Biological Control 35 (2005) 330–337
www.elsevier.com/locate/ybcon
Risk analysis and management decisions for weed biological control
agents: Ecological theory and modeling results
Mark C. Andersen ¤, Megan Ewald, Jason Northcott
Department of Fishery and Wildlife Sciences, MSC 4901, New Mexico State University, Las Cruces, NM 88003-0003, USA
Received 7 June 2004; accepted 6 May 2005
Available online 23 June 2005
Abstract
Biologically based control methods oVer many advantages for the control of invasive plant species; however, these methods are
not without risks to native species. Thus, there is a need for more eVective and eYcient methods of risk analysis for biological control
agents. We show how the process of ecological risk assessment established by the United States’ Environmental Protection Agency
may be adapted to improve assessment of the risks of proposed biological control agents. We discuss the risks posed by weed biological control agents, and present a simple individual-based model of herbivorous insect movement and oviposition on two species of
host plant, a target invasive plant species and a non-target native species, in simulated landscapes. The model shows that risks of
non-target impacts may be inXuenced by the details of the movement behavior of biological control agents in heterogeneous landscapes. The speciWc details of insect movement that appear to be relevant are readily measured in Weld trials and the general modeling
approach is readily adapted to real landscapes. Current biological control risk assessments typically emphasize eVects analysis at the
expense of exposure analysis; the modeling approach presented here provides a simple and feasible way to incorporate exposure
analyses. We conclude that models such as ours should be given serious consideration as part of a comprehensive strategy of risk
assessment for proposed weed biological control agents.
2005 Elsevier Inc. All rights reserved.
Keywords: Biological control; Invasive species; Herbivorous insect movement; Risk assessment; Individual-based model; Random walk; Neutral
landscape model
1. Introduction
Although estimates vary, there is broad agreement
that invasive species impose major costs on national
economies worldwide. The United States Department of
Agriculture (USDA) budget for invasive species
activities rose from $561 million in FY 2001 to over $1
billion in FY 2004 (USDA, 2000, 2005); USDA emergency pest expenditures increased dramatically for the
period 1981–2003 (USDA, 2003). In addition to direct
economic damages, invasive species can disrupt the provision of non-market environmental goods and services
*
Corresponding author. Fax: +1 505 646 1281.
E-mail address: manderse@nmsu.edu (M.C. Andersen).
1049-9644/$ - see front matter 2005 Elsevier Inc. All rights reserved.
doi:10.1016/j.biocontrol.2005.05.003
(e.g., by adversely impacting water quality) or present
risks to public health (e.g., West Nile Virus) (NAS, 2002).
The United States’ Bureau of Land Management estimates that invasive weeds expand their range by 4600
acres each day on western public lands (BLM Wyoming,
2005).
In spite of concerns over its eVectiveness, over the
irreversibility of biocontrol releases, and over potential
unintended eVects on desirable non-target plants
(reviewed by Louda et al., 2003; see also SimberloV and
Stiling, 1996), biological control remains a highly costeVective means for controlling invasive weeds on
regional scales not amenable to chemical control methods (Hill and Greathead, 2000). With the increasing
threat of biological invasions due to continuing globalization of the economy (Williamson, 1996), the
M.C. Andersen et al. / Biological Control 35 (2005) 330–337
recognition of the threats posed by invasive species to
our nation’s biotic heritage (NAS, 2002; van Driesche
and van Driesche, 2000), and with the elevation of the
priority of invasive species in both the domestic and
international policy arenas, the demand for continued
eVective biological control measures are not likely to
diminish. However, given the concerns mentioned above,
there is a clear need for more eVective risk analysis methodologies for biological control agents (Lonsdale et al.,
2001; Louda et al., 2003; SimberloV and Stiling, 1996).
Worldwide, current regulatory approaches to the
release of weed biological control agents routinely
ignore entire categories of potential risks (Sheppard
et al., 2003). This assessment has consisted primarily of
host range analysis to determine whether the proposed
agent could feed or oviposit on non-target species (McEvoy, 1996; SchaVner, 2001; Sheppard et al., 2003). However, no-choice tests can misidentify the Weld host range
of an insect up to 85% of the time, with no consistent
directionality in the bias (Harris, 2003; SchaVner, 2001).
The United States’ Plant Protection Act of 2000 recognized both the potential negative consequences and beneWcial aspects of biological organisms to control plant
pests and noxious weeds. Consequently, the regulatory
criteria are expanding to consider both the risks and
beneWts of proposed environmental introductions of biological control agents for the management of invasive
plant pests and noxious weeds.
In this paper, we brieXy review established guidelines
for environmental risk assessments in general and indicate how the current practice of risk assessment for weed
biological agents departs from these standards. We cover
only insects introduced for the biological control of
invasive plants (i.e., weeds), and exclude biocontrol
agents for insect and other pests, as well as pathogenic
biocontrol agents (e.g., mycoherbicides). Next, we present results from a simple individual-based model which
shows the relationships among the established ecological
risk assessment framework, screening processes for biological control agents for invasive plants, and general
principles of ecological theory. We conclude with some
recommendations for the conduct of risk assessments for
biological control agents and a brief discussion of the
place of such risk assessments in a comprehensive analysis of risks, costs, and beneWts.
331
control agents, the control agents themselves are the
stressors, the receptors are non-target host plants, and
the eVects to be evaluated are adverse eVects on native
species.
Pollutant risk assessments are always directed at a
particular assessment endpoint, such as response of
growth or fecundity to toxicity. These endpoints are typically focused on eVects of chemical contaminants on
individuals. However, since the quantities of interest are
usually population-level eVects (i.e., changes in abundance), ecological models are often used to perform the
necessary extrapolation from the measurement endpoint
(e.g., a toxic or teratogenic eVect) to the assessment endpoint (the environmental characteristic or feature that is
to be protected from risk, such as the abundance of some
sensitive species) (Pastorok et al., 2002).
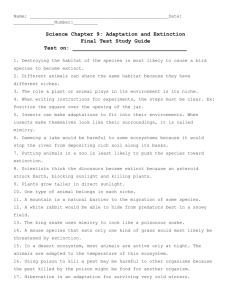
There are four phases recognized in the process of
ecological risk assessment, as follows (see also Fig. 1):
(1) Problem formulation: in this phase, one identiWes
the features of the system, the stressors and receptors present in the system, and the endpoints that
will be considered. In addition, one must carefully
formulate a conceptual model of the system
(Landis and Wiegers, 1997), and specify questions
and objectives.
(2) Exposure analysis: in this phase, the mechanisms of
contact between stressor(s) and receptor(s) are
characterized, and the magnitude and frequency of
contact are assessed. The result of this phase is a
quantitative estimate of the probability of some
harm being done. For most risk assessments, exposure analysis will include a GIS component or some
1.1. Ecological risk assessment
The process of ecological risk assessment was established by the United States Environmental Protection
Agency (1992) as a way to evaluate the chances of
adverse environmental eVects of exposure by environmental receptors to various stressors. Typically, the
stressors considered are various toxic chemicals, and the
adverse eVects are toxic eVects on the receptors, which
are individuals or populations. In the case of biological
Fig. 1. Schematic diagram of the steps in the process of ecological risk
assessment.
332
M.C. Andersen et al. / Biological Control 35 (2005) 330–337
other spatially explicit analysis (e.g., Moraes et al.,
2002; Obery and Landis, 2002; Walker et al., 2001).
(3) EVects analysis: in this phase, the eVects of stressors
on receptors are estimated, often based on toxicity
thresholds or exposure–response relationships. The
result of this phase is a quantitative estimate of the
severity of the harm that might be done. The eVects
analysis phase also includes the process of hazard
identiWcation and may conclude with hazard identiWcation for some types of discrete endpoints.
(4) Risk characterization: Wnally, the eVects and exposure analyses are integrated to obtain an estimate
of the probability of a negative eVect on the receptor. In addition, it is important to assess uncertainty, conWdence in the results, and the ecological
signiWcance of any risks identiWed.
Current approaches to risk assessment for weed biocontrol agents are not this comprehensive (McEvoy,
1996; Sheppard et al., 2003). For one example, even
though it has long been known that individual movement behavior can strongly inXuence the dynamics of
insect populations (Andersen and Kareiva, 1993; Kareiva, 1983; Kareiva and Odell, 1987), current practice
essentially Wnds the plants for the insects rather than
allowing the insects to move through the landscape and
Wnd the plants for themselves. Risk assessments for proposed control agents need to use more kinds of ecological, behavioral, life-cycle, and genetic information
(McEvoy, 1996; McEvoy and Coombs, 1999; SchaVner,
2001). These data must be integrated into populationlevel assessments of the risk of non-target eVects and risk
criteria should be used in the selection of agents (SimberloV and Stiling, 1996). Mathematical and simulation
models provide the best way to integrate information
from multiple studies on potential biological control
agents, and to provide a Wrm basis in ecological Wrst
principles for formulation of release programs. In addition, mathematical and simulation models are the only
way to extrapolate local phenomena to the regional
scale, which is essential for successful biological control.
The results presented below are intended to provide
some speciWc guidance for speciWc types of data that
need to be collected and how they could be integrated
into a comprehensive risk assessment.
We advocate the position that the process of risk
assessment for weed biological control agents should follow the basic outline of the process of ecological risk
assessment. Such a process would, as mentioned above,
consider the biocontrol agent to be the stressor and nontarget host plants to be the receptors. The measurement
endpoint might be some measure of damage to or oviposition on the non-target host. This would constitute a
substantial improvement over current practice, which
emphasizes eVects analysis at the expense of exposure
analysis (Sheppard et al., 2003).
2. Materials and methods
One way in which the shortcomings of current risk
assessment practice could be addressed is to use models
of insect movement in heterogeneous landscapes as the
basis for a exposure analysis. To illustrate this, we present analyses of a simple individual-based model of herbivorous insect behavior in the presence of two host
plant species. Although the model uses simulated landscapes and simplistic caricatures of insect movement, it
could easily be applied to real landscapes and adapted to
include more complex behaviors. Individual-based models, although computationally intensive, are relatively
easy to formulate, analyze, and interpret (Fahse et al.,
1998). In addition, although individual-based models are
typically parameter-rich, the parameters are typically
quite easy to estimate from behavioral observations
(Blanche et al., 1996; Turchin, 1998).
The model simulates movement by individual herbivorous insects through a fractal environment containing three habitat types (pest host plant, non-target
native host plant, and non-host matrix habitat), as well
as oviposition on those three habitat types. Results are
presented for simulations of insect movement as both
a simple random walk and a more realistic correlated
random walk (Othmer et al., 1988; Routledge, 1990;
Zollner and Lima, 1999). The correlated random walk
model has been applied extensively to the movements
of insects in the Weld (see references in Turchin,
1998).The fractal environments are simulated as neutral landscapes, speciWcally two-dimensional fractional Brownian motion processes. Neutral landscape
models are used in landscape ecology as a means of
generating artiWcial or simulated landscape patterns
with known properties, constraints, and structuring
processes (With, 1997; With and King, 1997). There
are a number of classes of neutral landscape models
that have been proposed and used by diVerent
researchers. The most useful of these classes of model
are amenable to spectral synthesis. Spectral synthesis
is the use of spectral basis functions such as wavelet
transforms or Fourier transforms to represent neutral
landscape models (Keitt, 2000). The spectral approach
also encompasses a number of diVerent types of scaling relations, although all variants of spectral synthesis rely fundamentally on a scaling relation between
amplitudes and frequencies of environmental (spatial
or temporal) Xuctuations. One of the most useful neutral landscape models is the fractional Brownian
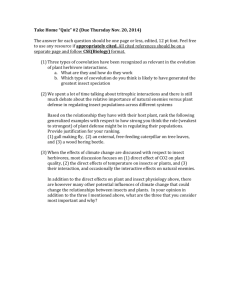
motion or fBm (Keitt, 2000). Fractional Brownian
motion is controlled by a parameter H called the
Hurst exponent; this parameter appears in the scaling
relation between the expected variance of increments
to the process and their separation distance, and governs the “grain” or patchiness of the simulated landscapes (Fig. 2).
M.C. Andersen et al. / Biological Control 35 (2005) 330–337
333
the corresponding habitat type; these two types of
oviposition events may diVer in their probability.
For each move, record the habitat type the insect
lands in, and whether or not it oviposits there. For
simulation runs in which insect movement was
modeled as a correlated random walk, one additional parameter speciWed the spread of the distribution of turning angles; this was a distribution
scaled to the interval ¡ to , with a mean turning
angle of zero.
Movement behavior parameters (move lengths and
turning angles), although critical components of our
model, are typically not considered in current practice.
These parameters are easily measured in the Weld
(Turchin, 1998). Our use of simulated landscapes allows
us to simulate multiple replicate realized landscapes with
known properties; in practice, one would use real landscape data from, for example, a set of relevant GIS layers.
Each simulation run includes 200 simulated habitats, each
with 2000 insects; each insect is allowed to make 100
moves. Default parameter values are shown in Table 1.
3. Results
Fig. 2. EVects of diVerent values of the Hurst exponent H on the spatial
properties of a fractional Brownian motion (fBm) process. Note that
smaller values of H lead to “Wne-grained” habitats with low patchiness
while higher values generate “coarse-grained” patchy habitats.
The basic algorithm for the model is as follows:
(1) Generate a fBm landscape with a given H value,
and scale it so that the value of each grid cell lies
between zero and one.
(2) Divide the fractal landscape into three habitat
types using two diVerent cutoV values. Values of
the fBm which are less than the Wrst cutoV value
are designated as the native non-target host plant,
values of the fBm which are between the two cutoV
values are labeled as non-host matrix habitat, and
values of the fBm which exceed both cutoV values
are designated as the target pest host plant.
(3) Release insects in the three-phase fractal habitat.
Insects are released at the point with the highest
value of the original two-dimensional fBm, to simulate release of biological control agents at a location with high pest density. Because the individual
insects are assumed to not interact [e.g., through
interference (Stillman et al., 1997)], the movements
of many individual insects through a habitat can
be simulated in a simple loop.
(4) Allow the simulated insects to move through the
habitat with diVerent average move lengths
(assumed lognormally distributed) in the three
habitat types. Allow insects to oviposit on the pest
host plant or on the non-target host plant when in
To investigate the eVects of the details of habitat
structure and movement behavior on the potential damage to a native plant caused by a biocontrol agent introduced to control a related pest plant, we studied
variation in three parameters for both simple and correlated random walk models of insect movement. EVects
of changes in the Hurst exponent (which control the
“grain” of the habitat) on number of ovipositions on the
native host plant are shown in Fig. 3. EVects of changes
in the mean move length of the insect on number of ovipositions on the native host plant are shown in Fig. 4.
EVects of changes in the probability that the insect will
oviposit on the native plant, given that it is on a native
plant, on number of ovipositions on the native host
plant are shown in Fig. 5.
The Hurst exponent of the fBm process generating
the habitat appears to have very little eVect on potential
non-target impacts by the biological control agent for
both simple and correlated random walk models of
insect movement (Fig. 3). The variability of potential
non-target impact across replicate habitats are quite
large. Note that we would not have replicate landscapes,
and thus not be able to observe this variability, if we
were applying the model to a real landscape. This indicates that the speciWc arrangement of habitat patches of
the two plant species in the landscape may be more
important in determining non-target impacts than the
“grain” of the environment.
Ovipositions on the native plant decrease with
increasing mean move length on the native, non-target
334
M.C. Andersen et al. / Biological Control 35 (2005) 330–337
Table 1
Default parameter values used in individual-based simulations
Parameter
Meaning
H
n
p_native
p_matrix
mu_pest
mu_native
mu_matrix
a_pest
Hurst exponent of fractional Brownian motion
Number of grid cells in x and y direction in fractal habitat
CutoV value to convert continuous fBm habitat to three-phase habitat
CutoV value to convert continuous fBm habitat to three-phase habitat
Mean insect move length in pest host plant habitat
Mean insect move length in native host plant habitat
Mean insect move length in non-host habitat
Beta parameter for distribution of insect turning angles in pest host plant habitat (correlated random walk
simulations only; this parameter is inversely related to the spread of the distribution)
Beta parameter for distribution of insect turning angles in native host plant habitat (correlated random
walk simulations only; this parameter is inversely related to the spread of the distribution)
Beta parameter for distribution of insect turning angles in pest non-host habitat (correlated random walk
simulations only; this parameter is inversely related to the spread of the distribution)
CoeYcient of variation of insect move length in pest host plant habitat
CoeYcient of variation of insect move length in native host plant habitat
CoeYcient of variation of insect move length in non-host habitat
Probability of oviposition on native host plant
Probability of oviposition on pest host plant
Number of fBm habitats to generate for each parameter combination
Number of insects per fBm habitat
Number of moves per insect
a_native
a_matrix
CV_pest
CV_native
CV_matrix
p_ov_native
p_ov_pest
num_hab
num_bug
num_move
Fig. 3. Results of individual-based simulation showing eVects of Hurst
exponent on number of ovipositions on the native plant; results for the
simple random walk model of insect movement are shown in the top
graph, while results for the correlated random walk model of insect
movement are shown in the bottom graph. In a risk analysis, this could
be considered a measure of exposure. Error bars represent one standard deviation, taken across the 200 replicate habitats.
plant species for both simple and correlated random
walk models of insect movement (Fig. 4). The low
variability shows that this result is robust across a range
of speciWc patch arrangements. This result makes intui-
Value
0.5
128
0.15
0.7
5
10
30
1
1.5
4
0.10
0.10
0.10
0.05
0.2
200
2000
100
Fig. 4. Results of individual-based simulation showing eVects of mean
insect move length in the native host plant habitat on number of ovipositions on the native plant; results for the simple random walk
model of insect movement are shown in the top graph, while results for
the correlated random walk model of insect movement are shown in
the bottom graph. In a risk analysis, this could be considered a measure of exposure. Error bars represent one standard deviation, taken
across the 200 replicate habitats.
tive sense; short move lengths on the native plant will
tend to keep the insect on or near its current habitat
patch, increasing the risk of non-target impacts.
M.C. Andersen et al. / Biological Control 35 (2005) 330–337
Fig. 5. Results of individual-based simulation showing eVects of oviposition probability on the native host plant on number of ovipositions
on the native plant; results for the simple random walk model of insect
movement are shown in the top graph, while results for the correlated
random walk model of insect movement are shown in the bottom
graph. In a risk analysis, this could be considered a measure of exposure. Error bars represent one standard deviation, taken across the 200
replicate habitats.
Number of ovipositions on the native plant increase
with increases in the probability of oviposition on the
native plant species (given that the insect is already in a
patch of the native plant) for both simple and correlated
random walk models of insect movement (Fig. 5).
Although intuitively reasonable, this result is not inevitable for all possible insect search and oviposition behaviors. This result also has low variability across replicate
realizations of the landscape.
Taken together, these results suggest that risks of
non-target impacts may be strongly inXuenced by the
details of the movement patterns of biological control
agents in target and non-target host plant habitats. The
speciWc details of insect movement that appear to be
relevant (move lengths, turn angles, and relative
magnitudes of probability of oviposition on target and
non-target plants) are readily measured in Weld trials.
4. Discussion
We have shown that simple individual-based models
of the movement of herbivorous insects in heterogeneous environments can provide a way to add exposure
335
analysis to the eVects analysis which currently forms the
bulk of risk assessments for biological control agents
introduced to manage invasive plants. Although the
models presented here rely on simulation of neutral
landscape models, the algorithms could easily be modiWed to simulate movement on known spatial habitat
conWgurations perhaps derived from remote sensing
data. The models could easily be made more realistic in
application to speciWc insect–host plant systems, and all
the models’ behavioral parameters can be estimated
based on simple Weld measurements of oviposition and
search behavior, and basic readily observed movement
behaviors (i.e., move length and turning angles). The
move lengths and turn angles in our model depend only
on local vegetation (i.e., target vs. non-target plant).
However, other factors inXuencing these parameters
could easily be incorporated into the models by making
the move lengths and turn angles depend on these other
factors as well.
Although the models allow for fairly sophisticated
simulation of individual movements, they do not at present allow for interactions between individual insects as
they move through their habitat. We are currently working on development of models that allow for this type of
behavior. However, the models as they now stand could
begin to provide useful guidance for risk assessments for
proposed weed biological control agents.
There are several areas of research that need additional development before a protocol for comprehensive
risk assessment for weed biological control agents can be
Wrmly recommended. Our results only address the exposure analysis phase of the process of risk assessment; this
neglected component of risk assessment for biocontrol
agents requires extensive additional research. Modeling
studies should focus on the importance of the movement
of biological control agents through the environment in
determining their potential non-target impacts. Individual-based approaches are likely to be advantageous in
terms of parameter estimation, interpretability, and predictive power; such models allow assessment of impacts
via simulation, and, although relatively parameter-rich,
have modest data requirements. Applications of such
models have the potential to allow more extensive and
explicit exposure analyses than have typically been conducted in the past.
Additional empirical behavioral studies of herbivorous insect movement are also needed, preferably
focused on proposed weed biological control agents. In
particular, risk assessment of proposed weed biological
control agents requires measurements of critical parameters that determine host search success in complex
environments, in natural systems as well as in agroecosystems. SpeciWcally, such studies should estimate the
move length and turning angle distributions that could
be used to parameterize a correlated random walk
model.
336
M.C. Andersen et al. / Biological Control 35 (2005) 330–337
Finally, we need peer-reviewed examples in the literature of regional comprehensive risk assessments (Landis
and Wiegers, 1997; Moraes et al., 2002; Obery and Landis, 2002; Walker et al., 2001) of control agent/pest plant/
native plant systems, as case studies from which to learn;
the Tamarix/Diorhabda/Frankenia system might be a
good place to start (Lewis et al., 2003). These comprehensive analyses would need to incorporate social and
economic factors, as well as full consideration of both
the beneWts and costs of biocontrol programs (Leung
et al., 2002; Nordblom et al., 2002; Olson and Roy,
2002). Given that biocontrol agents can disperse far
from the initial release area, questions of scale would
need to be thoroughly addressed in such studies. Individual-based models should be given serious consideration
for any exposure analysis that proves necessary. The
data required to estimate the movement parameters of
such a model are relatively easy to collect. These risk
assessments should be explicitly linked with cost-beneWt
analyses in a uniWed decision-theory framework
(Shea et al., 1998; SimberloV and Stiling, 1996).
Acknowledgments
This research was performed under Cooperative
Agreement No. 58-0111-2-002 between New Mexico
State University, and the United States Department of
Agriculture’s OYce of Risk Assessment and Cost-BeneWt Analysis. Comments from three anonymous
reviewers led to substantial improvements over an
earlier version of this document. Kumar Deepak Kallakuri assisted with the programming and simulations.
References
Andersen, M.C., Kareiva, P.M., 1993. Interactions between imported
predators and their prey in patchy environments. In: Kim, K.C.,
McPheron, B.A. (Eds.), Evolution of Insect Pests: Patterns of Variation. John Wiley and Sons Inc, New York, pp. 243–258.
Blanche, S., Casas, J., Bigler, F., Janssen-Van Bergeijk, K.E., 1996.
Trichogramma foraging behaviour: parameter estimation for single
females. J. Appl. Ecol. 33, 425–434.
Bureau of Land Management, Wyoming, 2005. Invasive plant facts.
Available from <http://www.wy.blm.gov/weeds/facts/htm>.
Fahse, L., Wissel, C., Grimm, V., 1998. Reconciling classical and individual-based approaches in theoretical population ecology: a protocol for extracting population parameters from individual-based
models. Am. Nat. 152, 838–852.
Harris, P., 2003. Host speciWcity in weed biocontrol. Online publication
of Agriculture and Agri-Food Canada, Lethbridge Research Centre. Available from <http://res2.agr.ca/lethbridge/weedbio/hostspec-spechote_e.htm>.
Hill, G., Greathead, D., 2000. Economic evaluation in classical biological control. In: Perrings, C., Williamson, M., Dalmazzone, S. (Eds.),
The Economics of Biological Invasions. Edward Elgar, Cheltenham, UK, pp. 208–223.
Kareiva, P., 1983. InXuence of vegetation texture on herbivore populations: resource concentration and herbivore movement. In: Denno,
R.F., McClure, M.S. (Eds.), Variable Plants and Herbivores in Natural and Managed Systems. Academic Press, New York, pp. 259–
290.
Kareiva, P., Odell, G., 1987. Swarms of predators exhibit “preytaxis” if
individual predators use area-restricted search. Am. Nat. 130, 233–
270.
Keitt, T.H., 2000. Spectral representation of neutral landscapes. Landscape Ecol. 15, 479–493.
Landis, W.G., Wiegers, J.A., 1997. Design considerations and a suggested approach for regional and comparative ecological risk
assessment. Hum. Ecol. Risk Assess. 3, 287–297.
Leung, B., Lodge, D.M., FinoV, D., Shogren, J.F., Lewis, M.A., Lamberti, G., 2002. An ounce of prevention or a pound of cure: bioeconomic risk analysis of invasive species. Proc. R. Soc. Lond. Ser. B—
Biol. Sci. 269, 2407–2413.
Lewis, P.A., DeLoach, C.J., Herr, J.C., Dudley, T.L., Carruthers, R.I.,
2003. Assessment of risk to native Frankenia shrubs from an Asian
leaf beetle, Diorhabda elongata deserticola (Coleoptera: Chrysomelidae), introduced for biological control of saltcedars (Tamarix
spp.) in the Western United States. Biol. Control 27, 148–166.
Lonsdale, W.M., Briese, D.T., Cullen, J.M., 2001. Risk analysis and
weed biological control. In: Wajnberg, E., Scott, J.K., Quimby, P.C.
(Eds.), Evaluating Indirect Ecological EVects of Biological Control.
CABI Publishing, New York, pp. 185–210.
Louda, S., Pemberton, R., Johnson, M., Follett, P., 2003. Nontarget
eVects—the Achilles’ Heel of biological control? Retrospective
analyses to reduce risk associated with biocontrol introductions.
Ann. Rev. Entomol. 48, 365–396.
McEvoy, P., 1996. Host speciWcity and biological pest control—how
well is research on host speciWcity addressing the potential risks of
biological control. BioScience 46, 401–405.
McEvoy, P., Coombs, E., 1999. Biological control of plant invaders:
regional patterns, Weld experiments, and structured population
models. Ecol. Appl. 9, 387–401.
Moraes, R., Landis, W.G., Molander, S., 2002. Regional risk assessment of a Brazilian rain forest reserve. Hum. Ecol. Risk Assess. 8,
1779–1803.
National Academy of Sciences, 2002. Predicting Invasions of Nonindigenous Plants and Plant Pests National Academy Press, Washington, DC.
Nordblom, T.L., Smyth, M.J., Swirepik, A., Sheppard, A.W., Briese,
D.T., 2002. Spatial economics of biological control: investing in
new releases of insects for earlier limitation of Paterson’s curse in
Australia. Agric. Econ. 27, 403–424.
Obery, A.M., Landis, W.G., 2002. A regional multiple stressor risk
assessment of the Codorus Creek Watershed applying the relative
risk model. Hum. Ecol. Risk Assess. 8, 405–428.
Olson, L.J., Roy, S., 2002. The economics of controlling a stochastic
biological invastion. Am. J. Agric. Econ. 84, 1311–1316.
Othmer, H.G., Dunbar, S.R., Alt, W., 1988. Models of dispersal in biological systems. J. Math. Biol. 26, 263–298.
Pastorok, R.A., Bartell, S.M., Ferson, S., Ginzburg, L.R. (Eds.), 2002.
Ecological Modeling in Risk Assessment: Chemical EVects on Populations, Ecosystems, and Landscapes. Lewis Publishers, Boca
Raton, FL.
Routledge, R.D., 1990. Spatial patterns arising from plant dispersal as
modelled by a correlated random walk. J. Appl. Prob. 27, 1–13.
SchaVner, U., 2001. Host range testing of insects for biological weed
control: how can it be better interpreted? BioScience 51, 951–
959.
Shea, K., Amarasekare, P., Kareiva, P., Mangel, M., Moore, J., Murdoch, W.W., Noonburg, E., Parma, A.M., Pascual, M.A., Possingham, H.P., Wilcox, C., Yu, D.W., 1998. Management of populations
in conservation, harvesting, and control. Trends Ecol. Evol. 13,
371–375.
M.C. Andersen et al. / Biological Control 35 (2005) 330–337
Sheppard, A.W., Hill, R., DeClerck-Floate, R.A., McClay, A., Olckers,
T., Quimby, P.C., Zimmermann, H.G., 2003. A global review of
risk-beneWt-cost analysis for the introduction of classical biological
control agents against weeds: a crisis in the making? BioControl
News Inform. 24, 91N–108N.
SimberloV, D., Stiling, P., 1996. Risks of species introduced for biological control. Biol. Conserv. 78, 185–192.
Stillman, R.A., Goss-Custard, J.D., Caldow, R.W.G., 1997. Modelling
interference from basic foraging behaviour. J. Anim. Ecol. 66, 692–
703.
Turchin, P., 1998. Quantitative Analysis of Movement: Measuring and
Modeling Population Redistribution in Animals and Plants. Sinauer Associates, Sunderland, MA.
United States Department of Agriculture, 2000. Glickman outlines
2001 budget proposal. Press Release. Available from <http://
www.usda.gov/pas/newsroom/releases/2000/02.0034.htm>.
United States Department of Agriculture, 2003. How is U.S.D.A.
responding to the invasive species challenge? Available from
<http://www.usda.gov/oce/forum/speeches/Diaz-Soltero.pdf>.
337
United States Department of Agriculture, 2005. Cost-sharing for animal and plant health emergency program. Fed. Regist. 68 (130):
40541–40553.
United States Environmental Protection Agency, 1992. Framework for
ecological risk assessment. United States Environmental Protection
Agency, Washington, DC.
van Driesche, J., van Driesche, R., 2000. Nature Out of Place: Biological Invasions in the Global Age. Island Press, Washington, DC.
Walker, R., Landis, W.G., Brown, P., 2001. Developing a regional ecological risk assessment: a case study of a Tasmanian agricultural
catchment. Hum. Ecol. Risk Assess. 7, 417–425.
Williamson, M.H., 1996. Biological Invasions. Chapman and Hall,
London.
With, K.A., 1997. The application of neutral landscape models in conservation biology. Conserv. Biol. 11, 1069–1080.
With, K.A., King, A.W., 1997. The use and misuse of neutral landscape
models in ecology. Oikos 79, 219–229.
Zollner, P.A., Lima, S.L., 1999. Search strategies for landscape-level
interpatch movements. Ecology 80, 1019–1030.