2 Group Theory
advertisement

2
Group Theory
The theory of groups is a deep mathematical subject, one which will not receive a
comprehensive treatment here. The goal will be motivation and overview.
2.1 Groups
The question might first arise in elementary school. We learn of the laws of addition
and multiplication, and we see a pattern; there can exist “operations” which input two
numbers and output a third. The question attaches itself to the curious mind: what other
operations exist, or could exist? Certainly, we could invent operations to our hearts' content,
simply by assigning rules for combining numbers, tantamount to a multiplication table. If
we want to assign 5 # 6 = 53, we are free to do so. The more nuanced question becomes:
which operations are useful, or interesting? Are addition and multiplication chosen because
they are the only interesting and useful operations, or are they simply the most interesting
and useful? How do we define what is useful to us?
Notice that the idea of composing two things to get a new thing isn't a concept
devoted simply to numbers. For example, when we compose two rotations (by performing
both in succession), the combination is a rotation. When we compose functions, the result
is a function. When we multiply matrices, the result is a matrix. In the realm of physics, if a
physical state or theory has a set of symmetries, we can compose two symmetries, and the
result will be a symmetry. This question has a wide scope of answers.
First, we abstract the problem to the realm of set theory. In this language, we study
what is known as a law of composition. A law of composition is a map which combines two
elements from a set to produce another element of the set:
(2.1)
f : S ×S S
s1, s 2 ⇢ s1 ° s 2= s 3 ∈S
(2.2)
Thus, a law of composition has the property of closure; when we combine two elements from
the set S, we remain in the set S. However, it is still a notion fairly devoid of structure. With
such an unrestricted definition, it seems unlikely we have yet produced something useful.
For example, let us invent a new operation, which we shall call the “turns into” operation,
denoted “ti>”. The “turns into” operation will be defined as follows:
(2.3)
a ti> b=b , for all b∈ S
This is a bona fide law of composition, which is well-defined on any set S. The
multiplication table would be quite simple to produce:
ti> a b c ⋯
a a b c ⋯
(2.4)
b a b c ⋯
c a b c ⋯
⋮ ⋮ ⋮ ⋮ ⋱
As you can see, this composition law is a bit stubborn; it doesn't matter at all what
the first element is. Eventually, we want the objects of study to actually be “compositions”,
that is, we want the composed element “a ti> b” to somehow retain some of the information
about how it is composed. For the case of the “turns into” operation, this is not possible.
This will not be a satisfactory operation to be placed under the category of “group”.
Examples
Before we seek a formal definition, it is worthwhile to provide some useful examples
for context and motivation. Later, when we have developed the definition, we will show that
all of these examples indeed satisfy the group axioms.
We start with the real numbers, with two possible composition laws: addition or
multiplication. In the case of multiplication, it turns out that we need to restrict ourselves
to the real numbers with zero removed: R* = R\{0}. We can sometimes form groups out of
closed subsets of these spaces. For example, the positive real numbers R⁺ also form a group
under multiplication, and the integers Z form a group under addition.
We can even go further, looking at the group of integers modulo n. Given an integer
n, any integer m can be written in the form
(2.5)
m=anb , where0bn
In simpler language, b is the remainder when m is divided by n. We write
m≡b mod n
(2.6)
meaning m and b are separated by a multiple of n. The set of integers modulo n contains n
elements, in that there are n possible remainders when dividing by n. Note that they can
add; it works exactly like addition in the integers, except that it wraps around at n:
n≡0 mod n
(2.7)
Because addition on this set is cyclic, this group is known as the cyclic group of order n. It
is denoted Zn.
Problem 2.1 Show that addition of integers is preserved when looking at integers modulo n:
ab=c ⇒ ab≡c mod n
(2.8)
also, show that multiplication is preserved:
a⋅b=c ⇒ a⋅b≡c mod n
(2.9)
Problem 2.2 Given the results of Problem 2.1, we look at a specific example:
10≡1 mod 3
(2.10)
meaning
10⋅a≡a mod 3
(2.11)
and
m
10 ≡1 mod 3
(2.12)
Use these facts to show that a number is divisible by three if and only if the sum of its digits is
divisible by three.
The symmetric group, Sn, is the set of permutations of n elements. We can compose
permutations in the natural way;
s3 =s2 ° s1
(2.13)
is the permutation found by performing the permutation s₁ followed by s₂. As an example
of a permutation group, the group S₃ might represent the six possible ways of rearranging
three playing cards.
The symmetric group is our first example of a group whose multiplication law is not
commutative. The order of permutations is important:
s 2 ° s 1≠s1 ° s 2
(2.14)
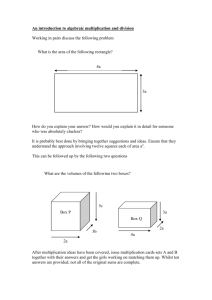
Figure 2.1 The symmetric group is not abelian; the order of permutations matters.
For example, if we have three playing cards, placed in the order J-Q-K, and we perform a
cyclic permutation leading to K-J-Q, then switch the first two cards, we have J-K-Q. If we
instead were to switch the first two cards first, Q-J-K, then perform the cyclic permutation,
we have K-Q-J, not J-K-Q. A group whose multiplication law commutes, so that the order
doesn't matter, is called “abelian”. The symmetric group is not abelian, for n > 2.
Often times, we can define a group as “the set of symmetries of ____”. For example,
the Klein Four group is the set of symmetries of a rectangle. There are two reflections and
one 180° rotation which compose this group. The dihedral group Dn is the set of
symmetries of a regular n-gon. There always exist n rotations and n reflections which map
the n-gon to itself.
Groups can also simply be specified by a multiplication table. For example, there is
the quaternion group H given by the eight elements {±1, ±i, ±j, ±k}, with the rules
2
2
2
(2.15)
i = j =k =−1
i⋅ j=− j⋅i =k
(2.16)
j⋅k =−k⋅ j =i
k⋅i =−i⋅k = j
these rules give us the following multiplication table:
1 −1 i −i
j −j
k −k
1
1 −1 i
−i
j − j k −k
−1
−1 1 −i
i −j
j −k k
i
i −i −1 1
k −k − j
j
−i
−i
i
1 −1 −k k
j −j
j
j − j −k k −1 1
i
−i
−j
−j
j
k −k 1 −1 −i
i
k
k −k
j − j −i
i −1 1
−k
−k k − j
j
i −i 1 −1
Clearly, the quaternions are another example of a nonabelian group.
(2.17)
Matrix multiplication provides another group multiplication law. Specifically, the set
of all invertible n × n matrices is a group, which we call the general linear group, GLnR.
There are many subsets of GLnR which are also groups by themselves.
As was hinted at previously, the set of spatial rotations and reflections (about a given
point) forms a group, On, the set of rotations and reflections in n dimensions. In addition,
there is Tn, the group of translations in n dimensions. It is possible to combine these
groups, since the composition of a rotation with a translation is just the same rotation with
its point of origin translated. This is known as the group of rigid transformations in n
dimensions. It includes all spatial translations, and all rotations about all points.
For an abstract example of a group, think of the set of bijective maps from a set to
itself. The composition law is just given by composition of maps:
h x = f ° g x= f g x
(2.18)
Group Axioms
When we formulate the theory of groups, we will need additional structure that
reflects our need to retain information about how an element is constructed out of other
elements. When we compose two elements a · b = c, it should be possible to “re-separate”
the element c into the combination “a · b”. For example, we can separate a translation of ndimensional space into a series of n consecutive translations, one along each dimension. We
can also separate any permutation into a series of two-element swaps. It is this concept
which will motivate additional restrictions added to a set with a law of composition, making
it worthy of being what we call a group.
The property of being able to rewrite an element as a combination of constituent
elements is primarily encapsulated in the notion of associativity. Say we take a combination
of two elements, and wish to compose it with another element. We write this as
a⋅b⋅c
(2.19)
To rewrite this in a form which highlights the fact that the single element (a · b) is a
combination of two elements, a and b, we drop the parentheses, which will give us the same
result, assuming the multiplication is carried out left to right:
a⋅b⋅c
(2.20)
We now turn this purely aesthetic transformation into a mathematical one, by considering
the composition of b with c, now that b has been separated from a. What we arrive at is the
associative law,
a⋅b⋅c=a⋅b⋅c=a⋅b⋅c
(2.21)
The associative law is essentially the notion that the parentheses are unnecessary; that the
element created by composing b with c multiplies with a in the same way as if the
constituent elements are multiplied with a. The associative law ensures we can always
choose whether we want to regard (a · b) as a single element, or the combination of two
separate elements.
The next axiom continues to reflect the fact that we should be able to recover the
combination of constituent elements which compose an element. It is the requirement that
the composition law be invertible. For every element x, there must exist an inverse element,
x⁻¹, such that
(2.22)
a⋅x⋅x −1=a
for every element a in the group. For example, addition has negatives, and multiplication
has reciprocals. Rotations can also be inverted easily, simply by rotating in the other
direction. This is the strongest restriction that groups are required to satisfy. With this
axiom, we can use group multiplication to recover individual elements from a composite
element. Notice that our associativity law immediately allows us to rewrite this:
−1
(2.23)
a⋅ x⋅x =a⋅e=a
where “e” is a special element, which we call the identity element. We have already shown
that whenever it is composed with an element, the result is simply the element it was
composed with. In the translation group, it is the translation of zero distance. In the group
of invertible maps, it is simply the identity map.
Problem 2.3 Given the axioms of associativity and invertibility, show that there exists only
one identity element for a given group. In other words, if e and f are identity elements of the
same group, show that e = f.
These two axioms transform a law of composition into a group. Usually, the group
axioms are represented in a slightly different way, as follows. A group is a set G along with a
law of composition, under which the following three group axioms hold:
•
•
•
Associativity:
a⋅ b⋅c =a⋅b⋅c=a⋅b⋅c , a , b , c ∈G
The existence of an identity element:
∃e∈G : e⋅g =g⋅e=g , for all g ∈G
The existence of inverses:
−1
−1
−1
∃ g for every g ∈G : g ⋅g=g⋅g =e
(2.24)
(2.25)
(2.26)
This will be the definition we use for a group. The exponential notation used for the inverse
will also be extended to repeated compositions of g with itself:
k
g =g⋅g⋅... ,
−k
−1
−1
g =g ⋅g ⋅...
(2.27)
Problem 2.4 Show that the “turns into” operation is associative, but not invertible.
Problem 2.5 Show that the following are groups. That is, show that the following operations
satisfy closure along with the three group axioms: The real numbers under addition and
multiplication, the positive reals under multiplication, the cyclic group Zn, the symmetric group
Sn, the dihedral group Dn, the klein four group, the quaternions, the general linear group
GL nR, the rotation/reflection group, the translation group, the group of rigid motions, and the
group of bijective maps.
2.2 Extracting Groups out of Groups
Once we have identified a group, there are many related groups which are interesting
and useful to study. This will be a recurring theme in the group theory story; studying a
group inevitably involves studying many related groups, which give a great deal of insight
into the original group.
Subgroups
The concept of a subgroup is fairly straightforward: a subgroup H of a group G is a
subset of G whose elements form a group under G's multiplication law. Every subgroup
must, of course, contain the identity element. Breaking down a group into its subgroups
helps us to learn more about its multiplicative structure. We can find subgroups by a variety
of methods.
For an arbitrary group, there exists two trivial subgroups we can always identify: the
subgroup consisting of only the identity, {e}, and the subgroup consisting of the entire
group, G. These subgroups don't tell us anything new about G itself.
For any element g
G, we can find the subgroup of G generated by g. We get all
elements of this subgroup by repeated multiplication by g or g-¹. In other words, this is the
subgroup {gk} for all k. If there exists an integer k such that gk = e, then this subgroup has
exactly k elements (assuming k is the smallest number for which this is true). Otherwise, the
subgroup has an infinite number of elements, and it will indeed need to use all possible
integer values of k. This subgroup is denoted <g>. We can also generate subgroups from
any number of group elements, by performing all possible multiplicative combinations.
Problem 2.6 In any group G, the set of elements which commute with every other element is
known as the center of the group, and is denoted Z. Show that Z is a subgroup of G.
Product Groups
We can form a group as a composition of two smaller groups,
H =G 1×G2
Such a group can be represented by the set of ordered pairs
h= g 1, g 2
Where the multiplication structure is given by that of the constituent groups:
a1, a2 ⋅ b1, b 2=a1⋅b1, a 2⋅b 2
(2.28)
(2.29)
(2.30)
Problem 2.7 Given the multiplication law (2.30), show that the product of two groups is itself
a group.
2.3 Morphisms
According to the definition of a group, we need a set G and a law of composition
defined on that set. The definition doesn't care what G is a set of. It could be the set of
vertices on a dodecahedron or the set of cigarettes in a pack. It doesn't matter what these
objects are pointing to; all that matters is their relationship with respect to the
multiplication law defined on G. That being said, if we find two groups which are defined
by two different sets with the same law of composition, we do not want to think of them as
distinct groups. For this reason, we define an isomorphism:
Two groups G and H are said to be isomorphic when there exists a bijective map
between them which preserves the multiplicative structure. The bijective map φ: G → H
provides a dictionary between points in the set G and points in H. The requirement that the
group structure be preserved is enforced by the following equation:
g 1⋅g 2 = g 1 ⋅ g 2
(2.31)
Isomorphism between G and H is signified like so:
(2.32)
G⋲ H
Problem 2.8 Show that the additive structure of the real numbers and the multiplicative
structure of the positive reals are isomorphic, i.e. find a bijective map φ: R → (0,∞) such that
x y = x× y
(2.33)
Problem 2.9 Show that any subgroup of a group G which is generated by a single element
is either isomorphic to the integers or to a cyclic group.
⟨ g ⟩⋲Z or Z n
(2.34)
Problem 2.10 Show that the real numbers under multiplication are isomorphic to the product
of the positive reals with the 2-element cyclic group
*
R ⋲0,∞⊗Z 2
(2.35)
Isomorphism between groups is a powerful mathematical statement, but perhaps
more useful is the notion of a homomorphism. Two groups are said to be homomorphic
when there exists any map φ: G → H which preserves the multiplicative structure. φ is not
required to be injective or surjective, but it is still required to satisfy (2.31). An isomorphism
is then a special case of a homomorphism.
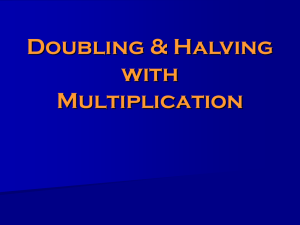
Figure 2.2 A homomorphism preserves the multiplicative structure, but not the size of the group.
In addition to the groups G and H between which φ acts, the homomorphism reveals
two additional groups: the image and the kernel. The image is the subgroup in H which φ
maps to. Since φ is not necessarily surjective, it may only map to a subset of H. The image
of φ turns out to be a group, and is denoted
(2.36)
Im = G⊂H
The kernel is the subset in G which is the preimage of the identity in H. In other words, it
is all the group elements in G which map to H's identity element.
(2.37)
Ker =−1 e={g ∈G∣ g =e}⊂G
Problem 2.11 Show that the image of a homomorphism is a subgroup of the range and the
kernel is a subgroup of the domain.
Problem 2.12 Show that a homomorphism is surjective if and only if its image is the range H,
and it is injective if and only if its kernel is the trivial group consisting only of the identity in G.
Problem 2.13 Show that the determinant map is a homomorphism
det : GLn R R
*
(2.38)
What is its kernel?
There is a one-to-one correspondence between elements of the kernel and elements
of G which map to a given point h in the image. For, if
(2.39)
g =h
Then for every other element which maps to h H,
−1
(2.40)
g ' =h , g ' =g '⋅g ⋅g=k⋅g
Problem 2.14 Show that k
Kerφ in (2.40).
Similarly, if
g ' =k⋅g , where k ∈ Ker
then
g ' = k ⋅ g=e⋅h=h
Figure 2.3 A homomorphism maps cosets to points.
(2.41)
(2.42)
If the kernel of φ has n elements, then the map φ is an n-to-one correspondence.
For every element h in the image, there exist n elements that map to h. In this way, the
kernel evenly divides G into subsets characterized by g · K = {g · k | k K} where g G and
K is the kernel of φ. Such subsets are known as cosets of G. All the elements in each coset
map to a single point h H.
Figure 2.4 Cosets evenly partition the group.
Automorphisms and Conjugation
The act of conjugating a group element g by h is fairly straightforward:
−1
(2.43)
Conj h g =h⋅g⋅h
One thing useful about conjugated elements is that they multiply in the same way after
being conjugated:
−1
−1
−1
−1
−1
(2.44)
h⋅g 1⋅h ⋅ h⋅g 2⋅h =h⋅g 1⋅h ⋅h⋅g 2⋅h =h⋅ g 1⋅g 2⋅h
Conjugating a group by h does not change the group structure.
(2.45)
h⋅G⋅h−1⋲G
Of course, if h G, then every conjugated element must also be a member of G, although
not necessarily the same member. So, we have established an isomorphism from G to itself,
which is not necessarily the identity map. Such an isomorphism is called an automorphism.
Problem 2.15 Show that the set of automorphisms of G is itself a group, which we call Aut G.
We have shown that conjugation by a given element is always an automorphism. Thus, the
set of all conjugations is a subgroup of Aut G. Since each conjugation is specified by an
element of G, there is a natural map from G to Aut G. First show that this map is a
homomorphism whose image is the set of conjugations. What is its kernel?
What if h is not necessarily an element of G? That is, imagine G is actually a
subgroup of a larger group, in which h is contained. Do we get an automorphism in this
case? Generally, we do not, but there exist special subgroups known as normal subgroups,
for which conjugation by any element of the larger group is an automorphism:
−1
(2.46)
N ⊂ H , h⋅N⋅h = N , for h∈ H
Problem 2.16 Show that the kernel of a homomorphism is always a normal subgroup of the
domain.
2.4 Quotient Groups
Problem 2.16 tells us something useful about homomorphisms and normal
subgroups. In fact, we can now show that given a group G with a normal subgroup N, we
can always generate a homomorphism whose kernel is N. The group to which this
homomorphism maps is known as the quotient group G/N.
The quotient group can be directly represented by the collection of all cosets of G.
G/ N ⋲{g⋅N∣g ∈G}
(2.47)
The homomorphism is straightforward:
: G G / N
(2.48)
g ⇢ g⋅N
The multiplication law is given by multiplication of cosets:
g 1⋅N ⋅ g 2⋅N =g 1⋅N⋅g 2⋅N ={g 1⋅n1⋅g 2⋅n2∣n1, n 2∈N }
(2.49)
Figure 2.5 The quotient group is the group of cosets.
Problem 2.17 Show that this is indeed a homomorphism, in that it preserves the multiplication
law of G. That is, show
g 1⋅N ⋅ g 2⋅N = g 1⋅g 2 ⋅N
(2.50)
whenever N is a normal subgroup of G.
The normal subgroup allows us to partition G evenly into cosets, and form a new
group by mapping each coset into a point. This partition can be thought of as an
equivalence relation; any two elements in the same coset are related by an element of the
normal subgroup.
g 1~ g 2 ⇔ g 1 , g 2 ∈ a⋅N ⇔ g 1=g 2⋅n , n∈ N
(2.51)
In the quotient group, the similarity symbol (⁓) is replaced by equality, since cosets get
mapped to single points.
Problem 2.18 Show that the second part of (2.51) is true; that two elements being in the
same coset implies that they are related by an element of the normal subgroup, and vice
versa.
Problem 2.19 Consider the additive group of integers Z, which contains a subgroup
generated by a given integer n. <n> is the additive group of multiples of n. Since Z is
abelian, all of its subgroups are normal. Show that the quotient group of the integers by this
subgroup is isomorphic to the cyclic subgroup of order n:
Z / ⟨ n ⟩⋲ Z n
(2.52)
Problem 2.20 Given the dihedral group Dn of symmetries of the n-gon (rotations and
reflections), first show that the subgroup of all rotational symmetries (omitting reflections) is a
normal subgroup of Dn (note also that this subgroup is a cyclic group). Then show that the
quotient group is isomorphic to the two-element group of the identity and a single reflection.
Dn / Z n⋲Z 2
(2.53)
Problem 2.21 Given the product group G × H, first show that H is a normal subgroup, as it is
isomorphic to the set of ordered pairs (e,h) where e is the identity in G, and h H. Then
show that
G× H / H ⋲G
(2.54)
2.5 Group Action on a Set
We've spent some time looking at the symmetric group Sn, calling it the set of
permutations of n “objects”. The objects being permuted are unnecessary to the group
structure; it's merely a convenient way of expressing the symmetric group. Likewise, the
dihedral group Dn is a set of “transformations” of the n-gon, but we don't need the n-gon to
describe the multiplication law. These are two examples of the general concept of a group
acting on a set. The symmetric group acts on a set of n elements. The dihedral group can
be thought to act on the n vertices, or the n sides of the polygon (you could also have it act
on the diagonals, or many other geometric objects relating to the n-gon, if you like). The
action of a group on a set can give us insight into the group's structure. For example, each
element of the dihedral group gives a unique permutation of the n vertices of an n-gon, but
it doesn't cover all possible permutations. This demonstrates that the dihedral group is a
subgroup of the symmetric group:
Dn ⊂ S n
(2.55)
Let's lay out the foundation of group action on a set more formally before we
proceed. Given a group G and a set S, we specify the group action of G on S (with a slight
abuse of notation)
G×S S
(2.56)
g , s ⇢ g⋅s
with the following requirements:
g 1⋅ g 2⋅s = g 1⋅g 2 ⋅s
(2.57)
(2.58)
e⋅s=s
It is possible to regard this action as a map from G to a set of permutations of the elements
of S.
G P[ S]
(2.59)
A group is said to act “faithfully” on a set if if this map is one-to-one, that is, if
g 1⋅s≠g 2⋅s whenever g 1 ≠g 2
(2.60)
If a group G acts faithfully on a set S, this means that each element of G is associated with a
unique rearrangement of the elements of S. A group can always act on itself by left
multiplication, or by conjugation.
Problem 2.22 Show that left multiplication is a faithful group action on itself.
Problem 2.23 For each of the following groups, find a set (other than the group itself) on
which the group acts faithfully: The cyclic group Zn, the klein four group, the general linear
group GL nR, the rotation/reflection group, the translation group, and the group of bijective
maps.
Problem 2.24 Note that many groups are defined by their faithful action on a set (such is the
case with most of the groups in problem 2.23). Faithful action on a set helps us to gain insight
into conjugation. Show that when we conjugate a permutation P by another permutation Q,
the resulting permutation is given by taking P's action on n elements, and permuting the action
itself. That is, if P is a cyclic permutation of elements 1→2→3→1, and Q trades elements 1
and 2, then the conjugation of P by Q is a cyclic permutation of elements 2→1→3→2.
Describe how this extends to other groups defined by faithful action on a set, like rotations.
2.6 Fields and Algebras
It is possible for a set to be considered a group under two distinct composition laws.
For example, the real numbers have addition and multiplication. For this reason, the real
numbers are known as a field. Specifically, a field is a set which has two composition laws,
denoted “+” and “·”. The former we generally call “addition”, and it is required to be
abelian. The latter is usually called “multiplication”, and strictly speaking, the set is not
formally a group under multiplication. In the case of the real numbers, it is actually the set
R\{0} which is a group under multiplication. We will find that in general we need to remove
the additive identity element to consider a field as a group under multiplication. The final
requirement has to do with compatibility between the two operations. Multiplication and
addition are required to satisfy the distributive law:
a⋅ bc=a⋅ba⋅c
(2.61)
Fields are highly structured objects. So structured, in fact, that the scope of fields is
not nearly as vast or as varied as that of groups. It will be interesting and useful for us to
study objects with the flavor of fields, but less mathematical structure. With this in mind, we
look at what happens when we relax the group axioms (2.24 - 2.26). When a group has two
composition laws, one of which is an abelian group, and the other satisfies all group axioms
except for invertibility, and the two operations satisfy the distributive law (2.61), the set is
known as a ring. It will often be the case that we want to study even more general objects,
which satisfy fewer group axioms. We usually refer to these objects using the more general
term “algebra”.
Problem 2.25 Show that the integers mod p, Zp, satisfy the conditions to be a field.
Problem 2.26 Show that the rational numbers Q are a field.
Problem 2.27 Show that the following satisfy the conditions to be a ring: The integers Z, the
integers modulo n (Zn), the set of all n × n matrices, and the Gaussian Integers {a + bi, where
a, b Z}
Problem 2.28 Define the quaternion ring, by starting with the quaternion group (2.17) and
allowing linear combinations:
H ={ab i c jd k∣a , b , c , d ∈R}
Show that this satisfies the conditions to be a ring.
(2.62)