INSTRUCTOR Workbook
QUBE-Servo Experiment for MATLAB /Simulink Users
Standardized for ABET * Evaluation Criteria
Developed by:
Jacob Apkarian, Ph.D., Quanser
Michel Lévis, M.A.SC., Quanser
COURSEWARE SAMPLE
QUBE educational solutions
are powered by:
Course material
complies with:
Captivate. Motivate. Graduate.
*ABET Inc., is the recognized accreditor for college and university programs in applied science, computing, engineering, and technology, providing leadership and quality assurance
in higher education for over 75 years.
COURSEWARE
SAMPLE QUBE™-Servo
PREFACE
Preparing laboratory experiments can be time-consuming. Quanser understands time constraints of teaching
and research professors. That’s why the QUBE-Servo experiment comes with a new generation of mix-andmatch, rich digital media courseware that allows easy adaptation of material to a specific course. The
courseware is also aligned with requirements of ABET accreditation. All this allows professors to get their labs
running faster, saving months of time typically required to develop lab materials and exercises.
Quanser QUBE-Servo courseware provides step-by-step pedagogy for a wide range of control challenges. You
can select a pre-defined lab section where students start with the basic principles and progress to more
advanced applications of control theories. Or you can select a specific topic and use the exercises to
supplement the theory students learnt in class with hands-on experience in lab.
To make the courseware easily adaptable to your specific course, Quanser also offers a comprehensive
mapping of courseware topics to the most popular control engineering textbooks:
•
•
•
•
•
•
•
•
Control Systems Engineering by Norman S. Nise
Feedback Systems by K.J. Åström, R.M. Murray
Feedback Control of Dynamic Systems by G.F. Franklin, J.D. Powell, A. Emai-Naeini
Modern Control Systems by R.C. Dorf, R.H. Bishop
Modern Control Engineering by K. Ogata
Automatic Control Systems by F. Golnaraghi, B.C. Kuo
Control Systems Engineering by I.J. Nagrath, M. Gopal
Mechatronics by W. Bolton
This document provides an abbreviated example of background and in-lab exercise courseware sections for
the QUBE-Servo experiment. Please note that the examples are not complete as they are intended to give
you a brief overview of the structure and content of the courseware you will receive with the QUBE-Servo.
This courseware sample based on the
MATLAB/Simulink software.
material prepared for users
of
The QUBE-Servo courseware is aligned with requirements of ABET accreditation.
©2013 Intellectual property of Quanser. Do not reproduce without written permission.
QUANSER.COM +1-905-940-3575 INFO@QUANSER.COM
Page 1 of 8
COURSEWARE
SAMPLE QUBE™-Servo
1. QUBE™-SERVO COURSEWARE TABLE OF CONTENTS
The full Table of Contents of the Quanser QUBE-Servo courseware is shown here:
1. QUBE-SERVO INTEGRATION
1.1. BACKGROUND
1.1.1. QUARC SOFTWARE
1.1.2. DC MOTOR
1.1.3. ENCODERS
1.2. IN-LAB EXERCISES
1.2.1. CONFIGURING A SIMULINK MODEL FOR THE QUBE-SERVO
1.2.2. READING THE ENCODER
1.2.3. DRIVING THE DC MOTOR
2. FILTERING
2.1. BACKGROUND
2.2. IN-LAB EXERCISES
3. STABILITY ANALYSIS
3.1. BACKGROUND
3.1.1. SERVO MODEL
3.1.2. STABILITY
3.2. IN-LAB EXERCISES
4. BUMP TEST MODELING
4.1. BACKGROUND
4.1.1. APPLYING THIS TO THE QUBE-SERVO
4.2. IN-LAB EXERCISES
5. FIRST PRINCIPLES MODELING
5.1. BACKGROUND
5.2. IN-LAB EXERCISES
6. SECOND-ORDER SYSTEMS
6.1. BACKGROUND
6.1.1. SECOND-ORDER STEP RESPONSE
6.1.2. PEAK TIME AND OVERSHOOT
6.1.3. UNITY FEEDBACK
6.2. IN-LAB EXERCISES
7. PD CONTROL
7.1. BACKGROUND
7.1.1. SERVO MODEL
7.1.2. PID CONTROL
7.1.3. PV POSITION CONTROL
7.2. IN-LAB EXERCISES
8. PENDULUM MOMENT OF INERTIA
8.1. BACKGROUND
8.2. IN-LAB EXERCISES
©2013 Intellectual property of Quanser. Do not reproduce without written permission.
QUANSER.COM +1-905-940-3575 INFO@QUANSER.COM
Page 2 of 8
COURSEWARE
SAMPLE QUBE™-Servo
9. ROTARY PENDULUM MODELING
9.1. BACKGROUND
9.2. IN-LAB EXERCISES
10. BALANCE CONTROL
10.1. BACKGROUND
10.2. IN-LAB EXERCISES
11. SWING-UP CONTROL
11.1. BACKGROUND
11.1.1. ENERGY CONTROL
11.1.2. HYBRID SWING-UP CONTROL
11.2. IN-LAB EXERCISES
11.2.1. ENERGY CONTROL
11.2.2. HYBRID SWING-UP CONTROL
12. OPTIMAL LQR CONTROL
12.1. BACKGROUND
12.2. IN-LAB EXERCISES
12.2.1. LQR CONTROL DESIGN
12.2.2. LQR-BASED BALANCE CONTROL
13. SYSTEM REQUIREMENTS
13.1. OVERVIEW OF FILES
13.2. USING THE SUPPLIED QUARC CONTROLLERS
13.3. SETUP FOR PENDULUM SWING-UP
APPENDIX A
INSTRUCTOR’S GUIDE
A.1
PRE-LAB QUESTIONS AND LAB EXPERIMENTS
A.1.1. HOW TO USE THE PRE-LAB QUESTIONS
A.1.2 HOW TO USE THE LABORATORY EXPERIMENTS
A.2
ASSESSMENT FOR ABET ACCREDITATION
A.2.1 ASSESSMENT IN YOUR COURSE
A.2.2 HOW TO SCORE THE PRE-LAB QUESTIONS
A.2.3 HOW TO SCORE THE LAB REPORT
A.2.4 ASSESSMENT OF THE OUTCOMES FOR THE COURSE
A.2.5 COURSE SCORE FOR OUTCOME A
A.2.6 COURSE SCORES FOR OUTCOMES B,K AND G
A.2.7 ASSESSMENT WORKBOOK
A.3
RUBRICS
REFERENCES
©2013 Intellectual property of Quanser. Do not reproduce without written permission.
QUANSER.COM +1-905-940-3575 INFO@QUANSER.COM
Page 3 of 8
COURSEWARE
SAMPLE QUBE™-Servo
3. BACKGROUND SECTION - SAMPLE
Bump Test Modeling
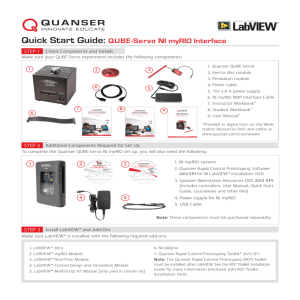
The bump test is a simple test based on the step response of a stable system. A step input is given to the
system and its response is recorded. As an example, consider a system given by the following transfer
function:
𝑌(𝑠)
𝑈(𝑠)
=
𝐾
𝜏𝑠+1
(4.1)
The step response shown in Figure 4.1 is generated using this transfer function with K = 5 rad/V-s and τ = 0.05 s.
Figure 4.1: Input and output signal used in the bump test method
The step input begins at time t0. The input signal has a minimum value of umin and a maximum value of umax.
The resulting output signal is initially at y0. Once the step is applied, the output tries to follow it and
eventually settles at its steady-state value yss. From the output and input signals, the steady-state gain is
∆𝑦
𝐾=
(4.2)
∆𝑢
where Δy = yss-y0 and Δu = umax-umin. In order to find the model time constant, τ, we can first calculate where
the output is supposed to be at the time constant from:
(4.3)
𝑦(𝑡1 ) = 0.632∆𝑦 + 𝑦𝑜
Then, we can read the time t1 that corresponds to y(t1) from the response data in Figure 4.1. From the figure
we can see that the time t1 is equal to:
𝑡1 = 𝑡𝑜 + 𝜏
From this, the model time constant can be found as:
𝜏 = 𝑡1 − 𝑡0
(4.4)
©2013 Intellectual property of Quanser. Do not reproduce without written permission.
QUANSER.COM +1-905-940-3575 INFO@QUANSER.COM
Page 4 of 8
COURSEWARE
SAMPLE QUBE™-Servo
4. IN-LAB EXERCISES
First Principle Modeling
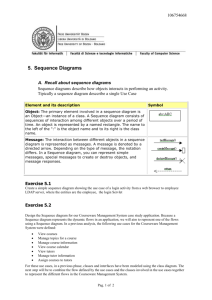
Based on the models already designed in QUBE-Servo Integration and Filtering labs, design a VI that applies a
1-3 V 0.4 Hz square wave to the motor and reads the servo velocity using the encoder as shown in Figure 5.2.
Figure 5.2: Applies a step voltage and displays measured and simulated QUBE-Servo speed.
Create subsystem called QUBE-Servo Model, as shown in Figure 5.2, that contains blocks to model the
QUBE-Servo system. Thus using the equations given above, assemble a simple block diagram in Simulink
to model the system. You'll need a few Gain blocks, a Subtract block, and an Integrator block (to go from
acceleration to speed). Part of the solution is shown in Figure 5.3.
Figure 5.3: Incomplete QUBE-Servo Model subsystem.
©2013 Intellectual property of Quanser. Do not reproduce without written permission.
QUANSER.COM +1-905-940-3575 INFO@QUANSER.COM
Page 5 of 8
COURSEWARE
SAMPLE QUBE™-Servo
It may also help to write a short Matlab script that sets the various system parameters in Matlab, so you
can use the symbol instead of entering the value numerically in the Gain blocks. In the example shown in
Figure 5.3, we are using Rm for motor resistance and kt for the current-torque constant. To define these,
write a script like:
% Resistance
Rm = 8.4;
% Current-torque (N-m/A)
kt = 0.042;
1.
A-1, A-2 The motor shaft of the QUBE-Servo is attached to a load hub and a disc load. Based on
the parameters given in Table 5.1, calculate the equivalent moment of inertia that is acting on the
motor shaft.
Answer 5.1
Outcome
Solution
A-1
From Figure 5.1, the total moment of inertia acting on the motor shaft is the sum of
the motor armature / rotor inertia, Jm, the hub inertia, Jh, and the disc inertia, Jd. The
equivalent moment of inertia is therefore
Jeq = Jm + Jh + Jd
(Ans. 5.1)
A-2
Given the disc moment of inertia in Equation 5.3 and the parameters defined in
Figure 5.1, the moment of inertia of the hub and disc load are:
1
Jh = md rh2
2
and
1
𝐽d = 𝑚𝑑 𝑟𝑑2
2
Using the parameters from Table 5.1, evaluate Ans.5.1 to obtain
𝐽𝑒𝑞 = 4.0 𝑥 10−6 +
1
1
0.0106(0.0111)2 + 0.053(0.0248)2 = 2.09 𝑥 10−5
2
2
□□□
©2013 Intellectual property of Quanser. Do not reproduce without written permission.
QUANSER.COM +1-905-940-3575 INFO@QUANSER.COM
Page 6 of 8
COURSEWARE
SAMPLE QUBE™-Servo
2.
K-3 Design the QUBE-Servo Model subsystem as described above. Attach a screen capture of your
model and the Matlab script (if you used one)..
Answer 5.2
Outcome Solution
K-3
The completed model is shown in Figure 5.4. The current depends on the angular rate of the
shaft and the applied voltage, as expressed in Equation 5.1. The acceleration of the shaft
equals the torque divided by the equivalent moment of inertia, as described in Equation 5.2.
The Matlab script used for this is:
Rm = 8.4;
kt = 0.042;
km = 0.042;
Jr = 4e-6;
mh = 0.0106;
rh = 22.2/1000/2;
Jh = 0.5*mh*rh^2;
md = 0.053;
rd = 49.5/1000/2;
Jd = 0.5*md*rd^2;
Jeq = Jr + Jh + Jd;
Figure 5.4: Completed QUBE-Servo Model subsystem.
©2013 Intellectual property of Quanser. Do not reproduce without written permission.
QUANSER.COM +1-905-940-3575 INFO@QUANSER.COM
Page 7 of 8
COURSEWARE
SAMPLE QUBE™-Servo
3.
□□□
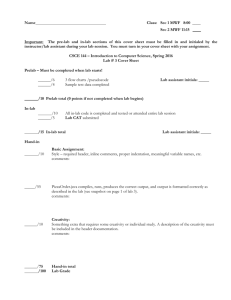
B-5, B-9 Build and run the QUARC controller with your QUBE-Servo model. The scope response
should be similar to Figure 5.5. Attach a screen capture of your scopes. Does your model represent the
QUBE-Servo well? Explain.
(a) Motor Speed
Figure 5.5: QUBE Response
(b) Motor Voltage
Answer 5.3
Outcome Solution
B-5
If the experimental procedure was followed correctly, the user should be able to run the
QUARC controller and obtain a response similar to Figure 5.5.
B-9
The model represents the actual QUBE-Servo system accurately because in the simulated
response (purple) matches the measured response (yellow) quite well in Figure 5.5.
□□□
©2013 Intellectual property of Quanser. Do not reproduce without written permission.
QUANSER.COM +1-905-940-3575 INFO@QUANSER.COM
Page 8 of 8
You Can Rely On Quanser
To Advance Control Education
For over two decades Quanser has focused solely on the development of
solutions for advanced control education and research. Today, over 2,500
University of Manchester • California Institute of Technology
Polytechnic School of Lausanne • Hong Kong University of Science
and Technology
universities,
colleges and research institutions around the world rely on a
University of Waterloo • Carnegie Mellon University
growing portfolio of Quanser control systems.
University of Toronto • Monash University • Kyoto University
University of Melbourne • ETH Zurich • Yale University
Our Rotary Control solutions offer quality, convenience, ease of use,
ongoing technical support and affordability. They are part of a wider range
f Alberta • Gifu University • Loughborough University
University of California, Berkeley • KTH • McMaster University of Quanser control lab solutions designed to enhance students’ academic
University Munich • Rice University • Kyoto Institute of Technology
experience. They come as complete workstations and can captivate
University of Auckland • MIT • Imperial College London
undergraduate and graduate students, motivate them to study further
The Chinese University of Hong Kong • Virginia Tech
and encourage them to innovate.
University of Houston • KAIST • Karlsruhe University
f Cincinnati • McGill University • Australian National University
Engineering educators worldwide agree that Quanser workstations are
reliable and robust. Choose from a variety of mechatronics experiments
King Soud University • I.I.T Kharagpur •Memorial University
University of British Columbia • Delft University of Technology and control design tools appropriate for teaching at all levels as well as
University of Texas at Austin • Beijing Institute of Technology advanced research. Take advantage of engineering expertise that includes
f Tokyo • Princeton University • Hebei University of Technologymechatronics, electronics, software development and control system design.
University of Wisconsin-Madison • Holon Institute of TechnologyLeverage the accompanying ABET-aligned courseware which have been
of Klagenfurt • Harvard University • Tokyo Institute of Technology
developed to the highest academic standards. Last but not least, rely on
University of Reading • Tsinghua University • Cornell University Quanser’s engineers for ongoing technical support as your teaching or
University of Michigan • Korea University • Queen’s University research requirements evolve over time.
University of Bristol • Purdue University • Osaka University
University of Stuttgart • Georgia Tech • Ben-Gurion University
University Eindhoven • Ajou University • Kobe University
University of Maryland College Park • Nanyang Technological University
University of New South Wales • Washington University in St.Louis
National University of Singapore • Harbin Institute of TechnologyLearn more at www.quanser.com or contact us at info@quanser.com
University of Victoria • Boston University • Donghua University
Northwestern University • Tongji University • Royal Military College
Follow us on:
University of Quebec • Clemson University • Fukuoka University
Adelaide University • University of Barcelona • SUNY
Queen’s University Belfast •Istanbul Technical University
ABET, Inc., is the recognized accreditor for college and university programs in applied science, computing, engineering,
e Los Andes • Louisiana Tech • Norwegian University of Science
and Technology
and technology. Among the most respected accreditation organizations in the U.S., ABET has provided leadership and
quality assurance in higher education for over 75 years.
United States Military Academy • CINVESTAV • Drexel University
MATLAB® and Simulink® are registered trademarks of the MathWorks, Inc.
Products and/or services pictured and referred to herein and their accompanying specifications may be subject
to change without notice. Products and/or services mentioned herein are trademarks or registered trademarks of
Quanser Inc. and/or its affiliates. MATLAB® and Simulink® are registered trademarks of The MathWorks Inc. Windows®
is a trademark of the Microsoft. Other product and company names mentioned herein are trademarks or registered
trademarks of their respective owners. ©2013 Quanser Inc. All rights reserved.
v2.2