Statistical Shape Analysis Ian Dryden (University of Nottingham) 3e
advertisement
 3e")
http://www.stat.sc.edu/~dryden/course/ild-ch-04.pdf
Statistical Shape Analysis
Ian Dryden (University of Nottingham)
Session I
Dryden and Mardia (1998, chapters 1,2,3,4)
Ian.Dryden@Nottingham.ac.uk
http://www.maths.nott.ac.uk/ ild
3e cycle romand de statistique et probabilités
appliqués
Introduction
Motivation and applications
Size and shape coordinates
Shape space
Shape distances.
Les Diablerets, Switzerland, March 7-10, 2004.
1
In a wide variety of applications we wish to study the
geometrical properties of objects.
2
An object’s shape is invariant under the similarity transformations of translation, scaling and rotation.
We wish to measure, describe and compare the size
and shapes of objects
Shape: location, rotation and scale information (similarity transformations) can be removed. [Kendall, 1984]
Size-and-shape: location, rotation (rigid body transformations) can be removed.
3
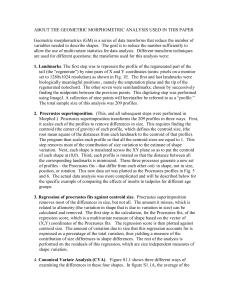
Two mouse second thoracic vertebra (T2 bone) outlines with the same shape.
4
Landmark: point of correspondence on each object
that matches between and within populations.
Different types: anatomical (biological), mathematical,
pseudo, quasi
From Galileo (1638) illustrating the differences in shapes
of the bones of small and large animals.
5
6
Bookstein (1991)
Type I landmarks (joins of tissues/bones)
Type II landmarks (local properties such as maximal
curvatures)
Type III landmarks (extremal points or constructed landmarks)
T2 mouse vertebra with six mathematical landmarks
(line junctions) and 54 pseudo-landmarks.
7
Labelled or un-labelled configurations
8
1
3
A
B
2
3
2
1
3
1
C
2
Traditional methods
D
3
1
2
- ratios of distances between landmarks or angles submitted to multivariate analysis
2
3
3
E
- the full geometry usually if often lost
F
1
1
2
- collinear points?
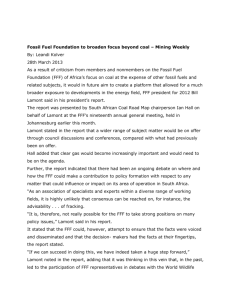
Six labelled triangles: A, B have the same size and
shape; C has the same shape as A, B (but larger size);
D has a different shape but its labels can be permuted
to give the same shape as A, B, C; triangle E can be
reflected to have the same shape as D; triangle F has
a different shape from A,B,C,D,E.
- interpretation of shape differences in multivariate space?
9
10
Geometrical shape analysis
Rather than working with quantities derived from organisms one works with the complete geometrical object itself (up to similarity transformations).
In the spirit of D’Arcy Thompson (1917) who considered the geometric transformations of one species to
another
Pioneers: Fred Bookstein and David Kendall
Summaries of the field are given by Bookstein (1991,
Cambridge), Small (1996, Springer), Dryden and Mardia (1998, Wiley), Kendall et al (1999, Wiley), Lele and
Richstmeier (2001, Chapman and Hall).
We conside a shape space obtained directly from the
landmark coordinates, which retains the geometry of
a point configuration at all stages.
11
12
The map of 52 megalithic sites (+) that form the ‘Old
Stones of Land’s End’ in Cornwall (from Stoyan et al.,
1995).
MR brain scan
14
0.4
13
b
13
12
0.2
11
n
10
Braincase
0.0
9
l
8
7
6
na
-0.2
5
pr
4
1
-0.4
-0.4
3
2
-0.2
0.0
Face
st
0.2
ba
o
0.4
Ape cranium
Handwritten digit 3
15
16
250
200
150
100
•S
•S
•S
•S
50
• S
S
•S
(b)
0
(a)
•
•• S
S
0
50
100
150
200
250
Electrophoretic gel matching
Face recognition
17
Proton density weighted MR image
18
Cortical surface extracted from MR scan
19
20
OUR FOCUS:
landmarks in
real dimensions
is a
matrix (
)
Invariance with respect to Euclidean similarity group
(translation, scale and rotation) =
Size....
Any positive real valued function
for a positive scalar .
203 Pseudo-landmarks on the cortical surface of the
brain
such that
22
21
Centroid size:
"
#
An alternative size measure is the baseline size, i.e.
the length between landmarks 1 and 2:
"
&
'
!
(
&
#
$
%
&
$
)
%
0
%
'
%
where
and
(
&
#
#
$
&
%
*
'
)
,
%
1
)
This was used as early as 1907 by Galton for normalizing faces.
+
,
.
/
-
Other size measures: square root of area, cube root
of volume
,
!
- Euclidean norm,
-
+
identity matrix,
,
vector of ones.
,
23
24
Landmarks:
Shape coordinates:
%
3
3
2
3
2
1
1
1
4
5
2
)
Bookstein shape coordinates (1984,1986) (For two
dimensional data)
Fixed coordinate system
100 200
•
• •
6
0
100 200
Im(z)
0.5
0
100 200
-0.5
0.0
0.5
Re(z)
'
>
@
3
3
3
&
7
8
9
=
:
;
;
9
9
<
1
?
A
1
1
1
<
26
3
•
•
-20 -10 0
-20 -10 0
2
•
-0.5
Shape:
10 20
10 20
•
•
Re(z)
9
•
•
•
-200 -100
25
100 200
• •
0.0
•
•
3
2 3
0
Re(z)
1.0
100 200
0
Im(z)
2
1
•
-200 -100
•
• •
•
-200 -100
1
•
•
Re(z)
2
3
•
•
• •
0
0
-200 -100
3
1
Im(z)
•
-200 -100
Are angles appropriate.....??
1
6
•
•
-200 -100
Im(z)
Local Coordinate system
100 200
vs
1
2
-20 -10 0 10 20
(b)
10 20
1.0
-20 -10 0 10 20
(a)
•
0.5
•
2
3•
1
•
•
2
-0.5
1
0.0
-20 -10 0
3
•
•
-20 -10 0 10 20
(c)
-0.5
0.0
(d)
0.5
In real co-ordinates:
%
$
B
C
D
D
D
G
E
F
F
;
9
G
;
9
H
I
9
;
9
H
F
J
J
I
G
F
;
H
J
J
I
;
H
I
K
L
M
H
G
N
)
$
O
C
D
D
D
G
E
F
F
9
G
;
9
H
J
J
I
;
F
H
I
;
J
J
G
;
F
H
I
9
;
9
H
I
K
L
M
H
where
&
$
P
,
G
F
Q
Q
Q
B
C
D
U
G
;
9
H
I
F
J
R
S
J
G
;
H
I
G
.
O
C
D
T
G
9
N
H
;
N
and
G
M
N
G
$
U
The outline of a microfossil with three landmarks (from
Bookstein, 1986).
T
N
27
28
0.8
slog
•
65
• 84
•
75
•
•
•
• •
• •
•
•
•
•
0.36
0.32
0.5
•
•
•
•
•
•
•
0.6
U
•
•
• ••
•
•
•
•
•
0.75
•
Y
0.4
•
•
•
0.4
0.3
• •
•
••
• •
0.2
• •
• •
••
U
•
•
• ••
•
•
•
•
•
0.65
0.5
•
60
•
•
•
•
•
65
•
•
••
•
•
64
9.2
•
•
•
•
•
•
•
• •
•
•
•
V
•
•
•
0.55
0.44
•
X
•••
•
•
•
72
•
•
•
•
•
8.2
•
0.45
•
67
•
•
•
•
•
71
•
•
• •
• • •
•
• •
•
0.40
V
•
•
•
• •
•
76
•
71
• 84
•
74
0.6
0.44
• •
• •
8.8
•
8.6
•
100
V
0.40
•
•
•
•
8.4
9.0
0.36
•
•
8.2
0.7
•
88
•
92
0.32
•
87
•
88
•
84
8.4
W
•
100
•
88
8.6
8.8
9.0
9.2
W
0.45
0.55
0.65
W
0.75
A scatter plot of (U+1/2) for the Bookstein shape variables for some microfossil data. (Bookstein, 1986)
29
2
30
4
1
0.5
a
d
E
5
_
3
v
0.0
VB
0
`
\
]
1
g
f
b
A
O
B
2
e
-1
F
6
-2
-0.5
^
-2
[
-1
[
0.0
u
[
0.5
0
UB
b
c
-0.5
\
1
]
2
Z
A scatter plot of the Bookstein shape variables for the
T2 mouse data.
31
The shape space of triangles, using Bookstein’s coordinates
. All triangles could be relabelled
and reflected to lie in the shaded region.
h
3
8
i
8
32
Kendall’s shape sphere (1983) (triangles only)
3
Isosceles triangles
1
Equilateral (North pole)
2
θ=0
Unlabelled
Right-angled
Kendall’s shape coordinates
φ=5π/3
Remove location
%
3
3
φ=2π/3
θ=π/2
φ=0
φ=π/3
Flat triangles
(Equator)
%
j
k
l
j
m
j
1
1
1
j
-
;
θ=π
1
&
2
%
3
j
@
3
&
7
o
p
q
3
&
n
n
A
1
1
1
1
;
Reflected equilateral (South pole)
%
j
A mapping from Kendall’s shape variables to the sphere
is
Simple 1-1 linear correspondence with Booklstein S.V.
(equ. 2.11 of book)
For triangles Kendall’s SV sends baseline to
'
s
q
'
3
P
P
7
n
A
!
!
r
,
n
)
A
,
,
3
u
3
r
2
j
t
s
s
o
s
o
o
)
)
,
and
,
s
o
q
P
P
7
n
)
n
)
)
)
,
, so that
%
u
o
o
v
2
j
)
)
)
33
Kendall’s spherical shape shape variables
then given by the usual polar coordinates
w
x
3
u
,
t
x
Kendall’s Bell
are
w
3
34
w
,
2
.
w
x
3
,
j
3
t
where
is the angle of latitude and
is the angle of longitude.
t
w
>
y
y
z
>
y
x
{
t
z
35
36
Bookstein coordinates - 3D
Landmarks
The Schmidt net for 1/12 sphere
#
%
3
#
3
#
2
P
2
#
2
-
)
w
}
&
|
%
3
&
3
&
P
&
|
t
t
t
7
3
x
>
y
y
3
>
y
{
7
7
7
z
-
t
!
1
~
)
%
o
,
@
'
&
3
3
3
)
-1.0
-0.5
0.0
C
•
t
'
A
B
C
C
•
•
A
BA
B
C
C
C •
C
A • B•
A
B
A AB • B
C
C
•
C
C
A
B
C C A •B
A • AB • AB •AB • B
C
C
A • B C
CA • B
•
•
C
C
A
B •
B
A
BA • BA
C
• B
A C
A •B
C
C
A • B
C A •B
C
A • BA • B
• B
A C
A •C
B
• B
A C
A •CB
A •CB A •CB
• B
A C
A •C
B
-1.5
A •CB
A •CB
0.0
1
)
where is a
(a function of
rotation matrix
) and
A
A
%
3
3
P
)
%
t
'
3
A • CB
,
>
3
>
t
3
r
3
>
3
>
3
-
,
r
-
)
-0.5
1
• B
A C
A
%
0.5
P
P
%
7
3
P
3
P
7
>
7
-
)
where
P
>
7
,
P
and
>
P
7
&
&
7
for
@
)
.
3
3
1
1
1
38
37
Goodall-Mardia QR shape coordinates
Helmertized landmarks
(
k
l
t
D
matrix)
SIZE AND SHAPE (JOINTLY)
3
k
(a)
(b)
4
3
is lower triangular
Bookstein 3D coordinates
SHAPE:
r
39
40
Shape coordinates
1. FILTER OUT TRANSLATION:
SHAPE SPACE....Kendall (1984)
a) Shift centroid to origin
b) Take linear orthogonal contrasts, e.g. Helmert contrasts
c) Shift baseline midpoint to origin
2. RE-SCALE:
1. Remove location (Pre-multiply by Helmert sub-matrix)
k
l
where th row of the Helmert sub-matrix
by,
is given
@
a) Re-scale to unit centroid size
b) Re-scale to unit area
c) Re-scale to a standard baseline length
d) Re-scale to minimize ‘distance’ to a template
3
&
@
3
3
&
'
3
&
>
3
3
>
@
3
l
@
'
&
<
o
1
1
1
1
1
1
;
,
and the
3. REMOVE ROTATION:
&
@
is repeated
times,
'
3
3
,
a) Rotate baseline to horizontal
b) Rotate to minimize ‘distance’ to a template
times and zero is repeated
.
@
@
'
Note
1
1
1
'
,
,
(centering matrix) so
(centroid size)
l
=
l
k
-
1
Bookstein shape coordinates: 1c/2c/3a
Kendall shape coordinates: 1b/2c/3a
Procrustes shape coordinates: 1a/2d/3b
42
41
Dimensions....
2. Remove size (rescale)
Original configuration:
l
k
1
l
Centered configuration:
is the PRESHAPE (
'
%
%
)
4
F
;
I
;
Preshape:
'
'
,
3. Remove rotation
Shape:
t
'
'
'
,
r
4
'
,
3
is the SHAPE of
.
43
Shape space is non-Euclidean
44
SHAPE SPACES
Write
position where
$
, for the pseudo-singular value decom, and
S
N
%
%
$
F
Assume
sions]
. [ points in
o
F
. Let
Euclidean dimen-
F
¡
¡
;
I
;
I
N
¢
H
I
N
Q
Q
Q
N
©
$
%
¤
,
$
¥
£
¤
R
E
R
R
¡
¡
¨
¨
¡
¢
§
¢
©
%
¢
¦
H
H
K
¤
Q
Q
Q
Q
Q
Q
¢
R
E
R
R
¡
¡
¢
R
¡
§
¢
¦
¢
H
H
K
Le and DG Kendall (1993, Annals of Statistics)
:
is a unit radius
%
-sphere.
t
'
Theorem On
as
,
:
t
, the Riemannian metric can be expressed
£
¤
ª
F
¢
I
is the complex projective space
5
)
.
;
­
­
)
­
­
­
­
D
"
­
®
¢
" ­
®
¢
­ "
°
G
«
¬
«
«
$
G
:
t
has a singularity set
of dimenand is NOT a homogeneous space.
G
G
F
¡
¡
¡
D
z
;
I
G
G
G
¡
¡
D
±
D
G
G
)
sion
t
¡
¡
¡
;
'
H
¢
G
G
H
¯
­
¯
­
¤
"­
®
¢
§
"
®
H
D
%
G
For
spheres.
the space spaces
t
are topological
G
¡
±
­
D
N
¢
²
H
where
H
are co-ordinates for
D
.
%
F
±
;
I
45
Planar case:
dimensional data
t
46
PLANAR CASE: Procrustes/Riemannian distance
t
5
)
Complex configurations
;
r
)
3
3
3
%
j
m
j
m
1
1
1
j
m
-
Helmertized landmarks
·
·
·
3
3
%
%
m
m
1
1
1
m
%
3
3
4
5
>
%
m
j
k
l
j
j
1
1
1
j
;
-
;
Now multiplying by
with centroids
.
·
3
j
¸
¸
#
´
³
t
s
3
s
4
3
µ
4
>
3
z
rotates and rescales
j
Shape distance
satisfies
·
3
¹
j
m
m
. So,
k
·
·
'
'
#
$
%
#
#
*
j
m
¸
j
¸
m
·
3
m
¹
³
m
j
º
º
³
·
·
'
4
5
>
#
*
!
j
k
'
3
j
#
m
*
j
¸
!
¸
m
)
where
is the set representing the SHAPE of . This is a
complex line through the origin (but not including it) in
dimensions. The union of all such sets is the
complex projective space
j
#
m
.
·
#
m
m
'
,
5
)
means the complex conjugate of
·
NB
is the modulus of the complex correlation
between
and
.
¹
·
m
j
m
)
;
NB:
A
:
¹
is the great circle distance on
t
)
,
5
.
r
)
¶
)
;
47
48
Complex configurations
3
3
%
j
m
j
m
1
1
1
j
m
-
Bookstein co-ordinates:
'
&
%
j
m
j
m
@
·
'
>
3
3
3
&
8
1
?
A
1
1
1
'
%
j
j
m
m
Session II
)
Kendall co-ordinates:
Procrustes analysis
Tangent coordinates
Shape variability
Shape models
Tangent space inference
Shapes package.
@
·
&
%
&
3
3
3
&
n
j
j
A
1
1
1
r
;
where
%
3
3
%
j
1
1
1
j
l
j
m
-
;
Linear relationship:
»
»
t
%
8
n
where
.
%
l
!
is lower right
l
t
t
'
'
partition of
l
For
A
:
.
t
·
·
P
P
8
!
A
n
r
49
50
PROCRUSTES ANALYSIS
PLANAR PROCRUSTES ANALYSIS
Juvenile (———) Adult (- - - - - -)
3000
Two centred configurations
, both in
,
u
·
2000
%
•
3
3
•
1
1
1
3
1
1
u
1
¼
, with
5
¼
3
·
%
·
and
u
·
u
1000
•
½
>
½
•
•
•
•
•
• •
•
•
-1000
,
•
y
0
•
•
•
,
•
• •
[
•
u
- transpose of the complex conjugate of ]
½
u
•
•
•
•
Match
-2000
-2000
-1000
0
1000
2000
onto
·
using complex linear regression
u
3000
3000
x
#
À
2000
·
u
o
p
¾
o
¿
o
Á
,
1000
•
•
·
3
o
••
Á
y
,
••
••
3
0
o
• ••
••
• •
•
•
M
-2000
·
3
,
-2000
Á
••
-1000
••
• •
-1000
0
1000
2000
3000
- ‘design’ matrix
- similarity transformation pa
#
M
x
3
o
p
¾
À
¿
¼
rameters
Register adult onto juvenile
51
52
Procrustes match = least squares
Procrustes fit
Minimize the sum of square errors
0
·
·
·
·
·
Â
½
u
½
r
·
½
u
½
3
u
Á
)
'
u
'
Á
1
M
Procrustes residual vector
·
Â
s
u
'
M
Full Procrustes fit (superimposition) of
on
·
Minimized objective function
u
0
·
s
3
>
u
½
u
'
u
·
·
½
½
·
u
½
)
r
(not symmetric unless
#
À
·
½
u
)
·
½
u
Ä
·
Â
·
3
o
p
¾
o
¿
Initially standardize to unit centroid size....
,
M
Ã
Ã
Ã
Ã
where
Full Procrustes distance:
·
u
#
È
À
%
,
½
½
u
Æ
Ç
·
3
u
'
'
¿
'
p
¾
É
À
;
·
u
i.e.
Ã
M
M
M
%
N
N
Ê
N
Ë
Ì
Ì
Ì
Ì
·
u
·
½
½
u
)
Ì
Ì
L
'
Ì
>
o
p
Ì
Í
1
3
¾
·
·
,
Ì
Ì
u
u
Î
½
/
.
Å
/
.
½
Å
Ã
w
Ã
·
·
½
½
u
'
u
3
%
Ã
·
·
½
·
·
½
u
½
u
¿
)
1
L
r
Ã
53
54
d
/2
ρ
FULL Procrustes distance
- full set of similarity
transformations used in matching
Æ
P
Ç
d
F
PARTIAL Procrustes distance
lation and rotation ONLY
- matching over trans-
Æ
Â
1
For fairly similar shapes they are very similar,
as
P
Æ
Æ
Ç
1
P
Æ
o
ρ/2
o
¹
¹
Â
Â
In this course for simplicity we shall concentrate on
FULL Procrustes matching.
Section of the pre-shape sphere
55
56
dF
Procrustes residuals from the match of
different from onto
d/2
ρ
onto
·
are
u
·
2000
3000
u
•
•
1000
•
•
y
•
•
0
1/2
••
••
••
-1000
1/2
•
•
•
•
••
••
••
•
-2000
•
ρ
-2000
-1000
0
1000
2000
3000
x
JUV to ADULT (above):
ADULT to JUV:
w
?
Æ
Ç
1
?
Ï
Ã
'
?
1
?
Ï
1
A
,
,
Ð
Ã
>
¿
Ã
1
.
¿
,
,
Ð
Section of the SHAPE SPHERE FOR TRIANGLES,
illustrating the relationship between
,
and
,
w
1
Ñ
Ò
?
Ó
Ã
A
Æ
,
r
,
,
,
¹
Â
57
58
CONFIGURATION MODEL
Random sample of configurations
the perturbation model
·
·
3
%
Female (left) and Male (right) gorilla skulls
#
À
from
Õ
3
Ô
1
1
1
×
Ø
·
#
#
#
o
3
#
¿
o
3
Á
1
,
200
200
where
#
4
¿
w
1
1
3
Ô
,
- translations
- scales
- rotations
are independent zero mean complex random
#
Ö
3
p
Ö
4
5
t
y
#
100
100
>
#
y
0
0
y
Á
4
5
{
z
errors
is the population mean configuration.
-100
-100
Ø
-300
-200
-100
x
(a)
0
100
-300
-200
-100
x
0
100
AIM: to estimate
(b)
Ø
- the shape of
Ø
Procrustes mean:
Mean shape? Shape variance/covariance?
Õ
/
.
Å
È
"
Ø
Æ
Ø
Ç
·
#
)
3
1
Ù
#
$
%
Ã
59
60
Consider
to be centred:
·
#
.
·
>
#
,
-
(Kent, 1994) Procrustes mean shape
inant eigenvector of
Ø
is the dom
Procrustes fits: match
Ã
to
·
#
Ø
Ã
Õ
Õ
"
"
·
·
·
·
½
½
½
#
#
#
#
3
#
#
j
j
r
#
$
%
#
$
%
Ø
·
Â
·
·
·
·
½
½
#
#
where the
shapes.
·
#
#
3
3
3
p
1
r
1
1
Ô
#
#
, are the pre-
·
#
j
3
3
#
3
3
p
1
r
1
1
Ô
,
,
Ã
%
Õ
NB Arithmetic mean:
.
has same shape as
·
Â
#
$
%
#
*
Õ
Ø
Proof We wish to minimize
Õ
Õ
Ã
Ø
Ø
·
·
½
#
½
#
"
"
Æ
Ø
Ç
·
#
3
'
)
Í
Ø
·
Ø
·
,
#
Î
½
½
#
#
$
%
#
$
%
Ø
Ø
½
Ø
Procrustes residuals
Ø
½
'
Ô
1
r
Õ
"
Therefore,
Â
·
s
#
Â
·
'
,
ÝÞ
3
#
#
3
ßà
3
3
p
1
1
1
Ô
,
#
$
%
Ô
/
.
Å
Ú
Û
Ø
Ø
Ø
½
1
Ü
Ü
$
%
Ù
Ã
Hence, result follows.
62
61
0.4
0.4
0.6
0.6
Procrustes fits (Generalized Procrustes analysis)
••
••••••••••••
•••
••
•••••••••••••
•••••••••••
•• •
• ••••••••••••••••
•
•••••••••••••••
••
-0.6
-0.6
-0.4
-0.4
-0.2
•••••••
••••••••
•••
• •
•••••••••••••
••
-0.2
••••••••••••••
•
• •••••••••
••• ••••• •
••••••• ••••••••••
•••••••••• ••
•
0.0
0.2
••
••••••••••• ••••••••
•••
0.0
•
•••••••••••
• ••••
0.2
•
•••••••••••••••••
••
•••
•••••••••••••
-0.6
-0.6
-0.4
-0.2
0.0
0.2
0.4
0.6
Male Gorillas
Female gorillas
63
-0.4
-0.2
0.0
0.2
0.4
0.6
Other mean shape estimates:
150
Bookstein mean shape
100
h
8
y
0
1.0
50
Take sample mean of Bookstein coordinates
22 2
22222 2
22
222•
22222222
22 222
2
ã
ã
ã
ã
ã
ã
ã
88
88 888
8
88•888888
88
8888
88 8
â
â
â
ã
ã
â
â
â
â
0.5
-50
â
3333
3
33
3
333•333
3333
3
33
3
ä
ä
ä
ä
0.0
-100
ä
7•
ä
4•
-150
v
á
55
55555
555555
555555
5•55 5
å
å
å
å
-50
0
x
50
100
150
å
å
-0.5
-100
å
6 6666
66
66666
66•6 66666
6 66
6
1 1111 66
111
1111
1
1
11 1 1
1
1•1 111
111
-1.0
-150
The male (—-) and female (- - -) full Procrustes mean
shapes registered by GPA.
-1.0
-0.5
0.0
0.5
1.0
u
Female Gorillas
64
65
[In Book chapter 12]
MDS mean shape (Kent, 1994; Lele 1991)
1.0
0.5
88•8 8
88888888
88
8888
8 88
888
88 8
Obtain average squared Euclidean distance matrix
22222 2
2 22222
222
222•
222222 2 2
2
0
%
let
3
333333333•
3333
3333333
333
(centred inner product matrix)
0
'
æ
v
0.0
)
7•
4•
Let
3
%
ç
be the scaled eigenvectors
3
1
1
1
ç
è
-0.5
5
5555
555
5
55555
•5555
5
5
55
-1.0
6
6
6166 6666
16
•6 6666 6
66666
6
1166 6
1 1
1 1• 111
1
11 11
1 1111
1 111
1
-1.0
-0.5
0
0
%
ç
3
3
ç
3
1
1
1
ç
)
0.0
0.5
1.0
(invariant under reflections too)
u
Male Gorillas
IMPORTANT: If shape variations small the mean
shape estimates are approximately linearly related.
i.e. Multivariate normal based inference will be equivalent to first order. (Kent, 1994)
66
67
The partial Procrustes tangent coordinates for a
planar shape are given by
Tangent coordinates
#
À
Ä
(1)
½
'
3
4
3
%
q
Consider complex landmarks
pre-shape
3
3
%
j
m
j
m
1
1
1
j
m
¼
q
with
+
Ö
Ö
j
Ö
;
/
.
Å
. Partial Procrustes tangent
where
coordinates involve only rotation (and not scaling) to
match the pre-shapes.
w
'
½
Ö
j
Ã
%
3
3
%
¼
j
j
1
1
1
j
m
l
m
j
l
j
1
r
;
Let be a complex pole on the complex pre-shape
sphere usually chosen as an average shape.
Ö
Note that
and so the complex constraint
means we can regard the tangent space as a real
subspace of
of dimension
. The matrix
is the matrix for complex projection
into the space orthogonal to . Below we see a section of the shape sphere showing the tangent plane
coordinates.
½
>
q
Ö
Let us rotate the configuration by an angle to be as
close as possible to the pole and then project onto
the tangent plane at , denoted by
. Note that
minimizes
.
w
Ö
/
.
Å
Ö
#
w
À
½
'
Ö
'
j
Ö
j
)
Ã
t
'
)
)
;
'
½
%
+
Ö
Ö
;
Ö
69
68
PROCRUSTES TANGENT SPACE
Procrustes tangent co-ordinates
:
of
at the pole
v
ze
'
é
¹
iθ
iθ
ze β
where
is the Riemannian distance between the shapes of
and , and is the optimal
Procrustes rotation to match to .
t
>
{
y
γ
z
¹
vF
r
é
T
M
RX
cos ρ
A diagrammatic view of a section of the pre-shape
sphere, showing the partial tangent plane coordinates
and the full Procrustes tangent plane coordinates
. Note that the inverse projection from to
is
given by
q
#
À
Ä
Ç
q
q
j
#
À
%
Ä
(2)
½
'
3
q
j
q
o
)
4
5
q
Ö
j
L
)
1
;
,
The rays from the origin in Procrustes tangent space
correspond to minimal geodesics in shape space.
70
Hence an icon for partial Procrustes tangent coordinates is given by
.
ê
l
¼
j
71
-0.54-0.48
0.07 0.10
-0.10 -0.06
-0.18 -0.10
0.14 0.17
0.1450.170
•
•
•
•
•
•
•
•
•
•
•
•
• •• • • •
•
• •
• • •
•
•
•
•
•
• • •• •••
•• • • •
•••• •
• •• •• • • ••• ••• • ••• • •
• ••• ••• •
• •••••
•••••
••••••• •
•••••••••••
• ••••••• • • •••••••• •• • •••••• •
•• ••••• • ••• • •• • • ••••••• •
• •• •
• • ••
• ••• • • • •• •••• •••••• •• • ••• ••• •• •
•• •
••
•• • •
• ••• • •• •
••••
••
• •• •
• •••
•••
• • ••
•• •••
•
•
• • • •
•
•
• • •
•
•
•
• ••
• ••
• ••
•
•
•
••• •
• •• •
•••
• •• •
•• ••
• • •• •
•
• ••
• ••• •• •• • • ••••
•
•• • •
••• • • ••••••••••
•
•
•
••••••• •• • ••••••••• • • ••••••
•
•
•
•
•
•
•
•
•
•
•
•
•
•
•
•
•
•
•• ••••••••• • • x1 • •• •••••••••• •••••••• ••• •
•
•
•
•
•
•
•
•
•
•
•
•
•
•
•
•
• • ••
• • • • ••• • • • • •• • • •• •
•• • •
• ••
•• •
•
•
•• •
• •• • ••
• ••
•
• ••
• ••
• •• • ••
•
•• •
•••
• • ••
•
•
•
•
•
•
•
• •
•
•
•
• • ••
• •• •• •
•• •• • • • • • • ••
• •• •
• •
• •
•• •
••••••• • •• ••••••
••• • • •••••• • ••• •••••• • ••••• •••
• •••• • •
••••
• • ••
•• •••• • • • • ••••••••• •• ••••••••• • ••••••••
•• ••••••••
••••• •• • x2
• •••• •
• ••• • • • ••• • • • ••
• •••••••••
• ••• •
•••••
• • ••
• ••• •• •
• •• •
• •• ••
• •• •• •
• •• ••
•••• • • •••••
•
•
•
•
•
• •
•
•
•
•
•
•• •
•
•
•
•
•
•
•
•
•
•
•
• •
•• • •
• •
• •
• •
• •
••
• •
••
• •
•••
••
• •
• •
•
•
••
•
••
••
••
••
•
•••••• •• • ••• • • • • ••• ••• •
x3 • • •••••••• •• •• ••••••• •• • • •••••••••• •• • ••• ••••••••• •••••••••••••• • ••••••••••••• • •••••••••••• •••••• • ••••• • • • • ••••• •• ••••
••• • •• •••••
•••••
••
• •
•• •
•• • • • • • ••
• • •
•••
•• •
• • •
•••
• ••
••
••
•
•
•
•
••
••
• •
••• •• •• • •••• •• • • • •••••• •
• •• •••• •• • •••• •• •• •• • ••• • •••• • • ••
• ••••• • • • •• •••• • • •• •••• •• •••••• • ••
• •• •• ••••
•• •
•
•
• •••
• ••
•• •• • •
•••
•
• ••••• • • •••••••
• • ••• ••
• •• •• •• • •• •••• • • • •••• ••• •••• ••••
• •• ••
• ••• • • ••• • •• • • • •• •• • x4
• • •• • • ••••••
• • • • •••
••
•
• • •• •
•
•
•
•
•
•
•
•
•
•
•
•
•
•
•
•
•
•
•• •
• ••• ••
••••
••• • • •• • ••• • •
•
• ••
••• ••• • •••• •• • ••••• •
••• •• • •••• •••••
• • • •••
••• ••• •
••• •••••••• • • •••••• • • •••••••• •• • • ••• ••••
•••
•• •••
• •••• • •
••• • • • ••••••
•
•
•
•
•
•
•
•
•
•
•
•
•
•
•
•
•
•
•
•
•
•
•
•
•
•
• •••
• ••• • x5
••• • •
•• • • •
••• ••
• •• • •
•••••
••• • • • •• • • • ••• •• • • • ••••
•
•
•
•
•
•
•
•
•
•
•
•
•
•
•
•
•
•
•
•
•
•
•
•
• ••
•• •
• ••
•• •
• ••
•• •
••• • • •
•• •
•• •
•• • • • •
•
• •• ••• •• •• •• •• • x6
••••••• •
•• •
••
• ••••• •
•• •••
• •••••• •••• • • •• •• ••
••••••••
• • •• • ••••••••• • • •• ••••• •• • ••••••••••••••
•• • •••
• •• •••••• • • •••••••• • •••••••••• • ••••••• •• ••
••••••••• • •••••
••• ••• • • • ••••
••
••
• •
•
•
•
•
•
•
•
••
•
••
• • • •
• •
•
••
••
• •
••
•• • •
••
•
• ••••
•• • • ••
••• •• • •••• • • •• •• ••• • • •••• •
•• • • •••• ••
•
••••• ••• • ••••• ••
••••• • •••
•
•
•
•
•
•
•
•
•
••
•
•
y1
•
•
•
•••• •• •• ••• ••
•
•
•• •• •••
••••• •• •• •••••
• •••••
•••••••••
• •••••••• •
• •••••••• • •••••• • • ••••••• • •
•
•
••••••• ••
•
•• • •
••• • • •••
••
••
•• ••• • • •• •
•••
•
• •
••
•• ••
•
•
•
•
•
•
•
•
•
•
•
•
•••
• ••
•
• •
••
••
••
•• • •
•• ••• • • •• •••
• •••• ••
•••
• ••••••
••• • •
••••
• • ••
•
y2 ••••••••••••• • • • ••••••••••• ••••• ••• ••• • • •••• ••••• ••••••
•••••••••• ••
••••••••• •
••••• •
••• ••• • •••••••• •
•••••••• • ••••••••• •
•••••••• •
•
•
•••
•
•
•
•
•
•
•
•• •
• • •
• ••
• •• • ••
•• •
• • •
•
• • • •• •
••
••
••
••
• • •
••
•
•
•
•
• •
•
••• •
•
• • ••
•
• • •• •
••
• ••
• • •
• • • ••
• ••• • ••••• • • • •
• ••• ••
•••• • • • • • •
•••
•• • •••• • ••••• •
• ••• •
y3 •• ••••••••••••• ••••••• ••••••••• • •••••••• • •••••••
••• ••••• • ••••• •••
••• •• •
••
•• ••• •• • • • •••• • • • ••• ••• • • •• •••••• • ••••••••••
• •
••
••
• •••• •
•
•
• •
•
••
••
••
• •
•
•
••
•
• •
•
• ••
• •
•
••
••
••
• • •
•
•
••
• ••• •
•••••••
• •••••• •
•••• ••• • ••• • ••
••••••• • • ••••••
•••• ••
•••••• •
• ••• ••• • • •••••• •••
• • •••••
•
•
•
•
•
•
•
•
•
•
•
•
•
•
•
•
•
•
•
• •
•••••
••
••••••
• •••
• • ••
• •••
•••••
••••
••••
••••• • •
• • •• •
••••••
• • • ••• •••
•••• •
••
•
• ••••
••• • • •• • • • ••
• ••
• y4
••
• ••
• ••
• •• • ••
•
•• •
• •• • ••
• ••
•
•••
•• •
• • ••
•
•
•
•
•
•
•
•
•
•
•
•
• •
••••• •
•
•• •• ••• • •••• • • ••• •••
• • •••• •
•
•••• •• •
• •••• ••• • ••••
•• • • •
• • •
• •• • •
••••• • •••••••• •• •• ••••• ••
••• •• • •• ••••• •
•••• • • •• • • • •• • •
• •
y5 • • •••• •••
•
• •
••
••
• • •••• • •• ••• • • ••••••
•
••••••• • ••• •••••• • •• ••••••• • •••• •• •••
•• • •
••• • • • •
• • • •••••
• •••• • •• ••• • •• • • • •••• • •
• • ••
•••
•
• ••• • • ••• • ••• •
• • • • ••
•
•
• • •• • • ••• •• • ••• • •
•• •••••
• ••• • •
•• • ••••• • ••• •••
• ••
• •• ••
••
•
•••
• •
•
•• •
•
•
•
•
•
•
•
•
•
•
•
•
•• • • • •• • • •• •• • • •••• • • •• •• • ••••
• • • •••• • • ••
•• ••
••• •
•• •
•• •
y6
••
•
• • • • • • •••
•••••• • • ••• • •• • • •• •• •••
• •• • ••• • • •• •••
• •••• • ••• •
••• • •
• •• •• • •
•• •
•• •
•• •
• ••
•• •
•• • • • •
• ••
••
• ••
•• •
•• •
165 180
0.46 0.52
-0.02 0.02
-0.05 0.0
-0.18 -0.10
0.34 0.44
-0.47 -0.44
165 180
ë
ì
+
++
++
++
++++
++
-0.6
6
-0.4
-0.2
0.46 0.52
-0.18 -0.10
0.34 0.44
2
0.1450.170
1
0.14 0.17
0.0
-0.2
+
++
++
++
+++++
+++
++
-0.4
+++
++++++++
++++++
-0.6
-0.05 0.0
-0.10 -0.06
+
+++
+++
+
++
++
3
-0.18 -0.10
0.4
0.2
++
+
++
++
++
+
+
+
5
-0.020.02
0.07 0.10
4
+
++
+++
++
+
+
+++
++
+
++
ë
-0.47 -0.44
0.6
-0.54-0.48
s
0.0
0.2
0.4
0.6
Pairwise scatter plots for centroid size ( ) and the
coordinates of icons for the partial Procrustes
tangent coordinates for the T2 vertebral data (Small
group).
Icons for partial Procrustes tangent coordinates for
the T2 vertebral data (Small group).
3
2
u
72
73
The Euclidean norm of a point in the partial Procrustes tangent space is equal to the full Procrustes
distance from the original configuration corresponding to to an icon of the pole
, i.e.
q
j
m
q
l
Æ
¼
Ö
For practical purposes this means that standard multivariate statistical techniques in tangent space will be
good approximations to non-Euclidean shape methods, provided the data are not too highly dispersed.
Ç
3
q
m
¼
j
l
Ö
1
Important point: This result means that standard multivariate methods in tangent space which involve calculating distances to the pole will be equivalent to
non-Euclidean shape methods which require the full
Procrustes distance to the icon
. Also, if
and
are close in shape, and
and
are the tangent
plane coordinates, then
Full Procrustes tangent coordinates
Ö
An alternative tangent space is obtained by allowing
scaling by
of the pre-shape in the matching
to the pole . In the above section
%
l
¼
Ö
>
¿
%
q
q
)
)
Æ
%
q
'
Ç
%
3
Æ
%
3
%
Ö
3
q
í
í
¹
í
)
Â
)
)
)
(3)
74
1
j
- sample covariance matrix of some tangent coordinates ,
O
Shape variability
#
q
Õ
Overall measure
"
,
#
'
#
q
q
'
q
q
O
(
(
¼
#
$
%
Ô
%
where
.
#
q
q
*
(
Õ
Õ
%
"
Æ
Ç
Æ
Ø
Ç
·
#
é
Ô
3
)
- eigenvectors of
with eigenvalues
1
;
: principal components (PCs),
&
#
$
%
O
Ö
Ã
³
³
%
³
1
1
>
1
è
)
Æ
Ç
Ç
î
ï
ð
ñ
î
>
>
PC score for the th individual on the th PC is:
@
é
1
p
@
ò
#
Æ
Ç
ï
ð
ñ
&
'
#
3
3
3
3
3
ó
3
î
&
q
q
p
(
¼
>
>
Ö
1
1
1
Ô
1
1
1
,
?
PC summary of the data in the tangent space is
1
>
,
é
PCA in tangent space to shape space
è
"
ò
#
#
q
q
&
3
&
o
(
Ö
&
- PCA of Procrustes residuals
- PCA of Procrustes tangent coordinates
(project so to obtain part that is orthogonal to
its rotations)
- NB for observations close to we have
$
%
Ø
·
Â
s
'
#
#
for
Ã
#
3
.
3
p
1
1
1
Ô
q
s
,
and
Ø
#
Standardized PC scores:
Ã
%
³
Ø
s
#
ô
@
ò
#
&
#
&
3
3
3
3
3
ó
#
p
q
&
)
í
1
1
1
Ô
1
1
1
1
L
r
,
,
Ã
75
76
Mouse vertebra example: (PC1 = 69%)
Mouse vertebra example:
0.6
Procrustes registration for display
4
+
++
++
++
+++++
+++
++
1
2
-0.6 -0.4 -0.2 0.0
+
++
++
++
++++
++
-0.6
6
5
-0.4
-0.2
0.0
0.2
0.4
•
•
77
0.4
2
•
0.0
(a)
0.6
3
1
•
-0.6 -0.4 -0.2
-0.6
õ
•
6
0.2
•
0.2
0.2
0.0
+++
+++++++
++++
+++
-0.4
-0.2
•4
-0.6 -0.4 -0.2 0.0
+
+
++++
+
+++
3
0.6
0.6
++
+
++
++
+++
+
+
5
0.4
0.2
0.4
+
++
+++
++
+
+
+++
++
+
++
0.4
0.6
•
•
•
•
•
-0.6 -0.4 -0.2
0.0
0.2
0.4
0.6
(b)
78
Mouse vertebra example: (PC1 = 69%)
Bookstein registration for display
Important:
If using Bookstein superimposition to calcuate
then
strong correlations can be induced.....can lead to misleading PCs
-0.4 -0.2 0.0 0.2 0.4 0.6 0.8
-0.4 -0.2 0.0 0.2 0.4 0.6 0.8
O
4
•
5
3
•
•
1
2
•
•
•
6
•
•
•
•
•
No problem with Procrustes registration, Kent and Mardia (1997)
•
-0.6 -0.4 -0.2 0.0 0.2 0.4 0.6
-0.6 -0.4 -0.2 0.0 0.2 0.4 0.6
(a)
(b)
79
T2 small vertebra outlines
80
5
++++++
++
+++
++
+
0.0
Æ
-0.3 -0.1 0.1
-0.3 -0.1 0.1
0.3
-0.3 -0.1 0.1
0.3
0.3
0.3
•••
•• ••
•• •
•••• ••••
•••
•••••••
••
••••
•••••••••••••
-0.3 -0.1 0.1
ö
-0.3 -0.1 0.1
•••••
•• ••
•••• ••
••••• ••••••
••••
••
••••
••••••••••••
-0.3 -0.1 0.1
••••
•• ••
•••• ••
••••• •••••
••••
••••
••••
•••••••••••
-0.3 -0.1 0.1
-0.3 -0.1 0.1
0.3
0.3
0.3
0.3
-0.3 -0.1 0.1
0.3
0.0
0.1
0.3
••••
••• ••
••••
•••• ••••
••
••••••••
•••••• •••••••••
••••
-0.3 -0.1 0.1
0.3
0.3
-0.3 -0.1 0.1
0.3
0.3
0.3
0.3
-0.3 -0.1 0.1
••••
•• ••
•••• ••
••••••••• •••••
•••
••••
••••••••••••
-0.3 -0.1 0.1
ö
0.3
-0.3 -0.1 0.1
0.3
•••••
•• •
•••• ••
••••••••• •••••
•••
••••
••••••••••••
-0.3 -0.1 0.1
-0.3 -0.1 0.1
•••••
•• •
•••• ••
••••• •••••
••••
•••
••••
••••••••••••
-0.3 -0.1 0.1
0.3
0.3
0.3
-0.3 -0.1 0.1
••••••
••••
•••• •••••
•••••
••••••••
••••
•••••••••••••
-0.3 -0.1 0.1
0.3
••••••
••• ••
•••• ••••••
•••••••
••••
••••
•••••••••••••
-0.3 -0.1 0.1
0.3
-0.3 -0.1 0.1
6
-0.1
••••••
••• ••
•••• ••••••
••••••••
••••
••••
•••••••••••••
-0.3 -0.1 0.1
0.3
-0.3 -0.1 0.1
-0.1
1
-0.2
-0.3 -0.1 0.1
•••••••
•••• •••
•••••• •••••
••••
•••••
••••
•••••••••••
++ +
++
++++
++++
++
++ +
-0.2
••••••
••
••• ••
•••••••••• ••••
•••••
••••
••••••••••••
-0.3 -0.1 0.1
0.3
0.2
Ç
>
0.3
•••••
••••••••
••••••••• •••••
••••
•••
•••• ••••••••
•••
2
+
+++
++
+
++
+
+
++++
++
+
++++
+++
++
++++
é
•••
•••••••••
••••••••• ••••••
••••
••••
•••• •••••••
•••
-0.3 -0.1 0.1
3
++++++++
+
+
+++
-0.3 -0.1 0.1
0.1
-0.3 -0.1 0.1
0.3
4
+++
++
+++
++
++++
++
++
+
0.3
0.2
PC1: 65%
PC2: 9%
>
1
Ò
81
82
-0.3 -0.2 -0.1
0.0
0.1
0.2
0.0
0.1
0.2
0.3
0.2
0.3
-0.3 -0.2 -0.1
(a)
0.3
-0.3 -0.2 -0.1
0.0
(b)
0.1
+++++++
+
+
+
+
+
+
+
+
+
+++ +
++
+
+
++
++
+
++
+++++
++
++ +
++
++
+
++
++
+++
+++++++
-0.3 -0.2 -0.1 0.0
0.1
+++++++
+
+
+
+
+
+
+
+
+
+++ +
++
+
+
++
++
+
++
+++++
++
++ +
++
++
+
++
++
+++
+++++++
0.1
++
+
+
+
+
+
+
++
•+••••••••
+++
+
••+
++
++
++
++
+••••••
••+•+
+
+
+
+
++
++
•••++
+
••••
++
++
+• +
+
••••
+
•+
+
••+
•++
+
+
+
•
•
•
•+•
+
+
+
+
•+•+•
•+
•+
+
+••++
•
+
•
+
+
•
+
•
+
+
•+
•+
•+
++
+•+•+•+•++
+
•+•+
•
+
+
•
+
•
•
•
•
•+•+
•
•
++
•++
•••+
••+•+
•+••+
•+
••+
•••++
•++
•+
•++
•++•++•+
••+
•++
•+
•+•+
+
•
•
•
•+•
•
• ++
•+
++
+ ++
•++
•+
+•++•+
•••••
++++
++
-0.3 -0.2 -0.1 0.0
0.2
0.1
-0.3 -0.2 -0.1 0.0
0.3
0.2
0.3
0.3
0.2
0.1
-0.3 -0.2 -0.1 0.0
++
++
+++++
+
+++
+
+
+++
++++
+
++
+++
+
++
•••+
++
+++
•
+
•
+
•+
+
+
+
••••••••••+
•
+
•
•
+
•
•
•+
+
+
+••+•••+
+
••+
••••••
•+
•+
•••+•••++••+
•+
++•+
••••••
••••••• ••••••+••+•+•+
++++++ +++++•+•+
•••++•+
• •+•+++++++++++ +++++
•••••• •
++
++
+
•••+•+
•
++
++
++++
++•••••+
++++
+
•••+
•+•••••••
••+
•+•+++
++++
+++
+
•++
• •••
••+•+•+•+•+
++
+++
•+•++
+
•++
++
+++
+
•
++
•+
++
•+•+
+
••••++•+•
+++++
•++
+++
•++
• •+++••••
0.2
0.3
-0.3 -0.2 -0.1
0.0
(a)
0.1
0.2
0.3
(b)
83
84
Pairwise plots:
-1.5
+
÷
-1.0
+
++
+ +
+
+
s
+
+
0.0
0.5
1.0
1.5
+
+
+
+
+
+ +
+++
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
-0.5
+
+
+
+
+++ + + +
+
+
+
+ +
+
+
+
+ ++
++
+
+
+ +
+
+
++ + ++ +
+
+ +
+
+
+
+
+
+
ø
+
+
+
480 500 520 540 560 580 600 620
0.04 0.05 0.06 0.07 0.08 0.09
+
+ +
+
ø
+
+
+
0.04 0.05 0.06 0.07 0.08 0.09
++
++
+
++
+++
+
+
+
+
+
+
+
+
+++
+
+
+
+++
++
+++
++++ +++
+
+++++ +
+
+
+
+
+
+
+ +
+
+
++
+ +
+
+
++
+
+
+
+ +
+
++
+
+
+
+
+
+
+
+
ù
+
0.5
+
+
+
++ +
+
+
+
+
+
-0.5
+
+
++
-1.0
+
+
+
+
+ +
+
+
score 2
+ +
+
+
+
+
+
+
+
+
+
+
+
+
++
+
+
+
+ +
+
+
+
+
++
++
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+ ++
+
+
+
+
+
+
+
+
+
+
++
+ +
+
++
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
++ +
+
+
+
+
score 1
+
+
+
+
+
+
+
+
+
+
+ +
+
+++
0
+
+
+
+
+
+
+
-2
+
+
1
+
+
+
+
+
1.0
+
+
+
+
+ ++
+++ +
+
1.5
+
ù
+ +
+
+
+
+
+
+
+
+
+
2
0.2
+
+
+
+ ++
++
++
+++
+
+
+
+
+
+
++
+
+
+
+
+
+
+
+
+
+
+
+
+
+++
+
+
+
+
++
+
+
+
+
+
+
+
+
+
+
ù
score 3
+
+
++
-1
+
+
+
0
(b)
+ +
++ +
+
+ +
+ +
+ + +
1
ÿ
+ +
+
+
+
ú
û
û
+
+
+
+
+
+
û
480 500 520 540 560 580 600 620
+
-2
-1
0
1
+
-2
0.0
+
+
+
+
+
+
(a)
+
+
+
-1
+
+
-0.2
+
+
+
+
+
+
+
-1.5
0.2
+
+
+
+
+
+
+
+
+
+
+
+
+
+
2
+
+
+
+
+
+ ++
+
+
+
+
+
+
+
+
+
+
+
+
+
+ +
+
dist
+
+
+
+
+ ++
+
0.0
+
+
+
+
-0.2
+
+
+
+
0.0
0.0
0.2
+++
+
++++
+
+
+
+
+
+
++
+
+
+
+
+++++ ++++
+++
++
++++++ ++++
++++ +++
-0.2
-0.2
0.0
0.2
+
+
+
ü
2
-2
-1
ý
0
þ
1
ü
2
Size, shape distance, PC scores 1, 2, 3
85
86
Pairwise plots:
-10 0 10 20 30
-30
-10 0 10 20 30
-30
-10 0 10 20 30
-30
-10 0 10 20 30
-10 0 10 20 30
0.2 0.3 0.4 0.5 0.6 0.7
-30
•
• • ••
••• • • •
• ••
•• •
• •
•• •
•
•
-10 0 10 20 30
-10 0 10 20 30
•
-10 0 10 20 30
-30
-10 0 10 20 30
-10 0 10 20 30
-30
-10 0 10 20 30
2
1
-1
-30
-30
-30
-30
-10 0 10 20 30
••
•
•• •
•
•
•
• ••
•• ••
•••• • •
•
•
•
•
•
•
-10 0 10 20 30
-30
-30
-10 0 10 20 30
-10 0 10 20 30
-10 0 10 20 30
•
-30
-10 0 10 20 30
-30
-10 0 10 20 30
••
•
•• •
••
••
• •• •• • •• • •
• •
•
•
•
•
•
••
•
• •
•
•
•
•
•
•
•
•• • •
• • • •• ••
•
•
• •
•
•
•
•
•
•
ù
•
55
50
•
•
•
•
•
•
•
• •
•• ••
•
•
•
•
•
ÿ
•
•
•
•
• •
•
••
•• •
•
•
•
45
•
•
• •
•
•
•
•
••
•
•
• •
•
•
•
• ••
•• ••• • •
• ••
•
•
••
•
•
••
•
•
•
•
•
•
•
•
•
•
•
•
•
•
•••
• •
• • • • ••
•
• • •
• • • ••
•
•
40
•
•
•••
•
•
•
•
•
• •
•
• ••
• •
• • • ••
•
score 2
•
••
•
••
•
•
•
•
•
•
•
•
•
•
•
•
• ••
•
• •
•
•
•
•
•
•
• •
•
•
•
••
•
•
•• •
• •
• •• •• • •• •
•
•
•
• •
•
•
•
•
•
ø
•
••
•
•
•
•
•
•
•
• •
•• • •
• • •••
• •
•
•
•
•
2
1
-10 0 10 20 30
•
••
•
•
•
••
••
•
•• • •
• •
••• • •
••
•
•
•
•
•
•
• ••
• •••
•
• •
•
•
•
•
•
•
•
•
••• • ••
•
•
•
•
• •
• •
•
••
•
•• •
•
• •
•
•
•
•
•
•
•
•
•
•
•
•
• • •
•
•• •
••
•
•
•
• •
• • ••
•
• •
•
•
••
•
•
••
•
•
•
•
•
•
•
• •
•
•
•
••
•
ù
score 3
•
•
•
•
•
•
•
••
•
•
•
•
•
ÿ
•
•
•
•
• •
••
•
•
•
•
••
•
•
•
•
•
•
•
• • •
•
•
•
•
•
•• •
••
•
•
•
•
• •• •
•
• ••
• ••
•
•
•
•
•
•
• •
•
•
•
•• • •
• •
•
•
•
•
score 4
•
• ••
•
• •
•
• •
•
•
• ••
•
••
••
•
• •
•
• •
•
••
•
• ••
•
•
• • •
•
•
•
•
•
•
••
••
•
•
•
•
• • •
• ••• •
• • •
• •
•
•
•
• •
••
•
•
••
•
•
•
••
•
• • •••
••
•
•••• •
•
•
•
•
•
•
• • •
•
•
• ••
• • •
•
••
•
• •
•
••
•
•
•
•
•
• •
•
••
•
• •
• •• ••
•
••
• ••
• •
•
•
•
•
•
•
•
•
•
•
•
•
0
-30
•
••
•
•
•
ÿ
-30
-30
-1
-10 0 10 20 30
-30
-10 0 10 20 30
•
•
•
•
•
•
•
•
•
•
•
-2
-30
-30
-30
-10 0 10 20 30
-10 0 10 20 30
-10 0 10 20 30
-30
• •
• • •
2
•
••
•
•
•
• •
• •
•
•
•
•
•
•
•
•
•
•
•
•
•
•
•
••
•
• • •••
••• • ••
•
score 1
•
•
•
••
•
•
•
•
••
•
•
•
••
• • ••• •• •
• ••
•
•
• •
• •
•
•
•
•
•• • •
••
••
•
•
ü
1
•
-2
-30
-30
-30
-30
-10 0 10 20 30
••
••
•
•
•
•
•
•
ù
•
•
ÿ
0
-10 0 10 20 30
-10 0 10 20 30
-10 0 10 20 30
-10 0 10 20 30
-10 0 10 20 30
-30
-30
•
•
• •
•
•
•
••
•
• ••• •
•••••• ••
•• • •
• •
•
•
•
•
•
•
•
•• • •••
•
• • • ••
•
• ••
••
•• •
•
•
•
•
••
• •
•
• • ••• • •
• ••••• •• •
0
•
•
•
•
• •
•
•
•
•
• •
• • •
•
• •
• • •
• •
•
• •
•
•
•
•
•
•
•
-1
•
•
•
•
•
••
•
•
•
•
••
•
••
•
•
• •
•
•
•
•
•• • • •
• •
• •
•• ••
•
•
•
•
•
•
•
-2
•
•
••
•
••
35
-10 0 10 20 30
-30
2
•
•
• •
•
•
•
•
• • •• •
• • ••
•
••
•
•
ü
1
•
•
••
•
dist
•
þ
0
•
•
••
•
••
•
-1
•
•
•
•
•
•
•
•
-30
-10 0 10 20 30
-30
-10 0 10 20 30
-30
-10 0 10 20 30
-30
-10 0 10 20 30
-30
-10 0 10 20 30
-30
-30
-2
•
•
••
•
•
•• •
•
•
• •
• •• • •• •
•
•
• ••
• •
s
3
-10 0 10 20 30
2
0.2 0.3 0.4 0.5 0.6 0.7
-30
1
-10 0 10 20 30
0
-10 0 10 20 30
-30
-1
-10 0 10 20 30
-30
-10 0 10 20 30
-30
-2
-10 0 10 20 30
2
-30
1
-10 0 10 20 30
-30
-10 0 10 20 30
-30
-10 0 10 20 30
-30
0
-10 0 10 20 30
Size, shape distance, PC1: 50%, PC2: 15%, PC3:
13%, PC4: 8%, PC5: 4%
-1
-30
-30
-10 0 10 20 30
-30
-30
-10 0 10 20 30
Digit 3 data
•
•
•
•
•
2
•
ÿ
•
•
•
•
• ••
•
•
• •
••
• •
•
•
•
•
•
•
••
•
•
•
•
-10 0 10 20 30
-30
-10 0 10 20 30
-30
-10 0 10 20 30
-30
-10 0 10 20 30
40
45
•
•
••
50
55
•
ú
•
•
-2
-1
•
•
•
•
••
•
•
û
•
•
•• •
•
• •• •
•
•••
•
•
•
0
þ
1
2
•
•
•
•
• • • • • •
• •
••• • • •
• •
•
•
•
•
•
•• •
•
•
•
•
•
•
•
•
•
• ••
•
•
•
•
•
•
•
• ••
•
•
•• • •
•
• •
•
•
•
score 5
•
•
•
3
• •
• •
•
• •
0
•
•
•
•
35
•
•
•
• •
• •• • • • •
•
•
••• •
•
••
•
-1
••
•
-1
0
1
ü
-2
-10 0 10 20 30
•
•
•
2
-2
ý
-1
0
1
2
-30
-10 0 10 20 30
-30
-10 0 10 20 30
-30
-10 0 10 20 30
-30
-10 0 10 20 30
-30
-10 0 10 20 30
-30
-30
-10 0 10 20 30
-30
-10 0 10 20 30
Æ
Ç
t
>
é
1
Ñ
-0.4
+
+
+
0.4
+ +
-0.4
0.0
0.4
-0.4
0.4
0.4
-0.4
0.0
0.4
0.0
0.4
+ + +
+
++++
+
+ + ++
-0.4
0.0
0.4
-0.4
0.0
0.4
+ + +
+
++++
+
+ + ++
-0.4
0.0
0.4
0.0
0.4
++
+
+
+
++
+
+
++ + +
-0.4
0.0
• •
++
• • •
-0.4
-0.2
0.0
++ •
+
+ +
•
+
•+
• +
+
• +
•
+
+
+
+
•
+
•• +
+
••
•
•
++
•
•
• +
•
•
-0.4
0.0
• •
+ + + •+ +• +• • ••
• •
+ + +
•
+++
+
++•••+
++
• •• •+• •
•
• •• • • +
•
•
•
-0.2
0.4
0.0
-0.4
0.4
-0.4
0.0
+ +
+
+
+
++
+
+
++ ++
+
+
+
+
++ +
+
+
+ +
+
-0.4
0.4
0.4
0.0
-0.4
0.4
0.0
0.4
0.4
0.0
0.0
0.0
-0.4
+ + +
+
+
+ ++
+
+ + ++
-0.4
-0.4
-0.4
0.4
0.0
-0.4
0.4
0.0
-0.4
0.4
+ + +
+
+
+ ++
+
+ + ++
+ + ++
+
+
++ +
+
+ + +
-0.4
0.4
0.0
0.4
0.0
-0.4
0.0
-0.4
++ +
+
+
+ ++
+
+
+ + +
+ + +
+
+
+ ++
+
+ + ++
+ + +
+
++
++
+
+
+ + +
-0.4
0.4
0.4
0.4
0.0
0.0
0.0
-0.4
-0.4
-0.4
0.4
0.4
0.0
-0.4
0.0
+ + +
+
+
+ ++
+
+
+ + +
+ + +
+
+
+ ++
+
+
+ + +
-0.4
0.4
0.4
0.4
+ + ++
+
+ ++
+
+
+ +
0.0
0.0
0.4
0.0
0.4
0.0
0.0
0.0
-0.4
+
+
-0.4
-0.4
0.4
+ + ++
+
+
+ ++
+
+ +
0.0
-0.4
0.4
0.4
+ ++
+
+ ++
+
+
+
+ +
+
-0.4
+
0.0
0.4
+ + ++
+ ++++
+ + +
0.0
0.0
0.4
-0.4
-0.4
+
+
0.0
0.0
0.0
+ + ++
+ ++++
+ +
-0.4
-0.4
0.4
0.4
0.0
+
-0.4
0.4
+
+
-0.4
-0.4
0.0
0.4
-0.4
+ +
++
+ ++
+
+
+
+ +
0.0
+
+
-0.4
0.4
-0.4
0.0
+ +
+ ++
++
+
+
+
0.4
+
+
+
+ ++
+
+ +
+
+
0.2
0.4
• •++++•••
+
+
+
+
•
-0.4
•
•
-0.2
0.0
0.2
•
•
+
• • • +++
+
++
•+
••
+
+
+
+
•
•
•
++
++
••
•
•
++++••
•••++++
• • • + +++
••
• •+
••• ++
• +
+
•
+
+ + ++ +•••
+
++
+
+
•• •++
++
0.2
0.4
+
0.0
0.0
0.0
0.4
0.0
+
0.4
+
+
+
+
•
++
•
++
•
••
•
+
••• +++
•+ •
•
+•+
+
+• +
+
+
+ +
++++•••
++
••
++
-0.2
-0.4
0.0
+ + +
+
+
+ ++
+
+
+ +
+
++++
+
-0.4
0.4
0.4
•
••
++
++
-0.4
0.4
0.0
+ + +
0.4
0.0
+
+
+
-0.4
0.4
0.0
-0.4
0.4
+ + +
+
+
+ ++
+
+
+ +
+
-0.4
-0.4
++
+
+
+
0.2
0.4
0.4
+
0.0
0.0
0.0
0.0
0.4
0.0
-0.4
0.4
+ + +
+
+
+ ++
+
+ + ++
-0.4
-0.4
-0.4
-0.4
0.4
0.4
+
-0.2
0.0
0.0
0.0
0.4
0.0
+++
++
+ ++
+
+
++ +
-0.4
-0.4
-0.4
0.4
0.0
-0.4
0.4
0.0
-0.4
0.4
0.4
0.4
+ + +
-0.4
0.0
0.0
+ + +
+
++++
+
+
+
+ +
0.4
-0.4
-0.4
+ + +
+
+
+ ++
+
+
+ + +
88
0.2
0.4
0.4
+++
+
+
++
+
+
+
++ +
0.0
0.0
0.0
++ +
+
++
+ +
+
+
+ + +
0.0
0.4
-0.4
-0.4
-0.4
0.0
+ ++
+
+
+
++
+
+
++ +
-0.4
0.0
0.4
0.4
0.0
0.4
-0.4
++ +
+
+
+ ++ +
+
+
+ +
-0.4
+ +
-0.4
++ +
+
+ + ++
+
+
+
-0.4
0.0
0.4
87
-0.4
-30
•
••
• •
•••
•
•
1
•
•
• •
•
-0.4
-0.2
+
+
+
+
•
•
+
+
••
0.0
++
••
•
•
0.2
0.4
0.4
+ + +
++++ +
+
+ + ++
-0.4
0.0
0.4
89
90
HIGHER DIMENSIONS
Ordinary Procrustes analysis (match
tred)....Minimize:
0
to
%
- cen
PERTURBATION MODEL:
)
ð
3
%
'
'
%
3
¿
)
¼
)
Ö
Â
,
)
)
#
Solution:
Ø
#
#
¿
o
#
o
#
¼
Ö
,
>
Ö
Can estimate the shape of by GPA (generalized Procrustes analysis): by minimizing
Ø
Ã
h
i
¼
Ã
where
h
h
Õ
%
i
%
3
¼
3
i
4
¼
"
Æ
Ç
Ø
)
)
#
3
)
with
a diagonal
matrix. Furthermore,
.
/
#
$
%
%
¼
3
¿
.
/
Least squares approach. Iterative algorithm needed
for
dimensions
)
Ã
%
%
¼
Ã
t
The minimized sum of squares is:
%
Æ
Ç
3
%
)
3
)
)
)
)
92
-20 0 20 40 60
••••••
-60
-20 0 20 40 60
•••
•••
• ••• •••••
-60
-20 0 20 40 60
•••
•
•••• •••
•••••••
••••• •••
-60
-20 0 20 40 60
(a)
••••
••••••
••••
-60
-20 0 20 40 60
(b)
•••••
••••• •••
•••
-60
•••••
-60
••••
•••••
•••••
-20 0 20 40 60
••••
•••••
(b)
-20 0 20 40 60
(a)
•••••
•
•••• ••••••
-60
•••••••••
-60
-60
-20 0 20 40 60
•••••••
-20 0 20 40 60
•••••
••••••
••••••
•••••
•••••• ••
-60
••••••
•••••
-20 0 20 40 60
• •••
••
••••••••••••
•
-60
-20 0 20 40 60
91
(c)
Male macaques
-60
-20 0 20 40 60
(c)
Female macaques
93
0.6
0.6
-0.2
+•+•
+• •+
-0.6
-0.6
•+
+
•
•
+• +
0.2
+•
+
•
+•
-0.2
0.2
•+
+• +•
-0.6
-0.2
0.2
0.6
-0.6
-0.2
0.2
0.6
(b)
0.2
0.6
(a)
+•
+•
+•
+•
•
•+ +
-0.6
-0.2
•+
-0.6
-0.2
0.2
0.6
(c)
Male ( ) Female (+)
PC1 (47%) for Males: +/- 9 s.d.
94
95
Hierarchy of shape spaces
Original Configuration
remove translation
Different approaches to inference:
Helmertized/Centred
remove scale
remove rotation
Pre-shape
Size-and-shape
remove rotation
1.
2.
3.
4.
5.
remove scale
remove reflection
Marginal/offset distributions
Conditional distributions
Directly specified in shape space
Distributions in a tangent space
Structural models in the tangent space
Shape
remove reflection
Reflection size-and-shape
Reflection shape
96
97
Preshape distributions (2D)
Shape distributions: offset normal approach
2D - complex notation:
[
>
j
3
½
%
j
3
j
1
1
1
j
-
]
(
j
,
3
j
½
j
where
j
,
-
-
3
complex Bingham (Kent, 1994)
3
Û
ô
½
ç
j
j
j
is Hermitian. NB:
shape analysis.
ç
#
j
À
so suitable for
ç
j
2
2
1
1
(b)
(a)
NB: MLE of modal shape is identical to the PROCRUSTES
(least squares) mean
Mean triangle with independent isotropic zero mean
normal perturbations with variance .
Ø
complex Watson (special case of c. Bingham)
)
Û
Ø
Ø
ô
½
ç
j
½
j
j
98
99
DIFFUSIONS AND DISTRIBUTIONS
Offset normal density (wrt uniform measure) (Mardia
and Dryden, 1989; Dryden and Mardia, 1991, 1992)
Diffusion of points in Euclidean shape (WS Kendall):
Û
Æ
Ø
t
t
Æ
Æ
Ø
#
#
'
#
3
3
3
p
'
3
'
'
3
o
æ
1
1
1
1
t
¹
¹
,
,
,
)
;
where
Ø
p
j
)
Ø
Ø
Ø
#
'
p
*
j
,
and
)
r
(
)
)
×
&
&
º
Ornstein-Uhlenbeck process for Euclidean points
independent size and shape diffusions [with random time change for shape:
size ]. Computer algebra package
developed through this
work.
º
Æ
&
'
*
#
$
#
2
#
9
is the Laguerre polynomial.
Æ
)
r
S
Parameters:
Size and shape, and shape diffusions in
: 2k-4 mean shape parameters
: concentration parameter.
Ø
ó
(Le).
Shape density at time : (from previous slide).
100
101
Controls:
0.6
Maximum likelihood based inference
0.2
0.4
•
•••••••••
•
••• •
•••••••• •••••• •
•
••
••••• ••
•••
••
•••••
••••••
•
••••••••
•
•
•••••• •
•
•
•
•
• •••
0.0
• ••
••••••••
••••
••••
•••••
••••••
-0.6
-0.4
-0.2
•••••
••••••
-0.6
-0.4
-0.2
0.0
0.2
0.4
0.6
0.6
Schizophrenia patients:
0.2
0.4
•••• •
••••••
••••••••
••• •
0.0
•••
• ••••••
•
• ••••
• ••••
•••••••••
•
••••••••
• •••
••••
-0.6
-0.4
-0.2
•••••••••••
•
••••••••••• •
•••
••• •
••••
•••••
••••••••••
••••••• •
-0.6
-0.4
-0.2
0.0
0.2
0.4
0.6
102
Schizophrenia study (Bookstein, 1996;
Dryden and Mardia, 1998)
landmarks in 2D:
Controls and
Schizophrenia patients
103
INFERENCE: Multivariate normal model in the tangent space (to pooled mean)
%
A
Ô
,
,
Ô
Hotelling’s
test
)
,
|
|
)
·
#
%
3
3
&
3
3
q
)
Isotropic offset normal model: independent individuals
Inference: maximum likelihood
all mutually independent and common covariance matrices
@
3
3
%
3
3
3
p
1
1
1
Ô
1
,
1
1
Ô
,
)
·
3
q
(
(
3
- sample means
- sample covariance matrices
1.0
O
CS
0.5
Mahalanobis distance squared:
0
S
C
·
·
'
'
q
3
q
(
(
(
(
B
¼
)
0.0
;
x
S
C
x
-0.5
where
C
S
SC
SC
SC
t
%
%
'
o
B
o
O
Ô
Ô
Ô
Ô
r
SC
S
C
)
SC
Under
-1.0
SC
)
equal mean shapes...
l
S
-1.0
-0.5
0.0
0.5
1.0
%
'
%
'
o
Ô
Ô
Ô
Ô
0
,
)
)
)
t
%
%
'
o
Ô
o
Ô
Ô
Ô
)
)
ï
LR test
.
Monte Carlo permutation test, p-value: 0.038.
ï
t
>
A
1
>
1
Õ
Õ
%
>
?
)
,
)
<
)
=
;
;
N
under
.[
l
= dimension of the shape space]
S
104
105
Pairwise plots:
Gorilla (female/male):
$
$
$
$
$
$
$
$
t
0.03 0.05 0.07
$
!
$
$
$
>
3
A
Ô
$
$
%
%
Ô
$
$
$
$
)
$
$
$
$
$
t
-2 -1 0 1 2
t
&
'
$
%
$
,
$
$
mm
m
mm
m
mm m
mm
m
m
mmmm
m
mm
mm m
mm
mm
ff
f
f ff fff fff ffffff
f f ffff f
m fm f
m ffm
mm f f
m
mf f
m mm f f f f
ffmmf fff
fm m
m
m
m
m
m
f f ff f f
m
m
fmm
mm
m
f ff
m
m mm
m
mm m
m
mm
m m
m
m
mm
mm
mmm
m
mmm
f f ff
ff f ff f
f f ff
f
f ff ff ffff f f
f
f
f
f ff
f ff
f
f m f f f fff m
f f f ff f
fm
mmm
m
mm
ff f
m
mm
m
m
f
mmmf
m m
mm
m m
mm
-3 -2 -1 0 1 2
m mm
m
m
mm m mmmmm
mm
m
mmm
m
mm
m m
m
m
m
m mm
mm
mm m mm
mmm
m
mm
mmmmm m
m
mm m
f f
f f ff
f ff
f f fff fffff ff
f
f
ff fffff f f
f
f
f
f f ff ff
f ffff ff
fff f
f
m m
ff
m
ff
m
f
f
mm m m f f
f mf m
f
m
m
f
f f
m
m
mf f
f fmm m
m
f ff f
f
mm
ffmff mm m
mf f
ff mm
fm
fm
m
m
m
m
mmm
f fffm
mfmfm
m
ff ff f ff
m
m
m
m
m
m
f
f fmm
f
m
ff f f mm
m
mmff f f
m
mm m
m
m
mmmm m
mmm
mm
mm
mmm
m
m
mm
mm mm
mm
m
m
m
m mmm
mm
m mm mm
m
m mm m
fm
fm
fm
fm
f
f
f f f
ff f ff f f
f ff ff ffff fff fff
ffff fff
ffff f f f
f
f f f f ff
f ff f
f
f
f ff
f f ff
f fff f
ff f f m
f f
f
f
f
f
m
f f ff f m m
f
ff ff f f ff
ffff m
fm
mm
m
mf mm
m
m
mffmff m mm
m m mm
f mfm
m
f f
f m
m mm
f mm
f f
m
mm
m
m mm
m
mm
mm
m mmm
mm m m mm m
f
f
f
f ff f
ff f f f f fff fff m m
f ff
f f fffffff f f
f fff f
m
f ff mf
f f fmf m m m
m m
fm
m
m
m
f f
f mm m m
fm
m
fm
f mm
m
m
m
mm
f m
m
m
mm
mf
m
m
mmmmm
m
m
m
mmm m mm
m m
f
f
mmm m m m
m m
m
m
m
mm
mm
ff f
m
m
m m
f f ff f
m
m
m
score 12 m mmm
fm
f f ff ff ff
fm
f f f f
ff
f
$
$
$
$
$
$
$
$
$
$
$
$
$
$
f
$
$
$
f
$
$
$
$
$
$
$
$
$
$
f
$
$
$
$
$
$
$
$
$
$
$
$
score 2
$
$
t
"
$
$
1
Ò
-3 -2 -1 0 1 2
%
v
#
>
1
Ò
>
>
>
1
,
)
$
$
$
$
$
$
$
$
$
$
$
N
$
$
$
$
$
$
$
'
$
$
$
$
The test statistic is
and
$
$
$
$
$
$
f
$
$
240260280300
s
4
2
0.03 0.05 0.07
-2 -1 0 1 2
m m mm m
mm
m
mm
m
m
mmmm
mm
mm
mm
m
mm m m
m
mmmm
m mm mm
mm
mm mm
mmmmm
m
m
m
m
m
mm
m
m
m
m
m
m
m
mmmmm
mm
m
m m
m
mmm m m m
mm
m m
f
fff fffffff f fff f f f fff ffffffff ff f
ff ff ffffff fff ff f ff
f
fff ffffff f
ff f ff f f f
ff ff ff fff
f
f
f
m
m m ff
mm
f m
f f
mm
f
mf f
m
f
ff
m
m
f
m m
ff
m mff
mm
f
m m mf
f
ff m m
f
dist
ff f m m m
f ff f m mm
mm f f mf
f
m
mm m f f f f f f f
m
mmm m
f ffff f fm
mm
m
ff fffff m m
m m m mmf m
f ff mm
ff
mm
mm
ff fffffff mm
m fmm
fm
m
mm f f
m
mm
m
f ffff f m
m
mm
f
m f mff
m m
mm
m m
m
mm
m m
m
m
mmm
mm
m
m
m
m
m
m
mm m
mm m
m mm
m
mm
m mm m
m
m
mmm
m
m
mmm
mm
m m
mm
mmmm
m
mm
mm
m
m
mm
m
f
fmm fm mf
f
score 9 mmmm m
mmf f
f
f ff
ff f f ff f f
f
f fffffffff
fff f
f
ff fff ff fff f fff f f
fff ff
ffff
fffff ff fffff f f
f ff f
f ff ff f
f
f f
f ff
ff f
ff f
f
ff
f f
f f f fff f m
ff f f f f
ff f fffff
m
m
ff
f
f
m
m
m
f ff
m
f mf ff f f f f f ff fff f ff ff m
ff f f f
score 11
mm
mm m m
mm
mmm
mmm m
mfm
m
m
f
f f f f mmmm
mm
fff f mmm
fmmf f m
m m
m m
ff
mm
m
f m
m mfmm
mm
mm mm
m
mmm
m
mm mm
m
mm
m
m
mmm
m
mm
m
mm
m
m
m m
f
f
f
f
f f
f
f
f
f m
f
m
f
f
m
ff
f ffm f f
ff f fff ff f f
fffff ffffffff
ff ff ff f f
f ff ff f fff f
f ff
f f f mf f f f f f f ff fff f m
mm
f
mm
mm m
mf fm
f m
f
m
mm
m
mm
m
m
f f fff mm
m
m
mf f
ffm f m f f f ff f m
m
m
mm
m
mfm
m
mm
mmmmm mfm
m
m
m m mm
mf mf f f
m
f
f
m
mm m
mm
mm
mm
mmm
mm
mm
m
m
mmm
m
mm
m
m
m
m
m
m mm m
m mm
mm m
m m
mm
m
m
m
m
f
f m
f
f
mmm
m m
mm
m mmm
m m
m
mmm
mm m mm m
mm m m
mm m
m
mm
m mm m m
mm
mmmm m m
m
mmm
m
m
ff m
mm fm
mm m fmf f
m
mmm
f ffff
ff
m
f fm
m
m
mm m fm
m
m
fm
f ff
f
m
mf f m
f fff f m
f f
m m mm
m
m
ff f f fm f f f f fffff ff fffm
m
mm
m
fm
fmmm
fff f f fffff mmmmm
fm
f f fff ffff f
mm
fm
f
f
m
m
m
m
f
f
f
f
fff
f f ff
f ff f
ff ff
ff
f f f
f
f
f
f
ff
f
f f
f
f
ff
f f
m
m f f ff f
m
m f ff f f
f
fff f
f
f
ff f f
fm
f f f f f ff
ff m
f mf f
m ff ffm
fffff f f fm
ff fffffffff
fm
mmm
m
mfm
f
m mm
mm
mmmm
fffm
m
m
m
f f f fffffff fm
m fmm
f ff m m
mm
m
fm
fmfm
mf f
f ff f ff
m
m
m
mm
m
mfm
f fff m
mm
m
m
m
mm
m
m
mm
mm mmmm
m
f m mf f
ff f m
f f
m
m
f
f
m
m
m
m
m
mm m m
mm
m mm
m
m
m
mm
m m
m
mmm
m
m
m m
mm
m
240260280300
-2 0 2 4
dimensions
t
-2 0
Ñ
-2 -1 0 1 2 3
m m m
mm
mmm
mmm
m
f
m mm
fmf fff
m
m mf m
m
m
f mm m
m
m
ff ffffff fff f
m
f
f
f f ff
f
ff
f
f
ff
m
fmf f f
f ff
f
fff
f fff ffffm
f f fff f
m
f
f m
m
m
fm
f
m
f
fm
f
m
f
mfm
m
m
f
m
f
m
m
ff ff ffm
m mm
ffm
mm
fm ff f
score 1
m
m
mm
m
m
m
m
m
ff
f
mm
m
f
f
m
m
m
m
m
m
m
mm
m
m
m
mm
mm
m
-2 -1 0 1 2 3
-3 -2 -1 0 1 2
$
$
$
$
$
$
$
-3 -2 -1 0 1 2
landmarks in
Size, shape distance, PC scores in direction of mean
difference
$
$
$
$
$
$
%
$
'
106
107
Goodall’s F test:
If
(
then
+
Comparing several groups: ANOVA
Õ
Õ
Æ
Ø
Ø
Ç
%
3
Õ
Õ
)
)
<
;
=
Balanced analysis of variance with independent random samples
from
groups, each of size .
Let
be the group full Procrustes means and is the
overall pooled full Procrustes mean shape. A suitable
test statistic is
)
<
Õ
<
Õ
Ã
Ã
Æ
<
)
Ø
Æ
)
=
Ç
*
Ø
Ç
3
#
%
3
#
o
#
*
$
%
#
*
$
%
)
)
<
=
3
%
Under
:
l
Ã
Õ
3
1
Ã
@
&
)
1
3
&
1
3
3
1
1
1
Ô
-
,
ï
ï
-
Õ
Õ
S
Ô
F
)
<
;
=
I
N
-
Ô
Ø
Ø
&
Schizophrenia data:
Ã
landmarks in
A
dimensions
t
Ã
,
Õ
.
Æ
Ø
Ø
Ç
3
#
#
*
$
%
3
%
)
'
Ô
Ô
Õ
.
Õ
,
Ô
Ô
Ô
-
1
,
Æ
Ø
Ç
Ã
Ã
)
,
'
&
&
*
Ô
$
%
#
*
$
#
3
&
%
)
,
t
t
t
'
Ã
Under
l
equal mean shapes:
S
!
1
Ñ
, and
!
>
>
ï
1
Ñ
í
ï
1
Õ
.
Õ
.
Õ
%
,
,
)
)
N
%
,
)
+
,
F
;
F
I
;
I
N
Permutation test: p-value = 0.04
and reject
for large values of the statistic.
l
S
Hotelling’s
)
test
p-value = 0.66
108
109
By analogy with analysis of variance we can write
Complex Watson inference:
Õ
"
"
Ø
#
Ø
3
u
&
3
o
¹
)
j
¹
)
#
$
%
&
$
%
Ã
Ã
Ã
Two independent random samples
from
and
from
. We wish to test between
Ø
Ã
Õ
3
%
3
j
/
1
1
5
1
3
j
Õ
u
%
3
3
1
1
u
5
3
1
"
"
Ø
#
/
3
u
&
3
o
)
#
$
¹
j
o
)
%
&
$
¹
Ã
/
Ø
/
Ø
/
where is the overall MLE of if the two groups are
pooled, and
is analogous to the between sum of
squares. Since,
Ø
%
3
Ã
l
æ
%
l
Ó
S
Ø
Ã
#
0
Ã
where
, (i.e.
represents the shape corresponding to the modal preshape . For large it follows that
Ø
Ø
Ø
t
>
y
1
{
Ø
æ
z
Õ
"
"
Ø
#
Ø
3
u
&
,
3
o
Õ
v
)
¹
j
)
¹
í
%
)
t
Õ
#
$
%
&
$
%
F
F
)
Ã
Ã
;
Ã
"
I
;
Ã
"
Ø
#
/
3
u
&
3
,
o
Õ
v
)
¹
j
)
¹
í
)
t
#
$
%
&
$
it follows that
%
F
F
)
;
I
I
Õ
and we also have
"
"
Ø
#
Ø
3
u
&
3
'
o
æ
¹
)
j
¹
)
Õ
#
$
%
&
$
%
Ã
Ã
Ã
"
Ã
"
Ø
#
/
3
u
3
&
,
o
Õ
v
¹
j
)
¹
)
í
)
t
Õ
#
$
%
&
$
%
F
F
)
)
;
Ã
I
;
I
Ã
"
"
Ø
3
#
/
'
u
3
&
,
v
¹
)
j
¹
)
í
1
)
t
#
$
%
&
$
%
)
;
Ã
Ã
110
111
Bayesian approach to inference
2
Õ
z
3
%
3
3
7
1
1
1
7
º
3
2
2
Õ
%
3
3
7
Therefore, under
we have
l
1
1
1
3
z
7
3
1
4
3
2
2
2
Õ
3
%
3
3
z
3
S
7
1
1
1
7
t
'
o
Ô
æ
Õ
Ø
/
e.g. Data
complex Watson( , known )
Prior
complex Bingham ( known)
Ø
#
3
u
&
3
o
#
$
%
&
*
$
%
*
)
#
¹
j
¹
)
)
j
Ø
Ã
Ã
Õ
v
v
í
F
)
F
)
)
;
;
I
;
I
N
and so we reject
for large values of
. Using
Taylor series expansions for large concentrations
l
S
)
%
%
%
Ø
/
3
3
Ø
Ø
3
o
Õ
æ
í
Ô
)
¹
;
Õ
z
;
%
3
3
z
%
3
3
;
j
Ã
1
1
1
j
(
j
1
1
1
j
Ã
Õ
º
and so for large the test statistic
is equivalent to
the two sample test statistic of Goodall (1991).
6
Û
7
5
"
Ø
Ø
Ø
½
½
Ø
½
#
o
8
9
#
)
(
j
j
:
#
$
%
Û
Ø
Ø
½
3
o
Conjugate prior
MAP: dominant eigenvector of
o
r
112
I
EDMA (Euclidean distance matrix analysis) [Lele, 91+,
Stoyan, 91]
: form distance matrix (
inter-landmark distances (ILDs))
matrix of pairs of
Estimate
&
3
u
&
2
: population form distance matrix
Ø
Ø
/
. Then
@
3
&
3
&
3
+
3
3
1
1
1
)
,
)
0
'
u
'
u
=
3
o
2
;
2
<
;
)
<
)
)
;
)
)
)
<
;
<
)
(4)
r
)
=
Ø
Ø
/
/
'
'
o
;
<
)
;
<
)
;
)
<
.
Moment estimator
The smoothed Procrustes mean of the T2 Small data:
(Top left)
, (top right)
, (bottom left)
, (bottom right)
.
³
v
/
=
.
0
0
³
>
'
>
>
)
)
)
1
1
;
<
;
<
;
<
,
³
³
>
>
1
>
,
,
Removes bias.
Estimate of mean reflection size-and-shape
0
?
?
=
3
3
;
<
;
<
)
Ã
113
114
EDMA-II (Lele and Cole, 1995)
EDMA-I test (Lele and Richtsmeier, 1991)
and
estimates of average form distance matrix
for each group
A
Ù
Form ratio distance matrix
0
#
Ã
*
3
&
#
&
#
(5)
*
&
1
r
Ã
Scale by group size measure
Test statistic:
/
0
#
Ø
/
&
#
#
0
3
@
Ø
/
&
3
3
@
&
#
&
(6)
r
Ã
Ã
N
Ã
Ã
= Largest entry in arithmetic difference of scaled
matrices
N
Use bootstrap procedures.
More powerful than EDMA-I
115
116
Rao and Suryawanshi (1996)
B
: form log-distance matrix
shape log-distance matrix is
B
B
B
½
'
(
3
¼
,
,
%
t
"
"
B
B
;
(
#
&
1
Average reflection shape
'
#
$
%
&
$
#
%
,
0
Û
B
Ø
½
Average form log-distance matrix is
1
Ã
Õ
Å
"
B
Ø
Æ
,
#
3
%
3
#
$
%
C
)
Ô
Ã
where
and
Æ
is the distance between landmarks
for the th object .
%
#
3
)
%
#
p
)
Average reflection size-and-shape
0
Û
B
Ø
1
Ã
117
For small variations estimates of mean shape or sizeand-shape are all very similar...(Kent, 1994)
SIZE-AND-SHAPE
Distance based (+):
Invariance under translation and rotation (not scale)
Landmarks not necessarily needed (eg. maximum
breadth)
Perturbation model:
Consistent estimation under general normal models
Ø
#
#
o
#
3
o
#
3
3
3
p
¼
Distance based (-):
Ö
,
Invariant under reflections
1
1
1
Ô
,
ALLOMETRY
The relationship of shape given size
Visualization not straightforward
A choice of metric for averaging needs to be made
118
119
Microfossils:
0.40
•
0.44
•
•
•
• •
•
• •
0.44
•
0.40
0.36
•
• •
• •
•
•
•
U
0.32
•
•
•
•
•
•
8.2
0.75
0.65
• ••
•
•
•
• •
•
•
•
V
•
•
Y
•
•
0.45
0.7
•
•
•
•
•
0.55
0.8
•
•
•
0.6
V
•
• ••
•
•
•
•
76
•
71
• 84
•
74
•
•
•
•
100
V
•
•
•
• 84
•
75
• •
•
•
•
87
•
88
•
84
•
65
• •
• •
••
•
•
•
92
•
•
•
••
••
• •
•
88
•
•
•
100
•
8.4
X
•
•
•
88
•
•
•
•
•
•
•
•
•
•
•
•
• •
•
• •
•
•
•
8.2
•
•
•••
8.8
• •
• •
8.6
•
slog
•
•
•
•
9.2
0.36
•
•
9.0
0.32
8.4
Bookstein’s (1996) Microfossils
8.6
8.8
9.0
D
9.2
0.45
0.55
0.65
0.75
•
71
•
67
Regression:
•
72
0.5
•
64
Å
h
•
65
1
%
i
1
¿
o
¿
C
C
•
60
)
0.4
t
0.3
0.4
0.5
)
Tthe fitted values (with standard errors) are
,
,
and
0.2
Å
3
%
o
0.6
1
%
>
>
>
%
'
>
t
>
>
>
¿
U
1
Ò
Ò
1
1
1
t
t
Ã
1
'
Ã
>
>
>
>
¿
1
Ò
1
A
1
1
,
)
)
Ã
Ã
i
i
8
versus
h
h
t
Å
o
Significant linear relationship between
8
,
r
and
i
.
C
120
121
T2 Small mouse vertebrae data
-0.02
•
•
••
•
s
•
•
••
•
•
•
•
•
•
•
•
•
•
•
•
••
•
••
•
•
•
0.05
••
• •
-0.10 -0.05
0.0
•
•
•
•
• •
•• •
PC1
•
•••
•
•
•
•
• •• • •
• • •
•
•
•
•
0.02
0.0
••
•
•
••
•
•
•
•
165 170 175 180 185
•
•
PC2
•
•
•
•
•
•
•
••
•
•
•
•
•
•
•
•
•
••
•
•
•
•
•
•
•
•
••• •
• •
•
•
Also see:
•
•
••••
•
Library of shape analysis routines.
•
•
•
•
•
http://www.cran-r-project.org
•
•
• •
• •••
•
•
•
•
•
•
•
• •
•
•
•
•
•
•
•
•
•
•
•
•
•
• •
• •
•
•
•
•
•
• •
•
• •
•
•
•
•• •
•
•
•
••
•
•
•
•
Shapes package in R:
•
•••
•
•
•
•
•
•
•
•
•
•
-0.02
•
•• •
•
•
•
•
•
•
•
••• •
•
•
•
••
•
•
•
•
•
•
•
• ••
•
•
•
•
•
•
•
• • •
•
•
••
•
•
•
•
••
• •
•
•• •
•
•
•
0.02
•
••
•
•
••
•
•
0.0
•
•
165 170 175 180 185
0.05
•
0.02
0.0
-0.04 -0.02 0.0
-0.10 -0.05
• •
-0.04 -0.02 0.0
•
•
PC3
•
•
http://www.maths.nott.ac.uk/ ild/shapes
0.02
NB: Approx. linear relationship between PC 1 and
centroid size.
122
123
DEFORMATIONS AND THIN-PLATE SPLINES
The thin-plate spline is the most natural interpolant in
two dimensions because it minimizes the amount of
bending in transforming between two configurations,
which can also be considered a roughness penalty.
The theory of which was developed by Duchon (1976)
and Meinguet (1979). Consider the
landmarks
, on the first figure mapped exactly
, on the second figure, i.e. there
into
are
interpolation constraints,
t
Session III:
,
@
&
3
3
3
1
1
1
,
u
3
3
#
3
p
1
1
1
,
t
Deformations
Shape in images
Temporal shape
Shape Regression
Discussion
@
(7)
t
u
&
&
;
3
;
E
s
3
3
3
3
1
,
and we write
for the two dimensional deformation. Let
&
%
E
1
3
1
,
&
3
E
@
&
E
3
3
¼
3
1
1
1
,
)
*
3
%
u
%
u
u
¼
¼
1
1
1
1
)
so that
and
1
1
)
are both
*
matrices.
t
A pair of thin-plate splines (PTPS) is given by the
bivariate function
%
3
¼
E
E
E
)
ô
(8)
ò
3
o
o
¼
125
124
where
ones. The matrix
#
where is
and
t
ò
'
%
3
3
1
1
'
1
3
¼
,
and
&
3
#
'
&
is the -vector of
,
F
,
J
I
Å
,
3
>
3
(9)
)
Í
C
>
3
GH
>
>
>
>
K
¼
>
,
1
The
parameters of the mapping are
and
. There are
interpolation constraints in Equation (7), and we introduce six
more constraints in order for the bending energy in
Equation (14) below to be defined:
t
"
t
ô
o
t
¼
is symmetric positive definite and so the inverse exists, provided the inverse of exists. Hence,
t
t
t
F
F
F
F
3
%
,
I
J
I
J
*
I
J
*
I
J
;
,
%
GH
GH
GH
GH
ô
3
>
>
>
>
K
K
¼
K
K
¼
;
,
>
¼
>
>
>
¼
%
>
3
(10)
>
¼
¼
1
say. Writing the partition of
as
;
%
%
%
,
%
The pair of thin-plate splines which satisfy the constraints of Equation (10) are called natural thin-plate
splines. Equations (7) and (10) can be re-written in
matrix form
)
3
%
L
;
)
%
)
)
M
%
where
is
, it follows that
F
F
%
*
I
%
F
J
I
J
*
I
J
ô
%
(12)
*
¼
%
,
¿
L
GH
GH
GH
ô
3
>
>
>
K
K
¼
K
¼
3
3
¿
(11)
)
)
¼
M
Ã
Ã
,
%
>
>
>
¼
¼
giving the parameter values for the mapping. If
;
3
exists, then we have
%
%
and so the rank of the bending energy matrix is
%
%
N
N
%
N
%
N
3
¼
¼
;
;
N
%
;
N
%
;
N
%
3
¼
¼
¼
;
;
N
%
)
;
N
It can be proved that the transformation of Equation
(8) minimizes the total bending energy of all possible
interpolating functions mapping from
to , where
the total bending energy is given by
;
%
)
(13)
%
'
3
¼
)
)
A
%
'
%
'
.
*
;
;
N
where
, using for example Rao (1973,p39).
3
,
P
and
Using Equations (12) and (13) we see that
are generalized least squares estimators, and
%
¿
Ã
¿
E
)
Ã
&
&
&
)
)
)
"
E
E
E
)
t
)
)
)
u
o
>
%
3
o
'
¿
¿
2
1
¼
)
)
1
u
&
$
%
Q
Q
R
u
S
T
2
)
T
2
T
)
)
=
Ã
Ã
Mardia et al. (1991) gave the expressions for the case
when is singular.
(15)
A simple proof is given by Kent and Mardia (1994a).
The minimized total bending energy is given by,
T
T
matrix
The
matrix where
O
%
P
.
/
æ
O
%
(14)
1
There are three constraints on the bending energy
matrix
>
3
>
¼
¼
O
æ
O
,
.
/
%
¼
E
%
æ
T
is called the bending energy
æ
T
*
*
¼
1
(16)
In calculating a deformation grid we do not want to
see any more bending locally than is necessary and
also do not want to see bending where there are no
data.
Early transformation grids modelling six stages through
life (from Medawar, 1944).
Early transformation grids of human profiles
126
127
TRANSFORMATION GRIDS
Following from the original ideas of D’Arcy Thompson
(1917) we can produce similar transformation grids,
using a pair of thin-plate splines for the deformation
from configuration matrices to .
*
A regular square grid is drawn over the first figure and
at each point where two lines on the grid meet the
corresponding position in the second figure is calculated using a pair of thin-plate splines transformation
, where
is the number
of junctions or crossing points on the grid. The junction points are joined with lines in the same order as
in the first figure, to give a deformed grid over the second figure. The pair of thin-plate splines can be used
to produce a transformation grid, say from a regular
square grid on the first figure to a deformed grid on
the second figure. The resulting interpolant produces
transformation grids that ‘bend’ as little as possible.
We can think of each square in the deformation as being deformed into a quadrilateral (with four shape parameters). The PTPS minimizes the local variation of
these small quadrilaterals with respect to their neighbours.
#
u
#
3
#
3
3
p
E
1
1
1
Ô
U
Ô
U
,
(a)
(b)
128
Consider describing the square to kite transformation which
was considered by Bookstein (1989) and Mardia and Goodall
(1993). Given
points in
dimensions the matrices and are given by
t
*
It is found that
F
F
>
J
I
>
>
>
>
J
I
>
>
3
J
J
¼
1
Ò
?
L
J
J
'
>
>
>
>
'
>
>
>
(17)
>
,
t
1
G
Ñ
A
1
Ñ
A
1
Ñ
A
1
Ñ
A
G
M
'
>
'
>
,
,
,
,
*
1
G
?
G
3
,
,
t
GH
>
GH
1
'
>
'
K
K
1
?
ô
>
,
3
,
+
t
>
>
)
1
,
?
,
We have here
and so the pair of thin-plate splines is given by
, where
F
%
J
I
3
E
E
E
¼
>
¾
J
)
J
(18)
G
J
>
3
%
¾
G
E
3
,
G
v
GH
>
¾
&
"
K
t
>
>
'
'
&
o
E
1
Ñ
A
1
>
¾
,
,
&
$
%
)
where
and
. In this case, the bending energy matrix is
t
"
!
t
>
¾
!
1
A
,
t
t
1
Ò
Ò
"
Note that Equation (18) is as expected, because there is no
change in the
direction. The affine part of the deformation is the identity transformation.
F
,
I
'
J
'
J
J
,
,
,
,
,
,
,
,
,
,
,
,
,
,
,
G
%
%
'
'
G
>
>
æ
,
O
1
Ñ
A
GH
1
'
'
,
K
'
'
129
2
2
0
1
•
-1
•
•
-2
-2
-1
•
•
•
0
1
•
•
0
1
2
-2
-1
0
1
2
1
• •
0
•
•
•
•
-2
-2
-1
0
•
•
-1
1
2
-1
2
-2
-2
-1
0
1
2
-2
-1
0
1
2
Transformation grids for the square (left column) to kite
(right column) (after Bookstein, 1989). In the second row
the same figures as in the first row have been rotated by
and the deformed grid does look different, even though the
transformation is the same.
?
m
on the first figure at a different orientation, then the deformed grid does appear to be different, even though the
transformation is the same. This effect is seen in the Figure
where both figures have been rotated clockwise by
in
the second row.
?
m
-0.6 -0.4 -0.2 0.0 0.2 0.4 0.6
8000
9000
A thin-plate spline transformation grid between the control mean shape estimate and the schizophrenia mean
shape estimate.
10000 11000 12000 13000
6000
6000
(left) We see a square grid drawn on the estimate of
mean shape for the Control group in the schizophrenia
study. Here there are
junctions
and there are
landmarks. (right) we see the
schizophrenia mean shape estimate and the grid of
new points obtained from the PTPS transformation.
It is quite clear that there is a shape change in the
centre of the brain, around landmarks 1, 9 and 13.
8000
7000
8000
9000 10000 11000 12000
•
•
•
•
•• • •• •• •
7000
8000
9000 10000 11000 12000
6000
6000
10000 11000 12000 13000
•
••
• • •• • •
••
9000
(b)
•
•
••
• • •• •• •
8000
(a)
• • •
••• •• ••
•
10000 11000 12000 13000
-0.6 -0.4 -0.2 0.0 0.2 0.4 0.6
9000
-0.6 -0.4 -0.2 0.0 0.2 0.4 0.6
9000
•
•• •
• •
• •
10000 11000 12000 13000
•
• •
•
9000
••• •
• •
• •
8000
•
• • •
•
10000 11000 12000 13000
•
8000
-0.6 -0.4 -0.2 0.0 0.2 0.4 0.6
We consider Thompson-like grids for this example (above).
A regular square grid is placed on the first figure and deformed into the curved grid on the kite figure. We see that
the top and bottom most points are moved downwards with
respect to the other two points. If the regular grid is drawn
7000
8000
9000 10000 11000 12000
6000
7000
8000
9000 10000 11000 12000
• • •
•
•
• • •• • • •
7000
8000
9000 10000 11000 12000
t
!
>
Ô
U
A
>
Ñ
Ò
A
,
130
A series of grids showing the shape changes in the
skull of some sooty mangabey monkeys
131
Here we have labelled the eigenvalues and eigenvectors in this order (with
as the smallest eigenvalue
corresponding to the first principal warp) to follow Bookstein’s (1996b) labelling of the order of the warps. The
principal warps do not depend on the second figure .
The principal warps will be used to construct an orthogonal basis for re-expressing the thin-plate spline
transformations. The principal warp deformations are
univariate functions of two dimensional , and so could
be displayed as surfaces above the plane or as contour maps. Alternatively one could plot the transformation grids from to
for each , for particular values of and . Note that
the principal warps are orthonormal.
PRINCIPAL AND PARTIAL WARPS
³
%
Bookstein (1989, 1991)’s principal and partial warps
are useful for decomposing the thin-plate spline transformations into a series of large scale and small scale
components.
*
Consider the pair of thin-plate splines transformation
to
, which interpolates the
from
points to (
) matrices. An eigen-decomposition
of the
bending energy matrix
of Equation (14)
has non-zero eigenvalues
with corresponding eigenvectors
. The
eigenvectors
are called the principal warp eigenvectors and the eigenvalues are called
the bending energies. The functions,
4
u
4
)
)
*
t
æ
³
%
y
y
1
3
1
3
&
3
&
¼
ô
%
)
;
3
)
)
%
ô
%
ô
P
1
ô
@
³
y
o
O
³
u
P
Ö
Ö
1
1
1
Ö
)
;
%
3
3
3
P
Ö
Ö
1
1
1
The partial warps are defined as the set of
bivariate functions
, where
Ö
)
;
@
&
é
'
A
3
3
3
1
1
'
1
A
,
*
³
*
³
ò
&
&
&
&
&
&
&
¼
é
@
¼
Ö
¼
Ö
Ö
1
ò
&
3
3
3
'
3
&
The th partial warp scores for
fined as
@
¼
Ö
1
1
1
A
,
are the principal warps, where
.
ò
'
%
3
1
3
1
1
'
(from
*
) are de
*
@
¼
ó
&
%
3
ó
&
&
¼
3
3
3
'
3
¼
Ö
1
1
1
A
,
)
0.6
••
••
0.0
•
-0.4
-0.2
0.0
-0.2
• •
•
• ••
0.2
•
0.2
•
-0.6
"
•
-0.6
-0.6
P
••
-0.4
0.0
-0.2
•
• • ••
••
-0.4
Since
0.4
0.6
0.4
0.4
•
0.2
and so there are two scores for each partial warp.
0.6
132
;
ò
&
3
¼
é
-0.6
-0.4
-0.2
0.0
0.2
0.4
0.6
-0.6
-0.4
-0.2
0.0
0.2
0.4
0.6
-0.6
-0.4
-0.2
0.0
V
0.2
0.4
0.6
0.6
0.4
•
•
••
•
••
0.0
•
••
0.2
0.4
0.2
•
•
•
••
•
-0.4
@
0.0
we see that the non-affine part of the pair of thin-plate
splines transformation can be decomposed into the
sum of the partial warps. The th partial warp corresponds largely to the movement of the landmarks
which are the most highly weighted in the th principal warp. The th partial warp scores indicate the
contribution of the th principal warp to the deformation from the source to the target , in each of the
Cartesian axes.
0.6
%
-0.2
$
-0.4
&
-0.2
-0.6
-0.6
@
@
-0.6
-0.4
-0.2
0.0
0.2
0.4
0.6
-0.6
-0.4
-0.2
0.0
0.2
0.4
0.6
@
*
The five principal warps for the the pooled mean shape
of the gorillas
133
0.2
0.4
0.6
-0.4
-0.2
ö
0.0
0.2
0.2
0.0
0.4
0.6
-0.6
-0.2
0.0
0.2
0.4
-0.2
0.0
0.2
0.4
0.6
-0.2
0.0
0.2
• •
•• • • • •
-0.4
-0.4
-0.6
-0.4
-0.6
-0.4
-0.4
0.4
0.4
• •
•
•• •
••
0.2
• •
•
•• •
••
-0.6
A thin-plate spline transformation grid between a female and a male gorilla skull midline.
-0.4
-0.6
-0.6
(b)
-0.6
0.6
0.6
0.0
• •
•• • • • •
-0.2
0.2
0.0
-0.2
-0.4
-0.6
-0.2
0.6
-0.4
0.0
(a)
• ••
• ••
••
-0.2
-0.6 -0.4 -0.2 0.0 0.2 0.4 0.6
-0.2
-0.6 -0.4 -0.2 0.0 0.2 0.4 0.6
0.4
0.6
0.4
0.6
0.4
-0.2
-0.4
-0.6
•
-0.6
0.6
• •
• •
••
0.4
•
•
••
0.2
•
0.0
•
•
••
-0.6 -0.4 -0.2 0.0 0.2 0.4 0.6
-0.6 -0.4 -0.2 0.0 0.2 0.4 0.6
0.0
0.2
• •
•• • • ••
0.6
-0.6
-0.4
-0.2
ö
0.0
0.2
0.4
0.6
-0.6
-0.4
-0.2
0.0
0.2
0.4
0.6
Affine and partial warps for Gorilla (Female to male
mean shapes)
134
135
RELATIVE WARPS
m
m
0.06
f
f f
m
f
f
0.02
f f
f
0.02
ff
m
f m
m
ff f m m
mm
f ff m mf mf m
f
f f
m
fm
m m
m
m
mm
m
f
mm
f
f
f
mm
m
m
0.0
0.0
f
f
-0.06 -0.04 -0.02
m
f
-0.06 -0.04 -0.02
0.02
f ff
0.0
-0.06 -0.04 -0.02
f
0.04
0.04
f
f
f
f
ff
f f
f ff ff
f
ff f
f
mm
f
m m m ff m f m
m m
m
m m
m fm m
m
mm
m
m
m
m mfm
m
f
m
0.04
0.06
0.06
Principal component analysis with non-Euclidean metrics
m
f
m
mm
m m mm m
mm
m
m mm m mff
f
mm
m mf m
f mm m m
m
f
f
f fm f f fm
f f ff f
f mff f
ff f
f
f
f
f
Define the pseudo-metric space
-vectors with pseudo-metric given by
0.0
0.02
0.04
0.06
-0.06 -0.04 -0.02
0.0
ó
m
0.02
0.04
Æ
0.06
-0.06 -0.04 -0.02
0.0
0.02
as the real
ð
3
ð
0.04
%
-0.06 -0.04 -0.02
Æ
è
3
%
'
%
'
3
0.06
¼
2
2
W
2
2
2
2
;
)
)
)
where
and
are -vectors, and
is a generalized inverse (or inverse if it exists) of the positive
semi-definite matrix .
%
ó
2
2
0.0
0.02
0.06
0.06
-0.06 -0.04 -0.02
0.0
0.02
0.0
0.02
m
f fm
ff
m
f ff fffff m
fm m
m
mm
f f f f ff ff m
f mm m
f m
m mm
f fmf ff m
fm
m
mm m
m
m
-0.06 -0.04 -0.02
0.0
0.04
0.04
0.04
0.06
-0.06 -0.04 -0.02
0.02
f
mm
mm
f m
m
m mf m
f
mf m
fm
f
m mm ff f m
m
ff f m
fm
fm m
ff
m
f
m
f f ff ff m
m
ff
f m ff
mf
-0.06 -0.04 -0.02
-0.06 -0.04 -0.02
0.0
0.02
0.04
0.06
;
m
)
0.04
0.06
m f f f
ff f
mff fm
mmm
f mff fffmf
m mm
ff
fm
fm
mm
m
fm
fm
f f fmf
m
mm
m
m ffm
mm
mm
f
f
-0.06 -0.04 -0.02
0.0
0.02
0.04
0.06
The Moore–Penrose inverse is a suitable choice of
generalized inverse. If is the population covariance
matrix of
and
, then
is the Mahalanobis distance. The norm of a vector in the metric
space is
Æ
ð
%
3
%
2
2
2
2
)
Affine scores and the partial warp scores for female
(f) and male (m) gorilla skulls.
)
2
%
Æ
ð
ð
3
>
¼
2
2
2
2
;
1
)
L
We could carry out statistical inference in the metric
space rather than in the usual Euclidean
+
136
137
Appendix). The first few PCs in the metric space (with
loadings given by the eigenvectors of
space (after Bookstein, 1995, 1996b; Kent, personal
communication; Mardia, 1977, 1995). A simple way
to proceed is to transform from
to
in Euclidean space. For example, consider
principal component analysis (PCA) of centred in the metric space. Transformvectors
ing to
the principal component (PC)
loadings are the eigenvectors of
Æ
ð
è
4
3
2
u
%
%
4
%
)
)
;
L
;
9
L
2
)
;
L
) can be useful for interpretation, emphasizing a different aspect of the sample variability than the usual
PCA in Euclidean space. If our analysis is carried out
in the pseudo-metric space, then we say the our analysis has been carried out with respect to .
ó
Ô
Õ
%
3
3
2
1
1
1
2
%
u
#
#
2
)
;
L
Õ
"
,
u
#
u
#
¼
1
J
#
$
If a random sample of shapes is available, then one
may wish to examine the structure of the within group
variability in the tangent space to shape space. We
have already seen PCA with respect to the Euclidean
metric, but an alternative is the method of relative warps.
Relative warps are PCs with respect to the bending
energy or inverse bending energy metrics in the shape
tangent space.
%
Ô
Denote the eigenvectors ( -vectors) of
as
(assuming
), with corresponding
eigenvalues
. The principal component scores for the th PC on the th individual are
@
ó
&
3
Ö
J
J
3
3
1
1
ó
ó
y
'
1
Ô
,
,
³
@
&
3
3
3
1
1
ó
1
,
J
@
p
%
s
#
&
u
#
#
&
3
3
&
¼
3
ó
p
¼
Ö
Ö
)
;
2
1
1
1
1
L
,
J
J
So, the (unnormalized) PC loadings on the original
which are the eigenvectors of
data are
, where
(using standard linear algebra, e.g. Mardia et al., 1979,
%
&
Ö
)
;
L
%
Õ
%
%
J
Consider a random sample of shapes represented
by Procrustes tangent coordinates
(each is
#
#
*
$
%
#
Õ
)
;
2
2
¼
)
L
;
9
Ô
L
9
Õ
3
q
1
a
-vector), where the pole is chosen to be an
average pre-shape such as from the full Procrustes
mean. The sample covariance matrix in the tangent
plane is denoted by
and the sample covariance
matrix of the centred tangent coordinates
is denoted by
.
In our examples we have used the covariance matrix
of the Procrustes fit coordinates. The bending energy
matrix is calculated for the average shape
and then
the tensor product is taken to give
,
which is a
matrix of rank
. We write
for a generalized inverse of
(e.g. the Moore–
Penrose generalized inverse).
3
%
q
1
1
Ø
t
t
with
the eigenvalues of
with corre. The eigenvecsponding eigenvectors
are called the relative warps. The
tors
relative warp scores are
³
'
)
3
3
#
Ö
1
1
1
Ö
)
;
3
%
3
#
ç
1
1
1
ç
)
;
t
)
3
3
+
t
#
q
æ
%
¼
1
;
#
l
#
1
)
O
3
1
2
³
3
%
X
0
3
@
p
1
1
1
¸
Ô
t
æ
æ
t
#
&
&
+
æ
t
)
æ
2
)
3
1
1
'
1
3
3
3
1
L
,
,
Important remark: The relative warps and the relative warp scores are useful tools for describing the
non-linear shape variation in a dataset. In particular
the effect of the th relative warp can be viewed by
plotting
O
X
'
æ
)
"
)
3
p
ç
;
O
3
#
¼
t
"
,
@
æ
;
)
)
0
We consider PCA in the tangent space with respect
to a power of the bending energy matrix, in particular
with respect to
.
Ø
%
Z
ô
3
&
&
)
)
¼
l
æ
ç
Y
L
L
)
for various values of , where
0
ô
æ
O
#
0
0
Let the non-zero eigenvalues of
be
with corresponding eigenvectors
and
æ
0
¸
æ
"
)
)
)
3
)
)
¼
;
æ
Ö
;
Ö
1
;
L
3
³
;
)
;
%
0
L
L
L
;
)
$
%
3
3
%
#
Y
1
1
1
Y
)
;
)
;
ç
1
1
1
ç
)
;
#
0
0
"
)
³
;
3
)
¼
æ
)
Ö
;
Ö
;
;
L
;
;
L
The procedure for PCA with respect to the bending
energy requires
and emphasizes large scale
1
o
$
)
%
;
,
1
1
Ô
1
variability. PCA with respect to the inverse bending energy requires
and emphasizes small
scale variability. If
, then we take
as the
identity matrix and the procedure is
exactly the same as PCA of the Procrustes tangent
coordinates. Bookstein (1996b) has called the
case PCA with respect to the Procrustes metric.
1
'
,
1
>
S
æ
+
)
t
t
>
f
m
••
•
(b)
1
0.6
-0.050.0 0.050.100.15
+
-0.15
++
-0.6 -0.4 -0.2
0.0
0.2
0.4
0.6
(b)
•
•
• •
-0.6 -0.4 -0.2 0.0 0.2 0.4 0.6
-0.2
0.4
m
f
m
f f f
m m
m
f
mm m
m
mm f mf f f fff f
ff f f f f
m mm m
mm m
fm f f ff f
mmm
f f
f
f
mm
m
-0.15
-0.4
++
m
m
m
+
-0.6
(a)
0.2
••
-0.6 -0.4 -0.2 0.0 0.2 0.4 0.6
+
+
-0.6 -0.4 -0.2 0.0 0.2 0.4 0.6
0.0
+
++
0.0
•
,
0.2
+
-0.6
-0.6 -0.4 -0.2
•
(a)
0.6
+
•
-0.6 -0.4 -0.2 0.0 0.2 0.4 0.6
Relative warps:
0.4
0.6
0.4
++
••
-0.02 0.0 0.020.040.06
-0.4
-0.2
0.0
0.2
+
•
• •
•
-0.050.0 0.050.100.15
-0.06
•
•
f
f
m
m fmffffff f f f f
mm
mm
mm
mm
fmf f ff mf
m
m
m
m m mfm f f f ff
m
f
m
mm mm
m
-0.06
-0.02 0.0 0.020.040.06
-0.6 -0.4 -0.2 0.0 0.2 0.4 0.6
1
-0.6 -0.4 -0.2 0.0 0.2 0.4 0.6
)
•
• •
•
•
••
•
••
••
-0.6 -0.4 -0.2 0.0 0.2 0.4 0.6
-0.6 -0.4 -0.2 0.0 0.2 0.4 0.6
(a)
(b)
Deformation grids for the two uniform/affine vectors
for the gorilla data.
Relative warps:
1
'
,
138
139
0.05
0.0
-0.05
f
m
f
ff
m
m
fffff ff f f f
f
mm
m
f f
f
f fm
m mmmm
mm ff
m
f
mmmm
m
m
f f f
m
m
m
m mf
-0.05
[
0.0
[
Prior distribution for configuration
0.05
•
•
•
• •
•
•
•
-0.6 -0.4 -0.2 0.0 0.2 0.4 0.6
Relative warps:
1
-0.6 -0.4 -0.2 0.0 0.2 0.4 0.6
-0.6 -0.4 -0.2 0.0 0.2 0.4 0.6
Geometrical object description =
SHAPE + REGISTRATION
•
••
•
where REGISTRATION =
LOCATION, ROTATION and SCALE
•
•• •
Use training data to estimate any parameters
-0.6 -0.4 -0.2 0.0 0.2 0.4 0.6
>
140
141
Deformable templates:
Grenander and colleagues
Point distribution models (PDM) Cootes, Taylor, et
al.
Bayesian approach
CASE STUDY:
Object recognition: face images
- Prior model for object shape and registration using
SHAPE ANALYSIS
[example from Mardia, McCulloch, Dryden and Johnson, 1997]
- Likelihood for features measuring goodness-of-fit (feature density)
Bayes Theorem
Posterior inference
142
143
LANDMARKS or FEATURES
Grey level image
3
+
u
2
Scale space features (e.g. Val Johnson, Duke; Stephen
Pizer et al, UNC Chapel Hill, USA)
Convolution of image with isotropic bivariate Gaussian
kernel at a succession of ‘scales’ ( )
3
3
u
3
u
2
)
2
3
)
o
o
u
J
9
J
9
2
T
T
)
)
3
u
T
2
T
Æ
Æ
<
=
'
%
3
u
'
=
,
%
F
+
2
]
]
;
I
t
=
=
<
=
\
z
Q
)
)
)
Use 2D FFT
‘Medialness’ : Laplacian of blurred scale space image
144
Feature density (likelihood)
Pilot study - Face Identification: Choose
landmarks on the medialness image at scales 8, 11, 13
!
ñ
a
a
ñ
b
b
×
/
Å
^
Å
Ú
.
/
_
×
3
×
×
×
<
F
@
(
I
=
#
$
`
%
º
Johnson et al. (1997) motivate this as mimicking a
human observer.
Features are treated as independent
High medialness at feature
high density
Treat non-feature grey levels as independent, uniformly distributed (like a human observer ignoring those
pixels).
145
Parameters
#
need to be specified
146
Registration parameters
Location
Ø
Original raw face data
3
)
9
9
9
Ø
3
Rotation
•
•
c
y
•
e
7
3
••
c
•
)
Isotropic scale
18
•
g
h
f
4
g
h
0
50
3
0
d
5
6
2
22
222
5 2222
6 6 55555 7 77
6 6 555
7
666 6 5 777 77
6
9 74
63
8
44
3
9989
8 89 44 4
333 33 988
9
4
9
8
33
989 44
8
2
•
100
y
w
1
11 11
1111
•
1
d
50
200
150
J
100
J
150
200
)
J
0
50
100
150
200
0
50
x
100
150
200
x
3
¿
)
Ë
Ë
Hyperparameters
from training data (10 faces)
3
3
3
J
9
3
c
3
c
3
estimated
3
J
9
Ë
Ë
147
Bookstein registered data
Least squares Procrustes approach
0.0
•
•
•
•
•
••• •
-1.5
•
-0.5
•
••
• ••
•• •
••• ••••••
•••
0.0
•
• •
••
• •
•
•
•
•
••
•
•
• •••
•
•
••••••••
••
•••••
••••
• ••
• • •
-0.2
0.0
••
• •• ••
•
•
•
• •
••
• •
•
•• •
••••
•
•
• ••
•• •
0.0
v
-1.0
•
•
••• ••
• •
•
•
•
-0.2
•
i
•••
•• • ••
•
•
-0.4
-0.5
0.2
•
•
• ••
••••• •
•
•••
•• •••
0.4
148
-0.4
0.5
0.2
0.4
u
149
150
First five PCs (explaining 54.4, 29.9, 6.0, 3.7, 2.7%
of variability in shape).
•
••
0.0
0.0
•
•
•
-0.4
0.0
•
0.0
0.4
•
0.4
0.4
0.4
•
•
•
•
0.0
•
•
•
•
•
0.4
•
-0.4
•
0.0
0.4
•
•
•
•
•
-0.4
0.4
0.4
0.4
•
•
•
-0.4
•
0.0
0.4
••
•
-0.4
-0.4
0.4
•
•
•
•
••
0.0 0.2 0.4
-0.4
0.0 0.2 0.4
•
•
•
•
•
•
•
-0.4
•
•
•
•
•
•
0.0
•
0.4
•
•
0.0
•
•
0.4
•
•
•
-0.4
•
0.0
•
•
•
••
0.0
-0.4
•
•
0.0
•
•
•
-0.4
•
•
0.0
•
•
0.4
•
-0.4
•
0.4
0.4
•
•
0.0
•
-0.4
•
•
•
0.0
•
-0.4
0.0
0.4
•
0.0
•
-0.4
-0.4
•
•
•
•
-0.4
•
•
-0.4
•
0.0
•
-0.4
0.4
0.0
•
•
•
•
-0.4
••
0.0 0.2 0.4
0.0 0.2 0.4
0.4
0.0
-0.4
0.4
•
0.0
•
•
•
•
-0.4
•
•
•
0.0
0.4
0.4
•
•
•
0.0
•
-0.4
•
•
•
• •
-0.4
•
•
•
-0.4
•
•
0.0
•
0.0
•
•
•
0.4
•
•
0.4
-0.4
•
•
•
•
0.0
•
0.4
0.0
•
•
•
•
•
0.0
-0.4
0.4
0.4
•
•
-0.4
•
•
-0.4
•
•
-0.4
0.4
0.4
0.0
-0.4
0.4
-0.4
•
•
0.0
•
0.4
0.0
-0.4
0.4
0.0
-0.4
0.4
0.0
-0.4
0.4
•
0.4
•
•
•
0.4
•
•
• •• •
0.0 0.2 0.4
•
0.4
0.0
-0.4
0.4
0.0
-0.4
0.4
•
••
-0.4
•
•
•
-0.4
•
•
0.0
•
0.4
•
•
•
•
0.0 0.2 0.4
•
•
0.4
•
•
0.0
0.0
•
•
•
-0.4
0.4
0.0
•
•
•
•
-0.4
•
•
•
•
0.4
-0.4
•
•• •
•
•
•
0.4
•
-0.4
•
0.4
0.4
0.0
0.4
•
0.0
•
0.4
•
•
•
0.0
•
•
••
0.0
•
•
•
0.0
•
•
•
•
-0.4
•
•
0.0
•
-0.4
0.0
•
•
•
•
0.4
•
•
0.4
•
-0.4
0.0
-0.4
•
•
-0.4
•
•
••
•
•
•
••
•
-0.4
0.4
•
•
-0.4
•
•
Vector plot from mean to 3 S.D.s for first three PCs
-0.4
0.0
•
0.4
•
-0.4
•
••
-0.4
•
•
•
-0.4
•
•
•
•
•
•
-0.4
•
•
0.0
•
0.0
•
•
•
•
-0.4
•
-0.4
•
••
0.0
0.4
0.0
•
•
•
-0.4
0.0
•
•
•
-0.4
0.4
0.0
•
0.4
•
•
0.4
•
•
-0.4
•
0.0
•
0.0
•
•
•
0.0
•
-0.4
0.4
0.0
•
•
•
•
0.4
•
•
-0.4
••
0.4
0.0
•
0.0
0.4
-0.4
•
•
-0.4
•
•
0.4
••
•
•
•
•
•
-0.4
0.0
•
0.4
-0.4
•
0.0
•
•
•
•
0.4
•
•
•
0.0
•
•
-0.4
-0.4
-0.4
-0.4
0.0
•
-0.4
0.0
-0.4
0.4
•
••
0.4
0.0
•
•
0.0
-0.4
0.4
-0.4
•
•
•
-0.4
0.0
•
••
0.4
•
•
•
•
-0.4
•
•
•
0.0
0.4
0.4
-0.4
0.0 0.2 0.4
-0.4
0.0 0.2 0.4
•
•
•
0.0
0.4
151
152
.... FACE PRIOR
Draw samples from posterior using MCMC
Assume registration and shape independent
Multivariate normal prior model (configuration density):
^
Å
Ú
.
/
Object recognition: maximize posterior to obtain most
likely configuration given the image
Ø
Ø
w
ô
z
z
3
3
3
ô
3
%
3
3
¿
1
1
1
è
J
9
m
b
b
m
m
a
a
m
j
j
j
Straightforward Metropolis-Hastings algorithm
k
j
}
p
n
k
×
s
×
=
a
b
=
=
=
*
r
¸
<
~
=
)
)
l
q
l
)
)
l
o
l
;
=
=
=
=
<
=
\
\
\
Proposal distribution: independent normal centred on
current observation, with varying variance (linearly decreasing over 5 iterations, then jumping back up)
\
(
o
Bayes theorem
^
Å
Ú
.
/
q
Posterior density:
/
Å
Update each parameter one at a time
z
@
º
^
Å
Ú
.
/
3
/
Å
^
Å
Ú
.
/
z
(
@
º
153
154
chainsx[i, ]
128 132 136
chainsx[i, ]
78 80 82 84
Translations, scale, rotation, PC1, PC2
0
500
t
1000
1500
u
2000
u
2500
1500
u
2000
u
2500
1:nsim
950
chainsp
1000 1050 1100 1150
Results: MCMC output for face 2 (in training set): Posterior, Prior, Likelihood
x
x
x
w
t
500
1000
900
0
1:nsim
v
0
t
500
1000
1500
u
2000
u
2500
chainsx[i, ]
-2
90 94 98
1:nsim
v
t
0
500
1000
u
1500
u
2000
2500
chainsx[i, ]
-0.04 0.0 0.04
-6
-8
chainspr
-4
1:nsim
t
500
1000
u
1500
-10
0
u
2000
2500
1:nsim
t
0
500
1000
u
1500
u
2000
2500
0.0
chainsx[i, ]
-0.8
1000 1050 1100 1150 1200
t
0
500
1000
u
1500
u
2000
2500
-0.5
-1.5
chainsx[i, ]
1:nsim
950
chainsli
1:nsim
t
500
1000
u
1500
900
0
u
2000
2500
1:nsim
t
0
500
1000
u
1500
u
2000
2500
1:nsim
155
MAP estimate overlaid on scale 8
t
0
500
1000
u
1500
u
2000
250
0.0 1.0 2.0
chainsx[i + 6, ]
PC3,...,PC8
2500
-2.5
200
-1.0
1:nsim
chainsx[i + 6, ]
156
t
0
500
1000
u
1500
u
2000
2500
150
1.5
0.0
-1.5
chainsx[i + 6, ]
1:nsim
t
0
500
1000
u
1500
u
2000
2500
S
1:nsim
S
100
1.0 2.0
t
0
500
1000
u
1500
u
2000
S
50
• S
-1 0 1 2
t
0
500
1000
u
1500
u
2000
S
•
•
2500
1:nsim
chainsx[i + 6, ]
•
S
-0.5
chainsx[i + 6, ]
•
y
•
••
S
S
•
S
2500
-1 0 1 2
chainsx[i + 6, ]
0
1:nsim
0
0
t
500
1000
1500
u
2000
u
50
100
150
200
250
2500
1:nsim
157
158
Shape distance to training set.... Procrustes distance
and Mahalanobis
¹
IMAGE REGISTRATION
Procrustes
7•
5•
3•
1•
6•
9•
8•
•
10
4•
2•
0.0
dist
0.05 0.10 0.15 0.20
z
2
4
6
8
10
image no.
|
1•
3•
7•
4•
5•
8•
6•
9•
3
dist
4
5
6
Mahalanobis
•
10
{
0
1
2
2•
2
4
6
8
10
image no.
159
160
IMAGE AVERAGING
Consider a random sample of images
con, from a poptaining landmark configuration
ulation mean image with a population mean configuration . We wish to estimate and up to arbitrary
Euclidean similarity transformations. The shape of
can be estimated by the full Procrustes mean of the
. Let
be the
landmark configurations
deformation obtained from the estimated mean shape
to the th configuration. The average image has
the grey level at pixel location given by
Õ
%
3
3
ç
1
1
1
ç
Õ
%
3
3
1
1
1
ç
Ø
Ø
ç
Ø
(a)
(b)
Õ
%
3
½
3
#
1
1
1
E
Ø
p
Ã
Õ
"
½
(
,
#
#
ç
ç
#
$
E
1
(19)
%
Ô
(c)
161
162
(a)
(a)
(b)
(c)
(d)
(b)
(e)
(c)
Images of five first thoracic (T1) mouse vertebrae.
163
164
SHAPE TEMPORAL MODELS
Stochastic modelling of size and shape of molecules
over time: HIGH DIMENSIONAL.
Practical aim: to estimate entropy. Use tangent
space modelling.
2
0
−3
PC score 1
0
1000
2000
3000
4000
3000
4000
3000
4000
3000
4000
2
0
−3
PC score 2
time
0
1000
2000
2
0
−3
PC score 3
time
An average T1 vertebra image obtained from five vertebrae images.
0
1000
2000
2
0
−2
PC score 4
time
0
1000
2000
time
165
166
REGRESSION
The minimal geodesic in shape space between the
shapes of
and
where
[Riemannian distance] is given by:
*
*
ò
>
{
3
¹
S
Temporal correlation models for the principal component (PC) scores of size and shape. [AR(2)]
Non-separable model - different temporal covariance
structure for each PC but constant eigenvectors over
time.
Improved entropy estimator based on MLE, interval
estimators.
Properties of estimators under general correlation
structures, including long-range dependence.
*
ò
ò
ò
,
ò
'
~
ò
3
>
y
é
ò
-
S
S
S
}
where
is symmetric (i.e.
Procrustes rotation of on ).
*
-
is the optimal
é
-
*
é
-
Temporal shape modelling directly in shape space.
Practical regression models: tangent space regression through origin fitting geodesics in shape space.
¶
167
SMOOTHING SPLINES
Smoothing spline fitting through ‘unrolling’ and ‘unwrapping’ the shape space
.
)
On the Procrustes tangent space at time , the shape
space is rolled without slipping or twisting along the
continuous piecewise geodesic curve in
. The piecewise linear path in the tangent space is the unrolled
path.
S
)
Spline fitting in
: unrolling the spline to the tangent
space at
is the corresponding cubic spline fitted to
the unwrapped data.
)
S
Le (2002, Bull.London Math.Soc.), Kume et al. (2003).
A point off the curve is unwrapped onto the tangent
plane.
Piecewise linear spline
in
.
piecewise geodesic curve
)
Σ2
k
β
(t)
α2
Y
α1
* (t)
(t 0)
Σ k2
*
α1
α2
β
Y*
168
ò
y
o
169
NONPARAMETRIC INFERENCE
The full Procrustes mean is a consistent estimator of ‘extrinsic mean shape’ (Patrangenaru and Bhattacharya, 2003)
Central limit theorem for and a limiting
distribution for a pivotal test statistic
confidence regions.
Bootstrap confidence interval for mean shape based
on a pivotal statistic - NEEDS CARE in a non-Euclidean
space.
Coverage accuracy of bootstrap confidence region
.
Ø
Ã
Ø
DISCUSSION
)
Ã
Ô
At all stages geometrical information always available
Statistical shape analysis of wide use in many disciplines.
)
;
Great scope for further application in image analysis, e.g. medical imaging.
Bootstrap sample hypothesis test (not necessary
to have equal covariance matrices in each group).
Need to simulate from the null hypothesis of equal
mean shapes, and so the individual samples are moved
along a geodesic to the pooled mean without changing the inter-sample shape distances.
Simulation studies indicate accurate observed significance levels and good power.
Non-landmark - curve - data
170
Selected References to papers:
DG Kendall (1984,Bull.Lond.Math.Soc), Bookstein (1986,Statistical Science), WS Kendall (1988,Adv.Appl.Probab.),
DG Kendall (1989,Statistical Science), Mardia and Dryden (1989, Adv.Appl. Probab; 1989, Biometrika), Dryden and Mardia (1991, Adv.Appl,Probab) Dryden and
Mardia (1992, Biometrika) Goodall and Mardia (1993,
Annals of Statistics), Le and DG Kendall (1993, Annals of Statistics), Kent (1994, JRSS B), Le (1994,
J.Appl.Probab.), Kent and Mardia (1997, JRSS B), Dryden, Faghihi and Taylor (1997, JRSS B), WS Kendall
(1998, Adv.Appl.Probab.), Mardia and Dryden (1999,
JRSS B), Kent and Mardia (2001, Biometrika), Le (2002,
Bull.London.Math.Society), Albert, Le and Small (2003,
Biometrika).
172
171