Lecture 5 The Principle of Competitive Exclusion
advertisement

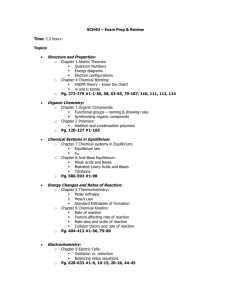
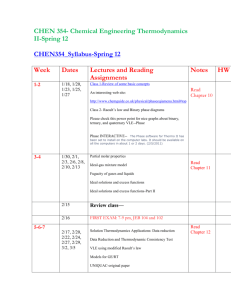
Lecture 5 The Principle of Competitive Exclusion Reading: The treatment here was inspired by that in Section 4.11 of Martin Braun’s (terrific) book Martin Braun (1993), Di↵erential Equations and Their Applications, Vol 11 in Springer Texts in Applied Mathematics, ISBN 0-387-97894-1, but this is a much-studied problem and similar material appears in Section 3.5 of Murray’s book James D. Murray (2002), Mathematical Biology I: An introduction, 3rd edition, Springer Interdisciplinary Applied Mathematics Series, Vol. 17, ISBN 0-387-95223-2. Available online at http://bit.ly/OnlineMurrayVol1. and Section 2.5 of Britton’s Nicholas F. Britton (2003), Essential Mathematical Biology, Springer Undergraduate Mathematics Series, ISBN 978-85233-536-6. 5.1 Two competing species This part of the course involves an ecological model for two species that compete for a common resource, for example, two species of rats infesting the same building. The Principle of Competitive Exclusion says that typically only one of the two species can survive indefinitely, while the other will be driven to extinction. Working out when and why this principle holds will also provide an example of rigorous phase-plane analysis. We’ll study a model that involves two kinds of beings that interact by competing for something—food, say, or nesting sites—whose availability is limited. We’ll refer 5.1 to the two populations as N1 (t) and N2 (t) and imagine them to evolve according to1 ✓ ◆ dN1 N 1 + a1 N 2 = r 1 N1 1 dt K1 ✓ ◆ dN2 N 2 + a2 N 1 = r 2 N2 1 . (5.1) dt K2 Both ODEs are modified versions of the logistic growth law ✓ ◆ dN N = rN 1 , dt K so the growth rates rj (which have units of 1/time), the carrying capacities Kj (units of “beasts”) and the dimensionless coefficients aj are all positive real numbers. The novelty here is that where the logistic law for N1 (t) would include a populationlimiting term of the form N1 /K1 , the system (5.1) has (N1 + a1 N2 )/K1 instead. That is, members of the second species appear in dN1 /dt like extra members of the first species and, up to a constant of proportionality a1 , limit the growth of N1 accordingly. The motivation behind the model in Eqn. (5.1) is especially clear when the limiting resource is food. Suppose that N1 represents the population of the larger animals, and N2 that of the smaller. If one of the smaller animals needs half as much food as one of the larger ones, then we’d set: • a1 = 1/2 as each animal of species two appear like half a animal from species one; • a2 = 2 as each animal of species one eats as much food as two animals from species two; • K2 = 2K1 as the environment can support twice as many of the smaller beast. 5.1.1 Dimensionless form As usually, the first thing we’ll do is reformulate the problem in terms of dimensionless variables. Although there are many ways to do this, the following choices N1 N2 u= , v= and ⌧ = r1 t K1 K2 are certainly very natural: we scale the populations by their carrying capacities and use the intrinsic growth rate r1 to define a dimensionless time. Familiar calculations (see, e.g., Section 1.4) then lead to the system du dv = f (u, v) = u (1 u ↵v) and = g(u, v) = ⇢v (1 v u) , (5.2) d⌧ d⌧ where ✓ ◆ ✓ ◆ K2 K1 r2 ↵ = a1 , = a2 and ⇢ = . K1 K2 r1 This reduces the original set of six parameters down to three and, as we’ll see, the long-term behaviour of the system depends on only two of them, ↵ and . 1 The notation in Eqn. (5.1) is close, but not identical, to that used in Murray’s Section 3.5. 5.2 v v v (0,1/α ) (0,1/α ) α≤β<1 α<1<β 1<α≤β (0,1) (0,1) (0,1) (u* , v*) (0,0) (0,1/α ) (1,0) (1/β,0) u (0,0) (1/β,0) (1,0) u (u* , v* ) (0,0) (1/β,0) (1,0) u Figure 5.1: The null clines for Eqn. (5.2): du/d⌧ = 0 on the blue curves, while dv/d⌧ = 0 on the red ones. The equilibria at (0, 0), (1, 0) and (0, 1) are always present, but the one with u? > 0 and v? > 0 is present only in cases of weak (↵ < 1) or strong (1 < ↵ ) competition. 5.1.2 Null clines and equilibria When analysing systems such as (5.2) it’s often instructive to sketch the null clines, which are curves along which one or the other of the time derivatives vanish. Thus for the model of Eqn. (5.2) there are two sets of null clines, one of which is defined by du = 0 ) u(1 u ↵v) = 0 ) u = 0 or (1 u ↵v) = 0. d⌧ The latter of the two conditions defines a line on the (u, v) plane and one can sketch a line by finding two points on it. Here (0, 1/↵) and (1, 0) are a suitable pair, so the du/d⌧ = 0 null cline is the union of the v axis (the set u = 0) and the line that passes through (0, 1/↵) and (1, 0). Very similar calculations show that the other null cline is defined by dv = 0 ) ⇢v(1 d⌧ v u) = 0 ) v = 0 or (1 v u) = 0, so this null cline is the union of the u axis and the line passing through (0, 1) and (1/ , 0). Both sets of null clines are illustrated in Figure 5.1. Equilibria occur at places where both derivatives are zero and so appear in the phase portrait as places where the dv/d⌧ and du/d⌧ null clines intersect. 5.2 Analysis of the model The main question one wants to ask about the model in Eqn. (5.2) concerns longterm dynamics: Can the two species coexist indefinitely or will one of them eventually go extinct? This turns out to be closely related to the number of equilibria the system has and the stability types of those equilibria. I’ll begin, then, by working out the community matrix, which is @u f @v f 1 2u ↵v ↵u A = = . (5.3) @ u g @v g ⇢ v ⇢(1 2v u) 5.3 (u? , v? ) Linearisation (0, 0) (1, 0) (0, 1) 1 0 0 ⇢ 1 ↵ both positive unstable node < 1) or > 1) saddle or stable node one (when ↵ < 1) or two (when ↵ > 1) negative 0 ⇢ ⇢ Classification one (when two (when negative 1 ↵ 0 ⇢(1 ) Eigenvalues saddle or stable node Table 5.1: The three equilibria of (5.2) that are always present along with the linearisation (5.3) evaluated at (u? , v? ) and the resulting classifications. Whatever values the parameters of the system (5.2) have, there are always three equilibria—at (u? , v? ) = (0, 0), (0, 1) and (1, 0)—that correspond to extinction of one or both of the species. The community matrices at these points and their corresponding stability types are summarised in Table 5.1. 5.2.1 Coexistence: equilibria with u? , v? > 0 There may also be one more equilibrium that represents coexistence of the two species and so has positive populations for both. It occurs when the null clines (1 u ↵v) = 0 and (1 v u) = 0 intersect in the region where u? > 0 and v? > 0. These lines can be rewritten in the following way 1 u v= and v=1 u ↵ and as they must intersect at the equilibrium (u? , v? ), we have 1 u? ↵ = v? = 1 u? or 1 u? = ↵ ↵ u? so u? = which means that the equilibrium will be ✓ ◆ 1 ↵ 1 (u? , v? ) = , . 1 ↵ 1 ↵ 1 ↵ . 1 ↵ (5.4) One could check the stability of this equilibrium by simply plugging the expressions from (5.4) into the community matrix (5.3) and hacking away, but this involves needless struggle. In this case we know that 1 u? ↵v? = 0 so 5.4 1 2u? ↵v? = u? and similarly 1 v? u? = 0 so ⇢(1 2v? u? ) = ⇢v? . Thus at the equilibrium given by (5.4) we have the simpler community matrix 1 2u? ↵v? ↵u? u? ↵u? A = = . (5.5) ⇢ v? ⇢(1 2v? u? ) ⇢ v? ⇢v? This form of the linearisation makes it much easier to work out the stability type of the equilibrium. We have Tr(A) = u? ⇢v? < 0, and det(A) = ⇢u? v? ⇢↵ u? v? = ⇢u? v? (1 ↵ ) whose sign is the same as that of (1 ↵ ). This means that stable coexistence (a stable equilibrium with both u? and v? positive) is possible only when ↵ < 1, which makes good ecological sense, as in this case the the e↵ect of each species on the other is small or, equivalently, they compete only weakly. In the case of strong competition—manifested here by ↵ > 1, or equivalently, (1 ↵ ) < 0—there is an equilibrium where both populations are positive, but it’s a saddle and so is unstable. 5.2.2 Three parameter regimes Our problem thus has three interesting parameter regimes: they’re illustrated in Figure 5.1. Note that we can assume, without loss of generality, that ↵ as we can always swap the roles of u and v to make this true. (i) ↵ < 1. This is sometimes called the weak competition regime in that the influence of the two species on each other is modest: each experiences the impact of an individual of the other as something less than a whole (dimensionless) animal. In this case coexistence is possible (there is an equilibrium with both u? and v? positive) and it is stable. Further, if ↵, ⌧ 1 one can see that the equilibrium in Eqn. (5.4) has u? ⇡ 1 ⇡ v ? which means that the populations are essentially the same as they would be if the other species were absent. This makes good ecological sense: very weak competition has only a very small e↵ect. (ii) ↵ < 1 < . In this case coexistence is not possible: the equilibrium given by the formula in Eqn. (5.4) involves at least one negative population. Further, the equilibrium (1, 0) is a stable node, while the equilibrium at (0, 1) is a saddle. As we will see below, this implies that almost every initial condition leads to the extinction of species two. This makes ecological sense in that species two has only a modest detrimental e↵ect (↵ < 1) on species one, while species one has a large detrimental e↵ect ( > 1) on species two. 5.5 (iii) 1 < ↵ , the strong competition regime. Coexistence is once again possible, but as (1 ↵ ) < 0 the analysis in the previous section shows that the corresponding equilibrium is unstable, while those at (0, 1) and (1, 0) are both stable. In this case one species will always drive the other to extinction, but the identity of the winner depends in detail on the initial data. Finally, careful readers will have noticed that that I have skipped all the parameter regimes where one, or both, of ↵ and equal one. That’s because these are rather special cases: • If exactly one of ↵ and is one, the equilibrium (5.4) coincides with either the one at (0, 1) or the one at (1, 0). Linear stability analysis then is then uninformative and one needs more elaborate approaches. • If ↵ = = 1 then the two species are indistinguishable as far as the model is concerned: animals feel the impact of members of the opposite species in exactly the same way as they feel that from members of their own. In this case the whole line segment connecting (0, 1) and (1, 0) consists of equilibria and linear stability analysis is again uninformative. 5.2.3 A brief mathematical interlude We’ll conclude our study of the Principle of Competitive Exclusion by working through a rigorous argument that establishes the claims made about the regime ↵ < 1 < , but before we can do this we need two lemmas from Braun. They sometimes enable one to make strong statements about the long-time behaviour of the solutions of ODEs, even when one cannot solve the equations explicitly. As in Section 4.2.2, these results apply to systems of ODEs of the form ẋ = f (x), where x 2 Rn and f : Rn ! Rn , where 2 3 f1 (x1 , . . . , xn ) 6 f2 (x1 , . . . , xn ) 7 6 7 f (x) = 6 (5.6) 7 .. 4 5 . fn (x1 , . . . , xn ) with fj : Rn ! R. Lemma 5.1 (Bounded functions and limits). Let g(t) be a monotonic increasing (decreasing) function of time g(t) : [t0 , 1) ! R with g(t) c (respectively, g(t) c) for some constant c 2 R. Then the limit g? = lim g(t) t!1 exists and satisfies g? c (respectively, g? c). Lemma 5.2 (Asymptotic limits are equilibria). If x(t) is a solution to a system of ODEs such as that in Eqn. (5.6) and lim x(t) = x? t!1 then x? must be an equilibrium. That is, f (x? ) = 0 which is equivalent to fj (x? ) = 0 for all 1 j n. 5.6 v (0,1/α ) (0,1) C B A (0,0) (1/β,0) (1,0) u Figure 5.2: The phase portrait for the case ↵ < 1 < : the positive quadrant (where all ecologically-sensible solutions lie) is divided up into three regions, as shown. The arrows on the border of region B are meant to indicate the direction that trajectories starting on the border will flow, but don’t indicate the speed of the flow. 5.2.4 Rigorous treatment of the case where ↵ < 1 < Our aim here will be to establish Proposition 5.3. Suppose ↵ < 1 < in Eqn. (5.2). Then if u(0) > 0 and v(0) we can conclude lim (u(⌧ ), v(⌧ )) = (1, 0). 0 ⌧ !1 That is, the second species is driven to extinction whenever some animals of the first species are present. Our proof will involve the three regions A, B and C illustrated in Figure 5.2 and we will establish each of the following: (a) Any solution (u(⌧ ), v(⌧ )) whose initial condition (u(0), v(0)) lies in region A must eventually leave the region. (b) If a solution (u(⌧ ), v(⌧ )) lies within region B at some time ⌧ = ⌧0 , then (u(⌧ ), v(⌧ )) will remain in the B for all ⌧ ⌧0 (B is a so-called trapping region). Further, any solution that remains within B for all times ⌧ ⌧0 must have lim⌧ !1 (u(⌧ ), v(⌧ )) = (1, 0). (c) Finally, any solution (u(⌧ ), v(⌧ )) whose initial condition lies in region C must eventually either • leave C and enter B or • remain in C for all time and have lim⌧ !1 (u(⌧ ), v(⌧ )) = (1, 0). The regions A, B, and C are bounded by segments of null clines, but don’t have any null clines in their interiors. This means that the functions f (u, v) = du/d⌧ and g(u, v) = dv/d⌧ are non-zero inside the regions and so a simple argument based on the Intermediate Value Theorem says that these functions can’t change sign inside 5.7 Region du d⌧ dv d⌧ A B C + + + Table 5.2: The signs of the derivatives in the regions illustrated in Figure 5.2 A, B or C and so the derivatives have a definite sign (either positive or negative) everywhere in their interiors. This observation is the cornerstone of our proof and so I’ve tabulated the signs of the derivatives in Table 5.2. In the arguments below I’ll make frequent use of the term trajectory: it means a curve traced out by a solution (u(⌧ ), v(⌧ )) and a key tool in phase plane analysis is the observation that trajectories can’t intersect: this follows from the uniqueness of solutions to ODEs. Part (a): trajectories leave A We’ll prove by contradiction that solutions starting in A must leave the region. Assume there’s some initial condition (u0 , v0 ) 2 A whose corresponding solution (u(⌧ ), v(⌧ )) remains in A forever. Since we know that du/d⌧ > 0 throughout A we can conclude that u(⌧ ) is a monotone increasing function and, as the region is bounded (if (u, v) 2 A then 0 < u < 1/ and 0 < v < 1) we have further that u(⌧ ) is a bounded monotone function. Lemma 5.1 thus applies and says that lim⌧ !1 u(⌧ ) exists and lies within the limits imposed by the boundaries of A. A very similar argument then tells us that lim⌧ !1 v(⌧ ) exists too. Further, we know lim⌧ !1 (u(⌧ ), v(⌧ )) lies within A or on its boundary. But then, as lim⌧ !1 (u(⌧ ), v(⌧ )) exists, we know from Lemma 5.2 that the limit must be an equilibrium of (5.2). There is only one equilibrium point lying in A or on its boundary—the one at (1, 0)—and that’s a saddle. The Hartman-Grobman Theorem thus assures us that almost all nearby trajectories flow away from the saddle. The exceptions are the trajectories that flow along the v-axis, but our assumption that u(0) > 0 rules these possibilities out. Thus we have reached a contradiction: a trajectory that stays in A forever must converge to an equilibrium point, but the only one accessible from A is unstable and the solutions that interest us can’t converge to it. The only way out of this impasse is to conclude that solutions don’t stay in A forever, but instead leave in finite time. This means that they must cross one of A’s boundaries. They can’t go through the ones with u = 0 or v = 0 because those two are segments of trajectories and we know that trajectories can’t intersect. Thus solutions that begin in A must exit by hitting the boundary between A and B. And once they hit this boundary, they cross into B as we know that du/d⌧ > 0 all along it. 5.8 Part (b): trajectories get trapped in B and converge to (1, 0) Begin by imagining that at some time ⌧0 0 we know that (u(⌧0 ), v(⌧0 )) is in the interior of region B. Now suppose, for contradiction, that at some later time T > ⌧0 the solution (u(T ), v(T )) is outside B. Then there would need to have been an earlier moment—call it ⌧1 , with ⌧0 < ⌧1 < T —when the trajectory (u(⌧ ), v(⌧ )) crosses the boundary2 of B. But this is impossible. As we saw in the previous part of the argument: no trajectory can leave B through those parts of its boundary that coincide with the u and v axes, as these are segments of other trajectories. Thus a trajectory exiting B would need to flow out through either the boundary between regions A and B or the boundary between B and C. But in both cases, the ODEs are such that trajectories that start on B’s boundary flow inwards, as is illustrated in Figure 5.2. The boundary between regions A and B is a piece of the dv/d⌧ = 0 null cline and so trajectories starting there have, initially, du/d⌧ > 0 and dv/d⌧ = 0 and flow horizontally to the right. Similarly, the boundary between regions B and C is part of the du/d⌧ = 0 null cline and so trajectories starting there have, initially, du/d⌧ = 0 and dv/d⌧ < 0, so flow vertically downward. These observations provide the contradiction we sought: we assumed that a trajectory that began in B could eventually escape, but then we established that it is impossible for any trajectory to cross B’s boundary from the inside to the outside. A trajectory that starts or arrives in B is thus trapped there forever after. Table 5.2 tells us that such a trapped trajectory has du/d⌧ > 0 and dv/d⌧ < 0, so u(⌧ ) is a bounded, monotone increasing function while v(⌧ ) is bounded and monotone decreasing. This means that both have limits and, as in the previous section, lim⌧ !1 (u(⌧ ), v(⌧ )) must be an equilibrium. As the Hartman-Grobman Theorem rules out the one at (0, 1), the only remaining possibility is (u? , v? ) = (1, 0). Part (c): trajectories that start in C converge to (1, 0) In region C we know both du/d⌧ < 0 and dv/d⌧ < 0 and, as u(⌧ ) 0 and v(⌧ ) 0, both are bounded monotone decreasing functions. If a trajectory remains in C forever (and some certainly do) then now-familiar arguments imply that lim (u(⌧ ), v(⌧ )) = (1, 0). ⌧ !1 If, on the other hand, the trajectory eventually leaves C then it must pass through the boundary with region B and become trapped and then, as we proved in Part (b), converge to (1, 0). 5.3 Afterword It’s possible to make too much of the Principle of Competitive Exclusion. The arguments we’ve just made depend very strongly on properties of curves in the plane 2 The sophisticated reader will recognize that we are, implicitly, invoking the Jordan Curve Theorem here. 5.9 and won’t apply when three or more competing species are present, though similar results are available. Also, experimental evidence suggests that while Eqn. (5.1) provides a good model for some forms of interspecific conflict, it doesn’t work for all, not even when the two species are very similar: Francisco Ayala and his collaborators report3 on extensive experiments involving pairs of species of Drosophila (fruit flies) and find that in most cases alternative models involving equations of the form ✓ ◆ (Nj + ↵jk Nk + j Nj2 ) dNj = r j Nj 1 dt Kj or " dNj = r j Nj 1 dt ✓ Nj Kj ◆✓ j ↵jk ✓ Nk Kj ◆# with ✓j > 0 provided better fits to the data. The use of Eqn. (5.1) to model economic or ideological competition requires a very strenuous leap of the imagination. 3 Francisco J. Ayala, Michael E. Gilpin and Joan G. Ehrenfeld (1973), Competition between species: Theoretical models and experimental tests, Theoretical Population Biology, 4(3):331–356. DOI 10.1016/0040-5809(73)90014-2 5.10