New Trends in the Use of Robotic Devices in Motor
advertisement

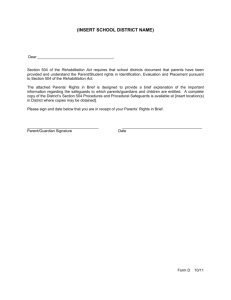
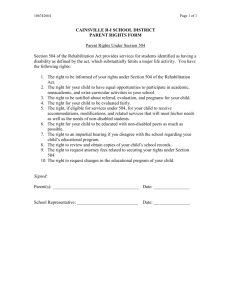
New Trends in the Use of Robotic Devices in Motor Rehabilitation of Upper Limbs Marcin Bonikowski1 Mikulas Hajduk2, Lucia Koukolova2, Wojciech J. Klimasara3, Patrycja Mrozek1, Zbigniew Pilat3 1 Mazovian Neuropsychiatry Center, Zagórze n. Warsaw, Poland (martinbonikowski@gmail.com, mrozek.patrycja@gmail.com) 2 Technical University of Košice, Kosice, Slovakia (mikulas.hajduk, lucia.koukolova)@tuke.sk 3 Industrial Research Institute for Automation and Measurements PIAP, Warsaw, Poland (wklimasara, zpilat@piap.pl) Abstract. In the years to come, robotic systems assisting physical rehabilitation will be used mainly by elderly, disabled, as well as children and adults after accidents and disorders limiting their physical capabilities. As the population is getting older, the issue becomes more and more critical. A growing number of people requiring rehabilitation generates significant costs, of which personal expenses are a major component. Providing the human personnel with appropriate mechatronic devices or replacing at least some rehabilitation medicine specialists with robots could reduce physical and mental workload of physicians. Broader application of such devices will also require among others new solutions in mechanic, control and human-robot communication. This paper presents overall vision of the development of rehabilitation robots, with consideration of the observed trends in this area, as well as expected achievements in electronics, material’s engineering, ICT and other related fields of science and technology. Keywords: Robotics in Rehabilitation • Motor rehabilitation • Disabled people • Elderly people • Development trends 1 Introduction At the end of the 20th century in many R&D centers around the world they were carried out various projects related to the use of robotics solutions to aid and assist motor rehabilitation. Currently, these works have entered the phase of commercialization. There are many companies offering ready-made devices. There is a fairly widespread belief that the effectiveness of rehabilitation grows thanks to the use of modern robotics or broadly mechatronics systems. Despite this fact the widespread dissemination of them still encounters obstacles. The reason is certainly the price of these devices. They are simply expensive. There is also many to do in the field of construction. This applies to both the mechanics, control as well as of the widely understood human adfa, p. 1, 2011. © Springer-Verlag Berlin Heidelberg 2011 communication (patient or therapist) with the robot. Currently ongoing R&D works are concentrated on these problems. 2 Arguments for the application of mechatronic devices in supporting rehabilitation 2.1 Current medical studies and future challenge to robotized technology In the last decades we saw a remarkable change in the neuro-rehabilitation approach. New theories based on plasticity shoved property of the adult human brain to remap and create new neural pathways. The intensity of these processes depends on many factors. In the areas of the brain responsible for control and supervision of the motorics, a significant impact on the creation of new synaptic connections, is physical activity. These exercises can be performed by patient himself or with assistance of a therapist. The individual therapeutic movements must be repeated many times, over and over again. For this reason, the work of therapist is very hard physically and tedious. Understanding the opportunities offered by plasticity and awareness of the hardships and difficulties carrying out rehabilitation, led to innovative concepts to use in these therapeutic activities the robotic and mechatronic devices. A precursor was the MITManus robot, which was developed in 1989, and in 1994 it was installed in the clinic, where the first tests were successful conducted. [1]. Since then multitude of robotic devices were developed and tested for neurorehabilitation. A majority of these technically advanced devices are designed for clinical settings. However, there is still need to improve efficiency and reduce cost. Future development of accessible home-based devices for therapy and Activities of Daily Living (ADL) assistance is essential. Robot Assisted Therapy (RAT) efficacy has been studied in stroke patients. A recent meta-analysis concluded that RAT could improve upper limb (UL) structure and function and the ADL of these patients [2]. But still the effectiveness of robotic over conventional therapy is arguable and the best therapy strategy is still not clear. Recent recommendations based on motor learning theories state that intensive rehabilitation is necessary for improving motor function in children with Cerebral Palsy CP [3]. Robotic therapy which is: goal-oriented, assisted if needed, associated with sensory feedback may promote reorganization of the neuronal networks and restoration of normal function after brain lesion. RAT of the upper limb has been applied in children with CP with promising results [4]. However, there are no currently published randomized controlled trials, and such studies are needed to confirm the usefulness of RAT in children with CP. Up to now, robotics and virtual reality, have proven to be applicable in the area of neurorehabilitation but not in the orthopedic and rheumatology. Potential applications of robotics in orthopedic and rheumatologic rehabilitation of upper limb are enormous. As with stroke patients a spread of home based inexpensive RAT systems may have huge influence on health care system. Recent search into the US Clinical Trials database (http://clinicaltrials.gov/) from October 2015 using a combination of keywords: robot, hand, upper limb and rehabili- tation identified 8 new trials recruiting patients. All studies focus on stroke survivors. Main topics are combination of RAT and electrical stimulation or pharmacotherapy, and efficacy of different robots designs and treatment strategies. Robots are: ReHapticKnob, InMotion3(IMT), Bi-Manu-Track (BMT), Armeo, Hand of Hope (HOH), Active and Sham tDCS. There is still a need for well-designed large scale multicentre studies to evaluate usefulness of RAT in UL rehabilitation. Further research should also investigate potential of RAT in ADL function recovery. Also in combination with neuro-imaging techniques might be useful to provide the evidence of neural remodeling. 2.2 Robotic devices for motor rehabilitation currently used in therapeutic practice Considering UL rehabilitation, we can talk about variety of devices, with different type of assistance, mechanical structure, control inputs, supported movements and fields of application. Basic division of robotic rehabilitation devices consist of the type of assistance provided by the actuators [5]. Active devices (e.g.Myomo, PowerGrip, ReoGo) provide active motion assistance. This devices posses active actuator(s) able to produce movement of the upperextremity. Such assistance of movements is preferred for patients with significant movement disorders at early stage of rehabilitation. Passive devices (e.g.Armeo Spring), are unable to move the limbs, but may resist the movement e.g. when exerted in the wrong direction. Thus, this type of devices is appropriate for rehabilitation of patients with preserved ability to move their limbs. Usually they are lighter and cheaper than those with active assistance [6]. Nowadays, most popular, commercial rehabilitation robots used in Poland, created for upper extremity are Armeo Power, Armeo Spring (Hocoma, Switzerland) and ReoGo (Motorika Medical Ltd, Israel) [7]. All of them are exoskeleton-based devices, that enhances patient motivation through a variety of interactive and stimulating games that imitate natural hand movements. Armeo Power enables intensive arm rehabilitation for early-stage patients even before they develop active movement. In the multicenter study the ArmeoPower was shown to lead to faster and better recovery after stroke compared to conventional therapy. However, the absolute difference between effects of robotic and conventional therapy was small and of weak significance, which leaves the clinical relevance in question [8]. Armeo Spring is suitable for the patients from severely to moderately affected. It is specifically designed for patients who are beginning to regain active movement of the arm and hand. Data from study comparing the effects of equal doses of robotic and conventional therapy in individuals with chronic stroke suggest, that Armeo Spring therapy can elicit improvements in arm function that are distinct from conventional therapy and supplements conventional methods to improve outcomes [9]. ReoGo is the robotic system designed to facilitate three-dimensional repetitive arm movements through the use of an advanced, fully motorized robotic arm. The system is suited for patients in all stages of stroke recovery, offering five modes of operation; ranging from passive support for highly functional patients to guided motion for cases with little or no arm mobility. Bovolent et al [10] showed a positive evolution of the limitation of activity and functionality for all subjects treated with ReoGo. 3 Initial development of Rehabilitation Robotics The positive impact of exercises on both physical and mental health was known even in the ancient times. Back in those days, exercises were meant to help improve and maintain general fitness, as well as regain such fitness by people who had been injured. Physical exercises were systematized according to their therapeutic effects on specific body parts by H. Ling [11], which laid the groundwork for the emergence of so-called medical gymnastics. In the 19th century, it was widely promoted and developed in many centre's all over the world and often applied in the treatment of orthopedic disorders. The first therapeutic facilities were opened in places with appropriate climate, where patients received comprehensive recuperation treatment. In such centre's, where numerous patients would undergo medical gymnastic exercises at the same time, exercise-facilitating devices were becoming more and more popular. Those included mainly mechanical devices. One of the most renowned creator of devices used in medical gymnastics was a Swedish doctor named Jonas Gustaw Wilhelm Zander, who developed a method of treatment and regaining fitness through exercises performed on the apparatuses he designed [12]. Devices assisting physical rehabilitation were developed through upgrading their construction and introducing new materials. The natural consequence of this development was emergence of a new field of study - rehabilitation robotics. The first R&D works on the application of robotised technologies in supporting physical rehabilitation on record were carried out in USA in the early 1960s. Rancho Los Amigos National Rehabilitation Center (Rancho) created an electrically-powered orthosis with seven degrees of freedom. This device called Golden Arm[13] was initially designed for patients with the post-polio syndrome. At the same time, scientists from the Case Institute of Technology (Cleveland, Ohio, currently: Case Western Reserve University) created a pneumatic orthosis with four degrees of freedom. In both cases, practical application of the inventions was difficult due to insufficiently effective control systems and the lack of sensors that would ensure feedback depending on the position, speed and force. Further development of advanced sensor and computer technologies and their subsequent application in the field of robotics encouraged works on rehabilitation robots. In the 1980s, those efforts took place mainly on American and Western European universities and their research & development centres. It coincided with a breakthrough in medical research over the organisation of brain functioning and the nervous tissue structure, which significantly expanded the knowledge about brain and its highly flexible internal construction. Scientists coined a term of neuroplasticity meaning the ability of nerve cells in the brain to regenerate and create new networks with other neurons. As a result, the healthy nervous tissue can take over those functions of the brain, which have been impaired as a result of a local irreversible damage, e.g. caused by a stroke. It means that, through effective physical training requiring regular and long-term exercises, patients can teach their brains again to perform certain activities (such as walking, grabbing, etc.). The results of the medical research encouraged further research and development works over new and advanced rehabilitation devices using the solutions hitherto applied in robotics. One of the first mechatronic rehabilitation devices, which have been positively evaluated by the global medical community, is the Manus robot developed in MIT [14] to assist the rehabilitation of upper limbs. Its mechanical part is composed of a manipulator having the kinematic structure of the robot named SCARA. The control system integrates the sensors of force and location with the complex patient-robot communication interface. The positive impact of the Manus robot application on the rehabilitation process was confirmed by research results. The response of patients to the new device and exercise method was highly positive. However, kinematic properties of the Manus robot manipulator enable only a single-plane motion, which somewhat limits its application. Another concept was implemented in the University of Stanford. The solution was based on a classic industrial robot called PUMA (Staubli Unimation Inc.), which using a special mechanical interface, leads patient's arm along the programmed trajectory. This system named MIME (Mirror Image Movement Enabler) enables movement of the rehabilitated upper limbs along multi-plane trajectories [15] Similar approach was applied in one of the first European projects in the field of robot-assisted arm rehabilitation. Reharob was created under the 5th EU Framework Program [6]. Its main objective was to develop an arm rehabilitation system using standard robots. The project was coordinated by the University of Budapest and the consortium included the ABB company, which supplied two industrial robots. Owing to proper situation (one robot supports the arm near the elbow and another robot moves the patient’s wrist) and control of those robots, the system enables the movement of the patient’s arm on all anatomical planes of motion. Research on devices supporting motor rehabilitation of UL has been performed for many years by the PIAP institute in Warsaw. One of their most interesting projects is Renus-1, mechatronic active rehabilitation assistance system. This device provides capability of performing complex, controlled spatial movements of patient’s UL [12]. The solutions, developed and successful tested within R&D projects, were the basis for commercialization of rehabilitation robotics, through applied many similar constructions in devices designed for the market. 4 Mechanical structure of robotic devices for movement rehabilitation When comparing the mechanical structure of robotic devices for movement rehabilitation, two categories of devices are considered. These are end-effector-based and exoskeleton-based devices. The difference between those two is how the movement is transferred from the device to the patient’s limb. 4.1 End-effector based devices This devices (e.g. InMotion ARM) contact the patient’s limb only at its most distal part what simplifies the structure of the device. Although, this feature can reduce the control of the position of particular joints because of many possible degrees of freedom. Movements of the end effector change the position of attached upper limb. Segments of upper limb create a mechanical chain, thus movements of the end effector also indirectly change the position of other segments of the patient’s body. The advantage of end-effector based systems is their simpler structure and less complicated control algorithms. However, it is difficult to isolate specific movements of a particular joint because these systems produce complex movements. The manipulator allows up to 6 unique movements (3 rotations, 3 translations). Control of the movements of the patients upper limb is possible only if the sum of possible anatomical movements of patient arm in all assisted joints is limited to 6. The typical end-effector based systems are presented in Fig. 3. a) b) c) Fig. 1. a) MIT-MANUS [14] b) MIME [15] c) NeReBot [19] 4.2 Exoskeleton-based devices This devices (e.g. Armeo Power) are an external mounted mechanisms which have a mechanical structure that mirrors skeletal structure of patient’s limb. Their joints match those of the human body. Movement in particular joint of the device directly produces a movement of the specific joint of the limb. It adapts to a person so that physical contact between the operator and the exoskeleton enables a direct transfer of mechanical power and information signals [16]. It's more complex than an endeffector based device, however this design allows independent, precise and isolated movements in a joint(s). Application of the exoskeleton-based approach allows independent and concurrent control of particular movement of patient’s arm in many joints, even if the overall number of assisted movements is higher than 6. In order to avoid patient injury, it is necessary to adjust lengths of particular segments of the manipulator to the lengths of patient´s arm segments. Therefore setting-up such device for a particular patient may take a significant amount of time. Furthermore, the position of the center of rotation of many joints of human body may change significantly during movement, therefore special mechanisms are necessary to ensure patient safety during the movements of these joints. For this reason, the mechanical and control algorithm complexity of such devices is usually significantly higher than of the end effector-based devices. The complexity escalates as the number of DOF increases. The typical exoskeleton based devices are presented in Fig. 2. a) b) c) Fig. 2. a) ARMin [5] b) WOTAS [20] c) MULOS [5] Although exoskeleton based devices are now more popular, both directions are being developed. End-effector based devices better placed to exercise typical utility movements of the upper limb. In addition, they are much cheaper than the exoskeleton based devices. 5 New solutions in control Nowadays majority of rehabilitation robots, used in practice, have very similar structure of control. The main controller is responsible for the trajectory realization. The function of master computer, usually PC type, contains human robot communication, planning and collecting of exercises, as well as supervision of their execution. On this computer data, the basis of patients and exercises is stored. This computer also contains different kinds of animations and games, for ease of patient's motivation to exercise. The R&D in area of control can be presented in 3 directions. 5.1 Virtual Reality Rehabilitation based on VR is characterized by the integration of cognitive and physical tasks within a multimodal sensory environment [17]. The game based VR systems can be successfully used to the restoration and rehabilitation of hand function of after stroke persons. Possibility and attractiveness of VR in the post stroke individuals rehabilitation is evident and conformed by clinically performed tests. 5.2 Haptics interfaces Important limitation of mechatronic rehabilitation devices is the lack of function of feeling. When a therapist practices an exercise, he feels resistance of the patient and can change the movement according to this reactions. In order to implement such kinds of functions in rehabilitation robots, the first step is to equip it with special sensors. The solution is to use so called haptic interfaces, which enables measure the back forces between patient and robot. Two possibilities are analyzed and researched today. The first one is installation of special sensors in joints of the robot (measurement of motion resistance). The second method is installing these sensors in the point where robot has direct contact with patient (tactile sense of touch). 5.3 Human-Robot Communication Nowadays usually two ways of communication of the rehabilitation robots are used: with patient and therapist. Screens or monitors are used as a standard solution [18]. Various information, such as mechanism for exercise planning, options, supervision as well as information about the progress of the exercise are displayed on the therapist screen. Animations and games are presented on the patient monitor. The next step should be introducing a voice communication. Especially it is important to implement such a functionality, where robot will recognize specific messages from patient, e.g. about pain that occurs during exercise. In relation to the perspective appearance of home rehabilitation robots, it is necessary to develop remote access that enables the therapist, doctor, caregiver to obtain information about the progress of rehabilitation, patient's condition, etc. 6 Summary Robot aided neurorehabilitation is rapidly developing field, based on robotics and mechatronics, virtual reality , haptic interfaces, neuroscience and conventional rehabilitation. It can be characterized by challenges both in engineering and in clinical practice. There is a need for more integrated solutions to perform a therapy in a safe environment and with a good compliance from the patients. Robotic rehabilitation is certainly undergoing a period of rapid growth. Notwithstanding, many issues remain still open. Robotic rehabilitation may offer benefits not only in terms of cost reduction but also allows quantifying objectively the patient outputs and outcomes (for example strength improvement, coordination, time of movements). Present researches are applied to improve the efficiency of robotic manipulation, the strengths, trajectories, and multi-sensorial inputs in order to provide the quality and efficiency of rehabilitation. In the near future robotic rehabilitation devices for UL will be available to clinicians, both in the hospitals and in homes. For this purpose the main barrier is the price, these devices must be considerably cheaper. In the case, where the robot-type rehabilitation apparatus, will not be operated by a trained therapist, but by the patient himself, a new security problems will appears. Acknowledgements The paper presents results of researches supported by EU within the project RoboReha „Robotics in Rehabilitation”, LdV - TOI no. 13310 0530, under the Lifelong Learning Programme. This publication represents only author´s opinion and neither the European Commission nor the National Agency is not responsible for any of the information contained in it. 7 References 1. Krebs H., Hogan N., Volpe BT., Alsen ML., Edelstein L., Diels C. Overview of clinical trials with MIT-MANUS: a robot -aided neurorehabilitation facility. Technol. Health Care 1999, 7(6):419-23 2. Mehrholz J, Hädrich A, Platz T, Kugler J, Pohl M. Electromechanical and robot-assisted arm training for improving generic activities of daily living, arm function, and arm muscle strength after stroke. Cochrane Database Syst Rev. 2012;(6): 3. Sakzewski L, Ziviani J, Boyd R. Systematic review and meta-analysis of therapeutic management of upper-limb dysfunction in children with congenital hemiplegia. Pediatrics.2009;123:1111-1122 4. Frascarelli F, Masia L, Di Rosa G, et al. The impact of robotic rehabilitation in children with acquired or congenital movement disorders. Eur J Phys Rehabil Med. 2009;45:135-141 5. Koukolová L.: Overview of the robotic rehabilitation systems for upper limb rehabilitation, Transfer inovácií 30/2014 6. Maciejasz et al.: A survey on robotic devices for upper limb rehabilitation. In: Journal of neuroengineering and rehabilitation, 2014, 11:3. 7. Mikołajewska E, Mikołajewski D.: Usage of robotic rehabilitation for improvement, Niepełnosprawność - zagadnienia, problemy, rozwiązania. Nr IV/2013(9), in Polish 8. Klamroth-Marganska V, Blanco J, Campen K, Curt A, Dietz V, Ettlin T, Felder M, Fellinghauer B, Guidali M, Kollmar A, Luft A, Nef T, Schuster-Amft C, Stahel W, Riener R.: Three-dimensional, task-specific robot therapy of are after stroke: a multicentre, parallelgroup randomised trial, Lancet Neurol. 2014 Feb;13(2):159-66 9. Brokaw EB, Nichols D, Holley RJ, Lum PS.: Robotic therapy provides a stimulus for upper limb motor recovery after stroke taht is complementary to and distinct from conventional therapy. Neurorehabil Neural Repair. 2014 May;28(4):367-76 10. Bovolenta F, Sale P, Dall'Armi V, Clerici P, Frances M.:Robot-aided therapy for upper limbs in patients with stroke-related lesions. Brief report of a clinical experience,J Neuroeng Rehabil. 2011; 8: 18 11. Brodin H.: Per Henrik Ling and his impact on gymnastic. Sven Med Tidskr, 2008;12(1):618 (in Swedish) 12. Pilat Z., Klimasara W. J., Juszyński Ł., Michnik A.: Research and development of rehabilitation robotics in Poland. ROBTEP 2014. Applied Mechanics and Materials Vol. 613 (2014) pp 196-207, © (2014) Trans Tech Publications, Switzerland 13. Lansberger S, Leung P., Vargas V., Shaperman J., Baumgarden J., Yasuda Lynn Y., Sumi E., McNeal D., Waters R.: Mobile Arm Supports: History, Application, and Work in Progress. Top Spiral Cord Inj Rehabil 2005: 11(2):74-94 Thomas Land Publishers, Inc. 14. Krebs H.I. et al. Robot–aided neurorehabilitation: from evidence-based to science-based rehabilitation. Top stroke Rehab. 2002; 8:54-70. 15. Lum P. S., et al. MIME robotic device for upper-limb neurorehabilitation in subacute stroke subjects: A follow-up study. Journal of Rehabilitation Research & Development. Volume 43, Number 5, Pages 631–642. August/September 2006 16. Pons J.L., Rocon E., Ruiz A.F. and Moreno J.C. Upper-Limb Robotic Rehabilitation Exoskeleton:Tremor Suppression, Rehabilitation Robotics, Sashi S Kommu (Ed.), ISBN: 9783-902613-04-2, InTech, 2007 17. Wade E., Winstein C.J.: Virtual Reality and Robotics for Stroke Rehabilitation: Where Do We Go from Here. Top Stroke Rehabil 2011; 18(6): 685-700. 2011 Thomas Land Publishers, Inc. 18. Dunaj J., Klimasara W.J., Pilat Z., Rycerski W.: Human-Robot Communication in Rehabilitation Devices. JAMRIS Journal of Automation, Mobile Robotics & Intelligent Systems, ISSN 1897-8649, VOLUME 9, N° 2 2015, pp. 9-19 19. Masiero S., Celia A., Rosati G., and Armani M.: Robotic-assisted rehabilitation of the upper limb after acute stroke. Archives of Physical Medicine and Rehabilitation, 88(2):142–149, 2007 20. Rehabilitation Robotics. Chapter 25 Upper-Limb Robotic Rehabilitation. Exoskeleton: Tremor Suppression. Edited by Sashi S Kommu, ISBN 978-3-902613-04-2, I-Tech Education and Publishing, 2007