Journal of Theoretical Biology ∎ (∎∎∎∎) ∎∎∎–∎∎∎
Contents lists available at ScienceDirect
Journal of Theoretical Biology
journal homepage: www.elsevier.com/locate/yjtbi
Armstrong–McGehee mechanism revisited: Competitive exclusion
and coexistence of nonlinear consumers
Xiao Xiao a,n, Gregor F. Fussmann b
a
b
Utah State University, Department of Biology and the Ecology Center, 5305 Old Main Hill, Logan, UT 84322-5305, USA
McGill University, Department of Biology, 1205 Ave Docteur-Penfield, Montreal, Quebec, Canada H3A 1B1
H I G H L I G H T S
We model a system with one logistically growing resource and two nonlinear consumers.
Both the potential coexistence region and realized coexistence region are examined.
Coexistence bandwidth mainly expands with decreasing similarity between consumers.
Non-monotonic changes occur at high nonlinearity due to reduced parameter space.
art ic l e i nf o
Keywords:
Exploitative competition
Functional response
Relative nonlinearity
a b s t r a c t
A number of mechanisms have been proposed to explain the coexistence of species engaging in
exploitative competition. The Armstrong–McGehee mechanism relies on different levels of nonlinearity
in functional response between competing consumers and their ability to avoid competitive exclusion
through temporal resource partitioning during endogenously generated fluctuations. While previous
studies have mainly focused on cases where one consumer has nonlinear functional response and the
other consumer has linear functional response, our study assessed coexistence and competitive exclusion
under a more realistic scenario with two nonlinear consumers. Using analytical and numerical methods
we found that the potential of coexistence of the two consumers decreases with increasing nonlinearity
in the more linear species; increasing nonlinearity in the more nonlinear species, however, resulted in
non-monotonic changes in the parameter space allowing coexistence. When coexistence potential is
quantified under the presupposition that each consumer must be able to persist with the resource by
itself, coexistence becomes consistently less likely with increasing similarity of the functional responses
of the two consumers. Our results suggest that the Armstrong–McGehee mechanism is unlikely to
operate as the sole coexistence-promoting mechanism in communities with generally nonlinear
consumer–resource interactions. However, its role as a module in more complex systems and in synergy
with other factors remains to be established.
& 2013 Elsevier Ltd. All rights reserved.
1. Introduction
Defining the conditions under which competing species can
coexist has a long history in theoretical ecology. When two or
more species compete for concrete resources (“exploitative competition”) the conditions for steady-state coexistence are quite
stringent. In essence, only as many consumer species as there are
resources can stably coexist, a tenet known as the “competitive
exclusion principle” (Hardin, 1960). The principle is clearly at odds
with the observation that many more species coexist in the real
world than would be suggested by the handful of mineral resources
n
Corresponding author. Tel.: +1 435 213 6322.
E-mail addresses: xiao.xiao@usu.edu, xiao@weecology.org (X. Xiao).
that ultimately limit the growth of primary producers at the base of
food webs (Hutchinson, 1961). Subsequent theoretical work has
attempted to reconcile the competitive exclusion principle with
naturally observed patterns of coexistence by relaxing the assumptions under which coexistence must occur. These attempts have
focused on effectively eliminating competition through segregation
of competitive forces across space (“metapopulations”; Levins, 1969;
Richards et al., 2000) or time (“storage effect”; Chesson, 2000;
Chesson and Warner, 1981; Descamps-Julien and Gonzalez, 2005)
or have explored the consequences of relaxing the assumption of
steady-state coexistence.
In our paper we are concerned with the latter case and provide
an analysis of coexistence in a fluctuating two-consumer–oneresource system. Our study follows a long tradition of theoretical
investigations of coexistence in this most basic module of
0022-5193/$ - see front matter & 2013 Elsevier Ltd. All rights reserved.
http://dx.doi.org/10.1016/j.jtbi.2013.05.025
Please cite this article as: Xiao, X., Fussmann, G.F., Armstrong–McGehee mechanism revisited: Competitive exclusion and coexistence of
nonlinear consumers. J. Theor. Biol. (2013), http://dx.doi.org/10.1016/j.jtbi.2013.05.025i
2
X. Xiao, G.F. Fussmann / Journal of Theoretical Biology ∎ (∎∎∎∎) ∎∎∎–∎∎∎
exploitative competition. In this scenario, resource fluctuations
provide periodically recurring conditions that lead to alternating
competitive superiority of one of the two competitors and thereby
facilitate coexistence. This mechanism has been shown, in principle, to allow two consumers to coexist on a single resource, both
for exogenously forced and endogenously generated oscillations
(Abrams, 2004; Armstrong and McGehee, 1980; Hsu et al., 1978a,
1978b; Koch, 1974). The endogenous case is of particular interest
because it provides a mechanism by which coexistence could arise
from within the consumer–resource system itself without environmental stochasticity or forcing. Because of the great influence of
the classical Armstrong and McGehee (1980) paper describing this
mechanism of coexistence due to endogenous cycles, we refer to it
as the “Armstrong–McGehee mechanism”.
Previous investigations into the conditions for coexistence in
the oscillating two-consumer–one-resource system postulate a
linear resource uptake function (functional response) for one of
the consumers while the other consumer has a saturating (Holling
type II; Holling, 1959) functional response. A nonlinear functional
response is a necessary condition for coexistence because it
provides the potential for endogenous stable limit cycles in the
consumer–resource system and, after coupling, the second consumer can be entrained into these cycles. A saturating nonlinear
functional response also enables the “linear consumer” to enjoy
higher growth rates at high resource concentrations during the
cycles while the “nonlinear consumer” is superior at periods of low
resources (although this could also be accomplished with two
linear functional responses). Multiple studies have established that
coexistence and mutual invasion of competitors is possible in such
linear–nonlinear systems and that the parameter space allowing
coexistence increases with the degree of relative nonlinearity of
the Holling type II function (Abrams and Holt, 2002; Hsu et al.,
1978b). In a number of more recent papers (Abrams and Holt,
2002; Abrams, 2004; Abrams et al., 2003) the authors found a
substantial parameter bandwidth of coexistence, which led them
to conclude that relative nonlinearity may have been discarded
prematurely as a coexistence-generating mechanism.
Nonlinear, saturating functional responses of the Holling type II
are widespread in nature (Jeschke et al., 2004) and are likely a
much more realistic representation of consumer–resource interactions in nature than the linear functional responses used in
Lotka–Volterra frameworks. The traditional approach that couples
a linear consumer with a nonlinear one to a shared resource is
therefore a rather special and extreme case in a universe of coupled
consumer cases that vary in the relative nonlinearity of their functional responses. In this paper we use analytical and numerical
methods to investigate the more general case of two nonlinear
consumers. The nonlinear–nonlinear system is analytically richer
than the linear–nonlinear system because each of the two consumers
can either cycle or stably coexist with the resource in the absence of
the other consumer. In determining the potential for coexistence we
thus need to distinguish the cases where one consumer–resource
module is stable and the other is not, plus the case where both are
unstable. We also use numerical simulations to determine the fraction
of the parameter space for which coexistence is actually achieved
(“realized coexistence”).
Our goal is to establish a relationship between coexistence –
potential or realized – and the degree of relative nonlinearity
between the consumers' functional responses. While it is fairly
obvious that involvement of one linear consumer maximizes
the potential for coexistence, the rate at which the potential
diminishes with gradual changes of nonlinearity has not been
formally established. Moreover, it is not a foregone conclusion that
maximum differences in the relative nonlinearity of the consumers also maximize the potential for coexistence; highly nonlinear
functional responses can diminish the parameter space in which
consumers can successfully exploit their resource and this effect
may interfere with the competitive relationship of the two consumers. Hence, a formal theoretical analysis of coexistence under
variable relative nonlinearity is necessary to determine the true
potential of the Armstrong–McGehee mechanism for promoting
coexistence in natural communities.
2. Methods
We focus on a modified Armstrong–McGehee system (Armstrong
and McGehee, 1980) with two consumers and one biotic resource.
Both consumers have saturating (Holling Type II) functional
responses; the resource grows logistically when the consumers
are absent:
dR
R
C 1 P1
C2 P2
¼ R r 1−
−
−
ð1:1Þ
dt
K
1 þ h1 C 1 R 1 þ h2 C 2 R
dP 1
B1 C 1 R
¼ P1
−D1
1 þ h1 C 1 R
dt
ð1:2Þ
dP 2
B2 C 2 R
¼ P2
−D2
1 þ h2 C 2 R
dt
ð1:3Þ
The coupled differential equations represent the rate of change
of the three state variables in the system: resource (R), consumer 1
(P1), and consumer 2 (P2), respectively. r and K denote the intrinsic
population growth rate and carrying capacity of the resource; hi,
Bi, Ci, and Di denote the handling time, conversion efficiency,
attack rate, and mortality rate of the corresponding consumer. Let
t′¼tr, R′¼R/K, P′i ¼Pi/(BiK), ai ¼BiCiK/r, bi ¼KCihi, and di ¼Di/r (i¼1, 2).
With the primes dropped, the system can be simplified to (Abrams
and Holt, 2002):
dR
a1 P 1
a2 P 2
¼ R ð1−RÞ−
−
ð2:1Þ
dt
1 þ b1 R 1 þ b2 R
dP 1
a1 R
¼ P1
−d1
1 þ b1 R
dt
ð2:2Þ
dP 2
a2 R
¼ P2
−d2
1 þ b2 R
dt
ð2:3Þ
Here ai is a scaling parameter which determines proportionally
the growth rate of Pi conditional on the resource level R and bi,
while bi can be interpreted as a measure of the nonlinearity of the
corresponding functional response; smaller bi indicates that the
functional response reaches half saturation at higher resource
level. When one of the bi values is zero, the functional response
of the corresponding consumer degenerates into a linear one, and
the system is equivalent to the one studied by Armstrong and
McGehee (1980).
We evaluated the coexistence of the two consumers as a twodimensional coexistence bandwidth (Abrams and Holt, 2002;
Armstrong, 1976), i.e., range of parameter space allowing coexistence. Here we portrayed coexistence bandwidth on the d1−d2
plane (i.e., mortality rates of the two consumers), as they determine the dynamics of the system when the functional responses
are fixed (Abrams and Holt, 2002). We analyzed the effect of
nonlinearity in functional responses (b1 and b2) both for the
“potential region of coexistence”, which is defined by analytical
criteria fulfilling the necessary conditions for coexistence (see
Section 3.1), and the “realized region of coexistence”, which can
only be obtained with numerical simulations. Without loss of
generality, we assume throughout our paper that b1 4 b2 (the
special case where b1 ¼b2 can never sustain stable coexistence; see
Section 3.2). To establish the relationship between relative nonlinearity (bi) and the realized range of coexistence, we investigated
Please cite this article as: Xiao, X., Fussmann, G.F., Armstrong–McGehee mechanism revisited: Competitive exclusion and coexistence of
nonlinear consumers. J. Theor. Biol. (2013), http://dx.doi.org/10.1016/j.jtbi.2013.05.025i
X. Xiao, G.F. Fussmann / Journal of Theoretical Biology ∎ (∎∎∎∎) ∎∎∎–∎∎∎
b1−b2 combinations with both bi values varying independently
from 0 to 10 at intervals of 0.5 (with a1 ¼ a2 ¼1, and the restriction
that b1 4b2). For each b1−b2 combination, we evaluated the
competitive outcome in the two-consumer–one-resource system
for 10,000 grid points on the d1−d2 plane that lay within a
rectangular region allowing each consumer to survive with the
resource in the absence of the other consumer (see Section 3.1).
A parameterization was scored as “coexistence” if mutual invasion
occurred, i.e., if each consumer was capable of invading a system in
which the other consumer was in its limiting dynamics with the
resource, which is a necessary requirement for coexistence (Abrams
and Holt, 2002; Armstrong and McGehee, 1980; McGehee and
Armstrong, 1977). When the attractor ensuring coexistence is not
globally stable, coexistence may not be equivalent to mutual invasion
(Abrams, 1999). However, we have evaluated multiple starting points
with different levels of R, P1 and P2 for a variety of bi−di combinations,
and have not found any case where the competitive outcome implied
by the criteria of mutual invasion differed from the dynamics of the
system with both consumers present (results not shown).
The limiting dynamics of the “resident” consumer can be either at
stable equilibrium or stable oscillation (Armstrong and McGehee,
1980). When the “invader” invades a system that is at stable
equilibrium, successful establishment of the invader requires
Rninvader o Rnresident
ð3Þ
i.e., the invader has a lower requirement in terms of resource
concentration to achieve positive growth compared to the resident
species; the invader thus can increase in abundance when it is rare
(Armstrong and McGehee, 1980). On the other hand, when the
invader invades a system which undergoes stable limit oscillations,
successful invasion requires that the long-term per-capita growth
rate of the invader averaged over one oscillatory period of the
resource is positive, i.e.,
Z
Z 1 τ 1 dP i
1 τ
ai RðtÞ
dt ¼
−di dt 40
ð4Þ
τ 0 P i dt
τ 0 1 þ bi RðtÞ
where τ is the period of the limit cycle of the resident consumer, Pi is
the abundance of the invading consumer, and R(t) is the resource
level fluctuating through the limit cycle generated by the resident
consumer (Armstrong and McGehee, 1980).
For each (b1 b2) parameterization at each grid point on the
d1−d2 plane, the inequalities corresponding to the limiting
dynamics of the two one-consumer–one-resource systems were
assessed to determine if each of the consumers was able to invade
the system with the other consumer and the resource. If so, this
parameter combination was scored as “coexistence.” The area of the
realized region of coexistence for a specific (b1 b2) combination was
then calculated as (number of d1−d2 combinations allowing coexistence) (area of rectangular region allowing each consumer to
persist with the resource)/10,000.
While difference in the nonlinearity (bi) of the functional
response is essential for the Armstrong–McGehee mechanism to
operate, coexistence may also depend on ai, which influences the
growth rate of Pi as well as its equilibrium P1n (see Section 3.1). To
evaluate the effect of ai on coexistence, we followed a similar
procedure as our analyses for bi. a1 and a2 were allowed to vary
independently from 1 to 5 at intervals of 0.5, while b1 and b2 were
fixed at either b1 ¼10 and b2 ¼0, where consumer 2 has a linear
functional response and always reaches stable equilibrium as its
limiting dynamics with the resource, or b1 ¼ 10 and b2 ¼3, where
both consumers have the potential to oscillate. For each parameter
combination (a1, a2, b1, b2), the rectangular region on the d1−d2
plane allowing each consumer to persist with the resource when
the other consumer is absent (see Section 3.1) was partitioned into
3
10,000 grid points, where realized coexistence was assessed with
the criterion of mutual invasion.
All simulations were carried out in R 2.12.2 (R Development
Core Team, 2011) (code is available at: https://github.com/weecol
ogy/AM_coexistence). Differential equations were solved with
package ‘deSolve’ (Soetaert et al., 2010), parallel computing was
achieved with packages ‘snow’ (Tierney et al., 2011) and ‘foreach’
(Revolution Analytics, 2011), and 3-D plots were constructed with
packages ‘lattice’ (Sarkar, 2008) and ‘gridExtra’ (Auguie, 2011).
Each simplified system with one consumer and the resource was
allowed to run for 10,000 time steps with initial step size 0.1 for it
to approach limiting dynamics. If integration failed, the procedure
was repeated with step size reduced to 1/5 of its previous value,
until convergence was achieved. To evaluate the condition for
mutual invasion, the resource level from the last 2500 (i.e., 7501–
10,000) time steps was assessed against one of the two above
inequalities, depending on the limiting dynamics of the focal
system. Although for oscillatory dynamics 2500 time steps did
not normally encompass an integer number of cycles, we assumed
that the system went through enough cycles in 2500 time steps for
the imprecision to be averaged out. To ensure that all systems have
approached their limiting dynamics by time step 7501, we
assessed the coefficients of variation (CV) among the maximal as
well as the minimal resource levels within the five 500 time-step
segments from 7501 to 10,000 for each parameter combination
with oscillatory limiting dynamics. Systems with CV≤0.05 among
both the maxima and the minima were deemed to have reached
limiting dynamics, while the dynamics of systems with CV 40.05
(74 cases out of 1368) were individually plotted and examined.
Our analysis showed that systems with high CV had either long
oscillatory periods (4 500 time steps) or extreme oscillatory
cycles for which the cycle maxima and minima were not always
well captured with discrete time steps; however we found no case
in which the system had not approached limiting dynamics by
time step 7501 (results not shown; code is available at: https://
github.com/weecology/AM_coexistence/blob/master/coexisten
ce_additional_analysis_stability.r).
3. Results
3.1. The potential region of coexistence
Hsu et al. (1978b) investigated analytically the competitive outcome of two consumers with Holling Type II functional responses
that feed on a logistically growing resource and derived conditions
for exclusion of one or both consumers. We translated their theorems
into restrictions on coexistence bandwidth (in terms of d1 and d2),
and by interpreting coexistence as the complement of the parameter
space resulting in competitive exclusion, obtained the following set of
necessary (but not sufficient) conditions that have to be fulfilled for
existence to be possible (with the assumption b1 4b2; for detailed
derivation, see Appendix):
1: d1 o
a1
;
1 þ b1
d2 o
a2
1 þ b2
This condition gives the upper bounds of d1 and d2 that allow
for persistence of the corresponding consumer with the resource
when the other consumer is absent. If di goes beyond the bound,
the growth rate of Pi is negative even when the resource level is at
its maximum (i.e., carrying capacity ¼ 1 in the scaled system),
which will lead to extinction of Pi.
2: d2 ≤
a2 ðb1 þ 1Þ
d1
a1 ðb2 þ 1Þ
Please cite this article as: Xiao, X., Fussmann, G.F., Armstrong–McGehee mechanism revisited: Competitive exclusion and coexistence of
nonlinear consumers. J. Theor. Biol. (2013), http://dx.doi.org/10.1016/j.jtbi.2013.05.025i
X. Xiao, G.F. Fussmann / Journal of Theoretical Biology ∎ (∎∎∎∎) ∎∎∎–∎∎∎
4
This condition can be interpreted as follows: when the resource
level is at carrying capacity, the per capita mortality rate of
consumer 2 is a smaller fraction of its per capita growth rate
compared to that of consumer 1. The inequality ensures that
consumer 2 is competitively dominant over consumer 1 at high
resource levels. d1−d2 combinations in the region above this line
lead to the exclusion of consumer 2.
3: d2 ≥
a2
a1 =d1 −b1 þ b2
This condition implies that the minimal resource requirement
of consumer 2, R2n, is higher than the minimal resource requirement of consumer 1, R1n, which gives an advantage to consumer
1 when the resource level is low. For d1−d2 combinations below
the curve, consumer 1 is inferior to consumer 2 under all resource
conditions and will eventually be excluded.
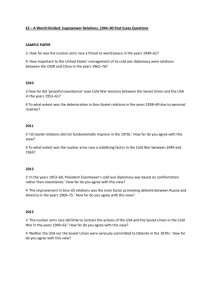
Taken together, the three conditions define a bounded region in
the d1−d2 parameter space (Fig. 1), which gives the necessary but
not sufficient conditions for coexistence; any d1−d2 combination
outside the boundary will always lead to the exclusion of at least
one consumer.
The analytical boundaries derived by Hsu et al. (1978b) provide
an effective means to delimit the parameter space where coexistence is possible. The region of potential coexistence can be
refined even further by allowing for the dynamical behavior of
each consumer when the other consumer is absent. In a simpler
system with the resource and only one of the two consumers, the
limiting dynamics depends on the per capita mortality rate of the
consumer, di, with respect to its functional response (Armstrong
and McGehee, 1980). When di is high, both the resource and the
consumer oscillate with decreasing magnitudes through time and
eventually converge on their equilibrium density, Rin ¼di/(ai−bidi)
and Pin ¼(1−Rin)(1+biRin)/ai. Note that condition 1 ensures that the
equilibrium density of the resource and the consumer exists and
is positive. With decreasing di, the stability of this equilibrium
declines, and the system undergoes a Hopf bifurcation at
di ¼ai(bi−1)/[bi(bi+1)] for bi 41. For di values below this critical
value, the limiting dynamics of the system is oscillation with fixed
period and magnitude, instead of stable equilibrium. When bi≤1,
i.e., when the functional response of the consumer is close to
linear, a biologically meaningful bifurcation point does not exist,
and the system always converges to stable equilibrium.
Consequently, the rectangular region defined by condition
1 can be divided into four sub-regions, assuming for now that
both b1 and b2 are larger than 1 (Fig. 1). In sub-region A, consumer
2 approaches equilibrium when consumer 1 is absent, while
consumer 1 oscillates when consumer 2 is absent. In sub-region
B, both consumers approach stable equilibrium when the other
consumer is absent. In sub-region C, both consumers oscillate. In
sub-region D, consumer 1 approaches stable equilibrium while
consumer 2 oscillates. Sub-regions A and C disappear if b1≤1, while
sub-regions C and D disappear if b2≤1.
Under the assumption that b1 4b2, it can be shown analytically
that the region of potential coexistence defined by the above three
conditions never overlaps with sub-region D (see Appendix). Thus
coexistence cannot be achieved if the more linear consumer (i.e.,
consumer 2) undergoes oscillatory dynamics while the more
nonlinear consumer (i.e., consumer 1) approaches stable equilibrium when each of them is the sole consumer in the system; in
such cases, consumer 1 is always excluded. The remaining three
sub-regions are all traversed by the region of potential coexistence, which implies that coexistence is at least hypothetically
possible in them if the above three analytical conditions are
fulfilled. However, in sub-region B where both consumer species
are at stable equilibrium with the resource (when the other
consumer is absent), the system behaves in a similar way to a
system where both consumers have linear functional responses,
and the competitive exclusion principle applies. Assume that the
two consumers differ in Rn, which is always the case in nature
given that they represent two different species. If a small number
of the consumer with low Rn is added to a system where the other
consumer with high Rn is in equilibrium with the resource, the
added consumer (invader) will increase in abundance, because the
equilibrium resource density is above what is required for it to
maintain zero-growth. However, if conversely a small number of
the consumer with high R* is added to a system where the other
consumer with low R* is in equilibrium with the resource, the
invader will decrease in abundance and be outcompeted by the
resident consumer, because the resource level is too low for it to
grow. This implies that mutual invasion cannot be achieved in subregion B where the limiting dynamics of both consumers are
stable equilibrium. Coexistence can thus only be attained in the
bounded region of potential coexistence defined by the above
three conditions where it traverses sub-regions A or C, which we
will refer to as potential region of coexistence. Note however that
this refined analytical boundary still gives the necessary but not
sufficient conditions for coexistence; competitive outcome for
parameterizations within the bounded region can only be examined numerically.
3.2. The effect of functional response nonlinearity on potential region
of coexistence
Fig. 1. The potential region of coexistence of the modified Armstrong–McGehee
system, defined as coexistence bandwidth. The upper bound corresponds to
condition 2, while the lower bound corresponds to condition 3. The two dashed
lines intercept at the maximal value of d1 and d2 given by condition 1, while the
horizontal and vertical solid lines divide the rectangular region into four subregions differing in the limiting dynamics of the two consumers (see text for
details). Coexistence is only possible within the shaded region between the two
bounds overlapping with sub-regions A and C.
Since we now know the analytical form of the curves defining
the region of potential coexistence, we can directly assess the
effect of b1 and b2 on the parameter space allowing for potential
coexistence. The area of this region can be computed as the
difference of the integrals of the upper and lower bound curves
of the shaded area in Fig. 1; integration is with respect to d1 and
across the range from 0 to a1(b1−1)/[b1(b1+1)] (i.e., the division
Please cite this article as: Xiao, X., Fussmann, G.F., Armstrong–McGehee mechanism revisited: Competitive exclusion and coexistence of
nonlinear consumers. J. Theor. Biol. (2013), http://dx.doi.org/10.1016/j.jtbi.2013.05.025i
X. Xiao, G.F. Fussmann / Journal of Theoretical Biology ∎ (∎∎∎∎) ∎∎∎–∎∎∎
between sub-regions A/C and sub-regions B/D):
Apotential ¼
a1 a2 ðb1 −1Þðb1 þ b2 Þ
2
2ðb1 −b2 Þðb2 þ 1Þb1
þ
a1 a2
ðb1 −b2 Þ2
ln
b1 b2 þ 2b1 −b2
b1 ðb1 þ 1Þ
ð5Þ
Because the analytical boundaries are functions of a1, a2, b1,
and b2, the area of the bounded region Apotential is determined by
the shape of the functional responses of the two consumer species.
While Apotential increases proportionally with a1 and a2, the effect
of the nonlinearity measure of the functional responses, b1 and b2,
is more complex (Fig. 2a). Increasing b2 raises the level of resource
density required for consumer 2 to maintain its population when
consumer 1 is absent, thus reduces the range of d2 that may lead to
coexistence. Moreover, the upper and lower bounds of the potential
coexistence region shift towards each other when b2 approaches
b1, and eventually collapse into a single line when b2 and b1 are
equal, completely eliminating the possibility of coexistence of the
two consumers. Therefore, assuming that b1 4b2, the region of
potential coexistence expands if the difference between the
functional responses of the two species is increased by lowering
the nonlinearity of the functional response of the more linear
species (i.e., b2) while keeping the shape of the functional
response of the more nonlinear species (i.e., b1) constant. This is
consistent with Abrams and Holt’s statement (Abrams and Holt,
2002) that significant differences in functional response are
essential to achieve coexistence. Such effect is most apparent
when b2 is low.
Conversely, if the difference between the two functional
responses is increased by increasing b1 while keeping b2 constant,
5
the potential coexistence region follows a unimodal trajectory, first
expanding then shrinking with increasing b1 values. This behavior
is largely explained by the fact that the range of d1 allowing
coexistence runs from zero to a1(b1−1)/[b1(b1+1)] (i.e., from origin
to the vertical line dividing sub-regions A/C and B/D), which has a
similar unimodal dependence on b1. This leading effect becomes
somewhat attenuated by an enlargement along the vertical dimension of the region of coexistence with increasing b1 (Fig. 3a–c),
causing the dependence of the area of the potential coexistence
region on b1 to be less steep than suggested by the attainable range
of d1. In general, our analysis supports the notion that differences in
the shape of the functional responses promote coexistence; however
it should be added as a disclaimer that increasing the difference does
not necessarily and consistently lead to an expanded coexistence
bandwidth (otherwise the maximum of the plane in Fig. 2a would
need to be at (b1,b2)¼ (10,0)).
3.3. The realized region of coexistence and its dependence on
functional response nonlinearity
As we have previously emphasized, the potential region of
coexistence reflects the necessary yet not the sufficient conditions
for coexistence. The realized region of coexistence, which is
inevitably smaller, was obtained by evaluating grid points for
mutual invasion within the rectangular area consisting of subregions A–D on the d1−d2 phase plane (see Section 2 for details).
The realized coexistence region is similar in shape to the potential
region in that it has a unimodal relationship with b1 and decreases
Fig. 2. The relationship between relative nonlinearity and coexistence. Interactive effect of functional response parameters b1 and b2 on (a) region of potential coexistence,
(b) region of realized coexistence, (c) the ratio between the two, and (d) the proportion of the full rectangular region allowing each consumer to persist when the other
consumer is absent (A+B+C+D) taken up by the region of realized coexistence. a1 and a2 are both fixed at 1, while b1 and b2 vary independently from 0 to 10, with the
restriction that b1 4b2. Note that coexistence cannot occur when both bi values are smaller than 1. In all panels values on the vertical axes were set to zero for parameter
combinations b2≥b1.
Please cite this article as: Xiao, X., Fussmann, G.F., Armstrong–McGehee mechanism revisited: Competitive exclusion and coexistence of
nonlinear consumers. J. Theor. Biol. (2013), http://dx.doi.org/10.1016/j.jtbi.2013.05.025i
6
X. Xiao, G.F. Fussmann / Journal of Theoretical Biology ∎ (∎∎∎∎) ∎∎∎–∎∎∎
Fig. 3. Changes of the potential coexistence region (bounded by dashed lines) and the realized coexistence region (shaded) for gradual changes of relative nonlinearity: (a, b, c) b1
increases while b2 is kept constant; (d, e, f) b2 increases while b1 is kept constant. Sub-regions B and D are omitted since coexistence is never possible in them. Note that because
of the limited number of b1−b2 combinations presented here, the unimodal relationships shown in Fig. 2 may not be detectable. (a) b1=3, b2=1.5, (b) b1=5, b2=1.5, (c) b1=3, b2=1.5,
b1=10, b2=1.5, (d) b1=10, b2=1, (e) b1=10, b2=1.5 and (f) b1=10, b2=3.
monotonically as b2 increases (Fig. 2b). The decline in realized
coexistence with increasing b1 is less steep than that of potential
coexistence (Fig. 2a), implying that the realized region takes up a
larger proportion of the potential region as b1 increases. This
observation is confirmed by the pattern of the ratio between the
realized region and the potential region, which follows a monotonically increasing trajectory as b1 increases (Fig. 2c). Conversely,
the effect of b2 on the ratio is hump-shaped, with the ratio
decreasing with b2 across the larger part of the b2 axis, which is
presumably due to the abrupt appearance of the Hopf bifurcation
for the limiting dynamics of P2 at b2 ¼ 1.
Fig. 3 demonstrates how potential and realized areas of coexistence manifest and change for concrete parameter values.
As b1 increases (Fig. 3a–c), the potential coexistence region first
expands then shrinks, showing the non-monotonic trajectory;
the divergence between the upper and lower bounds of the region,
however, consistently increases. The realized coexistence region,
on the other hand, expands towards the upper bound as b1
increases and takes up a higher proportion of the potential region,
resulting in a less steep decline when b1 is large.
Similarly, changes in b2 affect the coexistence region set by d2
(i.e., the height of the rectangular area consisting of sub-regions A
and C) and the shape of the bounds. However, under the assumption that b1 4b2, increasing b2 diminishes the difference in
nonlinearity of the functional response between the two consumers, leading to convergence instead of divergence of the upper
and lower bounds of the potential coexistence region. Thus, in this
case, the two effects work in synergy as b2 increases, which results
in a monotonically decreasing relationship between the area of the
potential region and b2. Moreover, when b2 is larger than 1,
increasing b2 leads to the expansion of sub-region C with respect
to sub-region A. Because the consumer with stable equilibrium as
its limiting dynamics in sub-region A (i.e., consumer 2) also has a
higher requirement for resource for any parameterization within
the bounded potential region of coexistence in this sub-region, the
other consumer with oscillatory behavior (consumer 1) is always
able to invade (see Eq. (1)); thus the realized region always
matches the lower bound of the potential region in sub-region
A. However, in sub-region C, where both species undergo oscillations as limiting dynamics, the outcome of the invasion is
determined by Eq. (4) instead of by the average resource density
alone. Under these conditions, consumer 1 is not necessarily
capable of invading the simplified system with consumer 2 and
the resource even though R1n is lower than R2n, causing the
realized range to detach from the lower bound of the potential
region in this sub-region. As the proportion of sub-region C
increases with b2 for b2 41, the ratio between the realized and
the potential regions declines.
3.4. The effect of scaling parameters a1 and a2 on coexistence
Both the potential and the realized regions of coexistence
increase with a1 and a2 regardless of the limiting dynamics of
the consumers (Figs. 4 and 5). While the potential region of coexistence scales proportionally with ai (Eq. (5); Figs. 4a and 5a),
numerical analyses suggest that the effect of ai on the realized
region of coexistence is generally not linear, except in the special
case of a2 when the limiting dynamics of consumer 2 with the
resource is stable across the d2 parameter space (i.e., b2≤1; Fig. 4c
and d). Here the linear relationship can be explained by the fact
that in the stable system with the resource and consumer 2, the
equilibrium resource level is R2n ¼ d2/(a2−b2d2), which does not
Please cite this article as: Xiao, X., Fussmann, G.F., Armstrong–McGehee mechanism revisited: Competitive exclusion and coexistence of
nonlinear consumers. J. Theor. Biol. (2013), http://dx.doi.org/10.1016/j.jtbi.2013.05.025i
X. Xiao, G.F. Fussmann / Journal of Theoretical Biology ∎ (∎∎∎∎) ∎∎∎–∎∎∎
7
Fig. 4. Effect of scaling parameters a1 and a2 on (a) region of potential coexistence, (b) region of realized coexistence, (c) the ratio between the two, and (d) the proportion of
the full rectangular region (A+B+C+D) taken up by the region of realized coexistence. b1 and b2 are fixed at 10 and 0, respectively.
change as long as d2 is proportional to a2; thus the invasibility of
such a system with respect to consumer 1 remains unchanged. On
the other hand, when consumer 2 invades the system with the
resource and consumer 1, its long-term growth rate scales linearly
with a2 (assuming again that d2 is proportional to a2; Eq. (4)) with
its sign unaffected, indicating that the invasibility of the system
with respect to consumer 2 does not change either. Therefore in
this special case where the limiting dynamics of consumer 2 is
stable equilibrium, the coexistence bandwidth expands/shrinks
along the d2 axis proportionally to changes in a2.
In all other cases, the realized region of coexistence is not
entirely proportional to changes in a1 or a2. However, it is worth
noting that the deviation from linearity is relatively small. For
instance, the ratio between the realized and potential regions of
coexistence declines from 0.41 to 0.34 with a1 varying from 1 to
5 and a2 fixed at 1 when b1 ¼10 and b2 ¼3 (Fig. 5c), which is much
more subtle compared to the effect of b1 and b2 (Fig. 2).
4. Discussion
It has long been recognized that relative nonlinearity of
consumer functional responses potentially facilitates coexistence
of species that compete for the same resource (Armstrong and
McGehee, 1980; Hsu et al., 1978a, 1978b; Koch, 1974). Most
previous studies have focused on the special and extreme case
where one of two competing species has a linear functional
response while the other has a nonlinear functional response
(Abrams and Holt, 2002; Abrams, 2004; Abrams et al., 2003;
Armstrong and McGehee, 1980; Wilson and Abrams, 2005) (but
see Hsu et al., 1978b; Keener, 1983; Smith, 1982). It is immediately
obvious that involving a linear consumer maximizes the effect
of a coexistence-enhancing mechanism in a two-consumer–oneresource system because, at high resource levels, the linear
consumer will be a superior competitor to any competitor with a
curved, saturating functional response. Yet, in the Armstrong–
McGehee system a number of different mechanisms contribute to
the balance between coexistence and competitive exclusion and
the conditions determining their relative dominance and their
interaction are not always obvious. The objective of our study
was to provide a more general and systematic examination of
the potential for coexistence of two consumer species through
the Armstrong–McGehee mechanism. We considered the more
natural case where both consumer species were allowed to have
saturating functional responses, with varying degrees of relative
nonlinearity.
Under this scenario, three principal consequences of the
relative curvatures (or nonlinearities) of the consumers’ functional
responses play a role in determining coexistence bandwidth in the
system. First, the curvature determines the effectiveness of
resource exploitation and, because resource exploitation translates
to consumer growth rate, competitive superiority at low versus
high resource concentrations. For coexistence to be possible
effectiveness needs to trade off over the range of resource concentrations encountered (i.e., one consumer is better at high
resource concentrations, the other at low ones). Second, nonlinearity opens the door for unstable dynamics. The degree of
functional response curvature determines the location of the
Hopf bifurcation that separates stable from oscillatory dynamics.
In the two-consumer–one-resource system, at least one of the two
Please cite this article as: Xiao, X., Fussmann, G.F., Armstrong–McGehee mechanism revisited: Competitive exclusion and coexistence of
nonlinear consumers. J. Theor. Biol. (2013), http://dx.doi.org/10.1016/j.jtbi.2013.05.025i
8
X. Xiao, G.F. Fussmann / Journal of Theoretical Biology ∎ (∎∎∎∎) ∎∎∎–∎∎∎
Fig. 5. Effect of scaling parameters a1 and a2 on (a) region of potential coexistence, (b) region of realized coexistence, (c) the ratio between the two, and (d) the proportion of
the full rectangular region (A+B+C+D) taken up by the region of realized coexistence. b1 and b2 are fixed at 10 and 3, respectively.
consumers needs to display oscillatory dynamics, or else competitive exclusion will occur. The fact that in our general case
both consumers can cycle adds complexity to the traditional
Armstrong–McGehee system. Finally, curvature of the functional
response also determines the coexistence criteria for each
consumer alone with the resource (i.e., in the absence of the other
consumer). Strong curvature sets more stringent limits on
the amount of mortality that the consumer can sustain without
becoming extinct. Our paper attempted to clarify the conditions
for coexistence as they arise from the interplay of these
mechanisms.
Our results are largely consistent with previous studies
(Abrams and Holt, 2002; Litchman and Klausmeier, 2001) in that
substantial difference in the shape of functional response between
the two species is essential for coexistence. In our framework,
nonlinearity arises from relative increases in the b-values of the
functional responses, which signify that half-saturation occurs at
lower resource concentrations (to be precise, Monod’s halfsaturation ks ¼1/b). In particular, coexistence is drastically reduced
with increasing b2 (index “2” always indicating the less nonlinear
functional response) when b1 is high and b2 is low, i.e., when the
functional response of one of the consumers is very nonlinear
while the functional response of the other consumer is close to
linear (Fig. 2d). On the other hand, a high degree of nonlinearity
indicates long handling time, which reduces the efficiency of the
corresponding consumer and makes it harder for it to persist even
when the other consumer is absent. Thus, when the potential of
coexistence is expressed as the area in the d1−d2 parameter space
where mutual invasion occurs, it follows a unimodal trajectory so
that coexistence is eventually diminished due to the contraction of
the parameter space that can support the more nonlinear consumer (Fig. 2a and b). It is interesting to note that this result also
holds for the classical case in which one of the consumers has a
linear functional response (i.e., b2 ¼0).
We translated results from early analytical studies (Hsu et al.,
1978a, 1978b; also see Smith, 1982) into our analytical framework
and combined them with our analyses of potential for mutual
invasion. This allowed us to define necessary (but not sufficient)
conditions for coexistence on the d1−d2 plane (Fig. 1). Subsequent
numerical simulations showed to what degree these analytical
procedures provide realistic estimates of true patterns of coexistence and competitive exclusion in the two-consumer–oneresource system. On one hand, the analytically and numerically
derived regions of coexistence match quite well in that they
display similar trends of expansion and contraction as the nonlinearity of the two consumers varies (Fig. 2). On the other hand,
the proportion of the potential region that reflects realized
coexistence remains well below 100 percent (Fig. 2c) and the
predictive power of the potential region appears to depend
strongly on the conditions leading to coexistence (Fig. 3). The only
case in which the bounds of the predicted and realized coexistence
fully align is the lower bound in sub-region A (Fig. 3). Because the
limiting dynamics of consumer 2 with the resource is stable in
sub-region A, consumer 1 is able to invade such system provided
that R1n oR2n, which is satisfied by any d1−d2 combination above
the lower bound of the potential region. The condition no longer
holds when the limiting dynamics of both consumers is oscillatory
(sub-region C). Here, neither consumer is able to fully exploit the
periods of high resource levels during the oscillation generated
by the other consumer so that mutual invasion becomes more
Please cite this article as: Xiao, X., Fussmann, G.F., Armstrong–McGehee mechanism revisited: Competitive exclusion and coexistence of
nonlinear consumers. J. Theor. Biol. (2013), http://dx.doi.org/10.1016/j.jtbi.2013.05.025i
X. Xiao, G.F. Fussmann / Journal of Theoretical Biology ∎ (∎∎∎∎) ∎∎∎–∎∎∎
difficult. Consequently, we observe an abrupt transition between
the two sub-regions, with the realized region increasingly detaching from the lower bound the potential region. The upper bound of
the realized region represents the condition for consumer 2 to
successfully invade and is largely influenced by the dynamics of
consumer 1. As the nonlinearity of consumer 1 increases, the
divergence between the potential and realized regions in their
upper bounds diminishes (Fig. 3a–c), presumably due to increasing
dissimilarity between the two consumers which makes it easier
for consumer 2 to invade.
While b1 and b2 represent the nonlinearity of the functional
responses, a1 and a2 act as scaling parameters that determine the
growth rate of the consumers at a given resource level. Our results
show that a1 and a2 mainly affect coexistence bandwidth through
linearly expanding or shrinking the d1−d2 parameter space that
allows each consumer to persist with the resource when the other
consumer is absent (condition 1; Figs. 4 and 5). Though the
realized region of coexistence is not strictly proportional to ai
(Figs. 4b and 5b), the deviation from linearity is small even with
considerable shift in ai (Figs. 4c,d and 5c,d). Moreover, substantial
difference in nonlinearity is required for coexistence regardless of
the a-values. Thus the effect of ai on coexistence, while interesting,
is relatively unimportant compared to the effect of bi.
A condition essential for coexistence (and derived from the
classical Lotka–Volterra framework of competition) is that each
species limit their own growth more than they limit the growth of
other species; in other words, intraspecific competition needs to
be more intense than interspecific competition, thus giving less
abundant species an advantage and preventing competitive exclusion (Chesson, 2000). In the Armstrong–McGehee system with a
nonlinear consumer and a linear consumer competing for the
same self-renewing resource, coexistence is achieved by endogenous fluctuation of the resource and a trade-off between the two
consumers to more efficiently exploit resource at different levels.
This trade-off is akin to the theory of r–K selection (Kneitel and
Chase, 2004; MacArthur and Wilson, 1967), or gleaner-opportunist
trade-off (Litchman and Klausmeier, 2001; Kremer and
Klausmeier, in this issue), where one species benefits from high
reproductive rate in a good environment, while the other species
benefits from high tolerance to harsh environment. We demonstrated in our study that such a mechanism can still operate to
facilitate coexistence in a system with two nonlinear consumers.
However, a species with saturating functional response is neither
as effective at exploiting high resource levels nor at dampening
existing resource fluctuations as a species with linear functional
response. Consequently, the degree to which the Armstrong–
McGehee mechanism can promote coexistence diminishes as the
relative nonlinearity (or the trade-off in life history traits) between
the two species decreases.
Relative nonlinearity as a mechanism promoting coexistence
has a long history in theoretical ecology and there is evidence from
laboratory experiments that environmental fluctuation enhances
coexistence of competitors (e.g., Descamps-Julien and Gonzalez,
2005; Grover, 1988). Yet, empirical evidence that unambiguously
demonstrates operation of Armstrong—McGehee-like mechanisms
in natural systems has yet to be found. The fact that coexistence
bandwidth is greatly reduced when the functional response of both
species deviates from linear suggests that the Armstrong–McGehee
mechanism is unlikely to be detected in most ecological systems
where the intake rates of consumers saturate with resource density.
Moreover, it has been shown that the mechanism has limited
contribution to coexistence when the level of resource partitioning
is high (Abrams and Holt, 2002). We thus presume that relative
nonlinearity is most likely to significantly contribute to coexistence
in systems where competitors have both high niche overlap and
high divergence in life-history traits. While the requirement may
9
sound stringent, it is not uncommon for species in the same guild to
employ drastically different strategies (e.g., Brown and Davidson,
1977; Christensen and Whitham, 1993; Hochberg and Lawton, 1990).
Such systems may be the most promising candidates for the
Armstrong–McGehee mechanism to be detected in nature.
Another way in which relative nonlinearity may contribute to
coexistence is through its conjugate effect with other biotic or
abiotic factors. It has been demonstrated that the effect of relative
nonlinearity can be enhanced by exogenous temporal variation
(Abrams, 2004), predator switching (Kimbrell and Holt, 2005), and
predation (Kuang and Chesson, 2008). Incorporating detailed
biological information such as age structure into the model has
also been shown to interact with relative nonlinearity and generate oscillatory cycles with smaller amplitudes (McCauley et al.,
2008) than they typically occur in the original system where
resource population can drop to extremely low levels and thus
may be too sensitive to perturbation to maintain long-term
persistence (Abrams and Holt, 2002; Upadhyay, 2009). One factor
that is of particular interest is exogenous temporal variation in
resource level, which can promote coexistence when the relative
strength of intra- and inter-specific competition varies with resource
fluctuation (Chesson and Huntly, 1997). This effect has been extensively studied both theoretically (Abrams, 2004; Chesson and Huntly,
1997; Chesson and Warner, 1981; Hsu, 1980) and experimentally
(Descamps-Julien and Gonzalez, 2005; Narwani et al., 2009). Moreover, it has been demonstrated that trade-offs in life-history traits,
which are essential for difference in functional response and endogenous cycles, can arise from divergent evolution induced by a
fluctuating environment (Tachikawa, 2008; Kremer and Klausmeier,
in this issue). When both exogenous and endogenous cycles are
present, however, they can interact in complicated ways with nonadditive effect, where the two cycles may either reinforce for interfere
with each other (Abrams, 2004). It thus remains an open question
how our findings of the effects of relative nonlinearity on coexistence
apply when endogenous fluctuations generated by relative nonlinearity operate in conjugate with other processes in more complex
ecological systems. While it is beyond the scope of our study, this
question should prove a fruitful area for future investigation.
5. Conclusion
We confirmed the validity of the Armstrong–McGehee mechanism
of relative nonlinearity in promoting coexistence for the scenario
of two consumers with nonlinear functional responses. In agreement with previous studies the range in parameter space allowing
coexistence is generally reduced when the difference in curvature
between the two functional responses decreases. This implies that
the mechanism is unlikely to make significant contributions to
coexistence in the absence of other conjugate mechanisms that
occur in more complex food webs. Future studies should explore
the potential of enhanced coexistence through the interaction
of the Armstrong–McGehee mechanism with such conjugate
mechanisms.
Acknowledgments
We thank P.A. Abrams for helpful discussions, and for his
seminal works which inspired our own. C.A. Klausmeier, C.T.
Kremer, and an anonymous reviewer provided helpful comments
during the review process. This research was originally supported
by a McGill University Science Undergraduate Research Award to
X.X. G.F.F. was also supported by an NSERC Discovery Grant.
Please cite this article as: Xiao, X., Fussmann, G.F., Armstrong–McGehee mechanism revisited: Competitive exclusion and coexistence of
nonlinear consumers. J. Theor. Biol. (2013), http://dx.doi.org/10.1016/j.jtbi.2013.05.025i
10
X. Xiao, G.F. Fussmann / Journal of Theoretical Biology ∎ (∎∎∎∎) ∎∎∎–∎∎∎
Appendix A. Supporting information
Supplementary data associated with this article can be found in
the online version at: http://dx.doi.org/10.1016/j.jtbi.2013.05.025.
References
Abrams, P.A., 1999. Is predator-mediated coexistence possible in unstable systems?
Ecology 80, 608–621.
Abrams, P.A., 2004. When does periodic variation in resource growth allow robust
coexistence of competing consumer species? Ecology 85, 372–382.
Abrams, P.A., Brassil, C.E., Holt, R.D., 2003. Dynamics and responses to mortality
rates of competing predators undergoing predator–prey cycles. Theor. Popul.
Biol. 64, 163–176.
Abrams, P.A., Holt, R.D., 2002. The impact of consumer–resource cycles on the
coexistence of competing consumers. Theor. Popul. Biol. 62, 281–295.
Armstrong, R.A., 1976. Fugitive species: experiments with fungi and some theoretical considerations. Ecology 57, 953–963.
Armstrong, R.A., McGehee, R., 1980. Competitive exclusion. Am. Nat. 115, 151–170.
Auguie, B., 2011. gridExtra: functions in Grid graphics.
Brown, J.H., Davidson, D.W., 1977. Competition between seed-eating rodents and
ants in desert ecosystems. Science 196, 880–882.
Chesson, P, Huntly, N., 1997. The roles of harsh and fluctuating conditions in the
dynamics of ecological communities. Am. Nat. 150, 519–553.
Chesson, P.L., Warner, R.R., 1981. Environmental variability promotes coexistence in
lottery competitive systems. Am. Nat. 117, 923–943.
Chesson, P., 2000. Mechanisms of maintenance of species diversity. Annu. Rev. Ecol.
Syst. 31, 343–366.
Christensen, K.M., Whitham, T.G., 1993. Impact of insect herbivores on competition
between birds and mammals for pinyon pine seeds. Ecology 74, 2270–2278.
Descamps-Julien, B., Gonzalez, A., 2005. Stable coexistence in a fluctuating
environment: an experimental demonstration. Ecology 86, 2815–2824.
Grover, J.P., 1988. Dynamics of competition in a variable environment: experiments
with two diatom species. Ecology 69, 408–417.
Hardin, G., 1960. The competitive exclusion principle. Science 131, 1292–1297.
Hochberg, M.E., Lawton, J.H., 1990. Competition between kingdoms. Trends Ecol.
Evol. 5, 367–371.
Holling, C.S., 1959. The components of predation as revealed by a study of smallmammal predation of the European pine sawfly. Can. Entomol. 91, 293–320.
Hsu, S.B., 1980. A competition model for a seasonally fluctuating nutrient. J. Math.
Biol. 9, 115–132.
Hsu, S.B., Hubbell, S.P., Waltman, P., 1978a. A contribution to the theory of
competing predators. Ecol. Monogr. 48, 337–349.
Hsu, S.B., Hubbell, S.P., Waltman, P., 1978b. Competing predators. SIAM J. Appl.
Math. 35, 617–625.
Hutchinson, G.E., 1961. The paradox of the plankton. Am. Nat. 95, 137–145.
Jeschke, J.M., Kopp, M., Tollrian, R., 2004. Consumer-food systems: why type I
functional responses are exclusive to filter feeders. Biol. Rev. 79, 337–349.
Keener, J.P., 1983. Oscillatory coexistence in the chemostat: a codimension two
unfolding. SIAM J. Appl. Math. 43, 1005–1018.
Kimbrell, T., Holt, R.D., 2005. Individual behavior, space and predator evolution
promote persistence in a two-patch system with predator switching. Evol. Ecol.
Res. 7, 53–71.
Kneitel, J.M., Chase, J.M., 2004. Trade-offs in community ecology: linking spatial
scales and species coexistence. Ecol. Lett. 7, 69–80.
Koch, A.L., 1974. Competitive coexistence of two predators utilizing the same prey
under constant environmental conditions. J. Theor. Biol. 44, 387–395.
Kremer, C.T., Klausmeier, C.A. Coexistence in a variable environment: Eco-evolutionary perspectives. Theor. Popul. Biol. http://dx.doi.org/10.1016/j.jtbi.2013.05.
005, in this issue.
Kuang, J.J., Chesson, P., 2008. Predation-competition interactions for seasonally
recruiting species. Am. Nat. 171, E119–33.
Levins, R., 1969. Some demographic and genetic consequences of environmental
heterogeneity for biological control. Bull. Entomol. Soc. Am. 15, 237–240.
Litchman, E., Klausmeier, C.A., 2001. Competition of phytoplankton under fluctuating light. Am. Nat. 157, 170–187.
MacArthur, R.H., Wilson, E.O., 1967. The Theory of Island Biogeography. Princeton
University Press, Princeton, NJ.
McCauley, E., Nelson, W.A., Nisbet, R.M., 2008. Small-amplitude cycles emerge
from stage-structured interactions in Daphnia–algal systems. Nature 455,
1240–1243.
McGehee, R., Armstrong, R.A., 1977. Some mathematical problems concerning the
ecological principle of competitive exclusion. J. Differ. Equations 23, 30–52.
Narwani, A., Berthin, J., Mazumder, A., 2009. Relative importance of endogenous
and exogenous mechanisms in maintaining phytoplankton species diversity.
Ecoscience 16, 429–440.
R Development Core Team, 2011. R: a Language and Environment for Statistical
Computing.
Revolution Analytics, 2011. foreach: Foreach looping construct for R.
Richards, S., Nisbet, R., Wilson, W., Possingham, H., 2000. Grazers and diggers:
exploitation competition and coexistence among foragers with different feeding
strategies on a single resource. Am. Nat. 155, 266–279.
Sarkar, D., 2008. Lattice: Multivariate Data Visualization with R. Springer, New York.
Smith, H.L., 1982. The interaction of steady state and hopf bifurcations in a twopredator–one-prey competition model. SIAM J. Appl. Math. 42, 27–43.
Soetaert, K., Petzoldt, T., Setzer, R.W., 2010. Solving differential equations in R:
package deSolve. J. Stat. Software 33, 1–25.
Tachikawa, M., 2008. Fluctuation induces evolutionary branching in a mathematical
model of ecosystems. PLoS One 3, e3925.
Tierney, L., Rossini, A.J., Li, N., Sevcikova, H., 2011. snow: Simple Network of
Workstations.
Upadhyay, R.K., 2009. Observability of chaos and cycles in ecological systems:
lessons from predator–prey models. Int. J. Bifurcat. Chaos 19, 3169–3234.
Wilson, W.G., Abrams, P.A., 2005. Coexistence of cycling and dispersing consumer
species: Armstrong and McGehee in space. Am. Nat. 165, 193–205.
Please cite this article as: Xiao, X., Fussmann, G.F., Armstrong–McGehee mechanism revisited: Competitive exclusion and coexistence of
nonlinear consumers. J. Theor. Biol. (2013), http://dx.doi.org/10.1016/j.jtbi.2013.05.025i