2.5 Scalar triple product

2.5
Scalar triple product
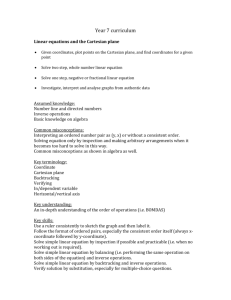
A parallelepiped is the three-dimensional analogue of the parallelogram.
A
B
O
If we let a =
−→ b =
C
−−→ and c =
−→ then its volume is given by
V = | a · ( b × c ) | .
The expression a · ( b × c ) is called the scalar triple product of a , b and c .
49
Example 2.22.
Find the volume of the parallelepiped spanned by
1
2
,
− 3
− 2
,
− 4
3
.
3 7 7
50
Example 2.23.
Show that the points
A (3 , 3 , 5) , B (1 , 0 , 1) , C (2 , 2 , 4) , D (2 , 1 , 2) are coplanar.
2.6
Planes in
R
3
We have already seen that planes in R
3 can be written in two different forms ax
1
+ bx
2
+ cx
3
= d Cartesian form x = a + λ
1 v
1
+ λ
2 v
2
Parametric vector form
We have seen how to go between these two forms.
51
There is another form, very similar to the Cartesian form and that is:
Definition 2.24.
Let n , a ∈ R
3 . The point-normal form of a plane is an expression of the form n · ( x − a ) = 0 .
Here n is called the normal vector to the plane and a is the coordinate vector of any point on the plane.
Useful diagram:
To go from the point-normal form to the Cartesian form, simply “expand out” the point normal form.
52
Example 2.25.
Write
1
2
·
x −
4
5
= 0 in
3 6
Cartesian form.
Going the other way, from Cartesian form to the pointnormal form is easy. Simply note that the normal to ax
1
+ bx
2
+ cx
3
= d is n =
a
b
.
c
53
Explain why the normal is indeed n = a b
. Write x
1
+ 2 x
2
+ 3 x
3
= 4 in point-normal form.
c
Finally, if we have a plane in parametric vector form x = a + λ
1 v
1
+ λ
2 v
2
, λ
1
, λ
2
∈ R .
To convert this to point-normal form we simply need to find the normal vector. Luckily, this is easy: n = v
1
× v
2
.
54
Example 2.27.
Let
1
2 x = 2
+ λ
1
− 1
+ λ
2
−
5
4
, λ
1
, λ
2
∈ R
3 3 1
Write this plane in point-normal form, and then in Cartesian form.
55
2.6.1
Distance between a point and a plane
We can use what we have learnt to solve an interesting geometrical problem. We have already seen how to find the shortest distance between a point and a line. We will now learn how to find the shortest distance between a point and a plane in R
3 .
The shortest distance between a point P and a plane in
R
3 is found by:
1. Finding any point on the plane, say A .
2. Finding the normal to the place n .
3. The shortest distance is given by
| proj n
−→
|
56
Example 2.28.
Find the shortest distance between the plane passing through A (1 , 2 , 3) , B ( − 3 , 2 , 1) and
C (4 , 5 , 6) and the point P (4 , − 2 , 3).
57