efficient.
2
1.2 Project Overview
MASTER CONTROLLER
DATA BUS
SLAVE
CONTROLLER
#A
#B
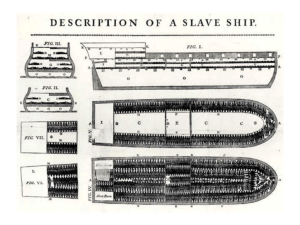
Figure 1.1: Last year PSM by LEE HENG SENG.
Figure 1.1 above shows the previous project. The title of this project is
“Development of Master and Slave controller Modules”. From this project, there are
some problems that are founded.
The main problem is the quality of the communication. It is because; the
communicator was limited to one way communication at the same time using a half
3
duplex communications. The system is familiar to handshaking process where the
slave will not send the data when the master is using data bus. This problem will
become critical when the numbers of slave increases and the usage of data bus at the
same time.
Overall, this project is to find out solution of this problem, minimizing the
errors when the transferring data, especially involves in a long distance
communication and to make it user-friendly.
1.3 Project Objective
The main objective of this project is to enchantment, build and develop of
Master and Slave I/O Controller Modules which are:
•
To improve the communication process between master controller and slave
modules.
•
To make sure that the master controller can control and monitor the input and
output from the slave microcontrollers.
•
To make sure all the addition of the new peripheral can be run on the system.
•
To enhance the system from the past PSM project by LEE HENG SENG
(2004/2005) especially in the communication problem.
For the ending of the project is to make sure that the error and problem in the
last year project will be done. The some addition of the new peripharal can be
implement and run smoothly.
4
1.4 Scope of Work
Basicly, this project involves in software and hardware development. For the
entire system, PIC microcontroller is used as the controllers. This project are divided
into two phase. The first phase of this project is to understand how to control and
coding the PIC microcontrollers which act as the controller and brain of this project.
This is the crucial part of this project where the desired input and output, controlling
the slave and operation depend on how is really understand the microcontroller.
The second phase of this project is focused on developing the interface
between the Master controller and Slave controllers. The network set up is using RS485 full duplex to connect communication between master to slave controller and
vice versa. This will be done by hardware connection using microcontroller as a
main component, MAX490 transceiver. All the modeling will be adapted to the
pattern of on/off light and fan, sensor and alarm system.
MASTER
CONTROLLER
RS-485
(MAX490)
SLAVE
CONTRLLER
DATA BUS
As a slave controller unit, some simple input and output will de available to
receive command from the master controller, perform its job assigned by master
controller and arrangement basis by critical job first. Master will perform to monitor
and control the entire job at the Slaves part that we need. This means that some data
can be sent to master controller and the data will be show in the LCD on the master
controller and will control using the keypad.
5
1.5 Thesis Layout
Chapter 1 explains the background study, project objectives, scope of work
and overview for this project. Chapter 2 explains the literature reviews on some of
important sources, communication implementing and explanation of devices that was
used in this project and chapter 3 describes the design architectures of project,
project methodology and network topology used in project.
Chapter 4 presents the hardware design for programmer, master controller,
slaves’ controllers and cable design. Chapter 5 is the main focus which explained the
software and programming in developing the embedded controller. Chapter 6 showed
the result that was funded and the last chapter, chapter 7 is the conclusion of the
project and recommendations for future works.
6
CHAPTER 2
LITERATURE REVIEWS
2.1
Introduction
In recent years, there are a lot of microprocessor generation that can be found
in the market such as microcontroller; single-chip programmable possessor.
Nowadays, it is very familiar and will be found in all kind of equipment – microwave
ovens, washing machines, hand phones, digital cameras and many more.
Microcontrollers
are
developed
from
microprocessors.
However,
microcontroller is diverse from microprocessor in many ways. First and foremost is
the functionality. In order for a microprocessor to be used, other components such as
memory, or components for receiving and sending data must be added into it. On the
other hand, microcontroller is designed to be all in one. No other external
components required for its application because all the necessary peripherals are
already built into it. Thus, saves. cost and space needed to construct devices.
7
There are various types of microcontroller namely ATMEL, MOTOROLA or
INTEL can be used. However, the PIC microcontroller has been chosen as the
controller due to familiarity, availability, and cost of this microcontroller. There are
two types of PIC microcontrollers that are used in this project. For Master controller,
PIC18F452 is selected and for Slave controller using 16F877A.
2.2
Communications Implementing
There is various type of serial network today. However, the project is selected
the RS-485 using MAX490 link to connected between the controllers. This network
has several protocols and formatting that must be followed to ensure that every
transmission reaches its destination and each node can understand the messages that
want send to it.
2.2.1
Serial Data Transmission.
There are two types of data transmissions: asynchronous transmission and
synchronous transmission. In asynchronous transmission, clock line are not used
because each line of the link is provides its own clock and each agree on the clock’s
frequency. However, to make sure the communication is successful; every node that
was communicated must match within a few percent.
In serial data transmission the data is transmitted in serial format with the
LSB of the byte to be transmitted, shifted out first among the data bits. The general
format for serial transmission is Start Bit + Data Bits + Parity Bit (Optional) + Stop
Bit. The Parity bit is becomes optional. It is used for error checking in
communication. Once the start bit has been sent, the transmitter sends the actual data
8
bits. There may be 5, 6, 7, 8, or 9 data bits, depending on the number have selected.
Both receiver and the transmitter must agree on the number of data bits, as well as
the baud rate. Almost all devices transmit data using either eight or nine data bits.
This project is implementing eight bits data transmission. However, software
implementing addresses bytes for a slave to make sure the master controller well
known that the specific slave that user want to control or monitor.
Communication
Good network are the main idea to make this project successful. In this
project, it will be divided into two parts of network, internal and external
communications. Internal communication is between micro controller and peripheral
while the other one is communication between Master controller and Slave
controller.
•
Internal communication
This internal communication is communication in the same level. To make
sure that the communication is efficient, so the data and the peripheral are controlling
by the internal microcontroller. For master controller, it connected to keypad and
LCD that are used to control and monitor the slave part. In the slave part, it
connected to input and output which is lamp, fan, sensor alarm and etc.
•
External communication
External communication is communication between master and slave
controller. If there have request at slave controller to master controller, it must be
signal to the master and the master will appear the job on LCD. When the
communication is finished, the slave sends back a signal to the master reporting that
the task had been done.
9
2.3
Micro Controllers.
2.3.1
Microchip PIC18F452 Microcontroller
Microcontroller is a highly integrated chip which includes, on a single chip,
all or most of the parts needed for a controller. The microcontroller could be called a
“one-chip solution”. It requires very little external support hardware. It typically
includes:
•
CPU (Central Processing Unit)
•
RAM (Random Access Memory)
•
EPROM/PROM/ROM (Erasable Programmable Read Only Memory)
•
I/O (input/output) – serial and parallel
•
Timers
•
Interrupt controller
Microcontroller is a key of any embedded control applications. Suitable or
best fit criteria in microcontroller must be chosen in order to achieve the objectives.
The PIC 18F452 microcontroller used in this project is a low-power, high
performance 16-bit RISC CPU with 10 bit Analog-to-Digital Converter module. The
device is manufactured using Microchip’s high-density nonvolatile memory
technology, compatible with the PIC 16 and PIC17 instruction sets. By combining an
enhanced 16-bit CPU with high speed FLASH/EEPROM technology on a monolithic
chip, the Microchip PIC 18F452 is a powerful computer which provides a highly
flexible and cost effective solution to many embedded control applications.
Microchip PIC is quit robust; it can 1,000,000 erase/write cycles Data
EEPROM memory typical. Besides that, the data will retain more that 40 years. It
just using 5 volt power supply, but can work in range 2.0-5.5 volt.
10
Figure 2.1
Pin Configurations PIC18F452
PIC 18F452 provides the following standard features: 32K bytes of Flash
memory, 256 bytes of RAM, 34 I/O lines, four 8/16 timer/counter, addressable
USART module which supports RS-490, 8 input channels of Analog to Digital
Module.
Figure 2.1 shows the interface peripheral available in Microchip PIC 18F452
microcontroller. Basically internal interface has an input-output peripheral which is
used to interface with other devices such as LED, LCD, keypad and switches.
2.3.2
Microchip PIC 16F877A Microcontroller
Slave’s circuit provided to use PIC 16F877A, there are some of there using
for external support hardware:
•
CPU (Central Processing Unit)
•
RAM (Random Access Memory)
11
•
EPROM/PROM/ROM (Erasable Programmable Read Only Memory)
•
I/O (input/output) – serial and parallel
•
Timers
•
Interrupt controller
Microcontroller PIC 16F877A is the most popular and usually use for design.
The PIC 16F877A microcontroller used in this project is a low-power, high
performance 8-bit RISC CPU. 8K Flash program memory is quit enough to medium
scale design. The Microchip PIC 16F877A is a quit powerful computer which
provides a highly flexible designing and cost effective solution too many of
embedded control applications.
Figure 2.2
Pin Configurations PIC 16F877A
PIC 16F877A provides the following standard features: 8K bytes of Flash
memory, 256 bytes of RAM, 33 I/O lines, four 8/16 timer/counter, addressable
UART module which supports RS-490 network, 8 input channels of Analog to
Digital Module.
12
Figure 2.2 shows the interface peripheral available in Microchip PIC
16F877A microcontroller. Basically internal interface has an input-output peripheral
which is used to interface with other devices such as LED and switches.
Port Structure
All five ports in the PIC 16F877A are bidirectional. Some pins of the I/O
ports are multiplexed with an alternate function from the peripheral features on the
device. In general, when a peripheral is enabled, that pin may not be used as a
general purpose I/O pin.
Each port has three registers for its operation. These registers are:
•
TRIS register (data direction register)
•
PORT register (reads the levels on the pins of the device)
•
LAT register (output latch)
The data latch (LAT register) is useful for read-modify write operations on
the value that the I/O pins are driving.
PORTA is a 6-bit wide, bi-directional port. The corresponding Data Direction
register is TRISA. Setting a TRISA bit (= 1) will make the corresponding PORTA
pin an input (i.e., put the corresponding output driver in a Hi-Impedance mode).
Clearing a TRISA bit (= 0) will make the corresponding PORTA pin an output (i.e.,
put the contents of the output latch on the selected pin).
PORTB is an 8-bit wide, bi-directional port. The corresponding Data
Direction register is TRISB. Setting a TRISB bit (= 1) will make the corresponding
PORTB pin an input (i.e., put the corresponding output driver in a Hi-Impedance
13
mode). Clearing a TRISB bit (= 0) will make the corresponding PORTB pin an
output (i.e., put the contents of the output latch on the selected pin).
PORTC is an 8-bit wide, bi-directional port. The corresponding Data
Direction register is TRISC. Setting a TRISC bit (= 1) will make the corresponding
PORTC pin an input (i.e., put the corresponding output driver in a Hi-Impedance
mode). Clearing a TRISC bit (= 0) will make the corresponding PORTC pin an
output (i.e., put the contents of the output latch on the selected pin).
PORTD is an 8-bit wide, bi-directional port. The corresponding Data
Direction register is TRISD. Setting a TRISD bit (= 1) will make the corresponding
PORTD pin an input (i.e., put the corresponding output driver in a Hi-Impedance
mode). Clearing a TRISD bit (= 0) will make the corresponding PORTD pin an
output (i.e., put the contents of the output latch on the selected pin).
PORTE is a 3-bit wide, bi-directional port. The corresponding Data Direction
register is TRISE. Setting a TRISE bit (= 1) will make the corresponding PORTE pin
an input (i.e., put the corresponding output driver in a Hi-Impedance mode). Clearing
a TRISE bit (= 0) will make the corresponding PORTE pin an output (i.e., put the
contents of the output latch on the selected pin).
USART (Universal Synchronous Asynchronous Receiver/Transmitter)
Many PIC microcontroller devices have a built-in USART and it is one of the
most commonly used serial interface peripherals. It is also known as the Serial
Communications Interface, or SCI.
14
USART stands for Universal Synchronous Asynchronous Receiver
Transmitter and its main function is to transmit or receive serial data. For implement
USART, microcontroller must be able to generate accurate clock pulse for its own
time cycles. For easy implementation, most microcontrollers today used the crystal
as an oscillator.
In this mode, the USART uses standard non-return-to zero (NRZ) format
(one START bit, eight or nine data bits and one STOP bit). The most common data
format is 8-bits. An on-chip dedicated 8-bit baud rate generator can be used to derive
standard baud rate frequencies from the oscillator. The UART transmits and receives
the LSB (less significant bit) first. The USART’s transmitter and receiver are
functionally independent, but use the same data format and baud rate.
USART can go up to more 115200 bps if higher oscillator are implement, but
its will make program become more and more difficult. USART are half duplex
communication. There are having 2 hardware pins will needed by this 16F877A, that
one pin to transmit and one pin to receive
To implement USART software; the code drives a pin low, waiting for a bit
time then drives the pin low or high depending on bit zeros of the character to be
transmit. Waiting the bit time and repeating this process until finish all eight bit are
output followed by outputting a high for one bit period allows generation of RS490,
the process is easily to allow parity or extra stop bits to be output.
The timing is very important in USART implementation. USART can be
implementing in full duplex to, but its must using task switching method.
As mentioned before, the USART can transmit and receive data serially. It
can transfer a frame of data with eight or nine data bits per transmission and detect
15
errors when data is overwritten or incorrectly framed. It can generate interrupts when
a reception occurs (or a transmission completes) and it contains data buffers that
simplify the timing requirements of the software controlling the USART.
In order to configure pins RC6/TX/CK and RC7/RX/DT as the Universal
Synchronous Asynchronous Receiver Transmitter:
• Bit SPEN (RCSTA<7>) must be set (= 1),
• Bit TRISC<6> must be cleared (= 0), and
• Bit TRISC<7> must be set (=1).
2.4
MAX 490 Chips.
This standard for RS 485 using MAX490 chip provide 4 wire full duplex and 2
wires in both receiver and transmission. Full duplex serial communication use 0 to 5
volt differential signals. The correct input and output voltage is around 4.5 to 5.5
volt for “mark 1” and -0.5 to 0.5 volt for ‘mark 0”. Voltage supply (VCC) for this
chip is 12 Volt. The bit rate for transmission is up to 2.5 Mbps per transmitting. In
the data bus, the logic 1 is represented in 12 volt and logic 0 is represented in -12
volt.
This chip can be use in using two half duplex. There are two enable pins
available for the transceiver to be using in receive mode or transmit mode. Driver
output, receiver input, driver input, transmitting output voltage (A, B, Z and Y)
provided -8V to +12.5V to work. Control input voltage (DI) provide 0.5V to (VCC +
0.5V) and receiver output voltage (RO) provide -0.5V to (VCC +0.5V).
16
Figure 2.3: MAX-490
2.5
LCD
Recently, a number of projects using intelligence liquid crystal display (LCD)
have increased. Their ability to display not just numbers but also letters, words, and
all manner of symbols make them a good deal more versatile than 7- segment (LED
display).
In this project, the type of LCD display that was used is The HD44780U. The
HD44780U is a dot-matrix liquid crystal display controller and the driver LSI
displays alphanumeric, Japanese kana characters, and symbols. It can be configured
to drive a dot-matrix liquid crystal display under the control of a 4- or 8-bit
microprocessor. Since all the functions, such as displaying RAM, character
generator, and liquid crystal driver, required for driving a dot-matrix liquid crystal
display are internally provided on one chip, a minimal system can be interfaced with
this controller/driver.
17
A single HD44780U can display up to one 8-character line or two 8-character
lines. The HD44780U has a pin function compatibility with the HD44780S which
allows the user to easily replace an LCD-II with an HD44780U. The HD44780U
character generator ROM is extended to generate 208 5 × 8 dot character fonts and
32 5 × 10 dot character fonts for a total of 240 different character fonts. The low
power supply (2.7V to 5.5V) of the HD44780U is suitable for any portable batterydriven product requiring low power dissipation.
Figure 2.4: LCD
2.6
Keypad
To make a Master controller control the external controllers (slave controllers),
a keypad was chosen to make it user-friendly. There are various types of them in the
market. The keypad that is discussed here is the 4x4 keypad type. The keypad is a
simple type comprising of sixteen buttons.
The figure2.5 below shows the keypad that was used in this project. However,
the keypad also can be built personally using sixteen normally closed switches. The
18
keypad will be directly connected to the microcontroller because it is made by
sixteen switches internal and build in resistors. The active low or active high are
dependent on the design in the circuit. For other alternatives, a keypad encoder can
reduce the complexity of software programming using assembly language. One of
the encoder for 4 x 4 keypad is IDE1144 keypad encoder IC.
Figure 2.5: Keypad
2.7
ULN 2003
ULN 2003 is used for relay circuit in house model system. The Relay
transistor chip provides seven relay circuits into a single chip. ULN 2003 has seven
NPN Darlington connected transistors. The relay allows high current application that
is used as a switch.
The chip provides easy connection to the microcontroller. There are various
combinations (poles and throws), various activation voltage (5V, 6V, 9V, 12V, 24V),
and various switching capacity. The chip can be applied on a logic circuit (without
19
microcontroller, manual controller box). In this project, it’s used to control the alarm
and motor direction, but not speed.
2.8
Eagle software
To design the PCB board for this project, Eagle Layout software editor is
chosen. The figure 2.6 above shows the GUI form the Eagle software. It is simple
software because the design is directed to the board (printed circuit). Design for the
actual circuit will be done but it is optional. The new project is created with go to
<File> option, select <New> and select <Board>.the figure 2.7 will be showing the
GUI for a new project slide.
Figure 2.6: Eagle Layout GUI
20
Figure 2.7: New Slide Project
2.9
Daisy Chaining
Software skill implemented in this project comes out from the idea of Daisy
Chaining. Daisy Chaining is the algorithm for arrangements to the slave to manage
the traffic in data bus when/if two or more slaves request to master controller at the
same time. It is based on polling algorithm and depends on speed, critical function,
and size of data.
There are two types of application of the Daisy Chaining, which is;
1) Hardware connecting
2) Software implementation
21
Hardware connecting is implemented if there is crucial traffic in the system but it
can increase the cost. This project implements software only and the critical level of
communications.
MASTER CONTROLLER
LCD
Daisy Chaining
Keypad
DATA BUS
#2
#1
SLAVE
CONTROLLER
INPUT &
OUTPUT
INPUT &
OUTPUT
RS232
RS485
Figure 2.8:
Overview of the project
The arrangement is that the slave controller chooses the first slave(#1) because
it has the critical job, highest speed, and smallest size of data, it is followed by the
second controller (#2) which is the less critical job, lower speed, and larger size of
data. This will cause a starvation on data bus, when two or more slave want to
request at the same time and the critical job will not be done in real time. Finally, the
system will be not efficient.
When the master controller receives a request, it will check the slave controller
(#1) first, and if the first slave has work, the job must be settled. Master controller
will send the enable signal to slave and link and data to/ from the Master controller
until the work has been done. It is followed by the second slave and the process will
continue indefinitely.
22
CHAPTER 3
DESIGN ARCHITECTURE
3.1 Master Controller
This project is based on communication between micro controllers. It is
constructed in two levels consisting the master level and slave level. There are one
master and two slaves. The number of slaves is linear to the number of jobs that the
master wants to monitor. In this project, the number of slaves that were designed is
up to four slaves.
1
2
3
A
4
5
6
B
7
8
9
C
*
0
#
D
Figure 3.1 Keypad
23
In the Master controller unit, one LCD and one keypad are attached to it. The
LCD is used to monitor the slaves and the keypad is used to select the specific slave
and control the specific port.
The Alphanumeric numberings is designed to select the type of slaves. When
the button ‘A’ is pressed, it considers that Slave A is selected to be monitored, When
button ‘B’ is pressed, it considers Slave B is selected, and the other button ‘C’ and ‘D’
is not used (spared for new addition of slaves).
The numbers ‘1’ to ‘9’ are used to select a specific port in a specific slave. The
‘*” button design is to control a variety of functions such as on/off light, fan, and
open/close door. The ‘#’ switch is designed to lock or unlock the door only.
PORT Design For Master Controller
PORT A
Table 3.1: Port A for Master Controller
Bit 0
Bit 2 and 3
Switch to stop the Alarm
Bit controller for LCD.
24
Bit 3 and 5
To show there has been communication
between Master and Slave. In the initial
state, the LED is always on. If the bit 3 is
blinking, there has been communication
between Master and Slave C. It is same if
there have blinking in bit 5, it is showing
you that there are communications
between Master and Slave D. However,
slave C and D are spared for any new
additions, so the LEDs are always on.
PORT B
Table 3.2: Port B for Master Controller
Bit 0 to 7
Keypad Scanning
PORT C
Table 3.3: Port C for Master Controller
Bit 1 to 4
Alarm LED; this LED will show you that
the alarm status is on or off.
Bit 6 and 7
Designed for communications. Bit 6 is for
transmit data using
USART and another 1 for receiving data
for USART
25
PORT D
Table 3.4: Port D for Master Controller
Bit 0 to 7
LCD data port.
PORT E
Table 3.5: Port E for Master Controller
Bit 0 and 1
To show that they have been
communications between Master and
Slave. In the initial state, the LED is
always on. If the bit 0 is blinking, there
have been communications between
Master and Slave A. It is same if there
have blinking in bit 1, its shows that there
are communications between master and
slave B.
3.2 Slaves Controller
Every slave is designed to control a specific function or job. This project is
designed in two number of slaves only, Slave A and B. There are some of input output
modules available for the slaves controller to control its activities
For slave’s
controller unit, the microcontroller is designed to revive and transmit command from
or to master controller using serial communication RS 485 full duplex (MAX 490).
26
3.2.1
Slave A
Slave A as a controller to control the lamp and fan. The slave A is designed to
control 4 lamps another 4 fans.
PORT Design For Slave Controller A
PORT A
Table 3.6: Port A for Slave Controller A
Bit 0 to 7
Not used
PORT B
Port B uses LEDs for representing lamps and fans.
Table 3.7: Port B for Slave Controller A
Bit 0 to 3
Lamp 1 to lamp 4.
Bit 4 to 7
Fan 1 to fan 4.
PORT C
Table 3.8: Port C for Slave Controller A
Bit 5
For LED to show the system in slave A is
ready and is supplied by power
Bit 6 and 7
Designed for communications. Bit 6 is
designed to transmit data using USART
and another 1 for receiving data for
USART.
27
PORT D
Port D is designed for switch circuit. The entire bit is corresponding to lamps
and fans for Port B.
Table 3.9: Port D for Slave Controller A
Bit 0 to 3
Lamp 1 to lamp 4.
Bit 4 to 7
Fan 1 to fan 4.
PORT E
Table 3.10: Port E for Slave Controller A
Bit 0 to 7
3.2.2
Not used
Slave B
Slaves B is to control the security system. 4 pins are designed to represent an
open or closed door. Another 4 pins are designed to lock the corresponding door. For
this application, the system has designed another 4 pins to represent that the door is
opened or brake opened.
PORT Design For Slave B
PORT A
Table 3.11: Port A for Slave Controller B
Bit 0 to 3
Supply power (Vdd) for pin 11 (Vdd) in
PIC controller. It is because; the pin 11 in
28
PCB is difficult to achieve Vdd point. The
selected 4 pin is to make sure it will
stabilize the power supply and the 4 pin
must always be on (logic 1).
PORT B
LED to represent whether the door is close, open, lock and unlock.
Table 3.12: Port B for Slave Controller B
Bit 0 to 3
Shows the door is open or close
Bit 4 to 7
Shows the door is lock or unlock.
PORT C
Table 3.13: Port C for Slave Controller B
Bit 0 to 3
Represent the alarm in corresponding door.
If bit 0 is on, its shows the door 1 is brake
open, if bit 1 is on, its shows the door 2 is
brake open and so on.
Bit 6 and 7
Designed for communications. Bit 6 is
design to transmit data using USART and
another 1 for receiving data for USART.
PORT D
Table 3.14: Port D for Slave Controller B
Bit 0 to 7
Designed as a switch with corresponding
PORT B. Bit 0 is switch LED for PORT
B.0, Bit 1 is switch LED for PORT B.1, and
29
so on.
PORT E
Table 3.15: Port E for Slave Controller B
Not used.
3.3 Communications
The communication phase is divided into two categories. It consists of master
to slave and internal communication in every controller.
In master to slaves’ communication, the master will send the address of the
slaves that is selected to communicate. For communicating to Slave A, master will
send character “A”, and the slave must receive the data and send back their address to
master showing it is ready for start the communication. For the Daisy Chaining
algorithm, Slave A is selected to be first slave because of simpler instruction, higher
speed, and smaller data sizing. Because of larger instruction and data sizing at the
Slave B, it selected to be a second slave to reduce delay for the whole system.
The data that will be sent is in “logic 0”. So, when the slaves receive “logic 0”,
it shows that there are instructions from master to slaves.
The second phase is the communication from slave to master. There are some
differences between master to slave communication. Firstly, it must wait for its turn
30
which was selected from the master. Secondly, the instructions will be sent in “logic
1’ that’s designed to differentiate between the 2 ways communications.
In serial data transmission the data is transmitted in serial format with the LSB
of the byte to be transmitted, shifted out first among the data bits. The eight bit is
selected to provide one byte of data that want to deliver. Communication between
master and slave A is in two byte of data. Firstly both must send it address to master,
for example “A” character for slave A. The second byte is the data information that
will execute. For communications between slave B, there is designed to send three
byte of data. Firstly is there address, second byte for controlling the main input output
and the last one is for the alarm routine.
For this project, there have not been any communications between the slaves.
It will show that the master have the biggest “voice” in this system implementation.
32
CHAPTER 4
HARDWARE DESIGN
4.1 Controllers Circuit
The main component in the circuit is the microcontroller. There are two
types of controllers used to construct the circuit, that is PIC 18F452 for Master
controller and PIC 16F877A for slaves controller.
To build the microcontroller circuit, there are three important parts that must
be alerted. First is about the oscillator circuit, reset circuit, and power supply circuit
(Vdd and ground). For master controller, the selected oscillator is 10 MHz, and the
other oscillator for the two slaves’ controller is the same, 10 MHz to generate clock
pulse for microcontrollers.
The same oscillator frequency between Master and Salves oscillator is to
make the system run clearly because of the rate for transmission and receiving the
data
must
be
same
at
least
for
a
few
second.
32
Figure 4.1: Oscillator circuit (C1 and C2 is 22pF)
For power supply circuit, voltage regulator is used to reduce and stabilize the
power to suit the function. Input for power supply is acceptable in range 12 – 15 volt.
For PIC microcontroller, it is working in 4.5 - 5 Volt power supply. The voltage
regulator used is 78L05 to reduce 12 Volt to 5 Volt. However, there is also another 2
voltage regulator in Master Controller board. First one (78L05) is used for LCD
power supply and the other one (78L12) is to generate 12 Volt for serial
communication. The separated voltage regulators are to make sure it will reduce the
heat from voltage regulator. The capacitor in voltage regulator circuit is to stabilize
the power when the power is oscillate. For this circuit 10uF capacitor is selected.
Figure 4.2: Voltage regulator circuit (C1 and C2 is 10uF)
There are many types and functions of switch. In this project, the normally
open (NO) switch is used. The switches are used as a reset button switch, open/off
33
lamp and etc. The entire switch is build together with a 10k Ohm resistor to limit the
current flow to the microcontroller.
MLCR pin
(Microcontroller)
Figure 4.3: Reset circuit
For LCD circuit, it uses one adjustable resistor to adjust the contrast of LCD.
Another component that must be added is diode IN4007. This component is used to
make sure that there is no current flow in the wrong way into the circuit when the
power supply is wrongly connected. The design is optional because the function is to
protect the component especially the microcontroller.
Figure 4.4: LED circuit (Active High)
34
The function of MAX490 is to convert TTL signal to RS485 format or viceversa and one connector provides to be link up each other.
4.2 Circuit for Master Controller
Figure below shows the circuit for master controller.
35
keypad
Figure 4.5: Master Controller circuit
LCD
36
Table 4.1: Component and Description for Master Controller
Part
R1-R7
Description
Resistance is used for a switch normally open
and reset circuit.
C1-C11
R1, R2
=10kΩ
R3 (Rheostat)
=10kΩ
R4 –R7
=10kΩ
To be use in voltage regulator circuit, MCLR
circuit, and oscillator circuit.
Q1
LED
C1 - C2
= 0.1uF
C3 – C4
= 22pF
C5 – C11
= 10uF
Crystal oscillator = 10MHz
LED1- LED 8
=5mm
LED9 (power LED)
=5mm
IC1
Microchip 16F877A
IC2
MAX 490
IC3, IC4
Voltage Regulator 78L05
IC5
Voltage Regulator 7812
S1, S2
Switch Normally Open.
LCD
Keypad
HD44780U
EDE1144
4.3 Circuit for Slave Controller A
Figure below shows the circuit for slave controller A.
37
Figure 4.6: Slave Controller A circuit
38
Table 4.2: Component and Description for Slave Controller A
Part
R1-R9
Description
Resistance is use for a switch normally open
and reset circuit.
R1
R2 – R9
C1-C5
To be use in voltage regulator circuit, MCLR
circuit, and oscillator circuit.
C1
C2 – C3
C4 – C5
Q2
= 330Ω
= 10kΩ
= 0.1uF
= 22PF
= 10uF
Crystal oscillator = 10MHz
LED
LED1- LED 8
LED9 (power LED)
IC1
MAX 490
IC2
Microchip 16F877A
IC3
Voltage Regulator 78L05
S1- S9
=5mm
=5mm
Switch Normally Open.
4.4 Circuit for Slave Controller B
Figure below shows the circuit for slave controller B.
39
Figure 4.7: Slave Controller B circuit
Figure 4.7: Slave Controller B circuit
40
Table 4.3: Component and Description for Slave Controller B
Part
R1-R13
Description
Resistance is used for a switch normally open
and reset circuit.
R1 –R4
R5
R6 –R13
C1-C5
To be used in voltage regulator circuit,
MCLR circuit, and oscillator circuit.
C1
C2 – C3
C4 – C5
Q1
= 0.1uF
= 22pF
= 10uF
Crystal oscillator = 10MHz
LED
LED1- LED 12
LED13 (power LED)
IC3
MAX 490
IC2
Voltage Regulator 78L05
IC1
Microchip 16F877A
S1- S9
S10
4.5 House Model
4.5.1
=1kΩ
= 100Ω
=100Ω
Relay Circuit
Switch Normally Open.
Switch ON/ OFF 4 input
=5mm
=5mm
41
Relay works as a switch and can be used for a different stage of power. The
high power can’t be connected directly to the microcontroller because it will damage
the system when it is connected. Relay have two states which are normally open or
normally closed. In this project, single pole double throw relay was used for
designing the relay circuit.
To test the circuit, two storey home models is used for the system. In the
design; it used two circuits for relay function, firstly to represent the fan, and another
one is to represent the alarm. The fan used 12 volt and higher current than controller
circuit. So it cannot connect directly to the microcontroller because the
microcontroller only uses around 25 mA of current. The difference between the
current and voltage will damage the microcontroller.
Another relay circuit is used for alarm system. Alarm system needs quite a
smaller current flow, but higher voltage than microcontrollers. The alarm used nine
Volts direct current. The figure 4.7 below shows the relay circuit for house model.
EXTERNAL
RELAY
ULN 2003
Figure 4.8: Relay Circuit
The relay circuit include ULN 2003 chip. It acts like a relay circuit but
developed using transistors into a single chip. One ULN 2003 can control up to 7
relay circuits (one transistor can control one relay circuit). It provides simple
42
interface to the input/output. For this system, it was developed in two level with the
first level consist the connection between microcontroller to ULN2003 chip, and the
second level consist ULN 2003 to external relay (Fan relay and Alarm relay).
Figure 4.9: Fan
Figure 4.11: Lamp
Figure 4.10: Alarm System
Figure 4.12: Magnetic Door Sensor
4.6 Cable Design.
For this project, there is one type of device built to setup the RS485 network.
The device is used to make sure that the length of communication is expandable. The
43
devices will perform up to 4000 feet in length. This prototype project used ribbon
wire but in a real project the recommended wire is twisted pair wire because of their
cost, reliability and length. The cable is twisted 2-12 twist per feet to reduce the
damage in transmitting. The cable is usually known used as telephone wire.
The frequency rate is compatible to send the data and voice. It provides
100Hz to 5 MHz of data frequency. So, it is quite enough to be implemented in this
circuit that sends the simple data and instruction.
CHAPTER 5
SOFTWARE AND PROGRAMMING
5.1
Microcode Studio Plus Software.
Two common languages are used to program the PIC microcontroller which
is the assembly language and the compiler language. Nowadays, there are many
compiler language are available to make programming easier, reduce the complexity
and faster development compared to assembler programming language and it was
practical in industry. However, there are disadvantages when using compiler
languages, which is it use larger memory and not suitable for real time functioning.
But, it can be adjusted or edited because some of the compiler will creates .asm file
and the editing will be there.
In this project, all the functions are written using Microcode Studio Plus
compiler. The main function is communication and it’s not critical for real time. This
compiler use basic language and it gives to some of the library that we can use for
some function that was already there. Microcode Studio Plus was created specifically
for Microchip PIC codes only. The file will be saved in .pbp file. After the coding
was
45
compiled, it can create many files and the main file is .hex (machine codes) and .asm
file (lower level languages).
Figure 5.1: Micro Code Studio GUI
5.2 Programming Flow Chart.
In this project, Compiler Microcode Studio Plus is used in microcontroller
programming. This Flow chart will explain in specifically that the microcontroller
working. There are some of the routine that the master and slave are used like This
project was implements keypad and LCD, so it have to own routine to scanning the
keypad and showing the output in LCD.
46
5.2.1
Master programming
Master programming will start with initialize the port which the input, output,
baud rate, define buffer space for receive and transmit data, define bit, setting
function and delay time for LCD.
All the output input will be testing to make sure all the output will be
function. Main function will be start with scan the keypad using keypad routine and
the result of scanning will be used to select the specific slave, port and job. Besides
that, all the information will be saved to declare memory and will be send using
serial communication routine. Below will show the master controller programming
flow chart;
47
Figure 5.2: Master main programming
48
Yes
No
Yes
No
Yes
No
Yes
No
Yes
No
Yes
No
Yes
No
Figure 5.3: Master main programming (PART2)
49
Yes
No
Yes
No
Yes
No
Yes
No
Yes
No
Yes
No
Yes
No
Figure 5.4: Master main programming (PART3)
50
C
Yes
If SLAVE = “A”
No
If SLAVE = “B”
Yes
CALL SELB
No
Yes
If SLAVE = “C”
CALL SELC
No
Yes
If SLAVE = “D”
CALL SELD
CALL SELA
Figure 5.5: Master main programming (PART4)
51
Yes
No
Yes
No
Yes
No
Yes
No
Yes
No
Yes
No
Yes
No
Figure 5.6: Master main programming (PART5)
52
Yes
No
Figure 5.7: Master main programming (PART6)
SELA is a same with another 3 which is SELB, SELC, and SELD in the flow
chart. But the different between SELA, SELB, SELC, and SELD is the memory,
MDATA. If MDATA1 is used for SELA, MDATA2 is provided for SELB and so on.
53
Yes
No
Yes
No
Yes
No
Yes
No
Figure 5.8: Master main programming (PART7)
54
SELAD
Clear LCD
Check PORT bit
and Data
Receiving
If PORT = (n) && Data
Receiving.(n-1) = 1
Yes
Display
LAMP(n) = ON
No
If PORT = (n) && Data
Receiving.(n-1) = 0
Yes
Display
LAMP1(n) = OFF
No
If PORT = (p) && Data
Receiving.(p-1) = 1
Yes
Display
FAN(p) = ON
No
If PORT = (p) && Data
Receiving.(p-1) = 0
Yes
Display
FAN(p) = OFF
No
Goto
DISPLAYEND
Figure 5.9: Master main programming (PART8)
The figure above show the flow chart to control the input from port A. the character
n is representing the no 0 to 3 and the character p is to representing no 4 to 7.
55
Yes
No
Yes
No
Yes
No
Figure 5.10: Master main programming (PART9)
Figure above show the flow chart for control the input from port A. The
character ‘n’ represent the no 0 to 3.
56
No
Yes
No
Yes
Figure 5.11: Master main programming (PART10)
57
Yes
No
Figure 5.12: Master main programming (PART11)
5.2.2
Scanning Keypad
The figure below shows the keypad scanning. In that flow chart, it shows the
scanning for alphanumeric number in keypad. To make it scan the keypad, it must
send “logic 1” to the X-axis and scan the Y-axis. The Y-axis is 0 (input low), it
showed the button was pressed.
58
Yes
No
Yes
No
Yes
No
Yes
No
Figure 5.13: Scanning Keypad
59
Yes
No
Yes
No
Yes
No
Yes
No
Figure 5.14: Serial Communication in master controller
60
5.2.3
Slave A programming
Slave A programming will start with initializing the port which the input,
output, baud rate, define buffer space for receive and transmit the data. Port B is set
to be clear to make it default.
All the output will test to make sure all the output will be function. Main
function will be start with routine serial communication to check whether have any
instruction from master and send the new scenario in Slave controller A.
Figure 5.15 below will show the Slave A controller programming flow chart;
61
Figure 5.15: Slave A main programming
62
Yes
No
Yes
No
Yes
No
Yes
No
Figure 5.16: Slave A main programming (PART 2)
63
Second Test
Testing All Bits in
PORT B
Yes
If bit = 0 &&
PORTD = 0
Bit = 1
No
If bit = 0 &&
PORTD = 1
Yes
Bit = 0
No
Yes
If bit = 1 &&
PORTD = 0
Bit = 0
No
Yes
If bit = 1 &&
PORTD = 1
Bit = 1
No
J
Figure 5.17: Slave A main programming (PART 3)
64
Yes
No
Figure 5.18: Slave A main programming (PART 4)
5.2.4
Slave B Programming
Slave B programming will start with initialize the port which the input,
output, baud rate, define buffer space for receive and transmit the data. Port B is set
to be clear to make it default.
All the output will be testing to make sure all the output will be function.
Main function will be start with routine serial communication to check whether it has
any instruction from master and send the new situation in Slave controller B.
Figure 5.19 below shows the Slave B controller programming flow chart;
65
START
Initialize PORT
Clear PORTB
Testing all
Output
PORTA = 255
PORTD = 255
PORTB = 0
ALARMR = 0
ALARM = 0
M
L
PORTC = 0
Test1
Figure 5.19: Slave B main programming
66
Yes
No
Yes
No
Yes
No
Yes
No
Yes
No
Figure 5.20: Slave B main programming (PART2)
67
Yes
No
Yes
No
Yes
No
Yes
No
Yes
No
Figure 5.21: Slave B main programming (PART3)
68
CLEARBIT
Yes
PORTD = 255
ALARMTEST
No
Figure 5.22: Slave B main programming (PART4)
69
ALARMTEST
Yes
If PORTB.4 = 1 &&
PORTA.0 = 1
ALARM.0 = 1
No
If PORTB.5 = 1 &&
PORTA.1 = 1
Yes
ALARM.1 = 1
No
Yes
If PORTB.6 = 1 &&
PORTA.2 = 1
ALARM.2 = 1
No
Yes
If PORTB.8 = 1 &&
PORTA.3 = 1
ALARM.3 = 1
No
Yes
If ALARM = 0
L
No
ALARM_OUT
Figure 5.23: Slave B main programming (PART5)
70
No
Yes
Figure 5.24: Slave B main programming (PART6)
72
CHAPTER 6
EXPERIMENTS AND RESULTS
6.1 System Setup
When 12 to 15 volt is supplied to the Master Controller board, all the outputs
for both the master and slave ports such as the LED, lamp, fan and alarm will be
activated for a short period of time then will deactivate automatically. The reason it
was designed that way is to initialize and make sure that every port is functioning.
For the Slave Controllers, the power is supplied through the cable from master
controller circuit. In the design, the baud rate is set to 9600 Mbps for the serial
communication.
At the beginning, when the power is turned on, the LCD will show the output
in figure 6.1.
Figure 6.1: Beginning output
72
This chapter will explain on some of the experiment that was conducted to
show the function for the system. The result will be shown in the experiment result.
6.2 Experiment 1
The objective for experiment one is to test the function for every slave
controller unit. The procedure is
1) Pressing any switch button between fans or lamps in Slave A
2) Pressing any switch button for input between open /close door and lock for
Slave B.
3) Observe the result.
Experiment result
:
The result for slave A, figure 6.2 shows the scenario of slave A before any
switch is pressed. The figure 6.3 will show the result when switch for lamp one is
pressed.
Figure 6.2: Slave A (before)
73
Figure 6.3: Slave A (after)
The result for slave B, figure 6.4 shows the scenario of slave B before any
switch is pressed. The figure 6.5 will show the result when switch for open door is
pressed. The result shows that door four is opened. Figure 6.6 shows the result when
switch for lock door is pressed
Figure 6.4: Slave B (before)
74
Figure 6.5: Slave B (open door is pressed)
Figure 6.6: Slave B (Press lock door)
6.3 Experiment II.
The objective for this experiment is to show the master will monitor the
output of the Slave Modules. The procedures are,
1) Using alphanumeric keypad button in the master controller, select the
slaves that needs to be monitored.
2) The specific port using button number in the keypad is selected.
75
Experiment result
:
Figure 6.7 shows the scenario of slave A when slave A is selected and the
figure 6.8 will shows the result when slave B is selected.
Figure 6.7: First Result (A)
Figure 6.8: First Result (B)
6.4 Experiment III.
The objective for this experiment is to show that the master can control the
output of the slave modules. The procedures are,
1) Alphanumeric keypad button in the Master controller is used; the
slave that needs to be controlled is selected.
2) The specific port using button number in keypad is selected.
76
3) ‘*’ button, control to on\of the lamp in the slave A is used, and open\close
the door for slave B.
4) “#’ button in keypad is used to locked or unlock the door.
Experiment result
:
Figure 6.9a and 6.9b shows the scenario of slave A when slave A, port one
and ‘*’ button is pressed. Figure 6.10a, 6.10b and 6.10c shows the result when slave
B is selected, ‘*” button and ‘#” button are pressed.
Figure 6.9 a: Slave A (before)
Figure 6.9 b: Slave A (after)
Figure 6.10a: Slave B (before)
77
Figure 6.10b: Slave B (‘*’ button is pressed)
Figure 6.10c: Slave B; and (‘#’ button is pressed)
6.5 Experiment IV
The objective for this experiment is to show that the master will monitor and
control the alarm security system. The procedures are;
1) Alphanumeric keypad button in the Master controller is used; the
slave that needs to be controlled is selected.
2) The specific port is selected using the button number on the keypad.
3) Button‘*’ is used to control on/of the lamp in slave A, and open/close the
door in slave B.
4) Button “#’ is used on keypad; control whether to lock or unlock the door.
5) When the door is closed and locked, try to breach the corresponding door.
6) Before closing the breached door, try to turn off the alarm.
7) Close the door, and try to turn off the alarm system.
Experiment result
:
78
Figure 6.11 shows the situation when door four is closed. Figure 6.12 will
show the result in LCD when the door is breached.
Figure 6.11: The state showing the corresponding door before being breached
Figure 6.12: The state showing the corresponding door is breached
Figure 6.13: This LED shows the door is breached at door four, slave B
79
Figure 6.14: Master trying to turn off the alarm while the door is still open after
being breached.
Figure 6.15: Final result, the door that was breached is closed and the Master turns
off the alarm system.
CHAPTER 7
CONCLUSION
7.1 Problem Encountered
7.1.1
Solve the problem in RS485 Half Duplex
The previous project used the MAX 485 which is a half duplex transceiver. The
design will be more complex if the number of slave increases.
Half duplex communication is fixed to a one way transmission at one time. If
there transmission and receiving are happening at the same time, the data will collapse,
and the system will shut down and the circuit will be reset. So the system will start from
the initialized state. If there are a big amount of slaves in the system, only a single slave
will send the request at one time. The master will communicate with the slave and the
other slaves must wait for request. The problem is how to reduce the execution time and
how the master will manage the slaves as some of the slaves will control certain critical
jobs in the system? Figure below shows the circuit of the MAX485.
81
Figure 7.1: MAX 485
The problem in two way communication would be settled by using a full
duplex communicator. MAX 490 separates the data bus into two lines; first for
receiving the data and the other one is to transmit the data. At the same time, the
amount of connections will increase too. Figure 7.2 shows the internal circuit of the
MAX490 chip.
Figure 7.2: MAX 490
7.1.2
Complexity programming in Master Controller
82
Nowadays, there are many types of compiler that are developed to reduce the
complexity of coding in assembly language. Many companies and industrial sectors
today use the compiler to build their system. Simply because, they want to reduce
construction time.
If there is a critical job that must done in real time, the adjusting will done at
the .asm file that will be created. The result is same, but execution time is reduced.
7.2
Future Work
This is just a prototype project and there are a lot of additions that can be
made to maximize the number of task monitored by the Master Controller. In
conclusion, four slaves will be used, that means two addition slaves will be added
into the system. So the enhancements and addition of a new slave into the next
project is done just by linking up to the system that has been done. So it’s will save
cost, and also time.
Other recommendation is to use a remote control, where the system can be
controlled from a distance. Besides that, this addition would make the system more
user-friendly and compatible.
This project is recommended to be implemented in medium size Smart
buildings. The length will be up to 4000 feet using MAX 490 transmissions. The
technique in MAX490 provides the error checking in transmission line. So the error
will be minimized and the data is very accurate between the maximum lengths.
83
7.3
Conclusion
There are various types of microcontrollers in the market like Atmel,
Motorola and many more. The Microchip microcontroller is recommended to be
used because it is cheaper and provide user up to 100,000 time’s more rewriteable
flash memory. The other microcontroller is much better than Microchip in providing
fast controllers and high accuracy. Atmel is generally used in Military systems as
real time, speed and accuracy is needed.
The RS-485 network is a powerful transmission method because it has a fast
rate transmission and a large range (4000 feet). All the data can be received and
transmitted in short time. The architecture of the circuit provides error checking
technique. One of the data will be sent and the other will inverted. The receiving end
also has an inverter to invert the received data back to the original data. So, it
minimizes error especially in the long distance communication where invalid data
will be ignored.
REFERENCES
1. www.microchip.com.
2. 123 PIC® Microcontroller Experiments for the Evil Genius, Myke Predko,
McGraw- Hill, 2005.
3. Thesis PSM, Design and Development of Embedded Master Controller and
Remote I/O Modules, LEE HENG SENG 2004/2005.
4. Chris@greenengineer.com/ /Contents of this site are ©1999 Christopher R.
Schaffner/
5. www.coggan.com
6. RS-422 and RS-485 Application Note. USA: B&B Electronics International
Ltd.
7. SPACE Microcontroller PIC UTM 2005_Day1[1] & Day2[2]
8. Microchip PIC 16F877A Datasheet & application notes
9. Selecting and Using RS-232, RS-422, and RS-485 Serial Data Standards Maxim-Dallas.htm
10. Serial Data Transmission by The Ganssle Group
11. MAX 485 & MAX 490 Data sheet and Application.
85
APPENDICES
86
APPENDIX A
Printed Circuit Board of Master Controller
87
APPENDIX B
Printed Circuit Board of Slave Controller A
88
APPENDIX C
Printed Circuit Board of Slave Controller B
89
APPENDIX D
Source Codes for Master Controller
DEFINE OSC 40
MDATAT3 VAR BYTE
Define HSER_BAUD 9600
‘Variable transmit data from slave C
DEFINE HSER_RCSTA 90h
MDATAR4 VAR BYTE
DEFINE HSER_TXSTA 20h
‘Variable for receive data slave D
DEFINE CHAR_PACING 10
MDATAT4 VAR BYTE
‘Variable transmit data from slave D
' Set LCD Data port
MPC1 VAR BYTE
DEFINE LCD_DREG PORTD
MPC2 VAR BYTE
' Set starting Data bit (0 or 4) if 4-bit bus
MPC3 VAR BYTE
DEFINE LCD_DBIT 0
MPC4 VAR BYTE
' Set LCD Register Select port
BUTTONPRESS VAR BYTE
DEFINE LCD_RSREG PORTA
SLAVE VAR BYTE
' Set LCD Register Select bit
SEL VAR BYTE
DEFINE LCD_RSBIT 2
SWITCH VAR BYTE
' Set LCD Enable port
ALARM VAR BYTE
DEFINE LCD_EREG PORTA
‘Variable alarm status
' Set LCD Enable bit
ALARM2 VAR BYTE
DEFINE LCD_EBIT 1
‘Variable alarm status slave B
' Set LCD bus size (4 or 8 bits)
ALARM4 VAR BYTE
DEFINE LCD_BITS 8
‘Variable alarm status port D
' Set number of lines on LCD
ALARMCUT VAR BYTE
DEFINE LCD_LINES 2
‘Variable data alarm cut
' Set command delay time in us
CUTCOUNT VAR BYTE
DEFINE LCD_COMMANDUS 2000
' Set data delay time in us
TRISA = %00000001
DEFINE LCD_DATAUS 100
TRISC = %10000000
TRISD = 0
ADCON1 = 7
TRISE = 0
DATA0 VAR BYTE
TRISB = 15
'(0~3)=INPUT
MDATAR1 VAR BYTE
‘Variable for receive data slave A
PORTA = 0
MDATAT1 VAR BYTE
PORTB = 0
‘Variable transmit data from slave A
PORTD = 0
MDATAR2 VAR BYTE
PORTC = 0
‘Variable for receive data slave B
PORTE = 0
MDATAT2 VAR BYTE
MDATAT1 = 255
‘Variable transmit data from slave B
MDATAR1 = 255
MDATAR3 VAR BYTE
MDATAT2 = 255
‘Variable for receive data slave C
MDATAR2 = 255
(4~7)=OUTPUT
90
MDATAT3 = 255
'#################################################
MDATAR3 = 255
###
MDATAT4 = 255
START:
MDATAR4 = 255
PORTA = 0
MPC1 = 255
BUTTONPRESS = 255
MPC2 = 255
SWITCH = 255
MPC3 = 255
ALARM = 0
MPC4 = 255
ALARM2 = 0
SLAVE = "A"
ALARM4 = 0
ALARMCUT = 0
'#################### KEYPAD
PORTE.0 = 1
######################
PAUSE 500
BUTTONTEST:
PORTE = 0
PORTB = 16
PORTE.1 = 1
IF PORTB.0 = 1 THEN PRESSD
PAUSE 500
IF PORTB.1 = 1 THEN PRESSC
PORTE = 0
IF PORTB.2 = 1 THEN PRESSB
PORTA.3 = 1
IF PORTB.3 = 1 THEN PRESSA
PAUSE 500
PORTA = 0
PORTB = 32
PORTA.5 = 1
IF PORTB.0 = 1 THEN PRESSH
PAUSE 500
IF PORTB.1 = 1 THEN PRESS9
PORTA = 0
IF PORTB.2 = 1 THEN PRESS6
PORTC.0 = 1
IF PORTB.3 = 1 THEN PRESS3
PAUSE 500
PORTC = 0
PORTB = 64
PORTC.1 = 1
IF PORTB.0 = 1 THEN PRESS0
PAUSE 500
IF PORTB.1 = 1 THEN PRESS8
PORTC = 0
IF PORTB.2 = 1 THEN PRESS5
PORTC.2 = 1
IF PORTB.3 = 1 THEN PRESS2
PAUSE 500
PORTC = 0
PORTB = 128
PORTC.3 = 1
IF PORTB.0 = 1 THEN PRESSS
PAUSE 500
IF PORTB.1 = 1 THEN PRESS7
IF PORTB.2 = 1 THEN PRESS4
PORTA = 0
IF PORTB.3 = 1 THEN PRESS1
PORTB = 0
PORTD = 0
GOTO KEYPADEND
PORTC = 0
PORTE = 0
PRESS1:
BUTTONPRESS = 1
GOTO KEYPADEND128
'#################################################
PRESS2:
###
BUTTONPRESS = 2
'#################################################
GOTO KEYPADEND64
###
PRESS3:
BUTTONPRESS = 3
91
GOTO KEYPADEND32
ENDIF
PRESS4:
BUTTONPRESS = 4
KEYPADEND32:
GOTO KEYPADEND128
IF PORTB = 32 THEN
PRESS5:
BUTTONPRESS = 5
GOTO KEYPADEND64
PRESS6:
GOTO KEYPADEND
ELSE
GOTO KEYPADEND32
ENDIF
BUTTONPRESS = 6
GOTO KEYPADEND32
KEYPADEND64:
PRESS7:
IF PORTB = 64 THEN
BUTTONPRESS = 7
GOTO KEYPADEND128
PRESS8:
BUTTONPRESS = 8
GOTO KEYPADEND
ELSE
GOTO KEYPADEND64
ENDIF
GOTO KEYPADEND64
PRESS9:
KEYPADEND128:
BUTTONPRESS = 9
IF PORTB = 128 THEN
GOTO KEYPADEND32
PRESS0:
BUTTONPRESS = 0
GOTO KEYPADEND64
GOTO KEYPADEND
ELSE
GOTO KEYPADEND128
ENDIF
PRESSS:
BUTTONPRESS = "S"
KEYPADEND:
GOTO KEYPADEND128
'#################################################
PRESSH:
###
BUTTONPRESS = "H"
'############### SERIAL COM. SLAVE A
GOTO KEYPADEND32
################
'#################################################
PRESSA:
###
BUTTONPRESS = "A"
SERIALCOM1:
GOTO KEYPADEND16
hserout ["A",MDATAT1]
PRESSB:
hserin 10, CHECKA, [WAIT("A"),STR MDATAR1\1]
BUTTONPRESS = "B"
PORTE.0 = 0
GOTO KEYPADEND16
GOTO SERIALCOM2
PRESSC:
BUTTONPRESS = "C"
CHECKA:
GOTO KEYPADEND16
PORTE.0 = 1
PRESSD:
'#################################################
BUTTONPRESS = "D"
###
GOTO KEYPADEND16
'############### SERIAL COM. SLAVE B
################
KEYPADEND16:
'#################################################
IF PORTB = 16 THEN
###
GOTO KEYPADEND
ELSE
GOTO KEYPADEND16
SERIALCOM2:
hserout ["B",MDATAT2,ALARMCUT]
92
hserin 10, CHECKB, [WAIT("B"),STR MDATAR2\1,STR
MDATAT3 = 255
ALARM2\1]
MDATAT4 = 255
PORTE.1 = 0
'#################################################
###
CHECKB:
'#################################################
ALARM = 0
###
PORTE.1 = 1
'#################################################
MAIN:
###
'~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~
'############### SERIAL COM. SLAVE A
~~~~~~~
################
SLAVESELECT:
'#################################################
IF BUTTONPRESS = "A" THEN SLAVE = "A"
###
IF BUTTONPRESS = "B" THEN SLAVE = "B"
SERIALCOM3:
IF BUTTONPRESS = "C" THEN SLAVE = "C"
hserout ["C",MDATAT3]
IF BUTTONPRESS = "D" THEN SLAVE = "D"
hserin 10, CHECKC, [WAIT("C"),STR MDATAR3\1]
PORTA.3 = 0
'~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~
GOTO SERIALCOM4
~~~~~~~
PORTSELECT:
CHECKC:
IF BUTTONPRESS = 1 THEN SEL = 1
PORTA.3 = 1
IF BUTTONPRESS = 2 THEN SEL = 2
'#################################################
IF BUTTONPRESS = 3 THEN SEL = 3
###
IF BUTTONPRESS = 4 THEN SEL = 4
'############### SERIAL COM. SLAVE D
IF BUTTONPRESS = 5 THEN SEL = 5
################
IF BUTTONPRESS = 6 THEN SEL = 6
'#################################################
IF BUTTONPRESS = 7 THEN SEL = 7
###
IF BUTTONPRESS = 8 THEN SEL = 8
SERIALCOM4:
IF BUTTONPRESS = "S" THEN SWITCH = "S"
hserout ["D",MDATAT4,ALARMCUT]
IF BUTTONPRESS = "H" THEN SWITCH = "H"
hserin 10, CHECKD, [WAIT("D"),STR MDATAR4\1,STR
ALARM4\1]
SELECTED:
PORTA.5 = 0
IF SLAVE = "A" THEN SELA
GOTO SERIALEND
IF SLAVE = "B" THEN SELB
IF SLAVE = "C" THEN SELC
CHECKD:
IF SLAVE = "D" THEN SELD
ALARM = 0
GOTO PORTSELEND
PORTA.5 = 1
'#################################################
SELA:
###
IF SEL = 1 AND SWITCH = "S" THEN MDATAT1.0 = 0
'################# SERIAL COM. PC
IF SEL = 2 AND SWITCH = "S" THEN MDATAT1.1 = 0
###################
IF SEL = 3 AND SWITCH = "S" THEN MDATAT1.2 = 0
'#################################################
IF SEL = 4 AND SWITCH = "S" THEN MDATAT1.3 = 0
###
IF SEL = 5 AND SWITCH = "S" THEN MDATAT1.4 = 0
SERIALEND:
IF SEL = 6 AND SWITCH = "S" THEN MDATAT1.5 = 0
IF SEL = 7 AND SWITCH = "S" THEN MDATAT1.6 = 0
MDATAT1 = 255
IF SEL = 8 AND SWITCH = "S" THEN MDATAT1.7 = 0
MDATAT2 = 255
GOTO PORTSELEND
93
SELB:
SELAD:
IF SEL = 1 AND SWITCH = "S" THEN MDATAT2.0 = 0
LCDOUT $FE, 1, "A:"
IF SEL = 2 AND SWITCH = "S" THEN MDATAT2.1 = 0
IF SEL = 1 AND MDATAR1.0 = 1 THEN LCDOUT
IF SEL = 3 AND SWITCH = "S" THEN MDATAT2.2 = 0
"LAMP1=ON"
IF SEL = 4 AND SWITCH = "S" THEN MDATAT2.3 = 0
IF SEL = 1 AND MDATAR1.0 = 0 THEN LCDOUT
IF SEL = 1 AND SWITCH = "H" THEN MDATAT2.4 = 0
"LAMP1=OFF"
IF SEL = 2 AND SWITCH = "H" THEN MDATAT2.5 = 0
IF SEL = 3 AND SWITCH = "H" THEN MDATAT2.6 = 0
IF SEL = 2 AND MDATAR1.1 = 1 THEN LCDOUT
IF SEL = 4 AND SWITCH = "H" THEN MDATAT2.7 = 0
"LAMP2=ON"
GOTO PORTSELEND
IF SEL = 2 AND MDATAR1.1 = 0 THEN LCDOUT
"LAMP2=OFF"
SELC:
IF SEL = 1 AND SWITCH = "S" THEN MDATAT3.0 = 0
IF SEL = 3 AND MDATAR1.2 = 1 THEN LCDOUT
IF SEL = 2 AND SWITCH = "S" THEN MDATAT3.1 = 0
"LAMP3=ON"
IF SEL = 3 AND SWITCH = "S" THEN MDATAT3.2 = 0
IF SEL = 3 AND MDATAR1.2 = 0 THEN LCDOUT
IF SEL = 4 AND SWITCH = "S" THEN MDATAT3.3 = 0
"LAMP3=OFF"
IF SEL = 5 AND SWITCH = "S" THEN MDATAT3.4 = 0
IF SEL = 6 AND SWITCH = "S" THEN MDATAT3.5 = 0
IF SEL = 4 AND MDATAR1.3 = 1 THEN LCDOUT
IF SEL = 7 AND SWITCH = "S" THEN MDATAT3.6 = 0
"LAMP4=ON"
IF SEL = 8 AND SWITCH = "S" THEN MDATAT3.7 = 0
IF SEL = 4 AND MDATAR1.3 = 0 THEN LCDOUT
GOTO PORTSELEND
"LAMP4=OFF"
SELD:
IF SEL = 5 AND MDATAR1.4 = 1 THEN LCDOUT
IF SEL = 1 AND SWITCH = "S" THEN MDATAT4.0 = 0
"FAN1=ON"
IF SEL = 2 AND SWITCH = "S" THEN MDATAT4.1 = 0
IF SEL = 5 AND MDATAR1.4 = 0 THEN LCDOUT
IF SEL = 3 AND SWITCH = "S" THEN MDATAT4.2 = 0
"FAN1=OFF"
IF SEL = 4 AND SWITCH = "S" THEN MDATAT4.3 = 0
IF SEL = 5 AND SWITCH = "H" THEN MDATAT4.4 = 0
IF SEL = 6 AND MDATAR1.5 = 1 THEN LCDOUT
IF SEL = 6 AND SWITCH = "H" THEN MDATAT4.5 = 0
"FAN2=ON"
IF SEL = 7 AND SWITCH = "H" THEN MDATAT4.6 = 0
IF SEL = 6 AND MDATAR1.5 = 0 THEN LCDOUT
IF SEL = 8 AND SWITCH = "H" THEN MDATAT4.7 = 0
"FAN2=OFF"
GOTO PORTSELEND
IF SEL = 7 AND MDATAR1.6 = 1 THEN LCDOUT
PORTSELEND:
"FAN3=ON"
IF SEL = 7 AND MDATAR1.6 = 0 THEN LCDOUT
"FAN3=OFF"
'$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$
$$$$$$$$$$
IF SEL = 8 AND MDATAR1.7 = 1 THEN LCDOUT
"FAN4=ON"
IF SEL = 8 AND MDATAR1.7 = 0 THEN LCDOUT
DISPLAY:
"FAN4=OFF"
IF SLAVE = "A" THEN SELAD
GOTO DISPLAYEND
IF SLAVE = "B" THEN SELBD
IF SLAVE = "C" THEN SELCD
SELBD:
IF SLAVE = "D" THEN SELDD
LCDOUT $FE, 1, "B:"
GOTO DISPLAYEND
94
IF SEL = 1 AND MDATAR2.0 = 0 AND MDATAR2.4 = 0
GOTO DISPLAYEND
THEN DOOR1NLOCK
IF SEL = 1 AND MDATAR2.0 = 0 AND MDATAR2.4 = 1
DOOR3NLOCK:
THEN DOOR1LOCK
LCDOUT "DOOR3=CLOSED"
IF SEL = 1 AND MDATAR2.0 = 1 THEN DOOR1OPEN
LCDOUT $FE, $C0, "UNLOCKED"
GOTO DISPLAYEND
IF SEL = 2 AND MDATAR2.1 = 0 AND MDATAR2.5 = 0
DOOR3LOCK:
THEN DOOR2NLOCK
LCDOUT "DOOR3=CLOSED"
IF SEL = 2 AND MDATAR2.1 = 0 AND MDATAR2.5 = 1
LCDOUT $FE, $C0, "LOCKED"
THEN DOOR2LOCK
GOTO DISPLAYEND
IF SEL = 2 AND MDATAR2.1 = 1 THEN DOOR2OPEN
DOOR3OPEN:
LCDOUT "DOOR3=OPENED"
IF SEL = 3 AND MDATAR2.2 = 0 AND MDATAR2.6 = 0
GOTO DISPLAYEND
THEN DOOR3NLOCK
IF SEL = 3 AND MDATAR2.2 = 0 AND MDATAR2.6 = 1
DOOR4NLOCK:
THEN DOOR3LOCK
LCDOUT "DOOR4=CLOSED"
IF SEL = 3 AND MDATAR2.2 = 1 THEN DOOR3OPEN
LCDOUT $FE, $C0, "UNLOCKED"
GOTO DISPLAYEND
IF SEL = 4 AND MDATAR2.3 = 0 AND MDATAR2.7 = 0
DOOR4LOCK:
THEN DOOR4NLOCK
LCDOUT "DOOR4=CLOSED"
IF SEL = 4 AND MDATAR2.3 = 0 AND MDATAR2.7 = 1
LCDOUT $FE, $C0, "LOCKED"
THEN DOOR4LOCK
GOTO DISPLAYEND
IF SEL = 4 AND MDATAR2.3 = 1 THEN DOOR4OPEN
DOOR4OPEN:
GOTO DISPLAYEND
LCDOUT "DOOR4=OPENED"
GOTO DISPLAYEND
DOOR1NLOCK:
LCDOUT "DOOR1=CLOSED"
LCDOUT $FE, $C0, "UNLOCKED"
SELCD:
GOTO DISPLAYEND
LCDOUT $FE, 1, "C:"
DOOR1LOCK:
IF SEL = 1 AND MDATAR3.0 = 1 THEN LCDOUT
LCDOUT "DOOR1=CLOSED"
"LAMP1=ON"
LCDOUT $FE, $C0, "LOCKED"
IF SEL = 1 AND MDATAR3.0 = 0 THEN LCDOUT
GOTO DISPLAYEND
"LAMP1=OFF"
DOOR1OPEN:
LCDOUT "DOOR1=OPENED"
IF SEL = 2 AND MDATAR3.1 = 1 THEN LCDOUT
GOTO DISPLAYEND
"LAMP2=ON"
IF SEL = 2 AND MDATAR3.1 = 0 THEN LCDOUT
DOOR2NLOCK:
"LAMP2=OFF"
LCDOUT "DOOR2=CLOSED"
LCDOUT $FE, $C0, "UNLOCKED"
IF SEL = 3 AND MDATAR3.2 = 1 THEN LCDOUT
GOTO DISPLAYEND
"LAMP3=ON"
DOOR2LOCK:
IF SEL = 3 AND MDATAR3.2 = 0 THEN LCDOUT
LCDOUT "DOOR2=CLOSED"
"LAMP3=OFF"
LCDOUT $FE, $C0, "LOCKED"
GOTO DISPLAYEND
IF SEL = 4 AND MDATAR3.3 = 1 THEN LCDOUT
DOOR2OPEN:
"LAMP4=ON"
LCDOUT "DOOR2=OPENED"
95
IF SEL = 4 AND MDATAR3.3 = 0 THEN LCDOUT
IF SEL = 4 AND MDATAR4.3 = 0 AND MDATAR4.7 = 1
"LAMP4=OFF"
THEN DOOR4LOCK2
IF SEL = 4 AND MDATAR4.3 = 1 THEN DOOR4OPEN2
IF SEL = 5 AND MDATAR3.4 = 1 THEN LCDOUT
GOTO DISPLAYEND
"FAN1=ON"
IF SEL = 5 AND MDATAR3.4 = 0 THEN LCDOUT
DOOR1NLOCK2:
"FAN1=OFF"
LCDOUT "DOOR1=CLOSED"
LCDOUT $FE, $C0, "UNLOCKED"
IF SEL = 6 AND MDATAR3.5 = 1 THEN LCDOUT
GOTO DISPLAYEND
"FAN2=ON"
DOOR1LOCK2:
IF SEL = 6 AND MDATAR3.5 = 0 THEN LCDOUT
LCDOUT "DOOR1=CLOSED"
"FAN2=OFF"
LCDOUT $FE, $C0, "LOCKED"
GOTO DISPLAYEND
IF SEL = 7 AND MDATAR3.6 = 1 THEN LCDOUT
DOOR1OPEN2:
"FAN3=ON"
LCDOUT "DOOR1=OPENED"
IF SEL = 7 AND MDATAR3.6 = 0 THEN LCDOUT
GOTO DISPLAYEND
"FAN3=OFF"
DOOR2NLOCK2:
IF SEL = 8 AND MDATAR3.7 = 1 THEN LCDOUT
LCDOUT "DOOR2=CLOSED"
"FAN4=ON"
LCDOUT $FE, $C0, "UNLOCKED"
IF SEL = 8 AND MDATAR3.7 = 0 THEN LCDOUT
GOTO DISPLAYEND
"FAN4=OFF"
DOOR2LOCK2:
GOTO DISPLAYEND
LCDOUT "DOOR2=CLOSED"
LCDOUT $FE, $C0, "LOCKED"
SELDD:
GOTO DISPLAYEND
LCDOUT $FE, 1, "D:"
DOOR2OPEN2:
IF SEL = 1 AND MDATAR4.0 = 0 AND MDATAR4.4 = 0
LCDOUT "DOOR2=OPENED"
THEN DOOR1NLOCK2
GOTO DISPLAYEND
IF SEL = 1 AND MDATAR4.0 = 0 AND MDATAR4.4 = 1
THEN DOOR1LOCK2
DOOR3NLOCK2:
IF SEL = 1 AND MDATAR4.0 = 1 THEN DOOR1OPEN2
LCDOUT "DOOR3=CLOSED"
LCDOUT $FE, $C0, "UNLOCKED"
IF SEL = 2 AND MDATAR4.1 = 0 AND MDATAR4.5 = 0
GOTO DISPLAYEND
THEN DOOR2NLOCK2
DOOR3LOCK2:
IF SEL = 2 AND MDATAR4.1 = 0 AND MDATAR4.5 = 1
LCDOUT "DOOR3=CLOSED"
THEN DOOR2LOCK2
LCDOUT $FE, $C0, "LOCKED"
IF SEL = 2 AND MDATAR4.1 = 1 THEN DOOR2OPEN2
GOTO DISPLAYEND
DOOR3OPEN2:
IF SEL = 3 AND MDATAR4.2 = 0 AND MDATAR4.6 = 0
LCDOUT "DOOR3=OPENED"
THEN DOOR3NLOCK2
GOTO DISPLAYEND
IF SEL = 3 AND MDATAR4.2 = 0 AND MDATAR4.6 = 1
THEN DOOR3LOCK2
DOOR4NLOCK2:
IF SEL = 3 AND MDATAR4.2 = 1 THEN DOOR3OPEN2
LCDOUT "DOOR4=CLOSED"
LCDOUT $FE, $C0, "UNLOCKED"
IF SEL = 4 AND MDATAR4.3 = 0 AND MDATAR4.7 = 0
GOTO DISPLAYEND
THEN DOOR4NLOCK2
DOOR4LOCK2:
LCDOUT "DOOR4=CLOSED"
96
LCDOUT $FE, $C0, "LOCKED"
GOTO DISPLAYEND
ALARM_OUT:
DOOR4OPEN2:
PORTC = ALARM
LCDOUT "DOOR4=OPENED"
LCDOUT $FE, 1, "ALARM"
GOTO DISPLAYEND
PAUSE 500
PORTC = ALARM
DISPLAYEND:
ALARMCUT = 255
hserout ["B",MDATAT2,ALARMCUT]
ALARM_TEST:
PAUSE 20
IF ALARM2.0 = 1 OR ALARM4.0 = 1 THEN ALARM.0 =
hserout ["D",MDATAT4,ALARMCUT]
1
LCDOUT $FE, 1
IF ALARM2.1 = 1 OR ALARM4.1 = 1 THEN ALARM.1 =
PAUSE 500
1
IF ALARM2.2 = 1 OR ALARM4.2 = 1 THEN ALARM.2 =
IF PORTA.0 = 0 THEN
1
GOTO START
IF ALARM2.3 = 1 OR ALARM4.3 = 1 THEN ALARM.3 =
ELSE
1
GOTO ALARM_OUT
ENDIF
PORTC = ALARM
END
IF ALARM = 0 THEN GOTO START
97
APPENDIX E
Sources Code of Slave Controller A
DEFINE OSC 10
PAUSE 500
Define HSER_BAUD 9600
PORTB = 0
DEFINE HSER_CLROERR 1
PORTB.7 = 1
DEFINE HSER_RCSTA 90h
PAUSE 500
DEFINE HSER_TXSTA 20h
PORTB = 0
NAME VAR BYTE
DATAT VAR BYTE
PORTB = 0
‘Variable transmit data to Master
PORTD = 255
DATAR VAR BYTE
DATAR = 255
‘Variable Receive data from Master
'*************************************************
DATAS VAR BYTE
***************
DATAD VAR BYTE
START:
DATAT = PORTB
ADCON1 = 7
DATAR = 255
TRISB = 0
PORTC.5 = 0
TRISD = 255
PAUSE 1
TRISC = %10000000
hserin [WAIT("A"),STR DATAR\1]
hserout ["A",DATAT]
PORTB = 0
''################################################
####
PORTB.0 = 1
PAUSE 500
'#################################################
PORTB = 0
########################
PORTB.1 = 1
'#################################################
PAUSE 500
########################
PORTB = 0
'#################################################
PORTB.2 = 1
########################
PAUSE 500
TESTB0S:
PORTB = 0
DATAS = DATAR
PORTB.3 = 1
PAUSE 500
PORTB = 0
PORTB.4 = 1
PAUSE 500
PORTB = 0
IF (PORTB.0 = 0) THEN
GOTO B0LOWS
ELSE
GOTO B0HIGHS
ENDIF
PORTB.5 = 1
PAUSE 500
B0LOWS:
PORTB = 0
IF (DATAS.0 = 0) THEN
PORTB.6 = 1
GOTO HIGHB0S
98
ELSE
GOTO LOWB0S
ENDIF
'#################################################
########################
TESTB2S:
IF (PORTB.2 = 0) THEN
B0HIGHS:
IF (DATAS.0 = 0) THEN
GOTO LOWB0S
ELSE
GOTO B2LOWS
ELSE
GOTO B2HIGHS
ENDIF
GOTO HIGHB0S
ENDIF
B2LOWS:
IF (DATAS.2 = 0) THEN
HIGHB0S:
PORTB.0 = 1
GOTO TESTB1S
LOWB0S:
GOTO HIGHB2S
ELSE
GOTO LOWB2S
ENDIF
PORTB.0 = 0
GOTO TESTB1S
B2HIGHS:
'#################################################
IF (DATAS.2 = 0) THEN
########################
TESTB1S:
IF (PORTB.1 = 0) THEN
GOTO B1LOWS
GOTO LOWB2S
ELSE
GOTO HIGHB2S
ENDIF
ELSE
GOTO B1HIGHS
ENDIF
HIGHB2S:
PORTB.2 = 1
GOTO TESTB3S
B1LOWS:
LOWB2S:
IF (DATAS.1 = 0) THEN
PORTB.2 = 0
GOTO HIGHB1S
ELSE
GOTO LOWB1S
ENDIF
GOTO TESTB3S
'#################################################
########################
TESTB3S:
IF (PORTB.3 = 0) THEN
B1HIGHS:
IF (DATAS.1 = 0) THEN
GOTO LOWB1S
ELSE
GOTO B3LOWS
ELSE
GOTO B3HIGHS
ENDIF
GOTO HIGHB1S
ENDIF
B3LOWS:
IF (DATAS.3 = 0) THEN
HIGHB1S:
PORTB.1 = 1
GOTO TESTB2S
LOWB1S:
GOTO HIGHB3S
ELSE
GOTO LOWB3S
ENDIF
PORTB.1 = 0
GOTO TESTB2S
B3HIGHS:
IF (DATAS.3 = 0) THEN
99
GOTO LOWB3S
ENDIF
ELSE
GOTO HIGHB3S
ENDIF
B5LOWS:
IF (DATAS.5 = 0) THEN
GOTO HIGHB5S
HIGHB3S:
PORTB.3 = 1
GOTO TESTB4S
ELSE
GOTO LOWB5S
ENDIF
LOWB3S:
PORTB.3 = 0
B5HIGHS:
GOTO TESTB4S
IF (DATAS.5 = 0) THEN
'#################################################
########################
TESTB4S:
IF (PORTB.4 = 0) THEN
GOTO LOWB5S
ELSE
GOTO HIGHB5S
ENDIF
GOTO B4LOWS
ELSE
GOTO B4HIGHS
ENDIF
HIGHB5S:
PORTB.5 = 1
GOTO TESTB6S
LOWB5S:
B4LOWS:
PORTB.5 = 0
IF (DATAS.4 = 0) THEN
GOTO TESTB6S
GOTO HIGHB4S
ELSE
GOTO LOWB4S
'#################################################
########################
TESTB6S:
ENDIF
IF (PORTB.6 = 0) THEN
B4HIGHS:
ELSE
GOTO B6LOWS
IF (DATAS.4 = 0) THEN
GOTO LOWB4S
GOTO B6HIGHS
ENDIF
ELSE
GOTO HIGHB4S
ENDIF
B6LOWS:
IF (DATAS.6 = 0) THEN
GOTO HIGHB6S
HIGHB4S:
PORTB.4 = 1
GOTO TESTB5S
ELSE
GOTO LOWB6S
ENDIF
LOWB4S:
PORTB.4 = 0
B6HIGHS:
GOTO TESTB5S
IF (DATAS.6 = 0) THEN
'#################################################
########################
TESTB5S:
IF (PORTB.5 = 0) THEN
GOTO LOWB6S
ELSE
GOTO HIGHB6S
ENDIF
GOTO B5LOWS
ELSE
GOTO B5HIGHS
HIGHB6S:
PORTB.6 = 1
100
GOTO TESTB7S
LOWB6S:
B0LOW:
PORTB.6 = 0
IF (PORTD.0 = 0) THEN
GOTO TESTB7S
'#################################################
########################
TESTB7S:
GOTO HIGHB0
ELSE
GOTO LOWB0
ENDIF
IF (PORTB.7 = 0) THEN
GOTO B7LOWS
ELSE
GOTO B7HIGHS
B0HIGH:
IF (PORTD.0 = 0) THEN
GOTO LOWB0
ENDIF
ELSE
B7LOWS:
ENDIF
GOTO HIGHB0
IF (DATAS.7 = 0) THEN
GOTO HIGHB7S
ELSE
GOTO LOWB7S
ENDIF
HIGHB0:
PORTB.0 = 1
GOTO TESTB1
LOWB0:
PORTB.0 = 0
B7HIGHS:
GOTO TESTB1
IF (DATAS.7 = 0) THEN
'#################################################
GOTO LOWB7S
ELSE
GOTO HIGHB7S
ENDIF
########################
TESTB1:
IF (PORTB.1 = 0) THEN
GOTO B1LOW
ELSE
HIGHB7S:
PORTB.7 = 1
GOTO B1HIGH
ENDIF
GOTO TESTB0
LOWB7S:
B1LOW:
PORTB.7 = 0
IF (PORTD.1 = 0) THEN
GOTO TESTB0
'#################################################
########################
'#################################################
GOTO HIGHB1
ELSE
GOTO LOWB1
ENDIF
########################
'#################################################
B1HIGH:
########################
IF (PORTD.1 = 0) THEN
TESTB0:
ELSE
IF (PORTB.0 = 0) THEN
ENDIF
GOTO LOWB1
GOTO HIGHB1
GOTO B0LOW
ELSE
GOTO B0HIGH
ENDIF
HIGHB1:
PORTB.1 = 1
GOTO TESTB2
101
LOWB1:
PORTB.1 = 0
B3HIGH:
GOTO TESTB2
IF (PORTD.3 = 0) THEN
'#################################################
########################
TESTB2:
IF (PORTB.2 = 0) THEN
GOTO LOWB3
ELSE
GOTO HIGHB3
ENDIF
GOTO B2LOW
ELSE
GOTO B2HIGH
ENDIF
HIGHB3:
PORTB.3 = 1
GOTO TESTB4
LOWB3:
B2LOW:
PORTB.3 = 0
IF (PORTD.2 = 0) THEN
GOTO TESTB4
GOTO HIGHB2
ELSE
GOTO LOWB2
ENDIF
'#################################################
########################
TESTB4:
IF (PORTB.4 = 0) THEN
GOTO B4LOW
B2HIGH:
IF (PORTD.2 = 0) THEN
GOTO LOWB2
ELSE
GOTO B4HIGH
ENDIF
ELSE
GOTO HIGHB2
B4LOW:
ENDIF
IF (PORTD.4 = 0) THEN
HIGHB2:
ELSE
GOTO HIGHB4
PORTB.2 = 1
GOTO TESTB3
GOTO LOWB4
ENDIF
LOWB2:
PORTB.2 = 0
B4HIGH:
GOTO TESTB3
IF (PORTD.4 = 0) THEN
'#################################################
########################
TESTB3:
IF (PORTB.3 = 0) THEN
GOTO LOWB4
ELSE
GOTO HIGHB4
ENDIF
GOTO B3LOW
ELSE
GOTO B3HIGH
ENDIF
HIGHB4:
PORTB.4 = 1
GOTO TESTB5
LOWB4:
B3LOW:
PORTB.4 = 0
IF (PORTD.3 = 0) THEN
GOTO TESTB5
GOTO HIGHB3
ELSE
GOTO LOWB3
ENDIF
'#################################################
########################
TESTB5:
IF (PORTB.5 = 0) THEN
102
GOTO B5LOW
ELSE
GOTO B5HIGH
ENDIF
HIGHB6:
PORTB.6 = 1
GOTO TESTB7
LOWB6:
B5LOW:
PORTB.6 = 0
IF (PORTD.5 = 0) THEN
GOTO TESTB7
GOTO HIGHB5
ELSE
GOTO LOWB5
ENDIF
'#################################################
########################
TESTB7:
IF (PORTB.7 = 0) THEN
GOTO B7LOW
B5HIGH:
IF (PORTD.5 = 0) THEN
GOTO LOWB5
ELSE
GOTO B7HIGH
ENDIF
ELSE
GOTO HIGHB5
ENDIF
B7LOW:
IF (PORTD.7 = 0) THEN
GOTO HIGHB7
HIGHB5:
PORTB.5 = 1
GOTO TESTB6
ELSE
GOTO LOWB7
ENDIF
LOWB5:
PORTB.5 = 0
B7HIGH:
GOTO TESTB6
IF (PORTD.7 = 0) THEN
'#################################################
########################
TESTB6:
IF (PORTB.6 = 0) THEN
GOTO LOWB7
ELSE
GOTO HIGHB7
ENDIF
GOTO B6LOW
ELSE
GOTO B6HIGH
ENDIF
HIGHB7:
PORTB.7 = 1
GOTO CLEARBIT
LOWB7:
B6LOW:
PORTB.7 = 0
IF (PORTD.6 = 0) THEN
GOTO CLEARBIT
GOTO HIGHB6
ELSE
GOTO LOWB6
ENDIF
'&&&&&&&&&&&&&&&&&&&&&&&&&&&&&&&
&&&&&&&&&&&&&
CLEARBIT:
IF (PORTD = 255) THEN
GOTO START
B6HIGH:
IF (PORTD.6 = 0) THEN
GOTO LOWB6
ELSE
GOTO CLEARBIT
ENDIF
ELSE
GOTO HIGHB6
ENDIF
end
103
APPENDIX F
Sources Code of Slave Controller B
DEFINE OSC 10
'*************************************************
DEFINE HSER_BAUD 9600
***************
DEFINE HSER_CLROERR 1
START:
DEFINE HSER_RCSTA 90h
DEFINE HSER_TXSTA 20h
D1TEST:
IF PORTB.4 = 1 AND PORTA.0 = 1 THEN A1
NAME VAR BYTE
DATAT VAR BYTE
A0:
‘Variable transmit data to Master
IF PORTB.5 = 1 AND PORTA.1 = 1 THEN A0B1
DATAR VAR BYTE
‘Variable receive data from Master
A0B0:
DATAS VAR BYTE
IF PORTB.6 = 1 AND PORTA.2 = 1 THEN A0B0C1
DATAD VAR BYTE
ALARMR VAR BYTE
A0B0C0:
‘Variable receive alarm status from Master
IF PORTB.7 = 1 AND PORTA.3 = 1 THEN A0B0C0D1
ALARM VAR BYTE
‘Variable transmit alarm status to Master
A0B0C0D0:
ALARM = %00000000
D1 VAR BIT
GOTO ALARMTEST
D2 VAR BIT
D3 VAR BIT
A0B0C0D1:
D4 VAR BIT
ALARM = %00000001
GOTO ALARMTEST
ADCON1 = 7
TRISA = 255
A0B0C1:
TRISB = 0
IF PORTB.7 = 1 AND PORTA.3 = 1 THEN A0B0C1D1
TRISD = 255
TRISE = 0
A0B0C1D0:
TRISC = %10100000
ALARM = %00000010
GOTO ALARMTEST
PORTA = 255
PORTB = 0
A0B0C1D1:
PORTD = 255
ALARM = %00000011
PORTE = 0
GOTO ALARMTEST
PORTC = 0
A0B1:
ALARMR = 0
IF PORTB.6 = 1 AND PORTA.2 = 1 THEN A0B1C1
ALARM = 0
A0B1C0:
IF PORTB.7 = 1 AND PORTA.3 = 1 THEN A0B1C0D1
104
A1B1:
A0B1C0D0:ALARM = %00000100
IF PORTB.6 = 1 AND PORTA.2 = 1 THEN A1B1C1
GOTO ALARMTEST
A1B1C0:
A0B1C0D1:
IF PORTB.7 = 1 AND PORTA.3 = 1 THEN A1B1C0D1
ALARM = %00000101
GOTO ALARMTEST
A1B1C0D0:
ALARM = %00001100
A0B1C1:
GOTO ALARMTEST
IF PORTB.7 = 1 AND PORTA.3 = 1 THEN A0B1C1D1
A1B1C0D1:
A0B1C1D0:
ALARM = %00001101
ALARM = %00000110
GOTO ALARMTEST
GOTO ALARMTEST
A1B1C1:
A0B1C1D1:
IF PORTB.7 = 1 AND PORTA.3 = 1 THEN A1B1C1D1
ALARM = %00000111
GOTO ALARMTEST
A1B1C1D0:
'$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$
ALARM = %00001110
A1:
GOTO ALARMTEST
IF PORTB.5 = 1 AND PORTA.1 = 1 THEN A1B1
A1B1C1D1:
A1B0:
ALARM = %00001111
IF PORTB.6 = 1 AND PORTA.2 = 1 THEN A1B0C1
GOTO ALARMTEST
A1B0C0:
ALARMTEST:
IF PORTB.7 = 1 AND PORTA.3 = 1 THEN A1B0C0D1
A1B0C0D0:
SERIALCOM:
ALARM = %00001000
PORTC = ALARM
GOTO ALARMTEST
DATAT = PORTB
hserin [WAIT("B"),STR DATAR\1,STR ALARMR\1]
A1B0C0D1:
hserout ["B",DATAT,ALARM]
ALARM = %00001001
''################################################
GOTO ALARMTEST
####
ALARMRTEST:
A1B0C1:
IF PORTB.7 = 1 AND PORTA.3 = 1 THEN A1B0C1D1
IF ALARMR = 0 THEN
GOTO TESTB0S
ELSE
A1B0C1D0:
ALARM = %00001010
GOTO CUTOFF
ENDIF
GOTO ALARMTEST
CUTOFF:
A1B0C1D1:
hserin [WAIT("B"),STR DATAR\1,STR ALARMR\1]
ALARM = %00001011
GOTO ALARMRTEST
GOTO ALARMTEST
'#################################################
########################
105
'#################################################
ENDIF
########################
'#################################################
TESTB1SL:
########################
IF (PORTB.1 = 0) THEN
TESTB0S:
ALARM = 0
DATAS = DATAR
IF (PORTB.4 = 0) THEN
GOTO B1LOWS
ELSE
GOTO B1HIGHS
ENDIF
GOTO TESTB0SL
ELSE
GOTO TESTB1S
ENDIF
B1LOWS:
IF (DATAS.1 = 0) THEN
GOTO HIGHB1S
ELSE
TESTB0SL:
IF (PORTB.0 = 0) THEN
GOTO LOWB1S
ENDIF
GOTO B0LOWS
ELSE
GOTO B0HIGHS
ENDIF
B1HIGHS:
IF (DATAS.1 = 0) THEN
GOTO LOWB1S
ELSE
B0LOWS:
IF (DATAS.0 = 0) THEN
GOTO HIGHB1S
ENDIF
GOTO HIGHB0S
ELSE
GOTO LOWB0S
ENDIF
HIGHB1S:
PORTB.1 = 1
GOTO TESTB2S
LOWB1S:
B0HIGHS:
PORTB.1 = 0
IF (DATAS.0 = 0) THEN
GOTO TESTB2S
GOTO LOWB0S
ELSE
GOTO HIGHB0S
ENDIF
'#################################################
########################
TESTB2S:
IF (PORTB.6 = 0) THEN
GOTO TESTB2SL
HIGHB0S:
PORTB.0 = 1
GOTO TESTB1S
ELSE
GOTO TESTB3S
ENDIF
LOWB0S:
PORTB.0 = 0
TESTB2SL:
GOTO TESTB1S
IF (PORTB.2 = 0) THEN
'#################################################
########################
TESTB1S:
IF (PORTB.5 = 0) THEN
GOTO B2LOWS
ELSE
GOTO B2HIGHS
ENDIF
GOTO TESTB1SL
ELSE
GOTO TESTB2S
B2LOWS:
IF (DATAS.2 = 0) THEN
106
GOTO HIGHB2S
ELSE
GOTO LOWB2S
ENDIF
HIGHB3S:
PORTB.3 = 1
GOTO TESTB4S
LOWB3S:
B2HIGHS:
PORTB.3 = 0
IF (DATAS.2 = 0) THEN
GOTO TESTB4S
GOTO LOWB2S
ELSE
GOTO HIGHB2S
ENDIF
'#################################################
########################
TESTB4S:
IF (PORTB.0 = 0) THEN
GOTO TESTB4SC
HIGHB2S:
PORTB.2 = 1
GOTO TESTB3S
ELSE
GOTO TESTB5S
ENDIF
LOWB2S:
PORTB.2 = 0
TESTB4SC:
GOTO TESTB3S
IF (PORTB.4 = 0) THEN
'#################################################
########################
TESTB3S:
IF (PORTB.7 = 0) THEN
GOTO B4LOWS
ELSE
GOTO B4HIGHS
ENDIF
GOTO TESTB3SL
ELSE
GOTO TESTB4S
ENDIF
B4LOWS:
IF (DATAS.4 = 0) THEN
GOTO HIGHB4S
ELSE
TESTB3SL:
IF (PORTB.3 = 0) THEN
GOTO LOWB4S
ENDIF
GOTO B3LOWS
ELSE
GOTO B3HIGHS
ENDIF
B4HIGHS:
IF (DATAS.4 = 0) THEN
GOTO LOWB4S
ELSE
B3LOWS:
IF (DATAS.3 = 0) THEN
GOTO HIGHB4S
ENDIF
GOTO HIGHB3S
ELSE
GOTO LOWB3S
ENDIF
HIGHB4S:
PORTB.4 = 1
GOTO TESTB5S
LOWB4S:
B3HIGHS:
PORTB.4 = 0
IF (DATAS.3 = 0) THEN
GOTO TESTB5S
GOTO LOWB3S
ELSE
GOTO HIGHB3S
ENDIF
'#################################################
########################
TESTB5S:
IF (PORTB.1 = 0) THEN
107
GOTO TESTB5SC
ELSE
GOTO TESTB6S
ENDIF
B6LOWS:
IF (DATAS.6 = 0) THEN
GOTO HIGHB6S
ELSE
TESTB5SC:
IF (PORTB.5 = 0) THEN
GOTO LOWB6S
ENDIF
GOTO B5LOWS
ELSE
GOTO B5HIGHS
ENDIF
B6HIGHS:
IF (DATAS.6 = 0) THEN
GOTO LOWB6S
ELSE
B5LOWS:
IF (DATAS.5 = 0) THEN
GOTO HIGHB6S
ENDIF
GOTO HIGHB5S
ELSE
GOTO LOWB5S
ENDIF
HIGHB6S:
PORTB.6 = 1
GOTO TESTB7S
LOWB6S:
B5HIGHS:
PORTB.6 = 0
IF (DATAS.5 = 0) THEN
GOTO TESTB7S
GOTO LOWB5S
ELSE
GOTO HIGHB5S
'#################################################
########################
TESTB7S:
ENDIF
IF (PORTB.3 = 0) THEN
HIGHB5S:
ELSE
GOTO TESTB7SC
PORTB.5 = 1
GOTO TESTB6S
GOTO TESTB0
ENDIF
LOWB5S:
PORTB.5 = 0
TESTB7SC:
GOTO TESTB6S
IF (PORTB.7 = 0) THEN
'#################################################
########################
TESTB6S:
IF (PORTB.2 = 0) THEN
GOTO B7LOWS
ELSE
GOTO B7HIGHS
ENDIF
GOTO TESTB6SC
ELSE
GOTO TESTB7S
ENDIF
B7LOWS:
IF (DATAS.7 = 0) THEN
GOTO HIGHB7S
ELSE
TESTB6SC:
IF (PORTB.6 = 0) THEN
GOTO LOWB7S
ENDIF
GOTO B6LOWS
ELSE
GOTO B6HIGHS
ENDIF
B7HIGHS:
IF (DATAS.7 = 0) THEN
GOTO LOWB7S
108
ELSE
GOTO HIGHB7S
ENDIF
GOTO TESTB1
LOWB0:
PORTB.0 = 0
GOTO TESTB1
HIGHB7S:
'#################################################
PORTB.7 = 1
########################
GOTO TESTB0
TESTB1:
LOWB7S:
IF (PORTB.5 = 0) THEN
PORTB.7 = 0
GOTO TESTB0
'#################################################
########################
GOTO TESTB1L
ELSE
GOTO TESTB2
ENDIF
'#################################################
########################
TESTB1L:
'#################################################
IF (PORTB.1 = 0) THEN
########################
GOTO B1LOW
ELSE
TESTB0:
IF (PORTB.4 = 0) THEN
GOTO B1HIGH
ENDIF
GOTO TESTB0L
ELSE
GOTO TESTB1
ENDIF
B1LOW:
IF (PORTD.1 = 0) THEN
GOTO HIGHB1
ELSE
TESTB0L:
IF (PORTB.0 = 0) THEN
GOTO LOWB1
ENDIF
GOTO B0LOW
ELSE
GOTO B0HIGH
ENDIF
B1HIGH:
IF (PORTD.1 = 0) THEN
GOTO LOWB1
ELSE
B0LOW:
IF (PORTD.0 = 0) THEN
GOTO HIGHB1
ENDIF
GOTO HIGHB0
ELSE
GOTO LOWB0
ENDIF
HIGHB1:
PORTB.1 = 1
GOTO TESTB2
LOWB1:
B0HIGH:
PORTB.1 = 0
IF (PORTD.0 = 0) THEN
GOTO TESTB2
GOTO LOWB0
ELSE
GOTO HIGHB0
ENDIF
'#################################################
########################
TESTB2:
IF (PORTB.6 = 0) THEN
GOTO TESTB2L
HIGHB0:
PORTB.0 = 1
ELSE
GOTO TESTB3
109
ENDIF
GOTO HIGHB3
ELSE
TESTB2L:
IF (PORTB.2 = 0) THEN
GOTO LOWB3
ENDIF
GOTO B2LOW
ELSE
GOTO B2HIGH
ENDIF
B3HIGH:
IF (PORTD.3 = 0) THEN
GOTO LOWB3
ELSE
B2LOW:
IF (PORTD.2 = 0) THEN
GOTO HIGHB3
ENDIF
GOTO HIGHB2
ELSE
GOTO LOWB2
ENDIF
HIGHB3:
PORTB.3 = 1
GOTO TESTB4
LOWB3:
B2HIGH:
PORTB.3 = 0
IF (PORTD.2 = 0) THEN
GOTO TESTB4
GOTO LOWB2
ELSE
GOTO HIGHB2
ENDIF
'#################################################
########################
TESTB4:
IF (PORTB.0 = 0) THEN
GOTO TESTB4C
HIGHB2:
PORTB.2 = 1
GOTO TESTB3
ELSE
GOTO TESTB5
ENDIF
LOWB2:
PORTB.2 = 0
TESTB4C:
GOTO TESTB3
IF (PORTB.4 = 0) THEN
'#################################################
########################
TESTB3:
IF (PORTB.7 = 0) THEN
GOTO B4LOW
ELSE
GOTO B4HIGH
ENDIF
GOTO TESTB3L
ELSE
GOTO TESTB4
ENDIF
B4LOW:
IF (PORTD.4 = 0) THEN
GOTO HIGHB4
ELSE
TESTB3L:
IF (PORTB.3 = 0) THEN
GOTO LOWB4
ENDIF
GOTO B3LOW
ELSE
GOTO B3HIGH
ENDIF
B4HIGH:
IF (PORTD.4 = 0) THEN
GOTO LOWB4
ELSE
B3LOW:
IF (PORTD.3 = 0) THEN
GOTO HIGHB4
ENDIF
110
GOTO TESTB6C
HIGHB4:
PORTB.4 = 1
GOTO TESTB5
ELSE
GOTO TESTB7
ENDIF
LOWB4:
PORTB.4 = 0
TESTB6C:
GOTO TESTB5
IF (PORTB.6 = 0) THEN
'#################################################
########################
TESTB5:
IF (PORTB.1 = 0) THEN
GOTO B6LOW
ELSE
GOTO B6HIGH
ENDIF
GOTO TESTB5C
ELSE
GOTO TESTB6
ENDIF
B6LOW:
IF (PORTD.6 = 0) THEN
GOTO HIGHB6
ELSE
TESTB5C:
IF (PORTB.5 = 0) THEN
GOTO LOWB6
ENDIF
GOTO B5LOW
ELSE
GOTO B5HIGH
ENDIF
B6HIGH:
IF (PORTD.6 = 0) THEN
GOTO LOWB6
ELSE
B5LOW:
IF (PORTD.5 = 0) THEN
GOTO HIGHB6
ENDIF
GOTO HIGHB5
ELSE
GOTO LOWB5
ENDIF
HIGHB6:
PORTB.6 = 1
GOTO TESTB7
LOWB6:
B5HIGH:
PORTB.6 = 0
IF (PORTD.5 = 0) THEN
GOTO TESTB7
GOTO LOWB5
ELSE
GOTO HIGHB5
ENDIF
'#################################################
########################
TESTB7:
IF (PORTB.3 = 0) THEN
GOTO TESTB7C
HIGHB5:
PORTB.5 = 1
GOTO TESTB6
ELSE
GOTO CLEARBIT
ENDIF
LOWB5:
PORTB.5 = 0
TESTB7C:
GOTO TESTB6
IF (PORTB.7 = 0) THEN
'#################################################
########################
TESTB6:
IF (PORTB.2 = 0) THEN
GOTO B7LOW
ELSE
GOTO B7HIGH
ENDIF
111
PORTB.7 = 1
B7LOW:
GOTO CLEARBIT
IF (PORTD.7 = 0) THEN
LOWB7:
GOTO HIGHB7
ELSE
GOTO LOWB7
ENDIF
PORTB.7 = 0
GOTO CLEARBIT
'&&&&&&&&&&&&&&&&&&&&&&&&&&&&&&&
&&&&&&&&&&&&&
CLEARBIT:
B7HIGH:
IF (PORTD.7 = 0) THEN
GOTO LOWB7
ELSE
GOTO HIGHB7
IF (PORTD = 255) THEN
GOTO START
ELSE
GOTO CLEARBIT
ENDIF
ENDIF
end
HIGHB7: