time evolution of dynamic systems - LAR-DEIS
advertisement

AC&ST
AUTOMATIC CONTROL AND SYSTEM THEORY
TIME EVOLUTION
OF DYNAMIC SYSTEMS
Claudio Melchiorri
Dipartimento di Ingegneria dell’Energia Elettrica e dell’Informazione (DEI)
Università di Bologna
Email: claudio.melchiorri@unibo.it
C. Melchiorri (DEI)
Automatic Control & System Theory
1
Y1
AC&ST
Summary
!
=
Y2
= Y
1
R1
x
+
u
ẋ!1 ẋ = =−−
R
1
L 1 x1 +L1 u
1
L
y y = =R1Rx11Lx1
PROBLEM: Computation of the time-evolution of the state x(t) of a
dynamic system
Σ
u
input
11
1 1
x
+
uu
ẋ2 ẋ2= =− −
x
+
2
2
CRCR
CR
CR
2 2
22
y =x2x2
y y=
! !
output
x state
ẋ(t)ẋ(t)=
x(t)x(t)=
1) Non-linear systems
2) Linear time-varying systems
=f (x(t),
f (x(t),
u(t),
u(t),
t),t),
= ??
??
ẋ(t) = A(t)x(t) + B(t)u(t),
" t
ẋ(t) = A(t)x(t) + B(t)u(t),
"
x(t) = Φ(t, t0 )x0 +
x(t) = Φ(t, t0 )x0 +
3) Linear time-invariant systems
C. Melchiorri (DEI)
x(t0)) =
=x
x0
x(t
0
0
t
t0
t0
x(t0 ) = x0
x(t0 ) = x0
Φ(t, τ )B(τ )u(τ )dτ
Φ(t, τ )B(τ )u(τ )dτ
ẋ(t) = Ax(t) + Bu(t),
x(0) = x0
Z t+ Bu(t),
ẋ(t) = Ax(t)
x(0) = x0
At
"A(t
t ⌧ ) Bu(⌧ )d⌧
x(t)
=
e
x
+
e
0
ẋ(t)x(t)= =Ax(t)
Bu(t),
x(0) = x0
eAt x+
Bu(τ
)dτ
00+
"
Automatic Control & System Theory
t0
2
AC&ST
Systems in vector spaces
We consider systems in input-state-output form, where x, y, z in
general are elements of vector spaces with proper dimensions
u
input
Σ
y
output
x state
Then, we have:
1.
Single-Input Single-Output (SISO) systems
if
p=q=1
2.
Multi-Input Multi-Output (MIMO) systems
if
p > 1, q > 1
C. Melchiorri (DEI)
Automatic Control & System Theory
3
AC&ST
Systems in vector spaces
Mathematical models
• Linear models
Time invariant
Time variant
With A(t), B(t), C(t), D(t)
Piecewise continuous
• Non linear models
Time invariant
C. Melchiorri (DEI)
Time variant
Automatic Control & System Theory
4
AC&ST
Systems in vector spaces
• A linear time-invariant system is represented:
• in the MIMO case by 4 matrices (A, B, C, D)
• in the SISO case by (A, b, c, d).
x(0)
u
B
x
f
C
y
+
+
D
u : input; y : output; f : forcing action; x : state
A : system matrix
B : input distribution matrix
C : output distribution matrix
D : algebraic input/output connection matrix
C. Melchiorri (DEI)
Automatic Control & System Theory
5
AC&ST
Systems in vector spaces
• Problem: computation of the time evolution of the state x(t) given
• the initial conditions x0
• the input u(.)
u
t1
t2
t3
t
trajectory
t
x(t)
Set of the admissible velocities
x(0)
State space
C. Melchiorri (DEI)
Automatic Control & System Theory
6
AC&ST
Example
Two dof robot
θ2
θ1
θi:
τi:
mi:
ai:
aci:
Ii:
g:
Si, Ci:
joint variable
joint torque
link’s mass
link’s length
centre of mass position
inertia
gravity acceleration
sin(θi), cos(θi)
Given the torques τ1 and τ2,
Compute the time-evolution
of θ1 and θ2
Not simple ! ! ! ! …
Same problem as
C. Melchiorri (DEI)
Automatic Control & System Theory
7
AC&ST
Non linear systems
Theorem. The differential equation
admits a unique solution x(t) if
1.
2.
The function f(x, ‧) is piecewise continuous ∀ x ∈ Rn, ∀ t ≥ t0
The following Lipschitz condition holds∀ t ≥ t0 (not a discontinuity point
for f(x, ‧)) and for any pair of vectors x1, x2
• Proof. Based on the the Peano-Picard successive approximations method
Corollary: The solution
C. Melchiorri (DEI)
x(t) is a continuous function
Automatic Control & System Theory
8
AC&ST
Non linear systems
We still have the problem of the computation of the solution of the
differential equation:
• Numerical methods
• Analytical methods
• Numerical integration of a function specified by samples
f(t0), f(t1), …, f(tn)
f
• Rectangle rule (constant value in each interval)
t
• Trapezoidal rule (linear interpolation in each interval) f
Z
tn
t0
f (T )dt ⇡
C. Melchiorri (DEI)
f (t0 ) + 2
n
X1
i=1
f (ti ) + f (tn )
!
h
2
Automatic Control & System Theory
t
9
AC&ST
Non linear systems
• Simpson rule
(quadratic interpolation in each interval)
(n even => an odd number of samples is required)
Function
1
0.8
h: 0.5
Rectangle rule:
Trapezoidal rule:
Simpson rule:
3.00236726015005
2.85542094707693
2.87929762575957
h: 0.25
Rectangle rule:
Trapezoidal rule:
Simpson rule:
2.94669069425499
2.87321753771844
2.87914973459894
h: 0.1
Rectangle rule:
Trapezoidal rule:
Simpson rule:
2.90758196912244
2.87819270650781
2.87914021733018
h: 0.0001
Rectangle rule:
Trapezoidal rule:
Simpson rule:
2.87916935623558
2.87913996697296
2.87913996792015
0.6
0.4
0.2
0
-0.2
-0.4
-0.6
0
1
2
C. Melchiorri (DEI)
3
4
5
6
Automatic Control & System Theory
10
AC&ST
Non linear systems
• Runge-Kutta methods
By substituting the derivative with the incremental ratio related to the
discrete time step h one obtains
These are the first two elements of the Taylor series expression of function
x(ti+1):
The “Runge-Kutta methods” approximate the Taylor series expression by
substituting the higher order derivative terms with a proper linear
combination of the first order derivative computed in points internal to the
time step
C. Melchiorri (DEI)
Automatic Control & System Theory
11
AC&ST
Non linear systems
The “Runge-Kutta methods” approximate the Taylor series expression by
substituting the higher order derivative terms with a proper linear combination
of the first order derivative computed in points internal to the time step
As an example, the third-order Runge-Kutta method is based on the following
relationship
with
C. Melchiorri (DEI)
Automatic Control & System Theory
12
AC&ST
Linear time-varying systems
Let us consider a linear time-varying system:
Since it is linear, the decomposition property holds for both the motion
and response functions
C. Melchiorri (DEI)
Free motion
Forced motion
Free response
Forced response
Automatic Control & System Theory
13
AC&ST
Linear time-varying systems
•
From
Free motion
Since function
Forced motion
ϕ( .) is linear in x0, it follows that
where Φ(.,.) is the so-called State transition matrix. Obviously, this
matrix must give the solution of the homogeneous differential
equation
C. Melchiorri (DEI)
Automatic Control & System Theory
14
AC&ST
Linear time-varying systems
• Let us consider the homogeneous time-varying linear system
x(t) is a n x 1 vector
A(t) is a n x n matrix whose elements are piecewise continuous functions
• Let us define the State transition matrix Φ(t, t0) as the (unique) solution of
the matrix differential equation
where X(t) is a real n x n matrix and I the identity n x n matrix
• The columns of Φ(t,t0) are the n solutions
obtained by assigning as initial conditions
x(t0) = ei, being ei the i-th column of the
identity matrix
C. Melchiorri (DEI)
Automatic Control & System Theory
15
AC&ST
Linear time-varying systems
Indeed, given:
D.23 Let Φi(t,t0) (i=1, . . . , n) be the n solutions of (1) with initial
conditions xi (t0) = ei , where ei is the i-th column of the identity matrix.
The matrix Φ(t,t0) having the functions Φi (t,t0) as columns is called the
state transition matrix of system (1).
C. Melchiorri (DEI)
Automatic Control & System Theory
16
AC&ST
Linear time-varying systems
The solution of (1) is:
Properties of the state transition matrix
The state transition matrix satisfies the following properties
• Non singular: matrix Φ(t,t0) is non singular for each pair (t, t0) – this is
a consequence of the (existence and) uniqueness of the solution of (1)
• Inversion:
Φ(t,t0) = Φ-1(t0,t)
• Composition:
Φ(t,t0) = Φ(t,t1) Φ(t1,t0)
• Separation:
Φ(t,t0) = Θ(t) Θ-1(t0)
• Time evolution of the determinant:
C. Melchiorri (DEI)
Automatic Control & System Theory
17
AC&ST
Linear time-varying systems
Computation of the state transition matrix
The transition matrix can be computed in two ways:
• Peano-Baker succession
• Runge-Kutta methods: based on the numerical integration of
differential equations of the type
with a specified integration step δt
C. Melchiorri (DEI)
Automatic Control & System Theory
18
AC&ST
Matrix functions
• Given a m x n matrix whose elements are functions of time
• The time-derivative or the time-integral of the matrix A(t) are m x n matrices
with elements the derivative or integral of the elements aij(t)
Example:
C. Melchiorri (DEI)
Automatic Control & System Theory
19
AC&ST
Linear time-varying systems
• Let us consider the non homogeneous, time-varying linear system
• Theorem: The solution of (2), given the input function u(t) piecewise
continuous in
[t0, t1] and initial conditions x0, t0, is
Free motion
C. Melchiorri (DEI)
Forced motion
Automatic Control & System Theory
20
AC&ST
Linear time-varying systems
• Proof (1): By deriving (3), and using the derivation rule of an integral function
d
dt
Z
⇥(t)
f (x, t)dx = f (⇥(t), t)⇥˙
(t)
=
=
=
=
⇥(t)
(t)
⇤
f (x, t)dx
⇤t
(= 0)
one obtains
ẋ(t)
f ( (t), t) ˙ +
Z
Z t
d (t, t0 )
d (t, )
x(t0 ) + (t, t)B(t)u(t) +
B( )u( )d
dt
dt
t0
Z t
A(t) (t, t0 )x(t0 ) + B(t)u(t) +
A(t) (t, )B( )u( )d
A(t)
|
(t, t0 )x(t0 ) +
t
(t, )B( )u( )d
t0
{z
x(t)
A(t)x(t) + B(t)u(t)
C. Melchiorri (DEI)
Z
t0
Automatic Control & System Theory
+B(t)u(t)
}
x(t)
=
ẋ(t)
=
x(t)
=
(t, t0 )x0
A(t)x(t) = A(t) (t, t0 )x0
dx(t)
d (t, t0 )
(t, t0 )x0 =)
=
x0
dt
dt
21
AC&ST
Linear time-varying systems
• Proof (2): Given a generic matrix X(t), by deriving the equality X-1(t) X(t) = I
one obtains:
Then, by derivation of Φ-1(t,t0) x(t):
Since
, and using (2) one obtains:
and, by integration
1
(t, t0 )x(t) = c +
Z
t
1
(t, t0 )B( )u( )d
t0
where c is a constant vector depending on the initial conditions. By exploiting
the composition and inversion properties of Φ the proof is concluded.
C. Melchiorri (DEI)
Automatic Control & System Theory
22
AC&ST
Linear time-varying systems
• The previous equations are used for analysing MIMO time-varying
linear systems
x(0)
u
B(t)
x
f
C(t)
y
+
+
D(t)
• The response function, defining the output of the system, is
C. Melchiorri (DEI)
Automatic Control & System Theory
23
AC&ST
Linear time-varying systems
• The integral in (3) and (4) are convolution integrals with kernels
δ(t): Dirac impulse
at t = 0
These kernel functions are respectively known as
• impulse state response of the system
• impulse response of the system
These functions define the effect at time t on the state or on the output
of an impulse applied at time τ
• The state x(t) is results a continuous function
• If the system is not purely dynamic, i.e. if D(t) ≠ 0, the impulse
affects directly the output, and therefore
C. Melchiorri (DEI)
y(t) is piecewise continuous
Automatic Control & System Theory
24
AC&ST
Dirac Impulse
Dirac impulse
Δ(τ,t0,t)
This piecewise continuous function, if τ
tends to zero, is a signal with infinite
amplitude and unitary area.
It is indicated as δ(t-t0) or δ(t) if t0 = 0
1/τ
t0 t0 + τ
t
We also define
Z
t2
(t
t1
t0 )dt := lim
!0
Z
t2
(⇥, t0 , t)dt = 1
t1
and, for any continuous function of time f(.)
Z
t2
f (t) (t
t1
C. Melchiorri (DEI)
t0 )dt := lim
!0
Z
t2
f (t) (⇥, t0 , t)dt = f (t0 )
t1
Automatic Control & System Theory
25
AC&ST
Dirac Impulse
Let us consider now a purely dynamic system, i.e. D(t)=0, with zero initial
state.
If a Dirac impulse is applied to the i-th input, and all the other inputs are
null, then
yi (t) =
Z
t
W (t, ⇥ ) ei (t
t0 )d⇥ = W (t, t0 ) ei
i = 1, . . . , p
t0
where ei is the i-th columns of the identity matrix Ip.
Hence each single column of W(t, t0) represents the system response to
a Dirac impulse applied at t0 to each single input.
C. Melchiorri (DEI)
Automatic Control & System Theory
26
AC&ST
Dirac Impulse
If a Dirac impulse is applied at the input, then for the following system
one obtains x(t) = Φ(t, τ)
In fact, since x(t) = Φ(t, t0) x(t0), it is possible to see that an impulsive
input is equivalent (from the point of view of the state time-evolution) to
an initial state (for continuous time systems).
C. Melchiorri (DEI)
Automatic Control & System Theory
27
AC&ST
Dirac Impulse
• Therefore:
• In case of discrete-time systems, the Dirac impulse δ(k-h) is a signal
equal to 1 for
k = h, and to 0 otherwise.
(k
h) =
(
1
if k = h
0
otherwise
• In case of discrete-time systems, an impulsive input is not equivalent
to an initial state (it has an effect delayed by 1).
C. Melchiorri (DEI)
Automatic Control & System Theory
28
AC&ST
Linear time-invariant (LTI) systems
Let us consider time-invariant system, expressed in the
continuous time domain as
(
x(t)
=
Ax(t) + Bu(t)
y(t)
=
Cx(t) + Du(t)
and in the discrete time one as
(
C. Melchiorri (DEI)
x(k + 1)
=
Ad x(k) + Bd u(k)
y(k)
=
Cd x(k) + Dd u(k)
Automatic Control & System Theory
29
AC&ST
Linear time-invariant homogeneous systems
• The transition matrix in this case is the exponential of a matrix, i.e.
It may be computed through a power series expansion (from the
Peano-Baker succession with a constant matrix A)
and converges in norm for any t. As a matter of fact, given
(and then || Ai || ≤ mi), one obtains
C. Melchiorri (DEI)
Automatic Control & System Theory
m = || A ||
30
AC&ST
Linear time-invariant homogeneous systems
• Notice that given a m x n matrix, then
N.B.: this is true iff matrix A is diagonal
while
C. Melchiorri (DEI)
Automatic Control & System Theory
31
AC&ST
Why a matrix exponential for the solution?
Let us consider a pair of differential equations
In case of scalar equations, such as
, the solution is given by a
function u(t) = u0 ea t. It is well known that its behavior when t goes to infinity
depends on the sign and value of
a (or of its real part).
We would like to have exponential solutions also for the matrix case, i.e.
If this is the case, by substitution in the differential equation one obtains
C. Melchiorri (DEI)
Automatic Control & System Theory
32
AC&ST
Eigenvalues and eigenvectors
We have seen that starting from differential equations we have defined, for
their solution, a matrix algebraic equation
In order to solve this problem, it is therefore necessary that:
1. Vector x belongs to the null space of (λ I - A)
2. Parameter λ must be chosen so that (λ I - A) DOES PRESENT a null space!
Therefore, parameter λ must satisfy
det(λ I - A) = 0
(λ I - A) x = 0
C. Melchiorri (DEI)
Automatic Control & System Theory
eigenvalue
eigenvector
33
AC&ST
Eigenvalues and eigenvectors
Therefore, the solution to the original problem is given by functions such as
where c1 and c2 are proper constants to be determined on the basis of the
initial conditions.
In this case we have
c1
c2
=
3
1
It is possible to verify that
C. Melchiorri (DEI)
Automatic Control & System Theory
34
AC&ST
Eigenvalues and eigenvectors
Given a n x n (real or complex) matrix A, let us consider the equation:
(1)
This equation admits nontrivial solutions x ≠ 0 if and only if (λ I - A) is singular, that is:
(2)
• The left-hand side member is a polynomial q(λ) with order n called characteristic
polynomial of A. If A is real, its coefficients are real as well
• Eq. (2) is called characteristic equation of A and admits n roots λ1, …, λn , in general
complex, called eigenvalues or characteristic values of A
• If A is real, the complex eigenvalues are conjugate in pairs.
• The set σ(A) = ⎨λ1, …, λn⎬ of all the eigenvalues of A is called the spectrum of A
• Cayley-Hamilton Theorem: every matrix verifies its characteristic equation, i.e.
q(A) = 0
C. Melchiorri (DEI)
Automatic Control & System Theory
35
AC&ST
Eigenvalues and eigenvectors
• Example: Given the matrix
C. Melchiorri (DEI)
Automatic Control & System Theory
36
AC&ST
Eigenvalues and eigenvectors
• For every eigenvalue λi, at least a corresponding vector xi (complex or
real) exists such that eq. (1) is satisfied. This vector is called
eigenvector or characteristic vector of A.
• If xi is an eigenvector, also α xi is an eigenvector. Therefore, it is
possible to use normalized eigenvectors (with unitary norm, i.e.
choosing α = 1/||xi||) .
• If A is real, eigenvectors corresponding to conjugate complex
eigenvalues are conjugate complex as well.
• If the eigenvalues of matrix A are distinct, the corresponding
eigenvectors are linearly independent.
C. Melchiorri (DEI)
Automatic Control & System Theory
37
AC&ST
Eigenvalues and eigenvectors
• Example
Impossibile visualizzare l'immagine. La memoria del computer potrebbe essere insufficiente per aprire l'immagine oppure l'immagine potrebbe essere danneggiata. Riavviare il
computer e aprire di nuovo il file. Se viene visualizzata di nuovo la x rossa, potrebbe essere necessario eliminare l'immagine e inserirla di nuovo.
3
Impossibile visualizzare l'immagine. La memoria del computer potrebbe essere insufficiente per aprire l'immagine oppure l'immagine potrebbe essere
danneggiata. Riavviare il computer e aprire di nuovo il file. Se viene visualizzata di nuovo la x rossa, potrebbe essere necessario eliminare l'immagine e
inserirla di nuovo.
2
1
Impossibile visualizzare l'immagine. La memoria del computer potrebbe essere insufficiente per aprire
l'immagine oppure l'immagine potrebbe essere danneggiata. Riavviare il computer e aprire di nuovo il file. Se
viene visualizzata di nuovo la x rossa, potrebbe essere necessario eliminare l'immagine e inserirla di nuovo.
0
-1
Impossibile visualizzare l'immagine. La memoria del computer potrebbe essere insufficiente per aprire l'immagine oppure
l'immagine potrebbe essere danneggiata. Riavviare il computer e aprire di nuovo il file. Se viene visualizzata di nuovo la x
rossa, potrebbe essere necessario eliminare l'immagine e inserirla di nuovo.
-2
-3
-3
C. Melchiorri (DEI)
-2
Automatic Control & System Theory
-1
0
1
2
3
38
AC&ST
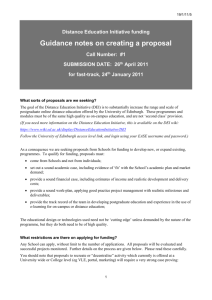
Eigenvalues and eigenvectors
• Example
[V, D] = eig(A)
C. Melchiorri (DEI)
Automatic Control & System Theory
39
AC&ST
Eigenvalues and eigenvectors
• sempio
[V, D] = eig(A)
Being v = [0, 1]T an eigenvector, this “direction”
is not modified by the multiplication by A
3
2
1
0
-1
-2
-3
C. Melchiorri (DEI)
Automatic Control & System Theory
-3
-2
-1
0
1
2
3
40
AC&ST
Similar matrices
• Two matrices A and B are similar if there exists a non-singular matrix T such that
• Similar matrices have the same eigenvalues. In fact, from B = T-1 A T with T non
singular, it follows that
Therefore det(λ I - A) = 0 iff det(λ I – B) = 0
• The similarity property allows to solve in a simple manner a LTI homogeneous system
As a matter of fact, by defining x = T z, z = T-1 x, we have:
C. Melchiorri (DEI)
Automatic Control & System Theory
41
AC&ST
Similar matrices
• An important case is the transformation matrix T that transforms a generic square
matrix A in Jordan form, very convenient for the analysis of dynamic systems.
• In fact, given a generic matrix A, if it is possible to determine a `similar’ matrix B
such that the corresponding matrix exponential eB t is simple to be computed, then
one obtains
• If A is symmetric, the problem of finding B is quite easy since A has n linearly
independent eigenvectors, and from the equation
Eigenvectors
by defining T = [t1, …, tn] one obtains A T = T Λ , being Λ a diagonal matrix with
the eigenvalues on the diagonal. Therefore
The elements of the exponential of a
real symmetric matrix are a linear
combination of the exponential of its
eigenvalues (that are real numbers).
C. Melchiorri (DEI)
Automatic Control & System Theory
42
AC&ST
Similar matrices - Example
Given the matrix:
Then:
and
In this way it is simple to compute the solution z(t) from z0, and then the solution x(t) of
the original problem (being z = T-1 x , then z0 = T-1 x0)
C. Melchiorri (DEI)
Automatic Control & System Theory
43
AC&ST
Similar matrices
In practice, given the system:
ẋ(t) = Ax(t)
If it is possible to determine a diagonal matrix B similar to A:
It results also:
A = T B T-1
Then:
ẋ(t)
1
T
=
Ax(t)
=
T BT
ẋ(t)
=
BT
ż(t)
=
B z(t)
z(t)
=
eBt z0
x(t)
=
eBt T
1
x0
x(t)
=
T eBt T
1
and
T
C. Melchiorri (DEI)
B = T-1 A T
1
1
1
x(t)
x(t)
Automatic Control & System Theory
x0
44
AC&ST
Complex Jordan form
General case. A generic n x n real matrix A has, in general, m complex
eigenvalues: λ1, …, λm, m ≤ n. The complex Jordan form is:
Block diagonal
matrix
Where Ji,j, the Jordan block corresponding to the eigenvalue λi, is defined as
•
•
•
C. Melchiorri (DEI)
Counting multiplicity, the eigenvalues of J, therefore
A, are the diagonal entries.
Given an eigenvalue λi, its geometric multiplicity is the
dimension of Ker(A − λi I), and it is the number of
Jordan blocks corresponding to λi.
The sum of the sizes of all Jordan blocks
corresponding to an eigenvalue λi is its algebraic
multiplicity.
Automatic Control & System Theory
45
AC&ST
Real Jordan form
• The complex Jordan form can be expressed by real numbers, considering that complex
elements in the blocks and in T are associated with conjugate complex elements.
• Let us define:
• λ1, λ2, … λh
the real eigenvalues of A
• µ1, µ2, …, µh
their multiplicity
• σ1 ± j ω1 , σ2 ± j ω2 , …, σk ± j ωk
the complex eigenvalues of A
• ν1, ν2, … νk
their multiplicity
it results n = µ1+µ2 + … + µh + 2 (ν1 + ν2 + … + νk)
• Real Jordan form:
R1, … Rn are (real) blocks
corresponding to real eigenvalues.
C1, …Ck are real blocks, each one
corresponding to a pair of complex
conjugate blocks of the complex
Jordan form.
C. Melchiorri (DEI)
Automatic Control & System Theory
46
AC&ST
Real Jordan form
• Blocks corresponding to real eigenvalues λi:
N.B.:
C. Melchiorri (DEI)
Automatic Control & System Theory
47
AC&ST
Real Jordan form
• Blocks corresponding to conjugate complex eigenvalues σi ± j ωi :
C. Melchiorri (DEI)
Automatic Control & System Theory
48
AC&ST
Real Jordan form
Or, equivalently
C. Melchiorri (DEI)
Automatic Control & System Theory
49
AC&ST
Real Jordan form
In conclusion, in the expression of
C. Melchiorri (DEI)
eA t one can find terms such as:
Automatic Control & System Theory
50
AC&ST
Solution of the differential equation
trajectory
t
x(t)
Set of the admissible
velocities
x(0)
State space
Summarizing, for the computation of the time-evolution of the state x(t):
• Non-linear systems:
in general: numerical methods
• Linear time-varying systems:
Φ(t, t0) (Peano-Baker succession)
• Linear time-invariant systems:
eA t
C. Melchiorri (DEI)
Automatic Control & System Theory
(Jordan form)
51
AC&ST
Example 1
Problem. Determine the solution x(t) of the dynamic system described by
• Computation of the eigenvalues
The eigenvalues λ1 and λ2 of matrix A are computed by equating to zero the
determinant of matrix (λ I – A):
In this case:
and then
This results could also have been obtained by noticing that matrix A is lower triangular,
and therefore its eigenvalues are the elements of the diagonal.
C. Melchiorri (DEI)
Automatic Control & System Theory
52
AC&ST
Example 1
• Computation of the eigenvectors
Let t be the generic eigenvector associated to the eigenvalue λ. The following equation
must hold
Then:
• if λ = -1
• if λ = -2
C. Melchiorri (DEI)
Automatic Control & System Theory
53
AC&ST
Example 1
• Therefore
Check:
NB: it is not necessary to
compute matrix B in this
manner…
(the eigenvalues are
already known!)
• From x = T z one obtains z = T-1 x and therefore the initial state is
C. Melchiorri (DEI)
Automatic Control & System Theory
54
AC&ST
Example 1
• The solution of the new system (in z) is given by
Then:
• Simulation in Matlab/Simulink
Step
x
x' = Ax+Bu
y = Cx+Du
y
State-Space
To Workspace
T
t
Clock
To Workspace1
x' = Ax+Bu
y = Cx+Du
State-Space1
z
K*u
Matrix
Gain
y1
To Workspace2
z
C. Melchiorri (DEI)
Automatic Control & System Theory
To Workspace3
55
AC&ST
Example 1
Plot of z
Plot of x
2
1.2
1
1.5
0.8
1
0.6
0.5
0.4
0
0.2
-0.5
0
-0.2
0
2
4
Time
6
8
10
(sec)
-1
0
2
4 Time (sec) 6
1.2
Time evolution of [x1; x2]
8
10
Plot of T z
1
0.8
Time evolution of [z1; z2]
0.6
0.4
0.2
Time evolution of T*[z1; z2]
0
-0.2
0
2
4
Time
C. Melchiorri (DEI)
Automatic Control & System Theory
6
(sec)
8
10
56
AC&ST
Example 2
Problem. Determine the solution x(t) of the dynamic system described by
• Computation of the eigenvalues
The eigenvalues λ1, λ2 and λ3 of matrix A are computed by equating to zero the
determinant of matrix (λ I – A):
In this case:
and then
C. Melchiorri (DEI)
Automatic Control & System Theory
57
AC&ST
Example 2
• Computation of the eigenvectors
Let t be the generic eigenvector associated to the eigenvalue λ., then (λΙ -Α) t = 0 and therefore:
• If λ = -1
• If λ = -2
• If λ = -3
C. Melchiorri (DEI)
Automatic Control & System Theory
58
AC&ST
Example 2
Therefore
Check:
From z = T-1 x the initial state results
C. Melchiorri (DEI)
Automatic Control & System Theory
59
AC&ST
Example 2
• Therefore, the solution of the new system (in z) is given by
Then:
• Simulation in Matlab/Simulink
Step
t
Clock
To Workspace1
x' = Ax+Bu
y = Cx+Du
y
State-Space
To Workspace
x' = Ax+Bu
y = Cx+Du
State-Space1
K*u
Matrix
Gain
y1
To Workspace2
z
To Workspace3
C. Melchiorri (DEI)
Automatic Control & System Theory
60
AC&ST
Example 2
Plot of x
1.4
1.5
1.2
1
1
0.5
0.8
0
0.6
-0.5
0.4
-1
0.2
-1.5
0
-2
-0.2
-2.5
-0.4
Plot of z
2
0
2
4
Time
6
(sec)
8
10
-3
0
2
4
6
Time (sec)
Plot of T z
2
4
Time
1.4
8
10
1.2
Time evolution of [x1; x2 ; x3]
1
Time evolution of [z1; z2 ; z3]
0.8
0.6
0.4
0.2
0
Time evolution of T*[z1; z2 ; z3] -0.2
-0.4
0
C. Melchiorri (DEI)
Automatic Control & System Theory
6
(sec)
8
10
61
AC&ST
Discrete time systems
• Let consider the time varying linear discrete time homogeneous system
• As in the continuous time case, let define the state transition matrix
Φ(k,h) as the matrix whose columns are the n solutions
corresponding to the initial conditions x(h) = ei, being ei the i-th
column of the identity matrix. The transition matrix satisfies
• For a discrete time system, the transition matrix can be singular (in the
continuous time case, it is always non singular).
C. Melchiorri (DEI)
Automatic Control & System Theory
62
AC&ST
Discrete time systems
For time-invariant systems, eq. (1) becomes
and the transition matrix is simply
In fact
C. Melchiorri (DEI)
Automatic Control & System Theory
63
AC&ST
Discrete time systems
If time-invariant non homogeneous linear systems are considered
One obtains
The proof is straightforward (by direct substitution).
Then, the output of the system results
C. Melchiorri (DEI)
Automatic Control & System Theory
64
AC&ST
Discrete time systems
The impulse state response of the system and the impulse
response of the system are
C. Melchiorri (DEI)
Automatic Control & System Theory
65
AC&ST
Evolution of dynamic systems
In conclusion, considering the Jordan (diagonal) form of the state matrix:
Distinct eigenvalues
Continous-time case
Discrete-time case
The system evolution is given by linearly independent terms since the eigenvalues λ1, …, λn are
distinct.
eλ1 t, …, eλn t
λ1k, …, λnk
C. Melchiorri (DEI)
Automatic Control & System Theory
66
AC&ST
Evolution of dynamic systems
Multiple eigenvalues – Continuous time systems
e
At
2
6
6
=6
4
e
J1 t
0
0
eJ2 t
0
0
..
.
...
...
0
0
0
eJn t
Each block has an upper-triangular form
3
7
7
7
5
λi eigenvalue
µi multiplicity
The evolution depends on functions:
C. Melchiorri (DEI)
Automatic Control & System Theory
67
AC&ST
Evolution of dynamic systems
Multiple eigenvalues – Discrete time systems
2
J1k
6 0
6
Akd = 6
4
0
J2k
0
0
..
.
...
...
0
3
0
0 7
7
7
5
Jnk
λi eigenvalue
µi multiplicity
The evolution depends on functions:
C. Melchiorri (DEI)
Automatic Control & System Theory
68
AC&ST
Stability
• Definition: The homogeneous system
is asymptotically stable if
• Theorem: System (1) is asymptotically stable if and only if every
eigenvalues of
A has negative real part
• Proof. Based on the consideration that λ = ρ, or λ = σ + j ω and then
NB: also the factors tn eλ t tend to 0 if t -> ∞ if the real part of λ is negative
C. Melchiorri (DEI)
Automatic Control & System Theory
69
AC&ST
Stability
• Definition: The homogeneous system
is asymptotically stable if
• Theorem: System (2) is asymptotically stable if and only if every
eigenvalues of
A has modulus smaller than 1
• Proof. Based on the consideration that λ = ρ, or λ = ρ ej ϕ and then
C. Melchiorri (DEI)
Automatic Control & System Theory
70
AC&ST
Appendix
Vector spaces & Matrices
• Main definitions
• Some geometric properties
C. Melchiorri (DEI)
Automatic Control & System Theory
71
AC&ST
Some geometric properties
•
•
•
•
e3
v1
{e1, e2, e3}: principal basis (columns of identity matrix I)
V: subspace (set of vectors with given properties)
v1, v2: basis of the subspace V
V = [v1. v2]: base matrix of the subspace V
Given the n x n matrix A, the subspace V is said invariant in A if
v2
e2
The sum and the intersection of two invariants is an invariant.
V
e1
e3
Change of basis
•
Let’s consider, instead of {e1, e2, e3}, a new basis {h1, h2,
h3} with matrix T = [h1, h2, h3] non singular.
p
h2
h3
AV⊆V
•
x = T z,
e2
e1
h1
C. Melchiorri (DEI)
If vector x contains the coordinates of point p in the
main basis, and z its coordinates in the new one, then
•
z = T-1 x
In the new basis, the n x n matrix A corresponds to
A1 = T-1 A T
Automatic Control & System Theory
72
AC&ST
Some geometric properties
• Given a m x n matrix A, the following subspaces can be defined
im {A} = {y : y = A x, x ∈ Rn} column space of A
ker{A} = {x : 0 = A x}
C. Melchiorri (DEI)
kernel (null) space of A
Automatic Control & System Theory
73
AC&ST
Pseudoinverse of a matrix
• Let consider a linear system defined by
Ax=b
Necessary and Sufficient Condition for the existence of at least
a solution is that
b ∈ im A
(1)
• If (1) is verified, given x0 a particular solution, the set of possible
solutions is
x = x0 + ker A
or, in parametric form
x = x0 + K α
where
• K is a basis matrix of
ker{A} and
• α an arbitrary vector ∈ Rq , with q = dim(ker{A})
C. Melchiorri (DEI)
Automatic Control & System Theory
74
AC&ST
Pseudoinverse of a matrix
• If (1) is not verified, it is possible to compute the value of x so
that the error (in norm) is minimized
|| A x1 – b||2
minimum
If A is a square and non singular matrix, then im{A} = Rn,
ker{A} = {0} and the solution, if exists, is unique and given by
x = A-1 b
A
Rn
Rn
A-1
C. Melchiorri (DEI)
Automatic Control & System Theory
im A
75
AC&ST
Pseudoinverse of a matrix
•
If A is not square or it is singular, then its inverse does not exist and it is necessary
to use the pseudoinverse A+
•
Given the
m x n matrix A, there are two possibilities: 1) m < n;
2) m > n
rank A = min(m,n) = m ➝ im(A) = Rm
∀ b ∈ im(A) ∃ x s.t. b = A x
(more than one!)
x = A+ b ∃ ker(A) s.t. ∀ x ∈ ker(A) ➝ y = A x = 0
➝ x = A+ b + xn ➝ b = A(A+ b + xn) = b, ∀ xn ∈ ker(A)
➝ x = A+ b + (I – A+ A) α
general expression of the solution
x = A+ b has minimun norm
1) m < n
A
Rn
0
ker A
C. Melchiorri (DEI)
A+
Automatic Control & System Theory
Rm
im {A}
76
AC&ST
Pseudoinverse of a matrix
•
If A is not square or it is singular, then its inverse does not exist and it is necessary
to use the pseudoinverse A+
•
Given the
m x n matrix A, there are two possibilities: 1) m < n;
2) m > n
2) m > n
rank A = min(m,n) = n
∀ x ∃ ! b s.t. b = A x
∀ b ∈ im(A) ∃ ! x s.t. b = A x (x = A+ b)
if b ∉ im (A) ➝ ∄ x s.t. b = A x
but if b0 ∉ im (A) ➝ ∃ x0 = A+ b0 ➝ b = A x0 = A A+ b0 ≠ b0
|| b – b0 || is minimum
(A A+ ≠ I)
A
Rn
im{A}
Rm
A+
C. Melchiorri (DEI)
Automatic Control & System Theory
77
AC&ST
Pseudoinverse of a matrix
x0
ker A
b
ker AT
x
x0
Rn
im A
im AT
C. Melchiorri (DEI)
Automatic Control & System Theory
Rm
78
AC&ST
Vector and matrix norms
• Norm: generalization of the concept of distance (length)
• Vector norm: the norm ||.|| of a vector x ∈ Rn is a function Rn ➝ R
such that:
Positive homogeneity
Triangle inequality
• Common norms in Rn :
1-norm
Euclidean norm
2-norm
p-norm
Also called Sup-norm
gives the peak value
C. Melchiorri (DEI)
infinity-norm
Automatic Control & System Theory
79
AC&ST
Vector and matrix norms
• Example: given x = [1, -2, 2]T ➝ ||x||1 = 5, ||x||2 = 3, ||x||1 = 2.
• Lemma: Let ||x||a and ||x||b be two norms of x ∈ Rn. There exists
an infinite number of positive scalar k1, k2 such that
The norms ||.||a and ||.||b are said to be equivalent. This property
holds between any pair of norms in Rn.
• Example:
• Given x = [1, -2, 2]T, then:
C. Melchiorri (DEI)
Automatic Control & System Theory
80
AC&ST
Vector and matrix norms
• A vector x can be multiplied by matrix A: y = A x. In order to relate the
`dimension’ of y and of x, the matrix norm is defined as follows.
• Matrix norm (induced). Let ||x|| be a norm of x ∈ Rn.
The matrix A ∈ Rn x n has the norm induced by ||.|| and defined as:
⇥A⇥
=
⇥ A⇥
=
sup ⇥Ax⇥,
x
kxk=1
| | ⇥A⇥,
• It follows that:
C. Melchiorri (DEI)
Automatic Control & System Theory
81
AC&ST
Vector and matrix norms
• Some matrix norms:
row sum
column sum
Frobenius norm
If
C. Melchiorri (DEI)
Automatic Control & System Theory
82
AC&ST
Eigenvalues, Eigenvectors, Eigenspaces
Let A be a n x n square matrix in R.
Definition
The characteristic polynomial of A is the polynomial of order n
Definition
The characteristic equation of A is the equation
Definition
The n solutions
C. Melchiorri (DEI)
of the characteristic equation are the eigenvalues of A
Automatic Control & System Theory
83
AC&ST
Eigenvalues, Eigenvectors, Eigenspaces
Definitions
Given an n×n matrix A and an eigenvalue λi of this matrix, there are two
indices measuring, roughly speaking, the number of eigenvectors
belonging to λi:
• The algebraic multiplicity of an eigenvalue is defined as the multiplicity of
the corresponding root of the characteristic polynomial.
• The geometric multiplicity of an eigenvalue is defined as the dimension of
the associated eigenspace, i.e. number of linearly independent
eigenvectors with that eigenvalue.
• Both algebraic and geometric multiplicity are integers between (including)
1 and n.
• The algebraic multiplicity ni and geometric multiplicity mi may or may not
be equal, but we always have mi ≤ ni. The simplest case is of course
when mi = ni = 1.
• The total number of linearly independent eigenvectors, Nx, is given by
summing the geometric multiplicities
N
X
mi = N x
i=1
C. Melchiorri (DEI)
Automatic Control & System Theory
84