Sales Force Contracting Under Endogenous Risk∗
advertisement

Sales Force Contracting Under Endogenous Risk∗
David Godes†
November 2003
∗
I am grateful to George Baker, Bob Gibbons, Dina Mayzlin, Duncan Simester and Birger Wernerfelt
for many helpful comments on earlier versions of this paper. The paper has also benefited from comments
at the MIT Marketing Seminar and the Marketing Science Conference.
†
David Godes is an Assistant Professor of Business Administration at Harvard Business School, Morgan
165, Soldiers Field, Boston MA 02163 (dgodes@hbs.edu)
Sales Force Contracting Under Endogenous Risk
Abstract
Salespeople choose actions by trading off cost, return and risk. The literature does not consider
the impact of risk on action choice. This tradeoff has important implications for the firm. First,
the firm may provide no insurance in the salary. Since the agent’s action choice will determine
her risk, the salary cannot compensate her for it. Second, the firm may not be able to design
an incentive scheme to implement particularly risky actions. Finally, a multi-product firm may
not be able to design a scheme in which the agent splits her effort across two products that are
technological substitutes. One solution is a sales force structured by product. Complements may
be more costly to sell through a product structure. Thus, substitutes (complements) should be
sold through a product (territory) structure.
Keywords: Sales Force Management, Incentives, Compensation, Agency Theory
JEL Classifications: J33, M30, M50, M52, M54
Scene from “My Little Chickadee” in which a group of men are playing cards:
Cousin Zeb: (Walking by, surprised) Uh, is this a game of chance?
Cuthbert J. Twillie: Not the way I play it, no.
1
Introduction
Like the rest of us, salespeople care about — in fact, they dislike — risk. Rational salespeople make
decisions every day that trade off the cost, the expected return and the risk associated with various
actions. These decisions might relate to how hard they should work, which accounts to call on or
what the focus of a particular sales call should be. Cost, return and risk each factor — to different
degrees — into each of these decisions. Working harder — for example, putting in extra effort to
anticipate and formulate strategies against every possible objection — both increases the return
the salesperson might expect from a sales presentation and reduces the risk of a potentially fatal
objection. Calling on new prospects, on the other hand, may be a riskier proposition than calling
on one’s “list” of current customers: who knows what their needs are? will we be able to meet
them? Finally, focusing one’s efforts on a sales call towards building a long-term relationship in
lieu of pursuing current sales also may be viewed as risky in the sense that one’s key contact may
move elsewhere or the firm’s needs may change. It seems a safer prospect to meet the needs they
may have now and worry about tomorrow when it comes.
Thus, salespeople not only dislike risk but it is also quite common for them to take actions
to decrease it, to the extent such actions are available to them.
That is, their risk is often
“endogenous” as shown by these examples. Moreover, the risk-reducing actions may sometimes
be consistent with the firm’s desire to maximize long-term profits, as is probably true in the case
of a salesperson working harder to overcome all potential objections. On the other hand, this is
not always true. Calling on current, known customers and bypassing the riskier prospects reduces
risk but may not increase the expected return.
Most models of sales force contracting assume that salespeople will avoid effort if not properly
compensated. The same is not, however, true of risk. We argue that the relationship between
risk and return — in particular, the extent to which the actions that decrease the former increase
or decrease the latter — is of critical importance to the firm in its design of compensation schemes.
We present clear analytical evidence that explicit consideration of this phenomenon may lead to
very different normative implications for sales force contracting.
As well, we believe that our
results may in some cases match significantly better the sales force compensation schemes and job
designs we observe in practice.
The paper proceeds as follows. After a review of the related literature in Section 2, Section
3 presents a model in which the salesperson’s effort choice drives the binary outcome probability
1
of a single-product sales process. More effort means that she’ll sell the product successfully with
a higher probability. In Section 3.1, we make the standard assumption that the firm would like
the agent to put forth the highest possible effort level. Since we assume that the probability of
a sale is always greater than 12 , higher outcome probabilities also decrease her risk. Thus, this is
a case in which risk reduction and return maximization are in harmony. We show that, in this
case, the firm may provide no insurance in the salary component of the compensation scheme.
Since risk is endogenous, the salesperson may opt to implement an effort level that corresponds
to low (in fact, zero) risk. Thus, insurance cannot be provided in the salary, as is typically the
case. Moreover, this implies that the proportion of a salesperson’s compensation that is payable
in the form of incentive (as opposed to salary) may, thus, be higher the more risk-averse she is.
The intuition for this result is straightforward. The more risk-averse she is, the more insurance
she requires, in the sense that the firm needs to pay her enough to ensure that she reaches her
reservation utility. However, this insurance cannot come in the form of salary. We argue that this
result may partially explain some of the null results found on risk and risk aversion in empirical
analyses of sales force compensation. Finally, we show that, in some cases, the firm may actually
prefer to have a sales technology in which the agent might face more risk. The key to this result
is that this risk must be endogenous and its reduction requires the agent to take actions desirable
to the firm.
In Section 3.2, we look at a case in which the salesperson may have responsibilities besides just
selling. Thus, the firm wants to implement an “interior” effort level which is not too high and not
too low. To effect this, the firm may optimally dampen the incentive scheme in order to ensure
that the salesperson is willing to do her other work (paperwork, service, etc.). In this case, then,
the agent’s desire for risk reduction runs counter to the firm’s goals. In this model, we show that
the firm may not be able to design any incentive scheme to implement this interior effort level
when the salesperson is risk-averse enough. Alternatively, a salesperson with a given level of risk
aversion may not be willing to implement particularly risky alternatives.
Finally, in Section 4, we extend our analysis of this interior effort to a specific concrete problem:
sales force structure for a multi-product firm.
In particular, we investigate the firm’s desire to
provide enough sales effort on each product. We begin by looking at a sales force structured along
territory lines in which each salesperson is asked to split her effort across products. This requires
her to bear more risk on both products as compared with a case in which she puts all of her effort
behind one of the products. Similar to the single-product case, this model yields the insight that
the firm may not be able to achieve this effort split at all.
This problem is particularly acute
for products that are “substitutes” where effort placed on one product decreases the probability
that the other is sold. We then investigate a potential solution to this problem:
a sales force
structured along product lines. Besides guaranteeing that some effort will always be placed on
2
both products, the product structure may also do so at lower cost than the territory structure
when the products are substitutes. On the other hand, we show that complements may be more
costly to sell through a product structure than a territory structure. Thus, we argue, substitutes
should be ceteris paribus sold more often through a product structure while the opposite should
be true of complements. The paper concludes in Section 5 with a discussion and directions for
future research.
2
Related Literature
The idea that the risk faced by an agent is partially under her control has been in the background
since the earliest analyses of the principal-agent problem. In the economics literature, both Mirrlees
(1974) and Holmstrom (1979) present models with general distributions that are conditional on the
agent’s effort choice and therefore allow for the possibility that risk is endogenous. However, neither
specifically addresses this issue or its possible impact on their results. For example, Holmstrom’s
seminal paper (as well as most of the work that has built on it) focused on a comparison of
distributions for which higher effort implied first-order stochastic dominance.1 This approach,
in effect, focused on the mean-increasing impact of effort rather than the risk-increasing or decreasing impact of effort. Nor have the theoretical analyses of sales compensation schemes in
the marketing literature directly considered this phenomenon. As Holmstrom did, Basu et al.
(1985) and Lal and Staelin (1986) both consider cases in which the impact of effort on the noise
term results in first-order stochastic dominance while Rao (1990) considers a risk-neutral agent.
Similarly, the standard approach for applied analyses of sales force compensation is to utilize a
separable exogenous error term that is normally distributed. This specification, when combined
with an exponential utility function and a linear technology, offers an extremely convenient and
tractable certainty equivalent. Examples of this approach in the marketing literature include Lal
and Srinivasan (1993); Hauser et al. (1994). The exogeneity of the variance in this formulation,
along with the assumption of a linear contract (generally by invoking Holmstrom and Milgrom
(1987)) implies that the agent faces exogenous risk. In summary, then, much of the previous work
in this area has tended to assume away the possibility of endogenous risk and those papers that
didn’t do so nevertheless didn’t explicitly consider the impact that endogenous risk might have on
incentives and/or job design. One paper that does consider the link between an agent’s actions
and the risk she faces is the empirical study by Chevalier and Ellison (1997).
They show that
equity mutual fund managers adjust the riskiness of their portfolio in response to the incentives
inherent in the relationship between assets and returns. Besides providing interesting insights into
1
That is, they assume that effort level e implements an outcome distribution f (x|e) Moreover, for e0 > e, f (x|e0 )
dominates f (x|e0 ) in a first-order stochastic sense.
This is tantamount to a mean-shift of the identically-shaped
(and, therefore, equivalently risky) distribution.
3
the decision-making process of this important financial institution, this paper also demonstrates
the importance of considering explicitly the fact that risk may, in fact, be under the agent’s control
and that this may have important implications for effort selection and the payoffs of the game’s
other players.
3
A Simple Model of Endogenous Risk
The basis for our model is the standard problem in sales force motivation and compensation: a
salesperson for whom effort is costly and unobservable.
In order to induce the desired level of
effort, the firm must design a compensation scheme based on the only observable outcome: sales.
The only significant change we make to this general set-up is that we allow her effort to impact not
only the sales volume she produces but also the risk she faces. That is, unlike the standard model,
the risk faced by the salesperson here is partially endogenous. In order to investigate the impact
of endogenous risk on her decisions — and therefore on the firm’s compensation scheme — we first
need to specify risk as a function of her effort level. We choose the simplest possible specification
in which the salesperson puts forth effort that results in a binary outcome which we’ll refer to as
a “sale” or “no sale.” She chooses between three levels of effort e ∈ {0, 1, 2} which correspond to
three probabilities of a sale pe such that:
p0 = 0
1
p1 ≥
2
p2 > p1
(1)
(2)
(3)
So, if she puts forth no effort, she never makes a sale while higher effort increases the probability
of a sale.
Moreover, we assume that the selling technology is everywhere concave in effort,
implying that p1 ≥ 12 .2 The monetary equivalent of the disutility C (e) associated with effort is
linear:3 C (e) = c · e. The agent has exponential utility over monetary rewards x:
U (x) = 1 − Exp [−rx]
(4)
where r is the coefficient of absolute risk aversion (Pratt, 1965). Finally, she is assumed to have
outside options which will yield her expected utility U .
The firm’s profit function is denoted Π (e) to which we give more structure below. Given the
discrete outcome, the optimal contract is necessarily a linear one with “salary” α paid regardless
2
The assumption that p1 ≥
1
2
is sufficient to ensure concavity for all p2 and is therefore stronger than we need
for any specific p2 .
3
This is not an important assumption, it simply allows for ease of exposition.
utility, the salesperson’s utility is, of course, convex in the cost of effort.
4
Note also that, given concave
of the outcome and “commission” β paid only if there is an observed sale. Thus, the firm chooses
α and β to solve the following problem:
M axα,β Π (e) − βpe∗ − α
(5)
s.t.
E [U |e∗ ] ≥ U
∗
e ∈ arg max
e∈{0,1,2}
(6)
E [U |e]
(7)
The first constraint, (6), is the “individual rationality” constraint, ensuring that the salesperson
accepts the contract to work for the firm. The second constraint, (7), ensures that the salesperson’s effort selection is an optimal response to the offered contract. We investigate the optimal
compensation scheme under two different contexts. The first is a case in which the firm wants the
agent to work as hard as possible. The second, which we believe to be very common in practice
but less commonly studied, is one in which the firm wants to implement an intermediate outcome.
In the former, the firm’s goals and the agent’s desire for risk reduction are both satisfied by the
same effort choices. Thus, there is no conflict. However, we show that the endogeneity of the
risk has interesting implications for the optimal scheme. In the latter context, however, there is
a potential for conflict. As a result, in some cases, the firm may not be able to implement the
desired outcome.
3.1
Case i: Firm Prefers Highest Effort Levels
The traditional approach to the agency problem is to assume that the agent has a single task to
perform and that the firm prefers that she works as “hard” as possible (Holmstrom, 1979; Basu
et al., 1985; Rao, 1990; Lal and Srinivasan, 1993; Raju and Srinivasan, 1996). In our setting here,
then, we might assume that our salesperson has a single product to sell to a single customer and
that, further she has no additional responsibilities to draw on her time or effort. Moreover, we
assume that there is no downside to her putting all of her effort into selling to a customer. So,
for example, we assume that the customer doesn’t mind if the salesperson calls her constantly. In
Section 3.2, we investigate a context in which such maximal effort devoted to only selling activities
is not necessarily preferred .
In order to focus our attention on the optimal scheme given the
firm’s objectives, we assume that the firm’s profit function takes the following form:
Π (0) = Π (1) = 0
(8)
Π (2) = p2 (1 − β) − α
So, conditional on getting the desired level of work from the salesperson (i.e., e = 2), the firm’s
profit is equal to the sales less compensation costs. This is clearly a non-standard specification
5
of firm profits and bears discussion.
Our objective is to investigate the impact of endogenous
risk on the firm’s compensation schemes. In particular, we’re interested in how endogenous risk
impacts the firm’s ability to design a scheme to implement the outcome it desires (in expectation).
This is necessarily a function of what it is that the firm would like to implement.
We would
expect that the results would be a function of the match between the firm’s objectives, on one
hand, and the salesperson’s desire for risk reduction, on the other. Thus, to highlight the impact
of these objectives, we have chosen to impose these objectives exogenously. Clearly, the results
will be conditional on the actual firm objective. Finally, it is essential to note that this approach
is hardly without precedent.
Most notably, for very similar reasons, Holmstrom and Milgrom
(1991) exogenously impose a “benefit function” in which the firm earns zero profit unless the
agent allocates effort to both products. This is equivalent to the approach we take here.
Transforming (6) to solve for α explicitly as a function of the other parameters we get:
1
α ≥ U + C (e∗ ) + Ln [{pe∗ E + (1 − pe∗ )}]
r
(9)
where E ≡ Exp [−rβ]. Since (5) is strictly decreasing in α, Equation (9) will naturally hold with
equality and (6) will bind in equilibrium.
Thus, in the standard fashion, we can substitute (9) as
an equality into (5) to yield Π (2) = p2 (1 − β) − 2c − 1r Ln [p2 E + (1 − p2 )] − U . Differentiating
this with respect to β yields
∙
¸
E
∂Π (2)
= p2
−1 <0
∂β
p2 E + 1 − p2
(10)
Thus, the objective function is decreasing in β. Conditional on the high effort level being implemented, then, we can transform the problem into a simpler form:
M in β
s.t.
(11)
∙
¸
Exp [−2rc] − (1 − p2 )
1
β ≥ − Ln
r
p2
∙
¸
Exp [−rc] (1 − p1 ) − (1 − p2 )
1
β ≥ − Ln
r
p2 − p1 Exp [−rc]
(12)
(13)
Thus, the firm simply wants to minimize the commission it has to pay to the salesperson in order
to get her to put forth high effort. The following Lemma tells us which constraint will bind in
equilibrium and, thus, what drives β ∗ .
Lemma 1 In the program (11), for any p2 there exists a p1 (p2 , r, c) such that:
(a) For all
p1 < p1 (·), (12) binds in equilibrium. (b) For all p1 ≥ p1 (·), (13) binds in equilibrium.
All proofs are contained in the Appendix.
So, if p1 is high relative to p2 , the salesperson is
more likely to deviate to e = 1 than to e = 0. When p1 is low, the salesperson is more likely to
6
deviate to e = 0. The important thing to note is that e = 1 is the highest risk outcome for the
agent while e = 0 is the lowest. Thus, her decision to select e = 2 over the “next best alternative”
must account for not only the relative expected returns associated with these choices but also their
relative riskiness. The following surprising result reflects this.
Proposition 1 When p1 < p1 , α∗ = U
In this region of the parameter space, the agent receives no risk premium in her salary. That
is, she is not compensated for any of the risk she is forced to bear in equilibrium. Note that this
is true for arbitrarily high levels of risk aversion as long as IC0 binds. Note also that p1 →
p2
2
as
r → 0. Thus, when risk aversion becomes negligible, this result does not hold.
This result seems surprising and contradictory of the bulk of agency theory literature (Holm-
strom, 1979; Holmstrom and Milgrom, 1991) and sales compensation literature (Basu et al., 1985;
Lal and Srinivasan, 1993) which highlight the trade-off between insurance and incentives. There
is absolutely no insurance provided in this salary. The salary only compensates her for her outside
options. The intuition offered for the extant results is that the salesperson must be compensated
for the risk she will bear. Since, in these models, risk is exogenous, the salesperson and the firm
know ex ante what the agent’s level of risk will be and thus the salary can compensate her for
it. It is, of course, preferable that the firm compensate her for this risk in a deterministic fashion
since, by assumption, she is risk averse and the firm is risk neutral. However, this form of “salary
as insurance” is not possible when (a) risk is endogenous and (b) the agent is a credible threat to
select a “low risk” effort option. This is because the level (and, in fact, existence) of the risk that
the agent will bear is only determined in equilibrium. Therefore, incentive compatibility requires
that the insurance be provided in the form of (stochastic) bonuses and not (deterministic) salary.
The salary is useless as an insurance tool.
This highlights an inherent problem of contracting
under endogenous risk: to ensure that the agent is willing to accept the risk the firm wishes her to
accept, it needs to compensate her for this risk. However, this compensation must, by its nature,
be stochastic (i.e., she only gets the bonus if she makes the sale, which is probabilistic). The more
risk-averse she is, then, the higher this insurance must be.
This result might explain why, in some industries, we sometimes observe schemes in which
salespeople’s compensation package is comprised of an extremely high proportion of commission.
For example, in radio broadcasting it is typically the case that salespeople are paid 100% commission even though the standard theory would never predict this to be true. In absence of some
sorting mechanism in which agents with lower risk aversion self-select into these industries, it is
not entirely clear why some industries would be characterized by such high-powered incentives.
Proposition 1 suggests that it may be at least partially due to the fact that risk is endogenous.
Proposition 1 suggests, then, that we’ll observe lower salaries — and, therefore, proportionally
7
more commission — than the current theory might predict when the agent has effort options that
might yield her lower risk. Since this is driven by the agent’s risk aversion, it’s important, then,
to ask what impact risk aversion will have on the compensation scheme.
Below, we present
several results on the impact of risk and risk aversion on the optimal contract and firm profit.
The following result addresses this question and, again, shows that the simple consideration of
endogenous risk yields results that may be quite different from those based on strictly exogenous
risk.
Proposition 2 When p1 < p1 , β ∗ is increasing in r. When p1 > p1 , β ∗ decreasing in r. For all
values of p1 , β ∗ is decreasing in p2 .
We find that when p1 is high, we get the standard result that the firm’s optimal compensation
plan will be of lower power the higher is the agent’s risk aversion. However, when p1 is low then
the optimal commission is actually increasing in risk aversion. The key factor here is what the
salesperson’s credible threat is.
When p1 is high, she’s most likely to deviate to e = 1 so IC1
binds. In this case, the agent has shown a willingness to accept some risk. Moreover, since p1 is
high, that risk — relative to the risk she bears for e = 2 — is not too high. Finally, the “baseline”
risk — that associated with p1 — is reflected in the salary. However, when p1 is low, the opposite
is true. In this case, the salesperson is most likely to deviate to e = 0 which brings her no risk.4
Thus, the firm must pay her for the risk she is being asked to bear.
As shown in Proposition
1, this compensation cannot come in the form of a salary but must come in the bonus.
Thus,
her bonus must be higher and higher the more risk averse she is. This highlights the fact that β
has to play two roles when risk is endogenous. It must compensate the agent for her effort and
for the risk she will bear in the firm’s desired outcome.
The riskier the outcome — that is, the
lower p2 — the more risky the equilibrium outcome and therefore the higher β has to be in order
to compensate her for this risk.
Combining the results in Propositions 1 and 2 yields the following Corollary:
Corollary 1 For all parameter values, the proportion of the salesperson’s compensation that is
made up of salary is decreasing in the riskiness of the equilibrium outcome:
∂
α
∂p2 α+p2 ·β
>0
Put differently, the riskier the equilibrium outcome, the more of the agent’s expected compensation that will come in the form of commission. This is in direct contrast to the existing literature
4
While this is of course a stylized model, one can certainly see parallels to real-world decisions.
In this case,
we might think about the salesperson as not being willing to go out and get new business, which requires a great
deal of effort, and is instead comfortable working with the same clients she has known for years. In this case, the
firm needs to really increase the incentive power to get her to go out there and find new custoemrs. Moreover, the
extent to which her incentive must be increased is increasing in her risk aversion since it is this risk for which she’ll
be compensated.
8
(see for example the comparative statics results in Table 1 in Lal and Srinivasan (1993)).
The
intuition is analogous to above: as the desired (high effort) outcome becomes riskier (i.e., as p2
decreases), the firm needs to compensate her for this risk in the form of a higher risk premium.
However, as described above, at least part of this risk premium must be paid in the form of a
bonus, not salary.
Thus, the commission increases and salary decreases.
This is, of course, a
stylized model and, to the extent that exogenous risk is substantial one would expect a downward
force on commissions (compared with salary) as risk increases.
The fact that there exists this
offsetting interplay between exogenous as endogenous risk may in part explain the lack of clear
empirical support for the theoretical prescriptions.
For example, John and Weitz (1989) study
the relative proportion of salary and incentives in a transactions-cost approach. One of their independent variables — environmental uncertainty — is a useful proxy for “risk” in agency theoretic
terms.5
Yet, their model yields no significant results for this construct and thus no support for
the hypothesis. Similarly, Cravens et al. (1993) model two dependent variables — the percentage of
compensation paid in the form of salary and the extent to which the firm monitors salespeople — as
a function of several independent variables. While they do not model risk directly, they do model
risk aversion.
They find no support for the hypothesis that the salary percentage is positively
related to risk aversion.6
We argue that a more complete analysis of not only the level of risk
but the nature of the risk is necessary.
By incorporating the agent’s risk reduction strategies
explicitly — and, thereby, separating the impact of exogenous and endogenous risk — one may find
more empirical support for these hypotheses.
One aspect of this result that is somewhat unappealing is the fact that, as p2 decreases, the
marginal impact of effort also decreases, thus it isn’t necessarily surprising that β would increase
in this case.
However, the following result shows that a similar result holds for risk aversion r
when p1 is low though not when p1 is high.
Proposition 3 When p1 < p1 ,
∂
α
∂r α+p2 ·β
< 0. When p1 > p1 ,
∂
α
∂r α+p2 ·β
> 0.
So, when p1 < p1 , the more risk averse the agent is, the less of her expected compensation is
payable in the form of salary. Again, the intuition is perfectly straightforward. In equilibrium,
she is asked to bear more risk. The fact that she is more risk averse means that she needs to be
compensated for that risk, but that compensation must come in the form of bonuses. Thus, she
gets more incentive compensation.
It is not difficult to make the intuitive leap from the foregoing analysis to a perspective that the
firm might, in fact, prefer endogenous risk in some cases. Since the agent doesn’t like risk, she’ll
5
Indeed, the three items in the scale comprising this construct support this interpretation: (1) Industry volume:
stable vs unstable; (2) Sales forecasts: accurate vs inaccurate; (3) Unpredictable vs. predictable.
6
They do, however, find support at the p = .05 level for a positive relationship between risk aversion and
monitoring.
9
take actions to decrease it. Moreover, as we’ve shown, to the extent that these actions might be
counter to the firm’s desires (for example, choosing e = 0), the compensation scheme must reflect
this motivation.
The manager must consider not only the agent’s preference for low effort but
also her preference for low risk. To the extent that the firm’s desired outcome is aligned with the
agent’s preference for lower risk, the firm may benefit from this motivation. The final Proposition
of this Section addresses this.
Proposition 4 When p1 > p1 ,
∂Π∗
∂p1
< 0.
When p1 < p1 , firm profits aren’t a function of p1 .
p1 .
In this context, the firm prefers lower
Put differently, the firm actually prefers that the technology be “riskier” in the sense that
intermediate effort levels yield the agent strictly higher risk the lower is p1 . This runs counter to
the typical belief that risk is always bad for a compensation scheme. Proposition 4 says that, if
it could, the firm would make the agent face more risk when she chooses e = 1. The key here is
that such a case would be tantamount to adding endogenous risk which the agent can decrease
by choosing e = 2.7
In this sense, then, it appears that risk may actually be an incentive in
that its reduction is a second motivation for the agent to put forth high effort (in addition to
higher return).
This result is interesting because it is not what one obtains from a model of
neutrality.8
So, while we suggest no contradiction to the belief that random exogenous noise
risk
is bad for a compensation scheme, we believe that this result may offer an explanation for some
firms’ decisions to increase risk in an endogenous way.9
For example, many firms run contests
and lotteries based on sales results. A typical example might be one in which each salesperson
gets to place a certain number of balls in an urn for every sale she makes. Thus, depending on
the parameters of the contest, the higher her effort level, the more she may be able to decrease
the risk associated with the lottery.10
7
It is important to note that in this result, the ex post risk faced by the agent conditional on her equilibrium
choice is unchanged. However, the risk associated with the off-path action may be increased by the firm and this
may lead to higher firm profits.
8
c
IC1 in a model of risk neutrality is p1 β − p1 = p2 β − p2 − c so that β = 1 − p2 −p
. Also, α is set such that
1
l
k
∗
∂β
c
∂Π
∂α
α + βp2 − 2c = 0 or α = 2c − βp2 = 2c − 1 − p2 −p1 p2 . Thus, ∂p1 = ∂p1 + p2 ∂p1 , but since α = 2c − βp2
∗
∂β
−p2 ∂p
so ∂Π
= 0.
∂p1
1
Baron and Besanko (1987) derive a similar result in a very different model.
∂α
=
∂p1
9
among risk sharing, adverse selection and moral hazard.
They investigate the interaction
One of their findings is that, in certain regions of the
parameter space, the firm prefers that the risk averse agent (the supplier in their model) bears some risk even
though there is no uncertainty in either their cost or their output technology. The intuition behind their result is
that this risk sharing is required in order to deal with adverse selection; it reduces the “information costs” associated
with true cost revelation.
10
As in Godes (2003a), it is straightforward to show that this prescription — that the firm may prefer to add
(endogenous) risk in some cases — holds in a more-general model as well. In fact, it is shown in this model that the
10
3.2
Case ii: Intermediate Effort Levels
The results in Section 3.1 are driven by the fact that the agent wants to reduce her risk. Her choice
of high effort is attractive to her for two reasons: it reduces her risk and it increases her expected
compensation. Moreover, it’s attractive to the firm because her risk-reducing actions are consistent
with the firm’s goal of implementing high effort. While the assumption that the firm would like to
implement the highest possible effort level is a common one, it may not always be true in practice.
On one hand, the “highest effort” might represent too “hard” of a sell for some customers. It might
be the case, for example, that the firm would like the agent to attempt to inform and persuade
the customer regarding the merits of the product, but only up to a certain point. Selling beyond
this point might have negative repercussions for the firm and perhaps, though not always, for the
salesperson. More generally, in reality, the responsibilities of a salesperson are varied and multidimensional.
In addition to selling, most salespeople are responsible for prospecting, providing
after-sales service, delivering products, filling out paperwork, helping other salespeople, expediting
orders and interacting with other functional areas of the firm. In fact, these responsibilities may
comprise a significant portion of the sales job. In fact, according to a recent survey, salespeople
spend more than half of their time on non-selling activities. According to the salespeople, they
spent 26.4 hours a week on such tasks. According to their managers, the number was 23.5 hours.11
With respect to many of these responsibilities, the agent’s efforts are unobservable and/or nonverifiable. As discussed extensively by Holmstrom and Milgrom (1991), when this is the case, the
firm may need to temper the power of its incentive schemes in order to ensure that not “too much”
of the observable effort is put forth at the expense of the unobservable efforts. For example, we
might assume that selling effort is observed with less noise than servicing effort. Thus, there might
be too much selling effort produced and too little servicing effort produced since the salesperson
would rather put forth more effort on the less-noisily observed output12 . Some empirical support
for this implication can be found in Cravens et al. (1993). They find that lower-powered incentives
(in their model, a higher percentage of fixed salary) are associated with high levels of a specific
non-selling activity: providing information.13
Thus, we are interested here in a case in which the firm wants to implement high, but not
too high, levels of effort.
This context is of particular interest in the case of endogenous risk
to the extent that “moderate” effort may expose the agent to higher risk than would be true if
she worked as hard as possible.
While the (risk neutral) firm may prefer that she implement
firm may design a scheme containing endogenous risk that forces the agent to bear strictly higher ex post risk than
would be the case with purely exogenous risk.
11
Source: “Salespeople Spend Half of Their Time not Selling,” American Salesman, March 1, 1992.
12
One remedy that suggested in Holmstrom and Milgrom (1991) is to design jobs in such a way that observable
and unobservable tasks are not joined in the same agent.
13
The items in this scale include measures related to the accuracy, timeliness and completeness of paperwork.
11
a success probability of .5, the agent would rather work harder ceteris paribus and implement a
higher-probability (and therefore less risky) outcome.
We begin the analysis of interior effort
levels in this Subsection with a simple single-task model.
This allows us to develop the basic
intuition that it is expensive, difficult and, in some cases, impossible for the firm to implement
high-risk interior effort levels.
In the following Section, we further develop this idea in a more
concrete — but more complicated — context: multi-product sales forces.
Analogous to (8), we capture the firm’s preference for interior effort in the following profit
function:
Π (0) = Π (2) = 0
(14)
Π (1) = p1 (1 − β) − α
We again substitute (6) back into (5).
Moreover, we can transform the incentive compatibility
constraints to yield an equivalent problem as follows:
M inβ β
s.t.
(15)
∙
¸
Exp [−rc] − (1 − p1 )
1
β ≥ − Ln
r
p1
∙
¸
Exp [−rc] (1 − p1 ) − (1 − p2 )
1
β ≤ − Ln
r
p2 − p1 Exp [−rc]
(16)
(17)
In (15), the firm minimizes the commission rate necessary to ensure that the salesperson puts forth
an interior level of effort.
Equation (16) ensures that she prefers to put forth e = 1 to e = 0
while (17) ensures that she won’t choose e = 2. Since (10) holds with p1 in place of p2 , profit is
again decreasing in β. So, it must be true that IC00 always binds and, following the intuition from
Section 3.1, it is necessarily the case that α∗ = 0. However, as we know from Section 3.1, and
Lemma 1 specifically, the β associated with IC00 may or may not be lower than that associated
with IC10 . The following Proposition addresses this issue:
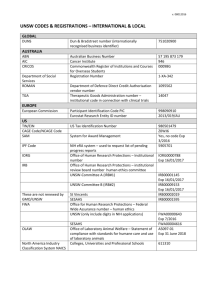
Proposition 5 When p1 > p1 , IC00 binds and defines β. When p1 < p1 , no contract exists to
implement e = 1. Further, p1 → 1 as r → ∞.
This is shown in Figure 1.
The intuition is analogous to that developed above.
When the
salesperson is asked to implement an outcome that is risky for her, and when options exist that
are less risky for her (i.e., when the risk is endogenous), the firm has a problem. It would like to
pay her high-powered incentives to bear this risk. However, the agent has two low-risk options
in the form of e = 0 and e = 2. As the power of the incentives grows, the latter becomes doubly
attractive in that it presents her with high return and low risk. When p1 gets low enough relative
12
β
IC1
In case i, the optimal
contract is the upper
enevlope of these two
constraints.
IC0
In case ii, the feasible region
is all bonuses above IC0 and
below IC1. So for high
enough p1, it exists. For low
p1, it does not.
p1
Figure 1: Implementabilty of Risky Effort Levels
to p2 , there exists no contract to implement e = 1.
agent becomes very risk averse.
This problem is particularly salient as the
This points out the fact that the “accuracy” of the incentive
scheme — the ability of the firm to implement whatever effort level it chooses — is lowered the more
risk averse the agent.
It is important to contrast this result with the traditional contracting model in which the
agent’s risk is exogenous. In that model, the firm can hypothetically implement any outcome it
desires, though it will become unprofitable to implement certain outcomes due to risk aversion.
Proposition 5 is different in that it says that regardless of the benefit associated with the desired
outcome — which can be arbitrarily large — the firm can simply not create a scheme to implement
it. It is not surprising that it would be costly for the firm to implement risky outcomes when the
agent is very risk averse. However, this result has nothing to do with the cost of implementation.
It is surprising in that it states that the feasible region of contracts vanishes.
This idea, which we extend below, is an essential one for the practice of sales force management.
There are some contexts in which precise management of the salesperson’s effort level is simply not
possible. This, of course, raises the question as to what the firm can do in this case. One option
is monitoring. The firm can increase the resources devoted to observation of sales effort in the
form of managers or other oversight mechanisms. Another possible solution would be to design
the sales task such that the selling responsibilities and non-selling responsibilities are assigned to
different people.
This is effectively the solution proposed by Holmstrom and Milgrom (1991).
This would allow the firm to increase the power of the incentives on the selling activities.
This result suggests that the firm may find it costly to implement outcomes in which the agent
13
is asked to work “not too hard.” As noted, this is of practical interest in the sense that the sales
task involves significant “non-selling” tasks.
general.
However, the applicability of this idea is far more
In the next Section, we extend it to the very common context in which the firm has
multiple products. To the extent that the firm assigns responsibility for more than one product to
a single salesperson, it is necessarily the case that it must craft a compensation scheme to ensure
that each product receives “enough” effort. That is, the salesperson must split her time across
products. Following the intuition developed here, we show in Section 4 that it may be very costly
for the firm to do so. Thus, it may find it more profitable to organize the sales force in such a
way that this is not a problem.
4
Sales Force Structure for Multi-Product Firms
According to Shapiro (1979), “At the very core of most organization decisions is the question
of how many sales forces the company should have and how they should be focused.”14
The
standard choices in this problem are a “product” structure in which each sales force sells a subset
of the firm’s products and a geographic, or “territory” structure in which each salesperson sells
all of the firm’s products to an assigned subset of customers.
set of variations and hybrids in between.
sales forces in a product approach.
There are, of course, an infinite
On one hand, it is clearly less costly to combine
For example, the fixed cost associated with a sales call —
travel, research, relationship-building — must be borne by each sales force. As well, general sales
training must be borne for each salesperson.
selling activities into fewer sales forces.
As a result, many firms opt to consolidate their
For example, after acquiring Amana in 2001, Maytag
integrated the two brands’ sales forces into a single sales force in order to “maximize synergies.”15
However, this decision is not an easy one.
On one hand, some products may require unique
skills that are non-transferable across products (Churchill et al., 1985).
As well, there may be
a risk of organizational strain when heterogeneous groups are combined into one (Walton, 1985).
Thus, it’s not surprising that we see many firms making the opposite decision.
As reported in
Rangaswamy et al. (1990), the pharmaceutical manufacturer Glaxo established a separate sales
force to sell its products other than Zantac.
These authors also report that Pitney Bowes, the
dominant manufacturer of postage meters, established a separate sales force to focus on copiers,
allowing the rest of the salespeople to focus on the sale of meters. Similarly, in 2002, Oracle, best
known for its database software, established a separate sales force for its applications business,
which had been performing “dismally.” Two aspects of these anecdotes are interesting. First,
they each seem to be motivated by the desire to implement more effort on some subset of products.
14
15
This quote is reported in Rangaswamy et al. (1990)
Source: Joe Jancsurak, “Maytag revs up innovation, execution engines,” Appliance Manufacturer, August 1,
2002.
14
So, for example, the managers at Glaxo felt that the other products “were not getting sufficient
exposure.” Their expressed goal was to “redirect sales effort away from the block-buster product
Zantac.” Moreover, according to Oracle CEO Larry Ellison, his salespeople were not as focused as
they should have been.16 Second, it is fascinating to note that these firms chose an organizational
response to this problem — establishing a new sales force structure — rather than an incentive-based
one. Presumably, the former is more costly and thus we might infer that these managers felt that
incentives alone may not always be enough to effect the desired allocation of effort across products.
In keeping with the theme of this paper, we explain this phenomenon by analyzing the role of
endogenous risk and risk aversion in the salesperson’s effort choice. We show below that, when
salespeople are sufficiently risk averse, the firm may not be able to design an incentive scheme to
get them to allocate effort across products. From Section 3.2, it is clear both (a) why this may
hold and (b) why such a result could never hold in a model of exogenous risk. To the latter point,
exogenous risk is, by definition, determined ex ante so risk plays no role in the effort decision and
thus all effort levels are necessarily implementable. Previous research in multi-product contexts
has focused largely on what the incentive scheme should look like. These models have typically
assumed either that risk is exogenous or non-existent (Srinivasan, 1981; Easton, 1976). However,
as shown in Section 3, neither of these are benign assumptions. Applying the insights — particularly
that it’s hard to implement risky outcomes — we show below that, at a minimum, the firm needs
to consider the role of risk and risk aversion. Moreover, in some extreme cases, we find that the
sales structure decision may be driven by the agent’s desire to decrease risk.
An important moderating factor that we consider in our analysis is the relationship between the
selling effort allocated to product A, on one hand, and product B, on the other. If a salesperson
attempts to sell A, does this help or hurt her ability to sell B? In this sense, our analysis revisits an
issue first addressed by Holmstrom and Milgrom (1991): optimal design of multi-task jobs. One
implication of their model is that firms should optimally assign responsibility for “complementary”
tasks to separate agents while tasks that are “substitutes” should be assigned to the same agent.
One might, then, attempt to apply this intuition to the sales context. Is it necessarily the case that
substitutes should be more commonly sold through consolidated sales forces while complements
should have their own dedicated sales forces?
Casual observation would suggest that, in fact,
the opposite case is at least equally likely. Multi-point car dealers are probably good examples
of substitutes: most consumers on a given shopping trip are only going to buy one. However,
they often have separate sales forces (indeed, separate showrooms) for new vs. used cars and
for cars made by different manufacturers.
On the other hand, one might make the argument
that insurance agents carry products that are at least mildly complementary: auto, home, life.
16
Source: Elise Ackerman, “Oracle’s Quarterly Profit Exceeds Forecasts.” San Jose Mercury News, December
19, 2002.
15
It is very common for most agents to offer at least one line in two or three of these categories.
There are at least two explanations for the fact that the results in Holmstrom and Milgrom (1991)
don’t seem to carry over to the sales context. First, one has to be careful with semantics. Their
definition of the inter-product relationship may not quite mesh with the manager’s interpretation
of it. They consider products to be complements (substitutes) if the noise terms in the linear sales
equations for the two products are positively (negatively) correlated.17 However, if the economy
heads into recession, we would expect that car sales overall would decline. Thus, in this sense, cars
might be stochastic complements though the owner of the dealership would likely think of them
as substitutes. We argue that a more useful approach to defining the inter-product relationship
is to take a technological perspective.
In this interpretation of complementarity, products are
complements (substitutes) when the demand for product A is higher (lower) when selling effort is
placed on product B. This approach has also been used by other researchers (Gilbert and Riordan,
1995; Bakos and Brynjolfsson, 1999) in analyzing multi-product contexts.
To analyze this problem, we begin with the same model as that presented in Section 3 extended
to include two products. To make the analysis straightforward, we continue with the assumption
that agent’s problem is one of allocating two “blocks” of time between two products i ∈ {a, b}
and, possibly, leisure. The outcome of the selling effort is again a discrete one: either her efforts
yield a sale of one of the products, both of the products or neither.
Thus, she chooses ea and
eb , the effort levels on products a and b respectively which yield sale probabilities for product i
denoted pei ,e−i where the first subscript captures the effort placed on product i and the second
captures the effort placed on product −i (the “other” product). The products are assumed to be
symmetric. To be precise, it is assumed that:
ei ∈ {0, 1, 2}
(18)
ea + eb ≤ 2
(19)
The monetary equivalent of the disutility experienced by the salesperson is again assumed to be
linear18 in the total amount of effort put forth:
C (ea , eb ) ≡ (ea + eb ) · c
(20)
where c is the per unit cost of effort. We assume c to be relatively small. As noted above, of
course, there may also be other “fixed” costs associated with servicing, and selling to, a customer.
These might include travel costs, costs of researching the client and its employees, or costs of
17
Specifically, if the sales equation for product i ∈ a, b is Xi = ei + εi then the products are complements if
COV (εa , εb ) > 0 and substitutes if COV (εa , εb ) < 0. This definition of complementarity in stochastic terms has
also been used by Sarvary and Parker (1997).
18
This is not a restrictive assumption but makes some of the conditions to follow more tractable. The substantive
insights from each of the results to follow go through in a model witn convex costs.
16
simply managing the relationship. The key is that these are borne for every salesperson-customer
pair. We do not model the impact of these costs directly since the core intuitive results do not
require them. However, it is clear that when these costs are non-trivial, then the firm will ceteris
paribus prefer a single sales force, a territory structure.
It is assumed that a product that receives no selling effort is never sold successfully and that
the probability of a sale is increasing in the effort put behind it:
p2· > p1· > p0· = 0
(21)
The response functions are assumed to be concave in effort. A sufficient condition for ensuring
this generally is that
1
∀i, j > 0
(22)
2
which is a sufficient condition for the concavity of the constrained
pij ≥
We further assume that p10 ≤
2
3
profit function. Effort placed on product a may impact the sale of product b and vice versa. The
(symmetric) relationship between the products is captured in the parameter p11 . Specifically, we
define products as either complements or substitutes according to the following:
“Complements” ⇐⇒ pei ,e0j > pei ,e00j
(23)
“Substitutes” ⇐⇒ pei ,e0j < pei ,e00j
(24)
0
where ej > e00j and ei > 0. So, complementary products are those for which effort placed on one
product increases the probability that the other is sold.
decreases the other’s sale probability.
Effort placed on a substitute product
We assume that there is no analogous inter-customer
relationship. Effort placed selling one customer has no impact on other customers.19
Besides choosing the contract parameters, the firm also decides on the structure of its sales
force. Specifically, it can structure the sales force along product lines or along territory lines. In
the former case, a salesperson is responsible for selling her product to each of two customers. In
the territory structure, each salesperson sells both products to a single customer. These choices are
shown in Figure 2. We now analyze these two choices in turn. In each case, we analyze a context
in which risk aversion is relatively low so a contract always exists to implement the outcome the
firm seeks. Then, we investigate extreme cases in which such a contract does not exist.
19
This is, of course, a somewhat unrealistic assumption. For example, start-ups typically scout for the important
“reference accounts” which will make future sales easier. Moreover, consumer products marketers typically like to
launch new products by focusing on the “opinion leaders” since they’ll create “buzz” about the product. To justify
this asumption, we argue that (a) the inter-product effects are likely to be more pronounced and (b) in steady state,
for more mature products, these inter-customer effects are likely to be negligible.
17
Territory
Structure
Product
Structure
Salesperson A
Customer
1
Salesperson A
Salesperson B
Customer
2
Salesperson B
Product a
Product b
Figure 2: Product Structure vs. Territory Structure
4.1
Territory Structure
Analogous to the single product case, given the discrete setting, the only possible contract in this
context is one which pays β a if only product a is sold, β b if only product b is sold and β ab if both
products a and b are sold.
In addition, the firm pays salary αregardless of the sales outcome.
The salesperson’s expected utility in the territory structure is thus:
E [U |ea , eb ] = 1 − exp [−r (α − C (·))] { pa (1 − pb ) Ea
+pb (1 − pa ) Eb + pa pb Eab
(25)
+ (1 − pa ) (1 − pb )}
where we abuse notation somewhat by referring to pa as the probability that she sells product a
dropping the explicit reference to ea and eb for notational clarity. Further, the E’s are defined
analogously to Section 3: Ei ≡ Exp [−rβ i ] and Eab ≡ Exp [−rβ ab ].
Following Holmstrom and Milgrom (1991), we model a context in which the firm wants effort
placed on both products. These authors defined a “benefit function” B (t1 , t2 ) where t1 and t2
are the efforts that the agent places on tasks 1 and 2, respectively. They assume that B(0, t2 ) = 0
∀t2 . This specification can be justified on several grounds. The firm might have a purely strategic
reason for wanting to sell multiple products. For example, Schmalensee (1978) suggests that the
firm may deter entrants by offering multiple products. Or, one product may be a newer product
that is expected to generate sales only after a certain period of time on the market. If we assume
that the firm’s horizon is longer than the salesperson’s, then the firm has a preference for sales effort
on both products that won’t translate into current sales. Similarly, the firm may want to “learn”
18
about the market or the product and requires sufficient sales effort to gather the necessary data.
Finally, it is clear from the concavity assumption20 in (22) that — before considering incentive costs
— the firm should always prefer her to split her effort; her marginal productivity for her second
block of time will always be higher on the second product than on the first.
The firm, then, solves the following problem:21
M axα,β a ,β b ,β ab 2pa (1 − pb ) (1 − β a ) + pb (1 − pa ) (1 − β b ) + pa pb (2 − β ab ) − α
(26)
s.t.
E [U |ea , eb ] ≥ 0
(IR)
e∗a = e∗b = 1
(SPLIT)
e∗a , e∗b ∈ arg max E [U |ea , eb ]
(IC)
So, conditional on ensuring that the salesperson will split her time across her two products, the firm
maximizes expected profits. Equation (27) is the individual rationality constraint which ensures
that the agent accepts the contract.
constraints.
Equations (27) and (27) are the incentive compatibility
The former ensures that the agent chooses her effort optimally given the contract
design. The latter implements the agent’s effort split. Thus, we enforce the agent’s effort split
in the constraint rather than, equivalently, placing it in a “benefit function.”
Given the model set up, we can solve for the salary component of compensation explicitly
1
α = C (·) + Ln[{ pa (1 − pb ) Ea
r
+pb (1 − pa ) Eb + pa pb Eab
(27)
+ (1 − pa ) (1 − pb )}]
In order to analyze the incentive compatibility problem, we present in Table 1 the agent’s expected
utility from each possible effort choice. Note that we only present four of the six possible effort
choices due to symmetry.
The bottom row of Table 1 represents the salesperson’s equilibrium expected utility.
The
top three rows, then, give rise to three individual incentive compatibility constraints which we
denote IC00T , IC10T and IC20T , respectively. The superscript denotes whether the constraint is
associated with the territory structure or the product structure. To proceed with our analysis of
this problem, we begin by looking at contexts in which risk aversion is relatively “low.” We then
proceed to a context in which risk aversion is allowed to become arbitrarily high. The following
three Lemmas characterize the optimal “splitting” contract.
20
21
As well as the implicit assumption that prices are equal across products.
We present this analysis as if there is a single salesperson since there is assumed to be no interaction between
territories.
19
Effort Choice
Expected Utility
{0, 0}
1 − Exp [−rα]
{2, 0}
1 − Exp [−r (α − 2c)] {p20 Ea + (1 − p20 )}
{1, 0}
{1, 1}
1 − Exp [−r (α − c)] {p10 Ea + (1 − p10 )}
1 − Exp [−r (α − 2c)] {p11 (1 − p11 ) Ea + p11 (1 − p11 ) Eb + p11 p11 Eab + (1 − p11 ) (1 − p11 )}
Table 1: Expected Utilities in the Territory Structure
Lemma 2 In the program in (26), the optimal contract always has β ∗a = β ∗b .
Lemma 3 In the program in (26), IC10T always binds in equilibrium.
Lemma 4 As p11 → 12 , IC00T binds in equilibrium in addition to IC10T .
The two panels of Figure 3 demonstrate the equilibrium contracts for “strong substitutes” (i.e.,
as p11 → 12 ) and “strong complements” (p11 → 1).22 Since, for strong substitutes, the equilibrium
contract lies at the intersection of two constraints, it is straightforward to solve explicitly for the
bonuses. This yields the following single sale bonus:
∙
¸
Exp [−rc] − (1 − p10 )
1
β ∗ = − Ln
r
p10
(28)
and the corresponding β ∗ab as given by IC10T and IC00T . Note that we can transform this in the
following manner:
1 − Exp [rc] [p10 Exp [−rβ ∗ ] + 1 − p10 ] = 0
(29)
By inspection of (29), it is clear what the role of β ∗ is in this region of the parameter space.
Effectively, the single-sale bonus compensates the salesperson for putting one unit of effort behind
the product.
This is isomorphic to (16) in the single product model.
accomplishes the difficult task of enforcing the effort split.
Thus, it is β ab that
Further evidence that, when the
products are strong substitutes, β is set with disregard for the multi-product nature of the problem
lies in the fact that (28) is not a function of p11 .
Note also that, as in Section 3.2, since the agent’s “best alternative” in this region is a low risk
one, α∗ = U . There is absolutely no insurance provided in this salary. Since the agent’s decision
about both risk and effort occurs “on line,” the salary cannot compensate her for either.
From Proposition 2, we also know that
∂β ∗
∂r
> 0 in this region: more risk averse agents receive
higher single-sale bonuses. The following Proposition shows that the same is true of β ∗ab :
22
Note that one byproduct of our assumption that p10 <
2
3
is that it the salesperson always increases her probability
of a sale by choosing {1, 1} compared with choosing {1, 0}.
potentially untenable contexts.
20
If p10 were allowed to approach 1, we would admit
βab
βab
IC20
IC10
IC20
IC00
IC00
β
β
(i) Strong Substitutes
(ii) Strong Complements
Figure 3: Optimal Contracts: In panel (i), we see the optimal contract when the products are
substitutes.
In this case, the isoprofit curves are tangent to IC10 at lower levels of β and β ab
but such a contract would not satisfy IC00. On the other hand, panel (ii) shows that, when the
products are strong complements, then the firm chooses the contract {β, β ab } to maximize profits
subject only to IC10.
21
Proposition 6 When the products are strong substitutes,
∂β ∗ab
∂r
> 0.Further, bonuses make up a
higher proportion of the agent’s compensation the more risk averse she is.
So, we again yield the surprising result that, when products are substitutes, the agent is making
more of her money via risky compensation than via salary. The intuition is based on the fact that
the firm must compensate her for all of her risk in the bonuses themselves. As she gets more risk
averse, this compensation must increase.
The preceding results focused on relatively low levels of risk aversion, which ensured that a
contract always exists in which the firm can accomplish the effort split it desires. The following
result shows, however, that this is not true of all levels of risk aversion:
³ 0´
³ 0´
0
Proposition 7 For all β , there exists an r β such that for all r > r β , there is no contract
´
³ 0´
³ 0
β , β ab to enforce an effort split across the two products. Moreover r β is increasing in p11 .
So, for salespeople that dislike risk “enough,” the firm can never choose the incentive approach.
This can be seen in the expression for IC10T :
Eab =
[p10 Exp [−rc] − 2p11 (1 − p11 )] E + Exp [−rc] (1 − p10 ) − (1 − p11 )2
p211
(30)
Note what happens as the salesperson gets very risk averse. The RHS of (30) becomes negative for
high enough values of r. The fact that r is increasing in p11 means that it is particularly difficult to
create incentive schemes that ensure that salespeople allocate enough time to each product when
those products are substitutes. The intuition is clear: the more risk averse the agent is, the more
she needs to be compensated for her risk in the form of the bonus. However, at the same time,
the more risk averse she is the less effective a marginal increase in β ab becomes. Eventually, it
becomes impossible to compensate her enough.
Proposition 7 is stated in such a way that it assumes that the firm’s technology is fixed but
that it might be able to find the “right” salespeople (that is, those with low enough risk aversion)
to implement the desired effort split.
This may not always be true..
First, it is not trivial to
determine perfectly an agent’s risk aversion during the interview process. Moreover, there may be
a significant cost associated with finding, hiring and training new salespeople (and with identifying
and firing existing ones).
Thus, we restate Proposition 7 from a different perspective.
In this
Corollary, we effectively take the salespeople as a given and ask which technologies would allow
for the effort split.
³ 0´
0
Corollary 2 When r is high enough, for all β , there exists a p11 β such that for all p11 <
³ 0´
³ 0
´
p11 β , there is no contract β , β ab to enforce an effort split across the two products. Moreover
³ 0´
p11 β is increasing in r.
22
The lower is p11 , the harder it is for the firm to implement the effort split. As p11 → 12 , the
salesperson is asked to bear more and more risk. The more risk averse she becomes, the harder it
is to provide her — via bonuses — sufficient insurance for this risk.
This Section has, thus far, painted a fairly pessimistic picture of the firm’s ability to encourage
agents to split their time across products, particularly across substitute products.
As noted in
the discussion at the beginning of the Section, an alternative approach is to structure the sales
force along product lines. This accomplishes two things. First and foremost, it guarantees that
there will be effort on both products.
More generally, this approach allows the firm to control
more precisely the level of effort being placed on each product.
4.2
Product Structure
In this context, the salesperson is responsible for selling a single product to multiple (in this
stylized model, two) customers.
The key difference between selling to multiple customers as
compared with selling multiple products is that products are related while customers are, relatively
speaking, independent. Effort placed on one customer is assumed to have negligible impact on
one’s likelihood of selling to another customer.
In this case, we subscript the customers with the number j = 1, 2.
The firm pays β 1 if the
salesperson makes a sales to customer 1 only and β 2 if she only sells to customer 2 and β 12 if she
sells to both customers.
In addition, the firm pays a salary α regardless of the sales outcome.
Above, in Section 4.1, we modeled a context in which the firm wanted the salesperson to split her
time across products. Here, we capture an analogous objective in which the firm seeks to deliver a
unit of effort on each product at each customer.23 An aspect of the problem that is important in
the product structure though not in the territory structure is the relative sizes of the market and
the sales staff. Specifically, do we have enough salespeople to cover the market? We assume here
that the answer is “yes.” Precisely, we assume that, in the product structure, every customer will
“see” a salesperson selling product a and a salesperson selling product b.24 This adds significant
complexity to the modeling since, due to the relationship between the products, the impact of one
salesperson’s effort on customer j will be a function of the other salesperson’s effort at customer
23
In fact, given that the primary objective in this Section is to investigate the firm’s goal of getting effort on two
products, one may argue that this is always accomplished by construction since each salesperson is only allowed to
sell one product. In this sense, then, we can think of the profits earned by the firm under the constraint that effort
is split across customers as weakly less than what the firm might earn without such a constraint.
24
As shown in Godes (2003b), the assumption about the match between the market size and the size of the sales
force may have an important impact. However, in our model here, this is not the case. It is straightforeward to
show that the qualitative results provided below in a model of “full overlap” are also obtained in a model in which
there is “zero overlap.” In such a model, salespeople sell either product a or product b, but each firm only sees one
salesperson.
23
j even though they’re selling different products (see Figure 2). Specifically, to capture this, we
maintain the representation of salesperson i’s (that is, the salesperson dedicated to selling product
¢
¡
i) effort choice as the pair ei1 , ei2 . We now capture the probability of a sale as follows:
(31)
Pr [customer j buys product a] = pea ,eb
j
j
This is consistent with the notation above in that, here, p11 for example is the probability that a
customer buys a product given that there’s one unit of effort placed on selling him this product
and one unit of effort placed on selling him the other product. The only difference here is that the
sales presentations are coming from two different salespeople.
Given this specification and objective, the firm’s problem for product (and therefore salesperson)
i is the following:
M axα,β 1 ,β 2 ,β 12 2 [p11 (1 − p11 ) (1 − β 1 ) + p11 (1 − p11 ) (1 − β 2 ) + p11 p11 (2 − β 12 )] − α(32)
s.t.
£
¤
E U |ei1 , ei2 ≥ 0
∗
ei1
(33)
∗
ei2
=
=1
h h
o
ii
n ∗ ∗o
n ∗
−i∗
i
i
,
α,
β
e1 , e2 ∈ arg max E U i | e−i
,
e
,
β
,
β
1 2 12
1
2
(34)
(35)
In comparing (32) with (26), the only substantive difference lies in the incentive compatibility
constraints (35) and (27). In the latter, there was no interaction between the salespeople. Thus,
they each chose their effort levels independent of the other to maximize their utility. Here, the
firm’s choice of contract parameters is assumed to implement a non-cooperative game between
the salespeople in which their choice, and allocation, of effort will impact the other.
Imagine,
for example, a car dealership that has a Ford and a Toyota showroom right next door to each
other, each with its own dedicated sales team. The level of effort that a Ford salesperson places
on a customer will have an impact on the likelihood that customer will buy a Toyota.
Thus,
our solution of the problem must be a Nash equilibrium between the salespeople in which they
provide their optimal effort level and allocation conditional on the other salesperson’s effort level
and allocation.
The salesperson’s expected utility for any given effort choice by both agents in this structure
is:
³
´
¤
£
−i
1
−
p
Exp [−rβ 1 ]
,
e
,
α,
β
,
β
,
β
=
Exp
[−r
(α
−
C
(·))]
{p
E U i |ei1 , ei2 , e−i
−i
−i
i
i
1
2
12
1
2
e ,e
e1 ,e1
³
´ 1 1
+pei ,e−i 1 − pei ,e−i Exp [−rβ 2 ]
(36)
2 2
2 2
³
´³
´
+pei ,e−i · pei ,e−i Exp [−rβ 12 ] + 1 − pei ,e−i 1 − pei ,e−i }
1
1
2
2
1
1
2
2
Thus, analogous to Table 1, we construct a table with agent i’s expected utilities, conditional on
salesperson −i’s equilibrium effort choice of {1, 1}:
24
Effort Choice
Expected Utility
{0, 0}
1 − Exp [−rα]
{2, 0}
1 − Exp [−r (α − 2c)] {p21 E1 + (1 − p21 )}
{1, 0}
1 − Exp [−r (α − c)] {p11 E1 + (1 − p11 )}
{1, 1}
1 − Exp [−r (α − 2c)] {p11 (1 − p11 ) E1 + p11 (1 − p11 ) E2 + p11 p11 E12 + (1 − p11 ) (1 − p11 )}
Table 2: Expected Utilities in the Product Structure
where the E’s are defined analogously to above. Note that IC00T is exactly the same as IC00P .
The key differences between the product case and the territory case are seen in IC10P and IC20P .
In the former, a deviation by salesperson i to {1, 0} simply results in her implementing p11 at one
customer since salesperson −i’s equilibrium action is to place a unit of effort on that product at
that customer. For the same reason, a deviation to {2, 0} implements a probability of p21 . Since
IC00P and IC11P are isomorphic to the territory case as are equilibrium firm profits, we know
that IC10P binds in equilibrium here as well (see Lemma 3).
For any β,we define β Tab (β) and β P12 (β) as the dual-sale bonuses that satisfy IC10T and IC10P
respectively with equality.
Proposition 8 For a given β, β Tab (β) > (<) β P12 (β) if the products are substitutes (complements).
¯
¯
Moreover, ¯β T (β) − β P12 (β)¯ is increasing in r.
ab
Put differently the (binding) constraint IC10 is strictly higher in the territory structure as
compared with the product structure when the products are substitutes (when p11 < p10 ). On the
other hand, this constraint is lower in the territory structure when the products are complements
(when p11 > p10 ). Thus, we have shown in two ways that substitutes are ceteris paribus better
sold through a product structure and complements through a territory structure. On one hand,
the firm may not even be able to split the salesperson’s effort across products in the territory
structure. Clearly, by construction, this will always happen in the product structure.25 However,
as Proposition 8 shows, even when the effort split is implementable, the high risk associated with
substitute products renders the product structure a better choice. This is because in the product
structure, the firm removes some of the risk selection authority from the salesperson. As noted
above, her deviation to {1, 0} does not reduce her risk to the same extent that it did in the territory
structure. Thus, her “best alternative” is somewhat less attractive under the territory case and
incentive compatibility is easier to achieve with a lower β 12 .
Since profit is always decreasing
in β 12 , this improves firm profits. On the other hand, when the products are complements, the
agent’s deviation to {1, 0} is actually more attractive than it was under the product case. The fact
25
That is, even if the salesperson doesn’t split her time across customers, the firm will always be getting some
effort on product a and some on product b.
25
βab
IC10P (p11>p10)
IC20T
IC10T
IC10P (p11<p10)
Π1
2
Π
Π3
IC00T
β
Figure 4: Optimal Contracts in the Territory Structure vs. Product Structure: Firm profits in
the territory structure lie on the isoprofit curve Π2 . When the products are complements (when
p11 > p10 ), the binding IC10 constraint is higher in the product structure than the territory
structure. Thus, the firm’s profits in the product structure lie on a strictly lower isoprofit curve
(Π1 ).
When the products are substitutes, the reverse is true.
product structure are on a higher isoprofit
In this case, firm profits in the
(Π3 ).
that the other agent is putting forth effort means that it’s a less-risky alternative. Finally, while
the product relationship also results in an impact on the expected sales outcomes (i.e., affecting
both the means and the variances), the fact that the effect is increasing in r demonstrates clearly
that risk — and the agent’s ability to control that risk via her choice of effort level — is a principal
driving force behind the result.
It is straightforward to show, for example, that as r → 0,
β Tab (β) − β P12 (β) → 0 for all β. See Figure 4 for a graphical representation of the results.
5
Conclusion and Directions for Future Research
The main contributions made by this paper are twofold. It is the first paper, to our knowledge,
to explicitly consider the impact on sales force contracting of an agent’s preference for selecting
actions that result in lower risk.
We analyzed two general contexts.
In the first, the firm’s
preferred action represented a “moderate” level of risk for the agent. The objectives of the two
parties, then, were not in strong conflict.
The main insight of this model was that the firm
cannot depend on salary to provide the “insurance” sought by the salesperson.
One typically
thinks of insurance as covering factors largely outside of the agent’s control (think of buying auto
26
theft insurance). On the contrary, the agent in our model chooses her risk level. This has the
fascinating implication that, in some cases, the proportion of an agent’s salary that comes from
salary (as compared with “pay-at-risk”) increases in the agent’s level of risk aversion.
The other context we studied is one in which the goals of the firm and the agent are more
at-odds. This was introduced first in a one-product context. The core result from this model was
that the firm may not be able to design any scheme to implement the effort level it desires. Because
the risk is endogenous, the “insurance” must come in the form of higher bonuses. Moreover, the
more risk averse the agent is, the higher these bonuses have to be. When the agent is risk averse
enough, the firm needs to offer her such a high bonus that she always prefers higher effort than
the firm wants. This highlights the fact that the “accuracy” of incentive schemes — the ability of
a firm to design a compensation plan to encourage the agent to do whatever — is in question when
risk is endogenous. In this case, we offer the solution that monitoring may be a useful alternative
in lieu of direct incentives.
Finally, we bring these ideas together in a two-product model. We assume that the firm wants
the salesperson to “split” her time across the two products. In this case we show that, again, the
firm may not be able to design a scheme that results in the agent splitting her time. When she
is risk averse enough, she’s not willing to accept the risk associated with this effort choice. This
problem is particularly acute for products that are technological substitutes (for which the effort
placed on one product decreases the probability that the other is sold). In this context, we offer as
a solution the re-structuring of the sales force along product lines. This has two potential benefits.
First, it always ensures that some effort is placed on each product. Moreover, when the products
are technological substitutes, it’s easier to achieve the specific levels of effort desired. On the other
hand when the products are technological complements, the product structure performs less well.
This echoes the themes in the single product model. When a single agent sell both products, her
objective of risk reduction and the firm’s desire that she split her effort are not in strong conflict
when the products are complements but they are when the products are substitutes. Thus, we
argue, due to the impact of endogenous risk, the firm might consider selling substitutes through
product structures and complements through territory structures.
The second major contribution of this work is to offer a model that may better explain realworld sales force contracting decisions. Our result on risk aversion and the proportion of salary in
a compensation scheme may explain the trouble that some empirical modelers have had in generating significant results for risk and risk aversion. Moreover, while noting the obvious semantic and
practical distinctions between our definition of “complementarity” and those employed by Holmstrom and Milgrom (1991), we nevertheless suggest that our prescriptions for sales force structure
may match more cleanly with actual practice. Empirical work to test these two predictions would
be useful.
27
There are many directions in which these ideas should be extended.
First, it is important
that the ideas be shown to be robust to more general model specifications.
In Godes (2003a),
it is shown, for example, that some of the results in Section 3.2 hold in a continuous model as
well. Beyond effort, however, it would be important consider other “risk functions” — risk as a
function of effort, action or choice — than the simple binary model we employ here.
While the
binary outcome is attractive in large part because it frees us from having to specify separately the
“revenue” and the “risk,” this lack of flexibility is unattractive as well. More applied modeling
that looked at, for example, the salesperson’s choice of customer of different type or profile would
be useful and potentially quite insightful.
Additionally, our assumption that the agent has a single control (effort) that drives two important outcomes (probability and variance) is limiting. More realistic would be a model that gave
her more controls (for example, choice of customer type and choice of effort). This would allow
her the flexibility to seek profit with one and risk reduction with the other. In Section 3.1, we
also hint at the possibility that the firm may actually prefer higher risk in some cases, as long as
it is endogenous risk.
This result has intuitive appeal as it may explain the use of contests or
lotteries, which the current theory may not be able to explain. It would be useful to investigate
this phenomenon and provide a more rigorous explanation for it. A useful starting point may be
Godes (2003a) which specifies a linear output model in which there is an exogenous noise term.
There, it is shown that the firm may add another noise term, the variance of which is under the
agent’s control.
The idea that the firm may take actions to drive or shape the risk function is an appealing
one and can be extended in a number of directions. Besides contests, one might also argue that
one of the key impacts of quota schemes is to “endogenize” previously exogenous risk. It may be
useful, then, to investigate the extent to which the success of such schemes is principally due to
the agent’s desire for the “big score,” on one hand, or her desire to reduce the risk that she doesn’t
get it, on the other.
Finally, while the approach we have taken here is analytical, we believe that empirical and
experimental work into the phenomenon of endogenous risk would be very important. One could
also envision a series of experiments comparing the results under exogenous vs endogenous risk.
Specifically, one could envision an experimental test of the prediction that the firm is not able to
implement “risky” or “interior” outcomes for highly risk-averse agents.
28
References
Bakos, Y. and E. Brynjolfsson (1999, December). Bundling information goods: Pricing, profits
and efficiency. Management Science 45 (12), 1613—1630.
Baron, D. P. and D. Besanko (1987, Winter). Monitoring, moral hazard, asymmetric information,
and risk sharing in procurement contracting. RAND Journal of Economics 18 (4), 509—32.
Basu, A., R. Lal, V. Srinivasan, and R. Staelin (1985). Salesforce compensation plans: an agency
theoretic perspective. marketing science 4 (4), 267—91.
Chevalier, J. and G. Ellison (1997, December). Risk taking by mutual funds in response to
incentives. Journal of Political Economy 105 (6), 1167—1200.
Churchill, G. A., N. M. Ford, and O. C. Walker (1985). Sales Force Management: Planning,
Implementation and Control. Homewood, IL: Richard D. Irwin, Inc.
Cravens, D. W., T. N. Ingram, R. W. LaForge, and C. E. Young (1993). Behavior-based and
outcome-based salesforce control systems. Journal of Marketing 57, 47—59.
Easton, A. (1976). Sales quota achievement indices for multi-product firms. Industrial Marketing
Management 5, 77—87.
Gilbert, R. J. and M. H. Riordan (1995, Summer). Regulating complementary products: A
comparative institutional analysis. RAND Journal of Economics 26 (2), 243—56.
Godes, D. (2003a). Sales force contracting under endogenous risk. Harvard Business School
Working Paper .
Godes, D. B. (2003b). In the eye of the beholder: An analysis of the relative value of a top sales
rep across firms and products. Marketing Science 22 (2).
Hauser, J., D. Simester, and B. Wernerfelt (1994). Customer satisfaction incentives. Marketing
Science 13 (4), 327—50.
Holmstrom, B. (1979). Moral hazard and observability. Bell Journal of Economics 10, 74—91.
Holmstrom, B. and P. Milgrom (1987, March). Aggregation and linearity in the provision of
intertemporal incentives. Econometrica 55, 303—28.
Holmstrom, B. and P. Milgrom (1991). Multitask principal-agent analyses: Incentive contracts,
asset ownership, and job design. Journal of Law, Economics, and Organization 7, 24—52.
29
John, G. and B. Weitz (1989, February). Salesforce compensation: An empirical investigation of
factors related to use of salary versus incentive copmensation. journal of marketing research 26,
1—14.
Lal, R. and V. Srinivasan (1993). Compensation plans for single- and multi-product salesforces:
an application of the holmstrom-milgrom model. management science 39 (7), 777—93.
Lal, R. and R. Staelin (1986). Salesforce compensation plans in environments with asymmetric
information. Marketing Science 5, 179—98.
Mirrlees, J. (1974). Notes on Welfare Economics, Information and Uncertainty. Amsterdam:
North Holland.
Pratt, J. W. (1965). Risk aversion in the large and in the small. Econometrica 32, 122—136.
Raju, J. S. and V. Srinivasan (1996). Quota-based compensation plans multi-territory salesforces.
management science 42 (10), 1454—1462.
Rangaswamy, A., P. Sinha, and A. Zoltners (1990). An integrated model-based approach for sales
force structuring. Marketing Science 9 (4), 279—98.
Rao, R. (1990). Compensating heterogeneous salesforces: some explicit solutions. marketing
science.
Sarvary, M. and P. M. Parker (1997). Marketing information: A competitive analysis. Marketing
Science 16 (1), 24—38.
Schmalensee, R. (1978). Entry deterrence in the ready-to-eat breakfast cereal industry. Bell
Journal of Economics 9, 305—27.
Shapiro, B. (1979). Account Management and Sales Organization: New Developments in Practice.
Cambridge, MA: Marketing Science Institute.
Srinivasan, V. (1981). An investigation of the equal commission rate policy for a multi-product
salesforce. Management Science 27 (7), 731—56.
Walton, M. S. (1985, April 1). When incentive goals clash. Sales and Marketing Management,
66—9.
30
Appendix
Proof of Lemma 1: From (12) and (13), we know that IC0 requires that E ≤
E 0 while IC1 requires that E ≤
p2
p1
or
Exp[−rc](1−p1 )−(1−p2 )
p2 −p1 Exp[−rc]
≡ E 1 . Thus, IC0
Exp[−2rc]−(1−p2 )
≡
p2
1
binds iff E ≥ E 0
≥ Exp [−rc] + 1. This shows (a) and (b). Both cases can hold consistently with the
concavity assumption.
Proof of Proposition 1: From Lemma 1, we know that β = − 1r Ln
h
Exp(−2rc)−(1−p2 )
p2
is low relative to p2 . Substituting this into (9) proves the result.
i
when p1
Proof of Proposition 2: When p1 is low, IC0 binds. On this constraint, we know that β is
chosen such that Exp [−2rc] = p2 Exp [−rβ]+1−p2 ∀r, p2 , c. Thus, we can differentiate both
sides by r to yield the equality −2cExp [−2rc] = −βp2 Exp [−rβ] ∂β
∂r . By application of the
implicit function theorem, then, we can rearrange and
∂β
∂r
=
2cExp[−2rc]
βp2 Exp[−rβ]
> 0. Performing
∂β
−1
the same differentiation with respect to p2 yields 0 = Exp [−rβ] − rp2 Exp [−rβ] ∂p
2
∂β
∂p2
or
=
Exp[−rβ]−1
rp2 Exp[−rβ]
< 0.
When p1 is high, IC1 binds so β is chosen to solve the
equality p1 Exp [−rβ] + 1 − p1 = Exp [rc] [p2 Exp [−rβ] + 1 − p2 ]. Again, applying the im-
plicit function theorem yields
∂β
∂r
=
cExp[rc](p2 Exp[−rβ]+1−p2 )
βExp[−rβ](p2 Exp[rc]−p1 )
which is positive if and only
p2
p1
> Exp [−rc] which is impossible since p2 > p1 and Exp [−rc] < 1. Performing the
h
i
∂β
∂β
same differentiation with respect to p2 yields −rp1 ∂p
E
=
Exp
[rc]
−rp
E
+
E
−
1
or
2
∂p2
2
if
∂β
∂p2
=
Exp[rc](E−1)
Er(Exp[rc]p2 −p1 )
< 0.
Proof of Corollary 1:
∗
p2 αβ ∗
∂
p2 p2
this
First, note that
— is decreasing in p2 .
∗
· β ∗ = β ∗ + p2 ∂β
∂p2 .
becomes β ∗ + E−1
rE .
∗
∗
1 > Exp [rβ ] − rβ .
When p1 is
α∗
α∗ +p2 β ∗
low, α∗
is increasing in p2 iff its inverse — 1 +
is not a function of p2 .
From the Proof of Proposition 2, we know that
Assume this is positive.
∗
Then, β >
1−E
rE
In this case,
∂β ∗
∂p2
∗
=
⇔ rβ >
This is a contradiction since Exp [x] − x > 1 for all x > 0.
the Proof of Proposition 2, we know that when p1 is high and, thus, IC1 binds,
Exp[rc]
p
Exp[rc]− p1
E−1
rp2 E
1−E
E
so
⇔
From
∂β
∂p2
=
. Thus, p∂2 p2 · β ∗ < 0. Since Equation (9) holds with equality, we know that
h
i
∂β ∗
∂
∂
=
sgn
sgn ∂α
(p
E
+
1
−
p
)
2
2 . ∂p2 (p2 E + 1 − p2 ) = E − 1 − rp2 E ∂p2 . Substituting
∂p2
∂p2
¸
∙
∗
Exp[rc]
> 0 where the inequality follows
yields
(E
−
1)
1
−
in the expression for ∂β
p
∂p2
Exp[rc]− 1
E−1
rp2 E
·
h
i
∗
2
p2
from the fact that
Exp[rc]
p
Exp[rc]− p1
> 1.
2
Proof of Proposition 3: When p1 < p1 , this is a straightforward implication of Proposition
2, which tells us that β ∗ is increasing in r and Proposition 1 which tells us that α∗ does not
change as long as IC0 binds. When p1 > p1 , IC1 binds. In this case, as shown in Proposition
31
2, β ∗ decreases in r. Since α∗ is chosen such that Exp [rα] = Exp [2rc] [p2 E + 1 − p2 ] for all r,
∗
∗
[2rc] [p2 E + 1 − p2 ]+
we can differentiate both sides with qrespect to r: α∗ ∂α
∂r Exp [rαk ] = 2cExp
∗ lr
i
h
∗ ∂β
2cExp[2rc][p
E+1−p
]+Exp[2rc]
−p
β
E
∗
∗
2
2
2
∂r
∂α∗
. Since ∂β
Exp [2rc] −p2 β ∗ ∂β
∂r E ⇔ ∂r =
∂r < 0,
α∗ Exp[rα∗ ]
∂α∗
∂r
> 0 which proves the result.
When p1 is high, IC1 binds.
Proof of Proposition 4:
On this constraint, we know that
β is chosen such that p1 Exp [−rβ] + 1 − p1 = Exp [rc] [p1 Exp [−rβ] + 1 − p2 ] ∀r, p2 , c.
∂β
Thus, we can differentiate both sides by p1 to yield Exp [−rβ] − rp1 ∂p
Exp [−rβ] − 1 =
1
∂β
Exp [−rβ] which, rearranged, is
−Exp [rc] rp2 ∂p
1
∂β
∂p1
=
1−Exp[−rβ]
rExp[−rβ][Exp[rc]p2 −p1 ]
> 0. Similarly,
we know that α is chosen such that Exp [rα] = Exp [2rc] [p2 Exp [−rβ] + 1 − p2 ]. Differenti-
∂β
∂α
Exp [rα] = −Exp [2rc] p2 r ∂p
Exp [−rβ] which,
ating both sides with respect to p1 yields r ∂p
1
1
rearranging, yields
∂α
∂p1
∂β
= −Exp [−r (α − 2rc)] p2 Exp [−rβ] ∂p
= −Exp [−r (α − 2rc)] p2 Exp [−rβ]·
1
1−Exp[−rβ]
= −p2 Exp[−r(α−2rc)]
(1 − Exp [−rβ]).
rExp[−rβ][Exp[rc]p
2 −p1 ]
h
ir[Exp[rc]p2 −p1 ]
1−Exp[−rβ]
+ p2 × Exp[−r(α−2rc)]
= −p2 rExp[−rβ][Exp[rc]p
r[Exp[rc]p2 −p1 ] × (1
2 −p1 ]
× (Exp [−r (α − 2rc)] − Exp [rβ]).
Now,
∂Π∗
∂p1
∂β
= −p2 ∂p
−
1
− Exp [−rβ]) =
Assume that this is positive.
Exp [−r (α − 2rc)] > Exp [rβ] ⇔ Exp [−r (α + β − 2rc)] > 1.
∂α
∂p1
p2 (1−Exp[−rβ])
r[Exp[rc]p2 −p1 ]
This implies that
However, we know that 1
= Exp [−rα] Exp [2rc] [p2 Exp [−rβ] + 1 − p2 ] > Exp [−r (α + β − 2rc)] where the inequality
follows from the fact that p2 Exp [−rβ] + 1 − p2 > Exp [−rβ].
Proof of Proposition 5: We know that IC00 requires that E ≤
IC20 requires that E ≥
binds if E 2 ≤ E 0 or p1 ≥
Exp[−2rc]−(1−p2 )
p2
≡ E 0 while
Exp[−rc](1−p1 )−(1−p2 )
≡ E 2 . Since profit is decreasing in β, IC00
p2 −p1 Exp[−rc]
p2
p2
Exp[−rc]+1 . If p1 < Exp[−rc]+1 , however, the two constraints cannot
be jointly satisfied.
h
i
Proof of Lemma 2: Since α = U + 2rc + 1r Ln p11 (1 − p11 ) (Ea + Eb ) + p211 Eab + (1 − p11 )2 ,
h
i
∂Π
i
= p11 (1 − p11 ) p (1−p )(E +E E)+p
Assume that for
it is clear that ∂β
2 E +(1−p )2 − 1 .
i
11
some β ab , β ∗a > β ∗b . Then, Ea < Eb and
11
∂Π
∂β a
a
b
<
∂Π
∂β b
11
ab
11
but then the firm can strictly increase
profits by increasing β b relative to β a .
Proof of Lemma 3:
We approach this proof in four steps:
without either IC10 or IC20 binding. (ii) Show that
Π10 ,
(i) show that IC00 can’t bind
profits along constraint IC10 have
a single global maximum, (iii) Show that Π10 is always decreasing at the intersection of IC10
and IC20 (and for all higher β) , (iv) Combine these results to show the claim.
Step (i): To show this, we first show that profit on IC00 is (a) concave in β a and (b) maximized
at β a = β ab , or along the 45o line in (β, βab) −space. Profits are Π = 2p11 (1 − p11 ) (1 − β)+
p211 (2 − β ab )−α. On IC00, the following expression always holds: Exp [−2rc] = 2p11 (1 − p11 ) E+
p211 Eab + (1 − p11 )2 .
Thus, as in Section 3.2, α∗ = 0.
32
Moreover, differentiating both
ab
sides of the with respect to β and applying the implicit function theorem yields ∂β
∂β =
³
´
00
11 )E
E
< 0. Thus, ∂Π
− 2p11p(1−p
2 E
∂β = 2p11 (1 − p11 ) Eab − 1 so that, as long as second-order
11
ab
2
00
∂
conditions hold, β ∗ = β ∗ab . Checking second-order conditions: ∂∂βΠ2 = K ∂β
Exp [−r (β − β ab )] =
´
³
2p11 (1−p11 )E
< 0. The next step is to show that, where IC00 and IC10 cross,
−r 1 +
p2 E
11
ab
2−p11
p11 Ea −
2
Exp[−2rc]−(1−p11 )
. Note
p11 (2−p11 )
β < β ab . This, along with strict concavity prove Step (i). Along IC00, Ea −Eab =
Exp[−2rc]−(1−p11 )2
p211
so Ea > Eab (and, therefore, β a < β ab ) iff Ea >
that simple rearrangement of the expressions for the two constraints shows that the β at
Exp[−rc]−(1−p10 )
. So, we’re looking for sufficient conditions in which
p10
Exp[−rc]−(1−p10 )
Exp[−2rc]−(1−p11 )2
11 )
>
. This can be transformed to 1 + Exp [−rc] > p11 (2−p
p10
p10
p11 (2−p11 )
11 )
which clearly holds for small enough c since p11 (2−p
≤ 2. Thus, we’ve shown that IC00
p10
which the cross is E =
can only hold if IC10 holds as well.
Step (ii): On IC10, α = U + c + 1r Ln [p10 E + 1 − p10 ]. Thus,
∂Π10
∂β
∂α∗
∂β .
= −2p11 (1 − p11 ) − p211
∂β ∗ab
∂β
−
E[p10 Exp(−rc)−2p11 (1−p11 )]
ab
On IC10, ∂β
which is positive by assumption that c
∂β =
Eab p2
p10 E
∂α
is small. Further, ∂β = − p10 E+1−p10 . Differentiating Π and substituting these expres10
E
E
sions yields ∂Π
∂β = Eab [2p11 (1 − p11 ) − Exp [−rc] p10 ] + Exp [−rc] p10 Ψ − 2p11 (1 − p11 ). To
see that this expression has a unique maximum (and is therefore quasi-concave)in β, note
that only EEab and E
are functions of β. Thus, if we can show that, given our assumption,
¯ ¯
¯ Ψ
¯
¯ ∂E/Eab ¯ ¯ ∂E/Ψ ¯
¯ ∂β ¯ > ¯ ∂β ¯ this proves that the two “curves” given by EEab [2p11 (1 − p11 ) − Exp [−rc] p10 ]
and Exp [−rc] p10 E
Ψ − 2p11 (1 − p11 ) can cross only once and the expression thus has a unique
maximum. Note that, since they’re both negative, we require that
∂E/Eab
∂β
<
∂E/Ψ
∂β .
Instead
∂E/Eab
∂E
> ∂E/Ψ
of showing this directly, we show that
∂E where we’ve dropped the absolute value
signs. These are equivalent by the chain rule since ∂E
β = −rE. Equivalently, we require that
∂E
∂Ψ
> Ψ ∂Eab . After substituting the expressions for the derivatives — ∂Ψ
Eab ∂E
∂E = Exp [−rc] p10
p10 Exp[−rc]−2p11 (1−p11 )
∂Eab
and ∂E =
— and rearranging this becomes K [2p11 − p10 (1 + p11 )] > 0
p211
2p11
where K > 0 ⇔ p10 < 1+p11 . Since the RHS is increasing in p11 , the assumption that p10 ≤ 23
proves the result.
Step (iii): We denote the β at which IC10 and IC20 intersect as β o . The corresponding E o =
(1−p20 )−Exp[−rc](1−p10 )
.
Exp[−rc]p10 −p20
o
Differentiating this with respect to p20 yields
1−Exp[−rc]
(Exp[−rc]p10 −p20 )2
>0
so β is strictly decreasing in p20 . Thus, the lowest β at which this occurs is when p20 = 1
and, thus, E o =
Exp[−rc](1−p10 )
1−Exp[−rc]p10 .
Note that this is precisely the same value of β (and thus
10
∂Π
E) at which E = Ψ. We can therefore substitute E
Ψ = 1 back into the expression for ∂β
h
i
10
E
to yield ∂Π
∂β = Eab − 1 [2p11 (1 − p11 ) − Exp [−rc] p10 ] < 0 where the inequality follows
from our assumption that 2p11 (1 − p11 ) < Exp [−rc] p10 (which we require for the existence
of β ab ) the fact that E > Eab always. As shown in Step (ii), if
33
∂Π10
∂β
< 0 at some β, it is also
negative for any higher β. This, combined
with the fact that β o is decreasing in p20 shows
¯
10 ¯
< 0.
that it will always be the case that ∂Π
∂β ¯
o
β=β
Step (iv): For this final step, we explicitly note in the profit expression the firm’s bonus choices:
¢
¡
We capture the constraint in the expression for β ab such that β 10
Π β, β 10
ab (β a ) .
ab (β) is
the β ab that corresponds to IC10 for a given β while β 20
ab is the equivalent quantity on
¢
¡
¢
¡ o
10
o
o
IC20. As shown in Step (iii), Π β − ε, β ab (β a − ε) > Π β o , β 10
ab (β a ) : the firm would
do strictly better by slightly decreasing the bonus from that at which IC10 and IC20 meet.
¡
¢
¡ o
¢
o
10
o
Equivalently, Π β o , β 10
ab (β a ) > Π β + ε, β ab (β a + ε) . Moreover, it is clear from the profit
function that Π (β, β ab ) > Π (β, β ab + η): conditional on constraints being satisfied, the firm
¡
¢
o
does strictly worse off increasing β ab . Combining these two yields: Π β o − ε, β 10
ab (β a − ε)
¢
¡ o
¢
¡ o
¢
¡
o
10
o
20
o
20
o
> Π β o , β 10
ab (β a ) > Π β + ε, β ab (β a + ε) > Π β + ε, β ab (β a + ε) since β ab (β a + ε) >
o
β 10
ab (β a + ε).
Proof of Proposition 4: As shown in the proof of Lemma 3,
+
Exp [−rc] p10 E
Ψ
∂Π10
∂β
=
E
Eab
[2p11 (1 − p11 ) − Exp [−rc] p10 ]
− 2p11 (1 − p11 ). Substituting in the value of β (via E) at which IC00
and IC10 intersect and taking the limit as p11 →
(Exp[−rc]+p10 −1)(3(1+Exp[−rc])p10 −2)
] where K ≥ 0.
2Exp[−rc]
3
as c → 0 yields 2p10 − 4 − [p10 (3p10 − 1)] = 3p10
1
2
3
4
yields K · [p10 (1 + Exp [−rc]) −
−
Taking the limit of the bracketed term
− 34 − 3p210 < 0. Thus, firm profits are
decreasing at the intersection of IC10 and IC00. Along with the fact that Π10 has a unique
maximum in β, this shows that IC00 will bind in this case.
Proof of Proposition 6: Substituting (28) into IC00T yields Exp [−2rc] = (Exp [−rc] − (1 − p10 ))+
2p11 (1−p11 )
< 1. Differentiating both sides by r and applying
p10
∂β ab
= cExp[−rc](2Exp[−rc]−Ω)
.
implicit function theorem yields ∂r = 2cExp[−2rc]−ΩcExp[−rc]
∗
∗
p2 Eab
p2 Eab
∗
low c, this is positive. Further, since α = U , the final part of the claim is obvious.
∗ . Note that Ω ≡
p211 Eab
the
For
Proof of Proposition 7: From (30), we know that when E (p10 Exp [−rc] − 2p11 (1 − p11 ))+
Exp [−rc] (1 − p10 ) − (1 − p11 )2 ≤ 0, then no such β ab exists.
Moreover, when r is high
enough, p10 Exp [−rc] − 2p11 (1 − p11 ) < 0 and Exp [−rc] (1 − p10 ) < (1 − p11 )2 .
proves the main claim.
Now, since the inequality holds strictly at r (β), we can differ-
entiate both sides by p11 and apply the implicit function theorem.
2(p11 −1)+2(1−2p11 )E
− cExp[−rc](p
10 E+1−p10 )
Proof of Corollary 2:
This
This yields:
∂r
∂p11
=
> 0.
From (30), we know that when E (p10 Exp [−rc] − 2p11 (1 − p11 )) +
Exp [−rc] (1 − p10 ) − (1 − p11 )2 ≤ 0, then no such β ab exists. The inequality holds strictly
at p11 (β), so we can differentiate both sides by r and apply the implicit function theorem.
This yields:
∂p11
∂r
=
c[Exp−rc]
1
2 E(2p11 −1)+1−p11
> 0.
34
T
2
Proof
³ of Proposition 8: Under´IC10 , we have Exp [rc] p11 Eab = p10 E + 1 − p10 − Exp [rc] ·
2p11 (1 − p11 ) E + (1 − p11 )2 and under IC10P we have Exp [rc] p211 Eab = p11 E + 1−p11 −
´
³
Exp [rc] · 2p11 (1 − p11 ) E + (1 − p11 )2 . Subtracting the latter from the former yields for a
given E (and therefore β): Exp [−rc] p211 (Eab − E12 ) = (1 − E) (p11 − p10 ) ⇔ (Eab − E12 ) =
(1−E)(p11 −p10 )
.
p211 Exp[−rc]
Clearly, when p11 > p10 (when the products are complements), Eab > E12 or
β ab (β) < β 12 (β). The vice versa is also true. Moreover, it is clear that the RHS of this
equation is increasing in r.
35