Sinusoids and Phasors
advertisement

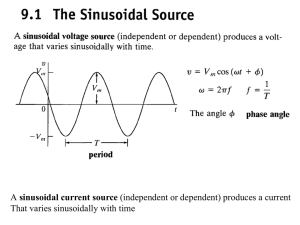
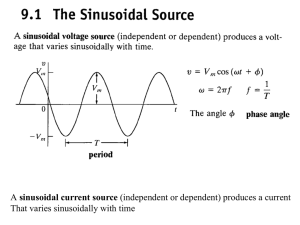
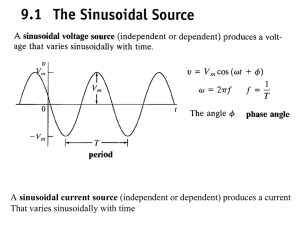
2012/11/13 Sinusoids and Phasors •Introduction •Sinusoids •Phasors •Phasor Relationships for Circuit Elements •Impedance and Admittance •Ki r c hhof f ’ sLa wsi nt heFr e que nc yDoma i n •Impedance Combinations •Applications Introduction •AC is more efficient and economical to transmit power over long distance. (Transformer is the key.) •A sinusoid is a signal that has the form of the sine or cosine function. •Circuits driven by sinusoidal current or voltage sources are called ac circuits. •Why sinusoid is important in circuit analysis? –Nature itself is characteristically sinusoidal. –A sinusoidal signal is easy to generate and transmit. –Easy to handle mathematically. 1 2012/11/13 Sinusoids Consider the sinusoidal voltage v(t nT ) v(t ) v (t ) Vm sin t where Proof : Vm the amplitude of the sinusoid v(t nT ) Vm sin (t nT ) the angular frequency (radians/s ) 2 Vm sin (t n ) ω t the argument of the sinusoid ω Vm sin(t 2n) The sinusoid repeats itself every T seconds. v(t ) 2 ωT2 T (T:period ) ω Sinusoids (Cont ’ d) •A periodic function is one that satisfies f(t) = f(t+nT), for all t and for all integers n. –The period T is the number of seconds per cycle. –The cyclic frequency f = 1/T is the number of cycles per second. 1 f T 2f where : radians per second (rad/s) f : hertz (Hz) A more general expression is given as v(t ) Vm sin(t ) where (t ) : Argument : Phase 2 2012/11/13 Sinusoids (Cont ’ d) We say that We say that v2 leads v1 by v1 lags v2 by v1 and v2 are in phase, if 0 v1 and v2 are out of phase, if 0 Sinusoids (Cont ’ d) •To compare sinusoids. –Use the trigonometric identities. –Use the graphical approach. Trigonometric identities : sin( A B) sin A cos B cos A sin B cos( A B) cos A cos B sin A sin B ) sin t sin(t 180 cos(t 180 ) cos t ) cos t sin(t 90 ) sin t cos(t 90 3 2012/11/13 The Graphical Approach A cos t B sin t C cos(t ) A C cos θ ,B C sin θ C A2 B 2 where B tan 1 A 3 cos t 4 sin t 5 cos(t 53.1 ) Phasors •Sinusoids are easily expressed by using phasors •A phasor is a complex number that represents the amplitude and the phase of a sinusoid. •Phasors provide a simple means of analyzing linear circuits excited by sinusoidal sources. 4 2012/11/13 Phasors (Cont ’ d) Three ways to represent a complex number z : x jy : Rectangular form z r : Polar form , where re j : Exponential form r : magnitude of z : phase of z Given x and y, we can get r and as y r x 2 y 2 , tan 1 x If we know r and , we can obtain x and y as x r cos , y r sin y r z x z x jy rr (cos j sin ) re j Important Mathematical Properties z x jy rre j j 1 z1 x1 jy1 r1 1 r1e z 2 x2 jy2 r2 2 r2 e j2 Addition : z1 z2 ( x1 x2 ) j ( y1 y2 ) Substraction : z1 z 2 ( x1 x2 ) j ( y1 y2 ) Multiplica tion : z1 z2 ( x1 jy1 )( x2 jy 2 ) ( x1 x2 y1 y2 ) j ( x1 y2 x2 y1 ) r1e j1 r2 e j2 r1r2 e j (1 2 ) r1r2 ( 2 ) 1 5 2012/11/13 Important Mathematical Properties z1 x1 jy1 ( x1 jy1 )( x2 jy2 ) z2 x2 jy2 ( x2 jy 2 )( x2 jy2 ) Division : x x y y x y x y 1 22 12 2 j 2 21 12 2 x2 y2 x2 y2 r e j1 r r 1 j2 1 e j (1 2 ) 1 ( 2 ) 1 r2 e r2 r2 Reciprocal : Square Root : 1 1 z r z r 2 Complex Conjugate : z x jy r Phasor Representation e j cos j sin cos Re(e j) j sin Im(e ) v(t ) Vm cos(t ) Re(Vm e j (t ) ) Re(Vm e je jt ) v(t ) Re( Ve jt ) V Vm e j Vm V is the phasor representation of the sinusoid v(t ). 6 2012/11/13 Phasor Representation (Cont ’ d) Phasor Diagram V Vm I I m 7 2012/11/13 Sinusoid-Phasor Transformation v(t ) Vm cos(t ) Re(Ve jt ) where V Vm e j Vm dv(t ) Vm sin(t ) Vm cos(t 90 ) dt Re(Vm e jt e je j 90) Re e j 90(Vm e j)e jt Re( jVe jt ) Re(V e ) jt Finally we have Sinusoids v(t ) Vm cos(t ) Phasors V Vm dv Vm cos(t 90 ) jV Vm (90 ) dt V V Vm vdt m cos(t 90 ) (90 ) j Phasor Relationship for Resistor If the current through the resistor is i I m cos(t ) I I m By Ohm' s law, v iR RI m cos(t ) V RI m RI Time domain Phasor domain Phasor diagram 8 2012/11/13 Phasor Relationship for Inductor If the current through the inductor is i I m cos(t ) I I m The voltage across the inductor is di v L LI m cos(t 90 ) V jLI dt Time domain Phasor domain Phasor diagram Phasor Relationship for Capacitor If the voltage across the capacitor is v Vm cos(t ) V Vm The current through the capacitor is i C dv CVm cos(t 90 ) I jCV dt Time domain Phasor domain Phasor diagram 9 2012/11/13 Impedance and Admittance V 1 Impedance : Z () , Admittance : Y (S) I Z V is the phasor voltage where I is the phasor current Element Impedance Admittance 1 R Z R Y R 1 L Z jL Y jL 1 C Z Y jC jC Impedance and Admittance (Cont ’ d) Z jL 0 Z 1 jC 0 10 2012/11/13 Impedance and Admittance (Cont ’ d) Z R jX R : resistance where X : reactance The impedance is said to be inductive when X is positive capacitive when X is negative Z R jX Z Z R 2 X 2 where 1 X tan R R Z cos and X Z sin If X is positive, then Z R jX : inductive or lagging since current lags voltage Z R jX : capacitive or leading since current leads voltage Impedance and Admittance (Cont ’ d) 1 Y G jB Z G : conductance where B : susceptance 1 1 R jX R jX G jB 2 R jX R jX R jX R X 2 R G 2 2 R X X B 2 R X 2 11 2012/11/13 KVL and KCL in the Phasor Domain For KVL, let v1 , v2 ,..., vn , be the voltages around a closed loop. v1 v2 vn 0 In the sinusoidal steady state, each voltage may be written in cosine form. Vm1 cos(t 1 ) Vm 2 cos(t 2 ) Vmn cos(t n ) 0 This can be rewritten as Re(Vm1e j1 e jt ) Re(Vm 2 e j2 e jt ) Re(Vmn e jn e jt ) 0 Vm1e j1 Vm 2 e j2 jt Re e 0 jn V e mn for any t KVL and KCL (Cont ’ d) Let Vk Vmk e jk , then Re Ve Re V1 V2 Vn e jt Re VT e jt T j (t T ) V T cos(t T ) 0 where VT VT e jT V1 V2 Vn 1 Possible (1) cos(t T ) () T ) 0 t ( 2 k solutions (2) VT 0 () V1 V2 Vn VT e jT 0 (KVL holds for phasor.) In a similar manner, KCL holds for phasor. I1 I 2 I n 0 12 2012/11/13 Series-Connected Impedance Applying KVL gives V V1 V2 Vn I (Z1 Z 2 Z n ) V Z eq Z1 Z 2 Z n I V Z I , Vk k V Z eq Z eq Parallel-Connected Impedance Applying KCL gives I I1 I 2 I n I Yeq Y1 Y2 Yn V 1 1 1 I Y V ( ) V , Ik k I Z1 Z 2 Zn Yeq Yeq 13 2012/11/13 Y-Transformations Y Δ Co n v e r s ion: ΔY Conversion: Z Z Z 2 Z 3 Z 3 Z1 Za 1 2 Z1 Zb Zc Z1 Z a Z b Z c Z Z Z 2 Z 3 Z 3Z1 Zb 1 2 Z2 ZcZa Z2 Z a Z b Z c Z Z Z 2 Z 3 Z 3Z1 Zc 1 2 Z3 Z a Zb Z3 Z a Z b Z c Example 1 Find Z in for 50 rad/s. Z in Z 2 mF Z 310 mF || Z 80.2 H 1 1 3 8 j 0.2 || j 2m j 10 m j10 3 j 2 || 8 j10 3 j 2 8 j10 3.22 j11.07 j10 11 j8 14 2012/11/13 Example 2 Find vo (t). Sol: vs 20 cos(4t 15 ) Vs 2015, 4 j 20 || j 25 Vo Vs 60 j 20 || j 25 j100 2015 60 j100 0.857530.96 2015 17.1515.96 vo (t ) 17.15 cos(4t 15.96 ) Example 3 Sol: j 4(2 j 4) j 4 2 j 4 8 1.6 j 0.8 j 4(8) Z bn j 3.2 10 8(2 j 4) Z cn 1.6 j 3.2 10 Z 12 Z an Z an Find I. -Y transformation Z bn j 3 || Z cn j 6 8 13.6 j1 13.644.204 V 500 I Z 13.644.204 3.6664.204 15 2012/11/13 Applications: Phase Shifters R jRC Vo Vi Vi 1 1 jRC R jC jRC (1 jRC ) RC (RC j1) Vi Vi 2 2 2 1 R C 1 2 R 2C 2 RC 1 tan 1 Vi 2 2 2 RC 1 R C Output leads input. Phase Shifters (Cont ’ d) 1 1 1 jRC jC Vo Vi Vi Vi 1 1 jRC 1 2 R 2C 2 R jC 1 tan 1 RC Vi 2 2 2 1 R C Output lags input. 16 2012/11/13 Example Design an RC circuit to provide a phase of 90leading. Sol: 20(20 j 20) Z 20 || (20 j 20) 12 j 4 40 j 20 2 Z 12 j 4 V1 Vi Vi 45 Vi Z j 20 12 j 24 3 2 2 2 1 20 45 Vo V1 45 V1 45 Vi 90 20 j 20 2 2 3 3 Applications: AC Bridges Balanced condition : V1 V2 Z2 Zx V1 Vs V2 Vs Z1 Z 2 Z 3 Z x Z2 Zx Z Z 2 Z 3 Z1Z x Z x 3 Z 2 Z1 Z 2 Z 3 Z x Z1 17 2012/11/13 AC Bridges (Cont ’ d) Bridge for measuring L Bridge for measuring C R1 jLx R2 jLs R1 jC x R2 jCs R Lx 2 Ls R1 R C x 1 Cs R2 Summary •Transformation between sinusoid and phasor is given as v(t ) Vm cos(t ) V Vm •Impedance Z for R, L, and C are given as Z R R, Z L jL, Z C 1 jC •Basic circuit laws apply to ac circuits in the same manner as they do for dc circuits. 18