M. Hazenwinkel, ed., Elsevier ( The Netherlands)
advertisement
")
CANONICAL DECOMPOSITIONS AND INVARIANTS FOR DATA ANALYSIS
MARLOS VIANA
UNIVERSITY OF ILLINOIS AT CHICAGO EYE CENTER
Contents
1. Introduction
1
2. A general principle of interpretability
2
3. Symmetry studies
3
4. Data indexed by S3
7
The canonical projections
9
Interpreting the regular invariants
9
A set of bases for the regular invariants
10
The invariant basis
11
A numerical example
12
5. Data indexed by S4
13
The partition λ = 22
16
6. Comments and summary
16
Appendix A.
18
References
20
Abstract. Data analytic applications of the canonical decomposition theorem are illustrated in the study
of data indexed by groups of permutations. The concept of canonical invariants is discussed and interpreted
in studies of data indexed by the permutation of three and four symbols. It is shown that the invariants can
be obtained directly from the (finite group) Fourier transforms for the data.
1. Introduction
Riley et al. (2002) observe that
If a physical system is such that after application of a particular symmetry transformation the final system is indistinguishable from the original system then its behavior, and hence the functions that describe its behavior, must have the corresponding
property of invariance when subject to the same transformations.
From Ch.8 in The Handbook of Algebra, Vol.6, (2009) M. Hazenwinkel, ed., Elsevier ( The Netherlands) pp 565-584.
1
2
MARLOS VIANA UNIVERSITY OF ILLINOIS AT CHICAGO EYE CENTER
The study of these transformations is a study of the symmetries of the system. More generally,
as Bacry (1967) shows, the study of the symmetries of a physical system often suggests the study
of the symmetries of certain physical laws and theories, and not infrequently, leads to symmetryrelated principles in the form of conservation laws. In this Chapter we propose a data analytic
interpretation of these principles.
To illustrate, consider the group G = {1, v, h, o} of vertical (v) and horizontal (h) line reflections,
point reflection (o) and the identity (1) planar transformations under composition of functions. Its
multiplication table
∗ 1 v h o
1 1 v h o
(1.1)
v v 1 o h
h h o 1 v
o o h v 1
shows that G is Abelian. Of course, these are the automorphisms of a rectangle. Examples of data
indexed by these transformations appear, for example, in Viana (2006) and Viana (2008, Ch.1) .
Indicating by {x1 , xv , xh , xo } the data indexed by these transformations, it then follows that the
four scalar quantities
I1 = x1 +xo +xv +xh , Iv = x1 +xv −xo −xh , Ih = x1 +xh −xo −xv , Io = x1 +xo −xv −xh , (1.2)
are the canonical invariants of the data space under the given group action. These data summaries
vary, as a result of the underlying group action, only up to companion points in the same invariant
subspace. For example, the invariant x1 + xo − xv − xh is such that
xt∗1 + xt∗o − xt∗v − xt∗h = ±(x1 + xo − xv − xh )
for all t ∈ G.
Ideally, then, it is of interest to interpret and describe both the underlying group actions and the
resulting invariants.
2. A general principle of interpretability
As a general principle, group actions can be interpreted as degrees of arbitrariness, or irrelevance,
that are chosen upon the labels and need to be resolved. For example, it can be shown that the
sum and n − 1 sets of pairwise comparisons in a sample of size n are the invariants that result when
the assignment of observations to the labels {1, 2, . . . , n} is (determined to be) arbitrary in such
way that its degree of arbitrariness amounts to shuffling the labels in all possible n! ways. These
invariants, in dimensions of 1 and n − 1 respectively, appear in the practice of data analysis as the
sample mean its standard deviation. If, however, the data are labeled by n equally spaced points
along a circle, and the degree of arbitrariness is now restricted to shuffling the labels according to
CANONICAL DECOMPOSITIONS AND INVARIANTS FOR DATA ANALYSIS
3
the n cyclic permutations, then the resulting invariants are the n linear combinations of the original
data, with coefficients the n sets of Fourier coefficients cos(2πjk/n)+i sin(2πjk/n), j, k = 0, . . ., n−1.
Appying this principle to the present example, the invariants in (1.2) can be characterized as
those data that should be retained when the arbitrariness of where is left (right) and where is
up (down) is resolved. This degree of arbitrariness can be identified by studing the group action,
defined by the multiplication table in (1.1) , each line of which relabels what is up-down, leftright. We may refer to it as planar orientation and then say that the pairwise comparisons in (1.2)
are the invariants of planar orientation. For example, x1 + xo − xv − xh gives a one-dimensional
subspace regardless of the planar orientation then. Equivalently, it compares the responses to point
symmetry against the combined responses of vertical and horizontal responses, regardless of the
planar orientation.
In this example, all invariants were in dimension of one, adding to the dimension (4) of the
original vector space for the data indexed by the elements of G. The simplest example is given by
the invariants x` ± xr associated with bilateral, say, left (`) and right (r) measurements, determined
by the identity transformation and the transposition, indicated by (r`), of left and right.
When an invariant is derived from a regular group action (the group acting on itself by multiplication on the right or on the left) we call it a regular invariant. In the next sections the data analytic
methods of symmetry studies will be applied to determine and interpret the regular invariants in
higher dimensions.
3. Symmetry studies
Methods of representation theory can be systematically applied in the analysis of data indexed
by a set of labels where a group action can be defined and often justified by an experimental
context. While group representations provide the connection between the labels and the data
space, the canonical decomposition theorem, reducing the identity matrix in the data space as
a sum of algebraically orthogonal projections, provides the conditions with which the statistical
theory of quadratic forms can be formulated to study the resulting decomposition of the sum of
squares, or analysis of variance. The study of these projections also lead to useful summaries of
the data in the form of canonical invariants, which can be used as descriptive tools or interpreted
for further inference in the analysis of variance context.
These basic elements constitute the core of all symmetry studies as introduced by the author in
Viana (2008), where a detailed introduction to a number of data analytical applications is described.
The algebraic foundations for this chapter are also summarized in Viana (2008).
Specifically, every symmetry study includes the identification of:
(1) A set V of labels with v elements;
4
MARLOS VIANA UNIVERSITY OF ILLINOIS AT CHICAGO EYE CENTER
(2) The observed data x defined in a linear subspace V ⊂ Rv and indexed by those labels (the
structured data);
(3) A rule or group action, with which the symmetry transformations in G are applied to V;
(4) The classes and multiplicities of the resulting elementary orbits, subsets of V, where G acts
transitively;
(5) The resulting linear representations of these actions in the corresponding data vector subspaces;
(6) The canonical projection matrices Pχ indexed by the irreducible characters χ of G;
(7) The canonical invariants Pχ x on the data x, and their interpretations;
(8) A statistical analysis of the canonical invariants and, if applicable, their analysis of variance
P
P
x0 x = χ x0 Pχx based on the canonical decomposition I = χ Pχ of the identity operator
in the data subspaces.
When necessary, these canonical projections may be grouped together to describe the V. SpecifiP
cally, if there are qλ orbits of type λ, each with oλ elements, classifying the v = λ qλ oλ points in
V then, for each class of orbits with vλ = qλ oλ points, the identity matrix in V reduces according
to Ivλ = Pλ1 + Pλ2 + . . ., where Pλj is the canonical projection constructed with qλ copies of the
canonical projection Pjλ in the vector space associated with the elementary orbits of type λ, and
indexed by the irreducible representations j = 1, 2, . . . of the underlying group G. The reduction
in the original space V is then Iv = Diag(. . . , Ivλ , . . .), with as many components as the different
types of orbits identified by the action of G on V.
To illustrate, consider the set V = {uu, yy, uy, yu} of binary sequences in length of two, or,
equivalently, the set of all mappings s from {1, 2} into {u, y}, so that ϕ1 (τ, s) = sτ −1 ,
τ −1
s
ϕ1 : {1, 2} −−→ {1, 2} −
→ {u, y}, s ∈ V, τ ∈ S2 = {1, (12)},
(3.1)
and ϕ2 (σ, s) = σs,
s
σ
ϕ2 : {1, 2} −
→ {u, y} −
→ {u, y}, s ∈ V, σ ∈ S2 = {1, (uy)},
(3.2)
are actions of S2 on V. Action ϕ1 classifies the sequences up to permutations of the positions {1, 2}
of the letters, whereas ϕ2 classifies the sequences up to permutations of the symbols {u, y}. Action
ϕ1 generates 3 orbits {uu}, {yy} and {uy, yu} and ϕ2 generates 2 orbits, {uu, yy} and {uy, yu}.
In the position symmetry case, the representation is isomorphic to
#
#
"
"
1 0
0 1
), t ≡ (12),
), ξt = Diag(1, 1,
ξ1 = Diag(1, 1,
1 0
0 1
taking values in GL(R4 ). Equivalently, writing V = R4 , we observe that the ξ determines the
decomposition
V = W1 ⊕ W2 ⊕ W3 ,
CANONICAL DECOMPOSITIONS AND INVARIANTS FOR DATA ANALYSIS
5
where the stable subspaces W1 and W2 reduce isomorphically as a subspace U1 associated with the
unit representation and W3 reduces as the sum of an isomorphic copy of U1 and a subspace USgn
associated with the sign representation. Therefore,
V = U1 ⊕ U1 ⊕ U1 ⊕ USgn = V1 ⊕ VSgn,
|
{z
}
(3.3)
V1
showing a decomposition of V into a direct sum of the irreducible representations of S2 in which
we collected together the isomorphic copies. This is the canonical decomposition of V. Next, to
construct projections P1 and PSgn of V on the irreducible subspaces V1 and VSgn define
X
χβ (τ )ξτ /g,
Pβ = nβ
τ ∈G
where χβ is the irreducible character of the irreducible representation β of G with |G| = g elements,
and nβ its dimension. In the present case (G = S2 ), β ∈ {1, Sgn} with corresponding characters
χ1 ≡ 1 and χSgn = Sgnτ , so that P1 = (ξ1 + ξt)/2 and PSgn = (ξ1 − ξt )/2. When the projections
are evaluated relative to a basis of V = V1 ⊕ VSgn on which
ξτ = Diag(I3 ⊗ 1τ , Sgnτ ),
where In indicates the n × n identity matrix, we obtain
1
P1 = [Diag(I3 ⊗ 1, 1) + Diag(I3 ⊗ 1, −1)] = Diag(I3 ⊗ 1, 0) = Diag(1, 1, 1, 0),
2
and
1
[Diag(I3 ⊗ 1, 1) − Diag(I3 ⊗ 1, −1)] = Diag(I3 ⊗ 0, 1) = Diag(0, 0, 0, 1).
2
2
It then follows that (1) P12 = P1 , PSgn
= PSgn; (2) P1 PSgn = PSgn P1 = 0 and (3) I4 = P1 + PSgn,
PSgn =
so that Pβ is a projection on a subspace isomorphic to Vβ . These properties remain valid if Pβ is
evaluated relative to any representation Mξτ M−1 equivalent to ξ. In this case, Pβ transforms as
MPβ M−1 and (1),(2) and (3) remain unchanged. For example, relative to the basis for V indexed
by {uu, yy, uy, yu}, we have
P1 = Diag(1, 1, A2); PSgn = Diag(0, 0, Q2),
where An indicates the n × n matrix with all entries equal to 1/n and Qn = In − An .
Similarly, in the letter symmetry case, ξ is given by
"
# "
#
0 1
0 1
ξ1 = Diag(I2 , I2 ), ξt = Diag(
),
)),
1 0
1 0
so that now V = W1 ⊕ W2 and in each one of these two stable subspaces ξ reduces isomorphically
as the sum of the unit and the sign representations. Collecting the isomorphic copies of the
6
MARLOS VIANA UNIVERSITY OF ILLINOIS AT CHICAGO EYE CENTER
corresponding irreducible subspaces U1 and USgn we have then
V = U1 ⊕ U1 ⊕ USgn ⊕ USgn ,
| {z } |
{z
}
V1
VSgn
which is the canonical decomposition of V, with corresponding projections P1 = (ξ1 + ξt )/2 and
PSgn = (ξ1 − ξt )/2. When these matrices are evaluated relative to a basis of V = V1 ⊕ VSgn on which
ξτ = Diag(I2 ⊗ 1τ , I2 ⊗ Sgnτ )
the result is
P1 =
1
[Diag(I2 ⊗ 1, I2 ⊗ 1) + Diag(I2 ⊗ 1, I2 ⊗ −1)] = Diag(I2 ⊗ 1, I2 ⊗ 0) = Diag(1, 1, 0, 0),
2
and
PSgn =
1
[Diag(I2 ⊗ 1, I2 ⊗ 1) − Diag(I2 ⊗ 1, I2 ⊗ −1)] = Diag(I2 ⊗ 0, I2 ⊗ 1) = Diag(0, 0, 1, 1).
2
It then follows that Pβ is a projection on a subspace isomorphic to Vβ and, regardless of the chosen
2
basis for V, P12 = P1 , PSgn
= PSgn ; P1 PSgn = PSgn P1 = 0 and I4 = P1 + PSgn. In particular,
P1 = Diag(A2 , A2 ), PSgn = Diag(Q2 , Q2 ).
The arguments illustrated in the above example leads to the proof of following result (Viana, 2008;
Serre, 1977):
Theorem 3.1 (Canonical Decomposition). Let ρ be a linear representation of G into GL(V),
ρ1 , . . . , ρh the distinct non-isomorphic irreducible representations of G with g elements, with corresponding characters χ1 , . . . , χh and dimensions n1 , . . . , nh . Then,
X
χi (τ )ρτ /g,
Pi = ni
τ ∈G
is a projection of V onto a subspace Vi , sum of mi isomorphic copies of the irreducible subspaces
P
associated with ρi , i = 1, . . ., h. Moreover, PiPj = 0, for i 6= j, Pi2 = Pi and i Pi = Iv , where
P
v = dim V = hi=1 mi ni .
The Fourier inverse formula. In several experiments, however, the data are naturally indexed by
G in itself, so that V = G. In this case, there is a one-to-one correspondence
X
X
b
x(β) =
xτ βτ ←→ xτ =
nβ tr [βτ −1 b
x(β)],
τ ∈G
b
β∈G
between the experimental data {xτ , τ ∈ G} and the Fourier transforms x
b(β) over the irreducible
b indicates the set of all
representations β of G, in dimension of nβ , where in the above expression G
irreducible representations of G. Observe, in particular, that the (regular) invariants in (1.2) are
the Fourier transforms of the data indexed by G. More generally, we have:
Proposition 3.1. The rows of the Fourier transform b
x(β) matrix reduce as β under the regular
action.
CANONICAL DECOMPOSITIONS AND INVARIANTS FOR DATA ANALYSIS
7
Proof. Assume, without loss of generality that β is in dimension of 2, select the first row of b
x(β)
and write βijτ to indicate the ij entry of βτ . We want to show that G acting on the components
u=
X
τ
τ β11
, v=
τ ∈G
X
τ
τ β12
τ ∈G
of the first row of b
x(β) as points in the group algebra of G according to the regular action
(uσ −1 , vσ −1) gives βσ , so that the representation coincides with (one of the two copies of) β,
that is
σ
σ
σ
σ
uσ −1 = uβ11
+ vβ21
, vσ −1 = uβ12
+ vβ22
Indeed,
σ
σ
uβ11
+ vβ21
=
X
X
τ σ
τ σ
τ [β11
β11 + β12
β21 ] =
τ
τσ
τ β11
=
τ
X
γ
(γβ11
)σ −1 = uσ −1 ,
γ
σ + vβ σ = vσ −1 , proving the proposed equality and concluding the proof.
and similarly uβ12
22
We now replace τ by xτ (the scalar data indexed by G) so that the rows of the Fourier transform
b is in dimension of m
b
x(β) should give a basis for an invariant subspace tagged by β. If β ∈ G
then there are m such bases, corresponding to the m copies with which β appear in the regular
representation of G. Repeating the same argument for the remaining rows of xhat(β) we see that,
in matrix form, Proposition 3.1 can be expressed as
b
x(β)βσ =
X
xτ σ−1 βτ .
(3.4)
τ
In particular, the rows (or columns if the action if the regular action is from the right) form a set
of bases for the isomorphic copies of β. In the next two sections these results will be applied to the
study of the regular invariants of S3 and S4 .
4. Data indexed by S3
To illustrate, consider the data shown in Table (4.1), the observed frequencies with which the
DNA words in the permutation orbit
Oact = {act, tac, cta, cat, tca, atc} = {sτ −1 ; τ ∈ S3 },
of the mapping s = act appear in 9 subsequent 900−bp long regions along the BRU isolate of the
Human Immunodeficiency Virus Type I. The entire 9229 bp-long single-strain DNA sequence is
available from the National Center for Biotechnology Information
1http://www.ncbi.nlm.nih.gov/
1
data base using the accession
8
MARLOS VIANA UNIVERSITY OF ILLINOIS AT CHICAGO EYE CENTER
number K02013.
1
2
3
4
act
8 16 16
tac
7 17 13 15
6
7
7 17 11 12
9 11 18
8
9
6 14
5 17
15
cat
14 15 16 14 21 17 15 10
tca
11 18 10 17 11 16 14
7 15
9 14 15
8
cta
atc
8 14
5
5 16
8
(4.1)
9 13
9 13 11 11 11 12 10
total 62 89 78 75 83 81 78 47 78
It is assumed in this section that we write the elements of S3 in the order of {1, (123), (132), (12), (13), (23)},
so that Oact is obtained by evaluating sτ −1 in that order, where s(1) = a, s(2) = c, s(3) = t. In
what follows, moreover, the components of vectors such as
x0 = (act, tac, cta, cat, tca, atc),
indicate in short notation the data and at the same time the corresponding permutations in S3 .
Other common examples occur in ranking preferences studies, or scalar data in psychometric studies
where scalar responses to the different sequences of presentation of a stimuli are recorded.
Having identified the labels and the structured data, we remark again that in the present the
study the labels and the symmetries of potential interest coincide. In particular, we will study
the case in which all permutations in S3 are allowed to act on the labels (which are in one to one
correspondence with S3 ) according its multiplication table
1 2 3 4 5 6
1 1 2 3 4 5 6
2 2 3 1 6 4 5
3 3 1 2 5 6 4 ,
(4.2)
4 4 5 6 1 2 3
5 5 6 4 3 1 2
6 6 4 5 2 3 1
where we identify 1, (123), (132), (12), (13), (23) with 1, 2, 3, 4, 5, 6, respectively. This is called the
regular action, and the resulting permutation representation is the regular representation of S3 and
indicated here by φ. For example, when τ = (12), φτ is the permutation matrix defined by rows 1
and 4 of Table (4.2).
Because this action is transitive, Step (4) of Section 2 leads to a simple single-orbit symmetry
study.
CANONICAL DECOMPOSITIONS AND INVARIANTS FOR DATA ANALYSIS
9
b = {1, Sgn, β} the irreducible representations of S3 ,
The canonical projections. Indicate by G
where 1 is the symmetric or trivial representation, Sgn the alternating (or parity) representation,
both in dimension of 1, and β is in dimension of two. It appears with two isomorphic copies in the
regular representation of S3 . Their irreducible characters are given by
τ
χ1 χSgn
χβ
1
1
1
2
(123)
1
1
−1
(132)
1
1
−1 ,
(12)
1
−1
0
(13)
1
−1
0
(23)
1
−1
0
from which the evaluation of the canonical projections
X
Pχ = nχ
χ(τ )φτ /6,
τ ∈G
0
0
gives P1 = ee /6 where ee is the 6 × 6 matrix of ones,
1
1
1 −1 −1 −1
1
1
1 −1 −1 −1
1
1
1 −1 −1 −1
PSgn = 1/6
, Pβ = 1/3
−1 −1 −1
1
1
1
1
1
1
−1 −1 −1
−1 −1 −1
1
1
1
2 −1 −1
0
0
0
−1
2 −1
0
0
0
−1 −1
2
0
0
0
.
0
0
0
2
−1
−1
0
0 −1
2 −1
0
0
0
0 −1 −1
2
Interpreting the regular invariants. Borrowing language from physics (Bacry, 1967), we find
it useful to think of (the resulting actions of the) permutations {1, (123), (132)} as the rotations and
{(12), (13), (23)} as the reversals. This is also justified when S3 is interpreted as the dihedral group
D3 , in which case its action on the vertices of the regular triangle describes its 3-fold rotations as
seen from “both sides”. Applying the interpretability principles introduced in Section 2, we observe
that
(1) P1 x gives the symmetric invariant act + tac + cta + cat + tca + atc;
(2) PSgn x gives the alternating invariant act + tac + cta − cat − tca − atc, comparing the total
effect of rotations with the total effect of reversals, and
(3) Pβ x evaluates as an invariant of within-rotation variability and within-reversal variability,
giving up an invariant subspace in dimension of four.
The degree of arbitrariness induced by the regular action can be interpreted as the arbitrariness
intrinsic to the notion of rotations and reversals, which in a sense is equivalent to a notion of
10
MARLOS VIANA UNIVERSITY OF ILLINOIS AT CHICAGO EYE CENTER
planar orientation. To see this, observe that although there are 3! = 6 distinct assignments of the
symbols {a, c, t} to the labeled (as 1, 2, 3, say) vertices of a regular triangle, there are only two
distinct assignments to those vertices when their labels are removed (by shuffling): namely to the
two distinct classes
{(a, c), (c, t), (t, a)}, {(c, a), (a, t), (t, c)}
of oriented edges. These two classes are the rotations and the reversals. It is simple to verify
that the action of the permutations act, tac, cta, cat, tca, atc on these edges replicates precisely the
regular action of S3 . With this language, we can then say that (1)-(3) above are the canonical
invariants of rotations and reversals. We remark, however, that more generally, (1)-(3) are the
regular invariants of S3 .
A set of bases for the regular invariants. The projection Pβ suggests the basis {2e1 − e2 −
e3 , 2e2 − e1 − e3 } ≡ {u, v}. Observing that −u − v = 2e3 − e1 − e2 , it is simple to verify that the
action of S3 on the indices of {u, v} gives a representation
"
# "
# "
# "
# "
# "
#
1 0
0
1
−1 −1
0 1
−1 −1
1
0
β'
,
,
,
,
,
,
0 1
−1 −1
1
0
1 0
0
1
−1 −1
where the matrices follow the order of S3 described above. The resulting Fourier transform
X
b
x(β) =
xτ βτ
τ
of the structured data x at β is then
"
#
act − cta − tca + atc tac − cta + cat − tca
b
x(β) =
' β ⊕ β.
−tac + cta + cat − atc act − tac + tca − atc
From Proposition 3.1, we identify the two bases
Iβ = {act − cta − tca + atc, tac − cta + cat − tca},
and
Iβ0 = {−tac + cta + cat − atc, act − tac + tca − atc},
from rows 1 and 2 of b
x(β), respectively. These are the invariants we are searching for (in dimension
of two). The two (isomorphic) subspaces spanned by these two bases reduce as β under the regular
action of S3 , that is, (3.4) obtains.
The alternating invariant. Clearly, a trivial application of Proposition p1 with the alternating
character gives the invariant
ISgn = act + tac + cta − cat − tca − atc
comparing rotations and reversals.
CANONICAL DECOMPOSITIONS AND INVARIANTS FOR DATA ANALYSIS
11
The invariant basis. The vectors
{I1 , ISgn, Iβ , Iβ0 }
define the change of basis matrix
B=
relative to which
1
1
1
1
1 −1
0
1
0 −1
1 −1
1
1
1
1
1 −1 −1 −1
0
0 −1
1
,
−1
1 −1
0
1
1
0 −1
0
0
1 −1
BP1 B−1 = Diag(1, 0, 0, 0, 0, 0), BPSgnB−1 = Diag(0, 1, 0, 0, 0, 0), BPβ B−1 = Diag(0, 0, 1, 1, 1, 1).
Similarly, the regular action of S3 extended to the components of {I1 , ISgn, Iβ , Iβ0 } gives the representation
φ̃τ = Diag(1, Sgnτ , βτ , βτ ),
relative to which the canonical projections are, respectively, BP1 B−1 , BPSgn B−1 and BPβ B−1 .
Interpreting voting preferences. Adopting the language of (complete) voting preferences, in which
the data are often the frequencies with which voters select one of the n! rankings of n candidates
or objects, we observe that
Iβ = {act − cta − tca + atc, tac − cta + cat − tca},
can be characterized (as highlighted by a) as a basis for the space describing “more radical” (comparing positions 1 and 3) vs “less radical” (comparing positions 2 and 3) position substitutions for
the symbol a. The same description applies to Iβ0 , relative to position substitutions of c.
These invariants resolve the arbitrariness present when the labeling
(1, (123), (132), (12), (13), (23)) ≡ (act, tac, cta, cat, tca, atc)
(4.3)
is implicitly made. That is equivalent to resolving the arbitrary choice of which labeled as the identity transformation. Also equivalently, resolving the arbitrary choice of the generator for the orbit
Os = {sτ −1 ; τ ∈ S3 }. From Proposition 3.1, a different choice of generator would be represented in
a space spanned by a basis that is a linear superposition of Iβ .
It is also opportune to remark that these data analytic considerations do not depend on any
parametric assumption on the underlying probability distributions as they refer to the labels for
the data.
12
MARLOS VIANA UNIVERSITY OF ILLINOIS AT CHICAGO EYE CENTER
The generic interpretation for the regular invariants of S3 . Following with the interpretations on
page 9, it is then possible to summarize the the regular invariants ISgn and Iβ (or Iβ0 ) as
(1) The comparison of rotations and reversals, in dimension of 1;
(2) The joint within-rotation, within-reversal variability, in dimension of 2.
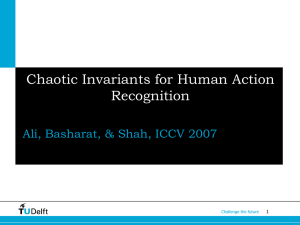
A numerical example. Figure 4.1 displays the two components regular invariant
Iβ = {act − cta − tca + atc, tac − cta + cat − tca} ≡ {v1 , v2 },
for the DNA (log transformed) frequency data from Table (4.1). Indicating by ,→ and ←- the two
opposing (chiral) orientations of planar rotation, we observe that
v1 = |act {z
− cta} + |atc {z
− tca},
←- two-fold
,→ one-fold
v2 = |tac {z
− cta} + |cat {z
− tca}
←- one-fold
,→ two-fold
Figure 4.1. The regular invariant Iβ along the BRU isolate
CANONICAL DECOMPOSITIONS AND INVARIANTS FOR DATA ANALYSIS
13
5. Data indexed by S4
Table 5.1 shows the frequencies xτ , abstracted and adapted from Diaconis (1989), with which
voters chose each one of the 24 different rankings (τ ) of four candidates.
τ
x(τ )
τ
x(τ )
τ
x(τ )
τ
x(τ )
agct
29
tgca
37
cgta
22
gcta
26
agtc
11
actg
25
tacg
43
gtac
44
acgt
19
atgc
46
tgac
24
ctga
57
atcg
50
gcat
24
gatc
35
catg
34
gact
50
gtca
54
ctag
49
tagc
26
cgat
22
cagt
26
tcga
29
tcag
67
.
(5.1)
For example, xagct = 29 voters ranked candidate a first followed by candidates G,C and T ranked
2, 3 and 4 respectively, whereas 37 voters ranked candidate T followed by candidates G,C and A.
The choice of letters is intensional, as the same type of frequency counts appears in molecular
biology studies.
The complete symmetry study of data indexed by S4 is the study of 5 vector (invariant) subspaces,
V = V1 ⊕ VSgn ⊕ 3Vβ ⊕ 3Vγ ⊕ 2Vη
reducing the original data space. Each of the three copies of the subspaces Vβ and Vγ are in
dimension of three, whereas the two copies of Vη are in dimension of two each. There are, in
addition, the alternating (VSgn ) and the trivial (V1 ) subspaces. In what follows we will describe the
bases {Iβ , Iβ0 , Iβ00}, {Iγ , Iγ0 , Iγ00} and {Iη , Iη0 } for 3Vβ , 3Vγ and 2Vη , respectively.
β=
1
0
0
0
1
0
0
0
1
−1
1
1
0
1
0
0
0
1
0
−1
0
−1
0
0
0
0
1
0
0
−1
0
1
0
−1
0
0
1
0
0
1
−1
−1
0
0
1
1
0
0
0
1
0
1
−1
−1
1
0
0
0
0
1
0
1
0
0
−1
0
1
−1
−1
0
0
1
−1
1
1
−1
0
0
0
0
1
1
0
0
1
−1
−1
0
1
0
1
0
0
0
0
1
1
−1
−1
0
0
−1
−1
0
0
0
1
0
0
−1
0
0
0
1
−1
0
0
0
0
−1
0
1
0
1
−1
−1
−1
1
1
0
1
0
−1
0
0
0
0
−1
1
−1
−1
0
1
0
0
−1
0
−1
0
0
1
−1
−1
−1
1
1
0
0
1
−1
0
0
0
0
−1
0
1
−1
−1
1
0
0
0
1
0
−1
1
−1
−1
0
0
−1
0
0
1
−1
0
0
1
−1
−1
0
−1
1
−1
0
0
1
−1
0
−1
1
1
0
0
−1
0
0
1
−1
−1
−1
0
1
0
0
1
(12)
(13)
(14)
(23)
(24)
(34)
(123)
(132)
(234)
(243)
(134)
(143)
(124)
(142)
(1234)
(13)(24)
(1432)
(1324)
(12)(34)
(1423)
(1243)
(14)(23)
(1342)
.
.
(5.2)
(5.3)
Table (5.2) shows an irreducible representation of S4 in dimension of three (Viana, 2008), indexed in
correspondence with the elements of S4 in Table (5.3). When the labels for the data are generated
from agct by the permutations in (5.3), in that order, acting on the positions {1, 2, 3, 4} of the
14
MARLOS VIANA UNIVERSITY OF ILLINOIS AT CHICAGO EYE CENTER
symbols (via sτ −1 ), then the resulting complete set of labels is given by matrix (5.4). Applying
Proposition 3.1 to β with the labels in (1.1), the resulting bases (rows of the Fourier transform of
x at β) are shown in (5.5), (5.6), and (5.7).
agct gact cgat tgca acgt atcg
agtc cagt gcat atgc actg tgac
cgta tacg gtca tagc ctag gcta
(5.4)
tcag gatc ctga catg tcga gtac
agct − gact + acgt + atcg + agtc − gcat + actg + atgc − gtca − gcta − gatc − gtac
Iβ = −cgat + acgt − gcat + cagt + atgc − tgac − ctag + tagc + ctga − tcag − gtac + tcga ,
−tgca + atcg + actg − cgta − gtca + tacg − gcta + ctag − ctga + tcag − tcga + catg
Iβ0
(5.5)
gact − cgat + gcat − cagt − cgta + gtca + gcta − ctag − ctga + gatc + gtac − catg
= agct + gact + tgca − acgt + atcg − cagt − atgc + gtca + tacg − tagc − ctga − tcga ,
−atcg + agtc − actg + atgc + tgac − tacg − ctag + tagc + gatc − tcag + gtac − catg
Iβ00
(5.6)
gact − tgca + gcat − tgac + gtca − tacg + gcta − tagc + gatc − tcag + gtac − tcga
= −acgt + agtc − cagt + actg − atgc + cgta + gcta − tagc − ctga + gatc − tcga + catg .
agct + gact + cgat + acgt − atcg + gcat + cagt − actg − tacg − ctag − tcag − catg
(5.7)
each one spanning one copy of Vβ . Inspection of these bases shows that
(1) Iβ describes “g vs a” at positions 1, 3, 4;
(2) Iβ0 describes “g vs c” at position 1, 3, 4;
(3) Iβ00 describes “g vs t” at positions 1, 3, 4.
The position 2, not present above, is in fact g’s position in the generating sequence “agct”. In each
subspace, the three coordinates correspond to position 1, 3, 4.
Evaluation of the voting data, from Table (5.1), identifies
xga = (−1.99, −0.63, 1.16) ∈ Iβ ,
xgc = (0.77, 1.93, −2.51) ∈ Iβ0 ,
xgt = (0.30, −1.64, −2.79) ∈ Iβ00 ,
the rows 1, 2 and 3 of b
x(β). The inner product unitary for β in these subspaces is given by
3 1
1
(x, y) = 1/2 x0 1 3 −1 y,
1 −1
3
CANONICAL DECOMPOSITIONS AND INVARIANTS FOR DATA ANALYSIS
15
which gives ||xga|| = 2.87, ||xgc|| = 4.5 and ||xgt|| = 3.14, thus suggesting that the comparison “g
vs c” is relatively more evident than “g vs t” or “g vs a”.
The reduction in the second invariant space in dimension of three. The companion (distinct) irreducible representation of S4 is simply γτ = Sgnτ βτ . That is, multiply the matrices βτ in (5.2)
by the parity Sgnτ of the corresponding permutation. Consequently, the bases for the invariant
subspaces of interest are the rows of
Fγ =
X
xτ Sgnτ βτ ,
τ
specifically,
agct + gact − acgt − atcg − agtc − gcat + atgc + actg − gtca + gcta − gatc + gtac
Iγ = cgat − acgt + cagt − gcat + atgc − tgac − tagc − ctag + tcag − ctga + tcga + gtac ,
tgca − atcg + actg − cgta + tacg − gtca + ctag + gcta − tcag + ctga − catg − tcga
Iγ0
(5.8)
−gact + cgat − cagt + gcat − cgta + gtca − ctag − gcta + gatc + ctga + catg − gtac
= agct − gact − tgca + acgt − atcg − cagt − atgc + tacg + gtca + tagc + ctga − tcga ,
atcg − agtc + atgc − actg + tgac − tacg − tagc − ctag + tcag + gatc + catg − gtac
Iγ00
(5.9)
−gact + tgca + gcat − tgac − tacg + gtca + tagc − gcta + tcag + gatc − tcga − gtac
= acgt − agtc − cagt − atgc + actg + cgta + tagc − gcta + gatc + ctga − catg − tcga .
agct − gact − cgat − acgt + atcg + cagt + gcat − actg − tacg − ctag + tcag + catg
(5.10)
To outline the interpretation of these subspaces we need some notation. Indicate by ±Nk the sum
of (the data indexed by) the permutations with the symbol N in the k-th position that differ only
by cyclically moving the remaining symbols in one direction (+) and in the opposite direction. For
example, then, the first axis
I1γ = agct + gact − acgt − atcg − agtc − gcat + atgc + actg − gtca + gcta − gatc + gtac
Iγ can represented as ±a1 ± g1 . It then follows that
I1γ = ±a1 ± g1 , I2γ = ±a3 ± g3 , I3γ = ±a4 ± g4 .
Similarly,
0
0
0
00
00
00
I1γ = ±c1 ± g1 , I2γ = ±c3 ± g3 , I3γ = ±c4 ± g4 ,
and
I1γ = ±t1 ± g1 , I2γ = ±t3 ± g3 , I3γ = ±t4 ± g4 .
16
MARLOS VIANA UNIVERSITY OF ILLINOIS AT CHICAGO EYE CENTER
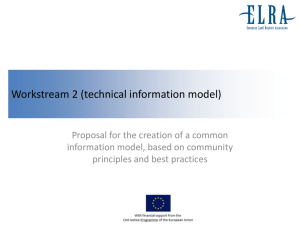
The partition λ = 22.
({1, 2}, {3, 4})
({1, 3}, {2, 4})
({1, 4}, {2, 3})
({2, 3}, {1, 4})
({2, 4}, {1, 3})
({3, 4}, {1, 2})
u
v
1
(12)
(13)
(14)
(23)
(24)
1
1
4
5
2
3
2
4
2
6
1
2
3
5
6
3
3
1
4
2
1
4
4
6
5
3
5
1
6
5
6
6
3
2
5
4
u
−u
u−v
v
v
u−v
v
−u + v
−v
u
u
−v
(34)
(123)
(234)
(134)
(124)
(1234)
1
4
2
4
5
4
3
5
3
6
4
5
2
1
1
2
6
1
5
6
6
5
1
6
4
2
4
1
3
2
6
3
5
3
2
3
−u
−u + v
−v
−u + v
−v
u−v
−u + v
−u
u−v
−u
u−v
−v
(1324)
(1243)
6
5
4
1
2
4
5
3
3
6
1
2
−u
v
−u + v
u
τ
1
0 −1
0
1 −1 0
1
0 1
1 −1
0
1 −1
1
0 −1 1
0
1 0
0 −1
−1
0 −1
1
0 −1 0 −1 −1 1 −1
1
−1
1 −1
0
1 −1 1 −1 −1 0 −1
0
0 −1
0 −1 −1
1 1 −1
1 0
1 −1
1 −1
1 −1 −1
0 0 −1
0 1
0 −1
−1
0
1
0 −1
0 0
1
1 0
0
1
−1
1
0
1 −1
1 1
0
0 1
1
0
0
0
0
2
0
0
0 −1 −1 −1 −1 −1
−1 −1 −1
0
2
0
0
2
0
0
2
0
Interpretation. Keeping in mind that in the generating permutation the symbol g occupies position
number 3, we observe that each subspace compares g against the cyclic (eventually chiral) changes
of the remaining symbols in the remaining positions, one subspace for each one of the three positions
1, 2 or 4 to which g is moved to.
6. Comments and summary
These Chapter is an invitation to developing new applications of symmetry arguments to the
study of experimental data indexed by permutations. It emphasized the methodological aspects
of reducing the data space in subspaces where the resulting data summaries can be studied by
descriptive and inferential statistical methods. We observe that:
CANONICAL DECOMPOSITIONS AND INVARIANTS FOR DATA ANALYSIS
17
(1) It should be well understood that the isomorphic copies of the subspaces determined by b
x
are not invariant subspaces, as clearly demonstrated by Figures 4.1 and ??. The invariant
subspace is the direct sum (indexed by the corresponding irreducible representation) of the
two copies;
(2) Proposition 3.1 was obtained by letting S` act on the left (position symmetry, as in (3.1).
A similar result can be obtained for right actions (3.2), resolving symbol arbitrariness;
(3) Symmetry studies of regular actions (the group acting on itself) are simpler to interpret
compared with other group actions in which the action gives intransitivities. That is, in the
regular case, the step (4) described in Section 3 always gives a single orbit. Otherwise, when
orbits appear, as illustrated by (3.3), the canonical projections collect together pieces from
different orbits and label the resulting classes by the irreducible representations, in one-toone correspondence with the canonical projections. This “popping out into non-isomorphic
subspaces” clearly complicates any eventual interpretations. This is why the representations
might be restricted to the underlying orbits, for data analytic purposes.
This chapter illustrated the evaluation and interpretation of canonical invariants in symmetry
studies of data indexed by permutations of three and four symbols.
18
MARLOS VIANA UNIVERSITY OF ILLINOIS AT CHICAGO EYE CENTER
Appendix A
2
6
6
6
6
6
6
6
6
6
6
6
6
6
6
6
6
6
6
6
6
6
6
6
6
6
6
6
B=6
6
6
6
6
6
6
6
6
6
6
6
6
6
6
6
6
6
6
6
6
6
6
6
6
6
4
1
1
1
0
1
−1
−1
0
1
−1
1
−1
1
−1
0
1
1
−1
0
1
1
−1
1
−1
1
−1
−1
0
1
1
−1
1
1
1
0
−1
1
1
0
−1
1
1
−1
1
1
1
−1
1
1
1
0
−1
1
1
0
−1
1
1
−1
1
1
−1
1
−1
1
1
1
0
1
−1
1
−1
1
−1
−1
0
1
1
1
0
1
−1
−1
0
1
−1
0
1
1
1
1
0
1
−1
0
1
0
1
1
0
0
0
−1
1
−1
0
0
1
0
−1
0
−1
0
−1
1
0
0
0
−1
0
1
0
1
1
0
0
0
−1
1
0
1
0
−1
1
1
0
0
0
−1
0
0
1
0
−1
1
−1
−1
−1
0
1
1
−1
1
1
0
0
−1
0
1
0
1
0
−1
0
0
−1
0
0
1
−1
0
0
−1
−1
1
−1
0
0
1
0
−1
0
−1
0
−1
1
0
−1
0
1
0
0
0
1
0
−1
1
−1
0
−1
−1
0
−1
1
−1
1
0
−1
1
0
0
1
−1
0
0
1
−1
1
0
1
−1
−1
1
0
0
0
1
−1
0
1
0
1
−1
0
1
0
−1
−1
0
1
1
0
0
0
1
1
1
0
1
0
1
1
0
0
0
0
1
0
1
0
−1
0
0
0
−1
0
0
−1
1
−1
1
−1
0
0
−1
−1
0
1
0
1
0
−1
−1
0
0
−1
1
0
0
0
1
0
1
−1
−1
1
0
−1
0
1
0
−1
0
1
−1
1
0
1
−1
0
0
0
0
0
0
1
0
0
1
−1
−1
0
−1
0
1
0
1
0
0
−1
−1
1
−1
−1
0
0
0
−1
0
0
−1
0
0
0
1
1
0
1
0
−1
−1
0
−1
0
0
1
1
1
0
−1
−1
0
0
−1
0
0
0
−1
0
1
−1
0
−1
0
−1
−1
0
0
0
1
1
0
0
1
0
0
0
1
0
0
0
0
−1
−1
0
−1
1
0
1
0
0
0
0
1
0
−1
0
1
−1
0
0
1
0
0
0
−1
0
−1
1
0
0
0
0
0
−1
0
1
0
−1
−1
0
0
−1
0
1
0
0
1
1
0
0
−1
1
0
0
1
0
0
−1
0
−1
0
0
0
1
−1
0
−1
−1
0
0
0
0
1
0
1
−1
−1
0
−1
1
1
0
1
−1
0
0
1
−1
1
−1
1
−1
0
−1
0
0
1
−1
0
0
−1
1
−1
0
0
1
1
0
0
1
0
1
1
−1
1
1
1
0
0
0
−1
1
0
1
0
1
−1
0
−1
0
−1
1
0
−1
0
−1
−1
0
1
0
−1
0
−1
0
0
1
−1
0
1
−1
0
−1
1
0
1
−1
0
1
−1
0
0
1
0
0
−1
0
0
1
0
0
−1
−1
0
0
1
1
0
1
0
−1
1
−1
0
0
0
BB0 =
where
1
Diag(1, 1, β, β, γ, γ)
24
4 −2 2 −1
−2 4 −1 2
β = 96
, γ = 48
2 −1 4 −2
−1 2 −2 4
6
2
2
6 −2 −1 −3
2 −2
2 −3 −1 −1 −3 −1 −1
6 −1
1 −1 −3
1 −3 −1
1
−3 −1 −1
6
2
2
3
1
−1 −3
2
6 −2
1
3
−1
1
2 −2
6
1 −1
−3 −1 −1
3
1
1
6
2
−1 −3
1
3 −1
2
6
−1
1 −3
1
1 −3
1 −1
3
2 −2
1
−3
1
−1 .
3
2
−2
6
3
7
7
7
7
7
7
7
7
7
7
7
7
7
7
7
7
7
7
7
7
7
7
7
7
7
7
7
7
7
7
7
7
7
7
7
7
7
7
7
7
7
7
7
7
7
7
7
7
7
7
7
7
7
5
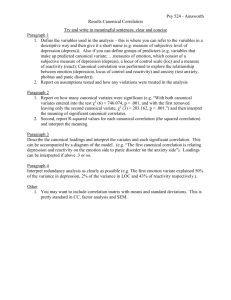
CANONICAL DECOMPOSITIONS AND INVARIANTS FOR DATA ANALYSIS
w1 compares the dihedral images of the words acgt and agtc.
a
‚
‚
+‚
c
‚
‚
‚
a
‚
‚
+‚
t
‚
‚
‚
a
‚
‚
−‚
g
‚
‚
‚
a
‚
‚
−‚
c
‚
‚
‚
t
g
c
g
c
t
g
t
g
‚
‚
+‚
c
‚
‚
‚
g
‚
‚
+‚
t
‚
‚
‚
g
‚
‚
−‚
a
‚
‚
‚
g
‚
‚
−‚
t
‚
‚
‚
t
a
c
a
t
c
a
c
c
‚
‚
+‚
g
‚
‚
‚
c
‚
‚
+‚
a
‚
‚
‚
c
‚
‚
−‚
a
‚
‚
‚
c
‚
‚
−‚
t
‚
‚
‚
a
t
g
t
t
g
a
g
t
‚
‚
+‚
g
‚
‚
‚
t
‚
‚
+‚
a
‚
‚
‚
t
‚
‚
−‚
g
‚
‚
‚
t
‚
‚
−‚
c
‚
‚
‚
a
c
g
c
c
a
g
a
19
20
MARLOS VIANA UNIVERSITY OF ILLINOIS AT CHICAGO EYE CENTER
a
+
t
g
c
t
+
a
c
g
a
−
g
t
c
g
−
c
a
,
(A.1)
t
References
Bacry, H. 1967. Leçons sur la theorie des groupes et les symétries des particules elémentaires, Dunot, Paris, France.
Diaconis, P. 1989. A generalization of spectral analysis with application to ranked data, Annals of Statistics 17, 949–979.
Riley, K. F., M. P. Hobson, and S. J. Bence. 2002. Mathematical methods for physics and engineering, 2nd ed., Cambridge
University Press, New York, NY.
Serre, Jean-Pierre. 1977. Linear representations of finite groups, Springer-Verlag, New York.
Viana, M. 2006. Symmetry studies and decompositions of entropy, Entropy 8, no. 2, 88–109.
. 2008. Symmetry studies- an introduction to the analysis of structured data in applications, Cambridge University
Press, New York, NY.