Statistical Quality Control: IOE 466 Lecture 1
advertisement

List of Topics in Lecture 1
IOE 466
Statistical Quality Control
• What are the course grading rules?
• What do you expect to learn from this course?
• Introduction of SPC
– Why is quality control important?
– Introduce quality engineering terminology
– Evolution of SPC methods
• What are the statistical methods for quality improvement?
• Examples: How to use SPC in real applications?
(MW 12:00 – 1:30pm, Chrysler Center media classroom #165)
Instructor: Prof. Jianjun Shi
1784 IOE
Department of Industrial and Operations Engineering
The University of Michigan
shihang@umich.edu, 734-763-5321(O), 734-764-3451(Fax)
J. Shi, the University of Michigan, shihang@umich.edu, 734-763-5321(O)
1
J. Shi, the University of Michigan, shihang@umich.edu, 734-763-5321(O)
Background Overview
• INSTRUCTORS
- Background
- Availability
• GSIs
- Justin Wayne Kile
- Yu-Li Huang
• CPD Student Support
- Hongbin Jia
• TEXT
- Author
- Prerequisites
- Other References
- Coursepack
2
Introduce Yourself to Others
(2 minutes)
<jwkile@engin.umich.edu
<yuli@engin.umich.edu>
•
•
•
•
<hjia@engin.umich.edu>
Name
Department
Undergraduate or graduate students?
Other Background and more?
• COURSE
- Attendance Policy
- Computers
J. Shi, the University of Michigan, shihang@umich.edu, 734-763-5321(O)
3
J. Shi, the University of Michigan, shihang@umich.edu, 734-763-5321(O)
4
Prerequisites: Review Questions
How many “Yes” do you get?
•
•
•
•
•
•
•
•
•
More Questions
Do you know what is Normal distribution?
Do you know the difference between mean and median?
Do you know how to calculate the variance of a sample?
Do you know the meaning of p-value in hypothesis
testing?
If X follows normal distribution with mean 2 and
standard deviation 3, do you know how to use table to
get the probability of X<0?
Do you know what is type I and type II errors in
hypothesis testing?
Do you know what is partial derivative?
Can you calculate the integral and derivative of x2?
Do you know how to calculate the inverse of a 2-by-2
matrix and the product of any two matrices by hand?
J. Shi, the University of Michigan, shihang@umich.edu, 734-763-5321(O)
• Are you familiar with hypogeometric distribution, Binomial
distribution and Poisson distribution?
• Do you know how to estimate and test the difference in
variances of two normal distribution?
• Are you familiar with OC-curves?
• Do you know when should use S chart and when use R
chart to monitor process variability?
• Do you know what’s the advantage of CUSUM and EWMA
chart to Shewhart control chart?
• Do you know PCR and PCRk?
• Do you know p-chart?
5
J. Shi, the University of Michigan, shihang@umich.edu, 734-763-5321(O)
IOE 466
Statistical Quality Control
Grading Policy
• Homework
• Exam 1
• Exam 2
6
30%
35%
35%
•
•
•
•
- Homework should be handed in during class on the due date;
Fundamentals of Engineering Statistics
Statistical Methods in Quality Improvements
Statistical Process Control
Introduction to Advanced Quality Control
Topics
- No late homework is acceptable;
J. Shi, the University of Michigan, shihang@umich.edu, 734-763-5321(O)
7
J. Shi, the University of Michigan, shihang@umich.edu, 734-763-5321(O)
8
C OURSE O VERVIEW
Objectives
• Introduce statistical tools and concepts
that are useful for product/process quality
improvements
• Demonstrate the procedures of
implementation of the quality engineering
tools in various applications
• This is NOT a course on mathematical
statistics
J. Shi, the University of Michigan, shihang@umich.edu, 734-763-5321(O)
PRODUCTION
PROCESS
• Leave Alone
• Adjust
• Stop
"Feedback"
"Charting"
9
J. Shi, the University of Michigan, shihang@umich.edu, 734-763-5321(O)
Analysis of
Variations
"Feedforward"
"Process Capability Analysis"
J. Shi, the University of Michigan, shihang@umich.edu, 734-763-5321(O)
10
WHY IS QUALITY IMPORTANT?
--- Quality, Productivity and Cost
Contents
• Statistical Methods: Modeling & Inferences
• Statistical Process Control:
– Philosophy
– Control Charts
• Process Capability Analysis
• Advanced Topics
– SPC for Short Run
– Multivariate Quality Control
– SPC with Correlated Data
– Frontier of the Current Research Ideas
• Acceptance Sampling
Measurement
(Samples)
• Accept
• Rework
• Scrap
Ch.2 - Ch3
Ch.4
Ch.5,Ch.6 & Ch8
Ch.7
Ch 9, 10, 11
1. Consumer awareness and quality / performance
sensitive.
2. Product liability laws.
3. Costs of labor, energy, and materials.
4. Competition is doing it.
5. Quality, Productivity and Cost are
complementary !
Ch14
11
J. Shi, the University of Michigan, shihang@umich.edu, 734-763-5321(O)
12
How to describe a product
not meet “Quality” requirements?
Quality Engineering Terminology
— “Quality” Definitions
• Quality means fitness for use
• Quality is evaluated by the variability,
which is inversely proportional to the
variability
• Quality improvement is the reduction of
variability in processes and products
J. Shi, the University of Michigan, shihang@umich.edu, 734-763-5321(O)
13
TWO COMPONENTS OF QUALITY
Manufacturing Industries
•
Nonconforming unit—A unit of product or service containing at
least one nonconformity .
•
Defect—A departure of a quality characteristic from its intended
level or state that occurs with a severity sufficient to cause an
associated product or service not to satisfy intended normal, or
reasonably foreseeable usage requirements.
•
Defective (Defective Unit)—A unit of product or service containing
at least one defect, or having several imperfections that in
combination cause the unit not to satisfy intended normal, or
reasonably foreseeable, usage requirements.
J. Shi, the University of Michigan, shihang@umich.edu, 734-763-5321(O)
14
Quality Engineering and Process Characteristics
• Quality Engineering:
Accuracy
Timeliness
Completeness
Friendliness and courtesy
Anticipating customer needs
Knowledge of server
Esthetics
Reputation
– A set of operational, managerial and engineering activity to ensure the
quality characteristics at a nominal level
• Attributes/Variables depend on the measurements of the
quality characteristics
– attributes: discrete data
• to judge each product as either conforming or non-conforming, or to
count the number of nonconformities appearing on a unit of product
– variables:continuous measurement of quality
characteristics
• Specifications: desired measurements for the quality
characteristics
Freedom from deficiencies
Product free of defects
and errors at delivery,
during use, and during
servicing
Nonconformity—A departure of a quality characteristic from its
intended level or state that occurs with a severity sufficient to
cause an associated product or service not to meet a specification
requirement.
Service Industries
Product features
Performance
Reliability
Durability
Ease of use
Serviceability
Aesthetics
Availability of options
and expandability
Reputation
•
Service free of errors
during original and future
service transactions
Sales, billing, and other
business processes free
of errors
J. Shi, the University of Michigan, shihang@umich.edu, 734-763-5321(O)
– upper/lower specification limits (USL/LSL)
15
J. Shi, the University of Michigan, shihang@umich.edu, 734-763-5321(O)
16
WHO’s Responsible for Quality?
It’s NOT My Job!!!
1. Product planning, marketing, and sales.
2. Development engineering.
3. Manufacturing engineering.
4. Purchasing.
5. Manufacturing management.
6. Manufacturing employees.
7. Inspection and test.
8. Packaging and shipping.
9. Customer service.
J. Shi, the University of Michigan, shihang@umich.edu, 734-763-5321(O)
17
•
This is a story about four people named EVERYBODY,
SOMEBODY, ANYBODY, and NOBODY.
•
There was an important job to be done, and EVERYBODY was
sure that SOMEBODY would do it. ANYBODY could have done it
but NOBODY did it. SOMEBODY got angry because it was
EVERYBODY'S job. EVERYBODY thought ANYBODY could do it,
but NOBODY realized that EVERYBODY wouldn’t do it. It ended
up that EVERYBODY blamed SOMEBODY when NOBODY did what
ANYBODY could have done.
J. Shi, the University of Michigan, shihang@umich.edu, 734-763-5321(O)
18
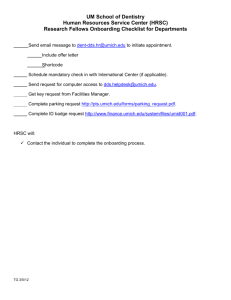
A Shewhart Control Chart
Dr. Shewhart first proposed usage of control chart in 1924,
which is the start of “statistical process control”
3
What are the statistical methods
for quality improvement?
UCL
2
mm
1
0
Average
-1
-2
LCL
-3
0
10
20
Time
J. Shi, the University of Michigan, shihang@umich.edu, 734-763-5321(O)
19
J. Shi, the University of Michigan, shihang@umich.edu, 734-763-5321(O)
20
Statistical Quality Control Methods
Typing Example
• Three major quality control methods are
– SPC,
– DOE (design of experiments), and
– acceptance sampling.
• This course will cover two of them: SPC and
acceptance sampling. DOE is covered in IOE 465.
• A simple example to illustrate the three methods:
A typing example.
J. Shi, the University of Michigan, shihang@umich.edu, 734-763-5321(O)
•
•
•
•
21
Consider improvement of typing quality, which is measured by typing
accuracy and clearness.
Acceptance sampling—several sample pages are inspected from
every “lot” (for example, every 100 typed pages). If the selected
sample pages have satisfactory quality, the whole “lot” is accepted.
Otherwise, the whole lot is rejected and rework should be done.
Statistical process control (SPC)—Every hour one page is selected
and its quality is measured. Plot the measurements from each hour
on a control chart. If a shift of quality is detected, the root cause of
this shift (such as typist tiredness, lack of ink) is identified and fixed.
Design of experiment (DOE)—Conduct experiments with
combinations of different typists, typewriters, papers, working
schedules. The best combination of these factors are selected to
achieve optimal typing quality.
J. Shi, the University of Michigan, shihang@umich.edu, 734-763-5321(O)
22
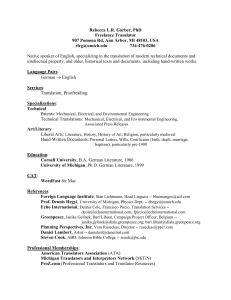
Variation Reduction
Approaches
Phases in Quality
Engineering Methods
100
Percent of Application
Acceptance
Sampling
Process
Control
Designed
Experiments
0
Time
J. Shi, the University of Michigan, shihang@umich.edu, 734-763-5321(O)
23
J. Shi, the University of Michigan, shihang@umich.edu, 734-763-5321(O)
24
SPC Example
Statistical Process Control Procedures
Quality Improvement Example
Process
Problem: Cowl side reinforcement panel I/O variation
Implementation
Take action
Observation
Data collection
Diagnosis
Faulty discovery
Decision
Formulate action
Evaluation
Data analysis
5L (y=3.16)
2L (y=2.91)
J. Shi, the University of Michigan, shihang@umich.edu, 734-763-5321(O)
25
J. Shi, the University of Michigan, shihang@umich.edu, 734-763-5321(O)
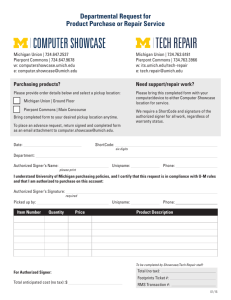
SPC Example (Cont’d)
26
SPC Example (Cont’d)
Quality Improvement Example
Quality Improvement Example
Root causes and action:
Data Analysis: spikes with a cycle of 26
Welding robot #3 after tip dressing, after 26 panels, skip two welding spots
4.0
04/10/92
Welding spots
3.5
Sample of 160
3.0
Y
[mm]
2.5
2.0
Missed welding spots
Cowlside Reinforcement panel
1.5
1.0
Evaluations
0.5
Time
BEFORE
CORRECTION
BEFORE
200
180
160
140
120
100
80
60
40
20
0
0.0
6 SIGMA
2 L_Y
2 L_Z
5 L_Y
5 L_Z
Process knowledge: welding robot changing tip dressing after 26 welding
J. Shi, the University of Michigan, shihang@umich.edu, 734-763-5321(O)
AFTER
Sensors
AFTER
CORRECTION
27
2.91
2.02
3.16
1.44
J. Shi, the University of Michigan, shihang@umich.edu, 734-763-5321(O)
6 SIGMA
1.0
1.4
2.0
0.9
28
Total Quality Person
Total Quality Management (TQM)
•
•
•
•
Statistical techniques must be implemented within a management system
that is quality driven.
One of the managerial frameworks used is total quality management.
TQM is a strategy for implementing and managing quality improvement
activities on an organization-wide basis.
TQM emphasizes on continuous improvements.
J. Shi, the University of Michigan, shihang@umich.edu, 734-763-5321(O)
Companies today are turning to total quality management to
improve their capabilities. To adapt to TQM, management
styles have had to change to new form of employee-employer
relationships. But what about the individuals involved in this
transformation? Are they TQM people?
29
J. Shi, the University of Michigan, shihang@umich.edu, 734-763-5321(O)
30
Planning
Personal Leadership
3. Every day I take time to plan my daily activities around
that which is important to me.
1. I take on responsibility for my actions and don’t rely on
others to plan my future.
Rarely
1
2
Sometimes
3
4
5
6
Always
7
8
9
Rarely
10
1
2. I enjoy the people and things in my environment.
Rarely
1
2
Sometimes
3
4
5
6
8
9
4
Rarely
10
1
J. Shi, the University of Michigan, shihang@umich.edu, 734-763-5321(O)
3
5
6
Always
7
8
9
10
4. I have a good sense of how personal values, strengths,
and weaknesses align with what I am doing.
Always
7
2
Sometimes
31
2
Sometimes
3
4
5
6
J. Shi, the University of Michigan, shihang@umich.edu, 734-763-5321(O)
Always
7
8
9
10
32
Improvement
Interpret Your Score
5. I constantly strive to measure whether I am meeting my
personal goals.
Rarely
1
2
Sometimes
3
4
5
6
12-17: Grade F. You might want to adopt some of these individual total
quality strategies to get your life back on track.
18-25: Grade D. You might want to analyze your daily living patterns
and goals in life. You do not demonstrate and individual total quality
philosophy.
Always
7
8
9
10
26-31: Grade C. You demonstrate some patterns of a total quality person
but need to more consistent on daily basis.
32-45: Grade B. You have a good individual foundation in total quality
principles and could serve as a role model for others.
6. I celebrate my successes and improvements.
Rarely
1
2
Sometimes
3
4
5
6
46-60: Grade A. You are a great total quality role model, with a solid set
of principles in leadership, planning, and continuous improvement.
Always
7
8
9
10
J. Shi, the University of Michigan, shihang@umich.edu, 734-763-5321(O)
33
Six-Sigma Program
34
Chapter 2: Probability Review
- Fundamentals of Engineering Statistics
• First developed by Motorola in the late 1980s.
• To reduce the process variability so that the
specification limits are six standard deviations
from the mean. Then there will only be about 2
parts per billion defective.
• Four phases of six sigma project:
Measure Analyze Improve Control
• SPC is a major tool of Six-Sigma
• An introduction to six-sigma is posted on course
web site.
J. Shi, the University of Michigan, shihang@umich.edu, 734-763-5321(O)
J. Shi, the University of Michigan, shihang@umich.edu, 734-763-5321(O)
• Describing Variation
– Frequency Distribution &
Histogram
– Numerical Summary of Data
– Probability Distribution
• Important Distributions
• Some Useful Approximations
35
J. Shi, the University of Michigan, shihang@umich.edu, 734-763-5321(O)
36
Need for Statistics
•
•
•
Some variation is inevitable in manufacturing
processes.
Variation reduction is one of the major
objectives in quality control
Variation needs to be described, modeled,
and analyzed
Describing Variation
Method 1: Frequency Distribution & Histogram
How to do it?
J. Shi, the University of Michigan, shihang@umich.edu, 734-763-5321(O)
37
J. Shi, the University of Michigan, shihang@umich.edu, 734-763-5321(O)
38
An Example:
Forged Piston Rings for Engines (Text Book P43-46)
•
Frequency Table & Frequency Histogram
Variable Data (Table 2-2, P44):
– the inside diameter of forged piston rings(mm)
– 125 observations, 25 samples of 5 observations each.
• To construct a frequency table
1. Find the range of the data
– start the lower limit for the first bin just slightly below the
smallest data value
– b0<min(x), bm=max(x), (m: # of bins)
2. Divide this range into a suitable number of equal intervals
– m=4 ~ 20, or N (N is the total number of observations)
3. Count the frequency of each interval
– if bi-1< x ≤ bi,
J. Shi, the University of Michigan, shihang@umich.edu, 734-763-5321(O)
39
J. Shi, the University of Michigan, shihang@umich.edu, 734-763-5321(O)
40
Frequency Distribution for Piston-Ring Diameter Table 2-3 (P45)
•
•
Data range b0=73.965, bN=74.030
– Min[x(i,j)]=73.967(i=14, j=2); max[x(i,j)]=74.030 i=1, j=1
# of Bin m=13, Interval=(74.030-73.965)/13=0.005
•
count for each bin: bi-1< x ≤ bi,
J. Shi, the University of Michigan, shihang@umich.edu, 734-763-5321(O)
Fig. 2-4 (P44)
Histogram for Piston-ring Diameter Data
- A graphical display of the frequency table
41
J. Shi, the University of Michigan, shihang@umich.edu, 734-763-5321(O)
42
Describing Variation
Method 2: Numerical Summary of Data
Interpretation based on the Frequency Histogram
• Center Tendency:
sample average
n
x=
Visual Display of Three Properties of Sample Data
•
•
•
Shape:
– roughly symmetric and unimodal
The center tendency or location
– the points tend to cluster near 74mm.
Scatter or spread range
– variability is relatively high (min=73.967; max=74.030)
∑x
i
i =1
n
• Scatter: sample variancen or sample standard deviation
σˆ 2 = S 2 =
∑(x − x)
i =1
2
i
n −1
;
• Shape: skewness and kurtosis
– skewness: measure the lack of symmetry of the distribution
βˆ 1 = 0 symmetry;
βˆ 1 < 0 mean<median
βˆ 1 > 0 mean>median;
– kurtosis: indicates the heaviness of the tails of the data distribution
larger β̂ 2 has a heavier tail
n
βˆ 1 =
J. Shi, the University of Michigan, shihang@umich.edu, 734-763-5321(O)
43
M3
M
; βˆ 2 = 42 ; M j =
(M 2 )3 / 2
M2
∑ (x
i =1
J. Shi, the University of Michigan, shihang@umich.edu, 734-763-5321(O)
i
− x) j
n
44
Theoretical & Sampling Distribution
Describing Variation
Method 3: Probability Distribution
Smoother
•
•
A Probability distribution is a mathematical model that relates the
value of the variable with the probability of occurrence of that
value in the population.
Two types of distributions:
– Continuous: if the variable being measured is expressed on a
continuous scale
– discrete :if the parameter being measured can only take on
certain values, e.g.. 1,2,3,4,..
f(x)
∞
∑ p( x
+∞
∫ f ( x )dx = 1
p(xi)
−∞
i
Increase samples
•
If we consider each interval as one unit, then each rectangle in the
histogram will have an area equal to its relative frequency. The
total area of the rectangles will be unity ∫ f ( x )dx = 1
+∞
−∞
•
If we could increase samples and make the intervals much smaller
and still maintain enough data for each interval. When the
intervals become narrower, the histogram will appear smoother.
•
Extending this concept to the extreme case where the histogram
becomes a smooth curve. This smooth curve is called a
“theoretical probability distribution” or “theoretical distribution”.
)=1
i=1
p(x4)
p(x3)
p(x5)
p(x2)
p(x6)
p(x1)
x
a b
p(x7)
x1 x2
J. Shi, the University of Michigan, shihang@umich.edu, 734-763-5321(O)
x3 x4
x5
x6
x7
x
45
J. Shi, the University of Michigan, shihang@umich.edu, 734-763-5321(O)
46
Review of Probability Distribution Calculation
Continuous Distribution
Probability
b
P { a ≤ x ≤ b ) = ∫ f ( x )dx
Important Distributions
Discrete Distribution
P ( x i ) = p( x i )
1. Discrete Probability Distribution
a
Distribution mean
µ=
• Hypergeometric distribution
• Binomial distribution
• Poisson Distribution
∞
+∞
µ = ∑ xi p( xi )
∫ xf ( x)dx
i =1
−∞
Distribution variance
+∞
V ( x ) = σ2 = ∫ ( x − µ)2 f ( x )dx
−∞
i =1
2. Continuous Probability Distribution
n
Sample mean
x=
Sample variance
∞
V ( x ) = σ2 = ∑ ( xi − µ)2 p( xi )
∑x
i =1
n
σˆ 2 = S 2 =
i
n
∑( x
i=1
i
• Normal distribution
• Chi-Square distribution
• Student t distribution
− x )2
n−1
J. Shi, the University of Michigan, shihang@umich.edu, 734-763-5321(O)
47
J. Shi, the University of Michigan, shihang@umich.edu, 734-763-5321(O)
48
Example 1: Special-purpose circuit boards are produced in
lots of size N = 20. The boards are accepted in a sample of n =
3 if all are conforming. The entire sample is drawn from the lot
at one time and tested. If the lot contains D=3 nonconforming
boards, what is the probability of acceptance?
Hypergeometric Distribution
•
Suppose that there is a FINITE population consisting of N items. Some
number , say D (D≤N), of these items fall into a class of interest. A random
sample of n items is selected from the population without replacement, and
the number of items in the sample that fall into the class of interest, say x,
is observed. Then x is a Hypergeometric random variable with the
probability distribution:
⎛ D ⎞⎛ N − D ⎞
⎜⎜ ⎟⎟⎜⎜
⎟
x n − x ⎟⎠
p( x ) = ⎝ ⎠⎝
x=0, 1,…,min(n,D)
⎛ N⎞
⎜⎜ ⎟⎟
n
⎝ ⎠
nD
nD ⎛ D ⎞⎛ N − n ⎞
µ=
σ2 =
⎟
⎜1 − ⎟⎜
N
N ⎝ N ⎠⎝ N − 1 ⎠
•
•
⎛a⎞
a!
⎜⎜ ⎟⎟ =
⎝ b ⎠ b! ( a − b)!
Used as a model when selecting a random sample of n items without
replacement from a lot of N items of which D are noncomforming or
defective
Excel function: HYPGEOMDIST(x,n,D,N)
J. Shi, the University of Michigan, shihang@umich.edu, 734-763-5321(O)
49
J. Shi, the University of Michigan, shihang@umich.edu, 734-763-5321(O)
50
Binomial Distribution
Example 2: (Textbook Problem 2-28) A lot of size N = 30
contains five nonconforming units. What is the probability that
a sample of five units selected at random contains exactly one
nonconforming units? What is the probability that it contains
one or more nonconformances?
Bernoulli trials: A sequence of n independent trials, where the outcome of each trial
is either a “success” or a “failure”
Binomial Distribution: If the probability of a success on any trial is a constant, p, the
number of "success" x in n Bernoulli trials has the Binomial distribution
⎛n ⎞ x
n–x
p(x) = ⎜x⎟ p (1 – p)
⎝ ⎠
E(x) = np
x = 0,1,2,...,n
V(x) = np(1 – p)
0 ≤p≤ 1
[Note: V(x) < E(x)]
Assumption:
(1) Constant probability of success p; (2) Two mutually exclusive outcomes; (3) All trials
statistically independent; (4) Number of trials n is known and constant
Application: used as a model when sampling from an infinitely large population. The
constant p represents the fraction of defective or nonconforming items in the population
Excel Function: BINOMDIST(x,n,p,false) (True:accumulative probability)
J. Shi, the University of Michigan, shihang@umich.edu, 734-763-5321(O)
51
J. Shi, the University of Michigan, shihang@umich.edu, 734-763-5321(O)
52
Example 1: Sixty percent of pulleys are produced using Lathe
#1, 40% are produced using Lathe #2. What is the probability
that exactly three out of a random sample of four production
parts will come from Lathe #1 ?
Estimation of Binomial Distribution Parameter
•
p̂ is the ratio of the observed number of defective or
nonconforming items in a sample x to the sample size n
Ans:
x
p̂ =
n
•
the probability distribution of p̂ is obtained from the binomial
[ na ]
⎛n⎞
x
P{p̂ ≤ a} = P{ ≤ a} = P{x ≤ na} = ∑ ⎜⎜ ⎟⎟p x (1 − p) n − x
n
x =0 ⎝ x ⎠
−
p
(
1
p
)
µ p̂ = p
σ 2p̂ =
n
J. Shi, the University of Michigan, shihang@umich.edu, 734-763-5321(O)
53
54
Example 3: A firm claims that 99% of their products meet
specifications. To support this claim, an inspector draws a
random sample of 20 items and ships the lot if the entire
sample is in conformance. Find the probability of committing
both of the following errors:
(1) Refusing to ship a lot even though 99% of the items are in
conformance.(False alarm)
(2) Shipping a lot even though only 95% of the items are
conforming.
(Miss detection)
Example 2: (Textbook problem 2-23)
A production process operates with 2% nonconforming
output. Every hour a sample of 50 units of product is taken,
and the number of nonconforming units counted. If one or
more nonconforming units are found, the process is stopped
and the quality control technician must search for the cause of
nonconforming production. Evaluate this decision rule.
J. Shi, the University of Michigan, shihang@umich.edu, 734-763-5321(O)
J. Shi, the University of Michigan, shihang@umich.edu, 734-763-5321(O)
55
J. Shi, the University of Michigan, shihang@umich.edu, 734-763-5321(O)
56
Example 4: (Textbook problem 2-25) A random sample of 100 units is
drawn from a production process every half hour. The fraction of
nonconforming product manufactured is 0.03. What is the probability
that p̂ ≤= 0.04 if the fraction nonconforming really is 0.03?
Poisson Distribution
The number of random events occurring during a specified time period:
p(x) =
E(x) = λ
.9
–λ x
e λ
x!
V(x) = λ
x = 0, 1, 2,...
β 1β 1= =
11
λλ
1
β =3+
2
λ
Uses:
a. number of "defects" per unit
b. number of "defects" per unit of area
c. number of random occurrences per unit of time
d. approximate
binomial
with
→∞
if
n the
; p → 0distribution
, np = cons
tanλ=
t np when np Š 5 and p Š .1 or
then
Binomial → Poisson
Assumptions: 1. The average occurrence rate (λ) is known and constant.
2. Occurences are equally likely to occur during any time interval.
3. Occurences are statistically independent.
Excel Function: POISSON(x,λ, false) (True:accumulative probability)
J. Shi, the University of Michigan, shihang@umich.edu, 734-763-5321(O)
57
Example 1: Arrivals of parts at a repair station are Poisson
distributed, with a mean rate of 1.2 per day. What is the probability
of no repairs in the next day?
J. Shi, the University of Michigan, shihang@umich.edu, 734-763-5321(O)
J. Shi, the University of Michigan, shihang@umich.edu, 734-763-5321(O)
58
Example 2: What is the probability that today the number of parts
requiring repair will exceed the average by more than one standard
deviation?
59
J. Shi, the University of Michigan, shihang@umich.edu, 734-763-5321(O)
60
Example 3: Glass bottles are formed by pouring molten glass into a
mold. The molten glass is prepared in a furnace lined with firebrick.
As the firebrick wears, small pieces of brick are mixed into the molten
glass and finally appear as defects (called "stones") in the bottle. If
we can assume that stones occur randomly at the rate of 0.00001 per
bottle, what is the probability that a bottle selected at random will
contain at least one such defect?
Example 4: The billing department of a major credit card company
attempts to control errors (clerical, keypunch, etc.) on customers'
bills. Suppose that errors occur according to a Poisson distribution
with parameter λ = 0.01. What is the probability that a customer's bill
selected at random will contain one error?
J. Shi, the University of Michigan, shihang@umich.edu, 734-763-5321(O)
61
Normal Distribution
f(x) =
1
2πσ2
–(x–µ)2/2σ2
e
E(x) = µ
β1 = 0
x ~ N(µ, σ 2 ) ;
Pr{x ≤ a} = Pr{z ≤
f(x)
σ2
V(x) = σ
β2 = 3
µ
z ~ N(0,1)
a −µ
a −µ
} = Φ(
)
σ
σ
62
Example 1: The tensile strength of a metal part is normally
distributed with mean 40 LB. and standard deviation 8 LB. If 50,000
parts are produced, approximately how many would fail to meet a
minimum specification limit of 34-LB tensile strength? Approximately
how many would have a tensile strength in excess of 48 LB?
–∞ ≤ x ≤ ∞
2
J. Shi, the University of Michigan, shihang@umich.edu, 734-763-5321(O)
x
Pr(µ−σ≤x≤µ+σ)=68.26%
Pr(µ−2σ≤x≤µ+2σ)=95.46%
Pr(µ−3σ≤x≤µ+3σ)=99.73%
If x1, x2 are independently normally distributed variables, then y=x1+x2
also follows the normal distribution, i.e. y~N(µ1+µ2,σ12+ σ22)
The Center Limit Theorem: if x1, x2, …, xn are independent random variables, with
mean µi and variance σi2, and if y=x1+x2+…+xn, then the distribution
approaches the N(0,1) distribution as n approaches infinite.
(y −
Excel Function: NORMDIST(x,µ,σ,true)
J. Shi, the University of Michigan, shihang@umich.edu, 734-763-5321(O)
n
n
∑µ ) / ∑σ
i =1
i
i =1
2
i
63
J. Shi, the University of Michigan, shihang@umich.edu, 734-763-5321(O)
64
Example 3: A quality characteristic of a product is normally
distributed with mean µ and standard deviation one. Specifications
on the characteristic are 6 < x < 8. A unit that falls within
specifications on this quality characteristic results in a profit of C0.
However, if x < 6, the profit is –C1, while if x > 8, the profit is –C2.
Find the value of µ that maximizes the expected profit.
Example 2: Three shafts are made and assembled in a linkage. The length
of each shaft, in centimeters, is distributed as follows:
Shaft 1: N ~ (75, 0.09)
Shaft 2: N ~ (60, 0.16)
Shaft 3: N ~ (25, 0.25)
(a) What is the distribution of the linkage?
(b) What is the probability that the linkage will be longer than 160.5 cm?
J. Shi, the University of Michigan, shihang@umich.edu, 734-763-5321(O)
65
y>0
E(x) = ν
•
V(x) = 2ν
ν
ν
ν
Γ(2 ) = (2 – 1) (2 – 2)... 3 • 2 • 1
5 3
ν
ν
π
= ( – 1) ( – 2)... • •
2
2
2 2
2
66
Student t Distribution (with degrees of freedom ν)
Chi–Squared Distribution (with degrees of freedom ν)
2
1
f ( y) = n / 2
y ( n / 2 ) −1e − y / 2
2 Γ ( n / 2)
J. Shi, the University of Michigan, shihang@umich.edu, 734-763-5321(O)
for ν even
for ν odd
f(x ) =
E (x ) = 0
1
πν
– (ν + 1 )
⎡ν + 1 ⎤
Γ⎢ 2 ⎥ ⎛
2
x 2 ⎞⎟
⎣
⎦ ⎜
1 +
ν ⎠
⎡ν ⎤ ⎝
Γ ⎢2 ⎥
⎣ ⎦
ν
β1 = 0
V (x ) =
ν – 2
6
β2 = 3 + n – 4
β 1=8/ν, β 2=3+12//ν,
fo r n > 4
N o te : A s n → ∞ th e d is trib u tio n o f x (d is trib u te d a s a S tu d e n t t
ra n d o m v a ria b le ) a p p ro a c h e s th a t o f a s ta n d a rd n o rm a l ra n d o m
v a ria b le .
The Chi-squared Distribution is associated with squared normal
random variables.
ν
ν
ν
Γ ( 2 ) = ( 2 – 1 ) ( 2 – 2 )... 3 • 2 • 1
y = x12 + x 22 + + x 2n
Y follows χ 2n−1 If x1, x2, …, xn are normally
5
3
ν
ν
π
= ( – 1 ) ( – 2 )...
•
•
2
2
2
2
2
fo r ν e v e n
fo r ν o d d
and independently distributed random variables
•
Application: If x and y are independent standard normal and chi-square
random variable respectively, then t = x
is distributed as t with k
degrees of freedom.
y/k
The most popular use of this distribution is for testing hypotheses
about variances of samples from normal distributions.
J. Shi, the University of Michigan, shihang@umich.edu, 734-763-5321(O)
67
J. Shi, the University of Michigan, shihang@umich.edu, 734-763-5321(O)
68
Example 1: (Textbook Problem 2-27) An electronic component for a laser rangefinder is produced in lots of size N = 25. An acceptance testing procedure is used
by the purchaser to protect against lots that contain too many nonconforming
components. The procedure consists of selecting five components at random from
the lot (without replacement) and testing them. If none of the components is
nonconforming, the lot is accepted.
INTERRELATIONSHIPS BETWEEN DISTRIBUTIONS
Hypergeometric, Binomial, Poisson, Normal
Sampling without
replacement
in finite population
Hypergeometric
finite population
if n/N≤0.1
N: population size
n:sample size
a. If the lot contains three nonconforming components, what is the probability of
lot acceptance?
p=D/N, n
The sum of a sequence of
n Bernoulli trials in
infinite population with
probability of success p
Number of defects
per unit
Binomial
if larger n, smaller p <0.1
λ=np constant
Poisson
if λ ≥15
µ= λ, σ2= λ
Normal
b. Calculate the desired probability in (a) using the binomial approximation. Is this
approximation satisfactory'? Why or why not?
If np>10 and p ≥0.5
µ=np, σ2=np(1-p)
c. Suppose the lot size was N=150. Would the binomial approximation be
satisfactory in this case?
⎛ a + 0.5 − np ⎞
⎛
⎞
⎟ − Φ ⎜ a − 0.5 − np ⎟
Pr( x = a ) ≈ Φ ⎜
⎜ np (1 − p ) ⎟
⎜ np (1 − p ) ⎟
⎝
⎠
⎝
⎠
⎞
⎛
⎛ b + 0.5 − np ⎞
⎟ − Φ ⎜ a − 0.5 − np ⎟
Pr( a ≤ x ≤ b ) ≈ Φ ⎜
⎜ np (1 − p ) ⎟
⎜ np (1 − p ) ⎟
⎠
⎝
⎠
⎝
⎛
Pr( µ ≤ pˆ ≤ ν ) ≈ Φ ⎜
⎜
⎝
⎛
⎞
ν− p
⎟ − Φ⎜
⎜
p (1 − p ) / n ⎟⎠
⎝
⎞
µ− p
⎟
p (1 − p ) / n ⎟⎠
J. Shi, the University of Michigan, shihang@umich.edu, 734-763-5321(O)
69
Example 2: A textbook has 500 pages on which typographical errors
could occur. Suppose that there are exactly 10 such errors randomly
located on those pages. Find the probability that a random selection
of 50 pages will contain no errors. Find the probability that 50
randomly selected pages will contain at least two errors.
J. Shi, the University of Michigan, shihang@umich.edu, 734-763-5321(O)
d. Suppose that the purchaser will reject the lot with the decision rule of finding
one or more nonconforming components in a sample of size n, and wants the lot to
be rejected with probability at least O.95 if the lot contains five or more
nonconforming components. How large should the sample size n be?
J. Shi, the University of Michigan, shihang@umich.edu, 734-763-5321(O)
70
Example 3: A sample of 100 units is selected from a production
process that is 2% nonconforming. What is the probability that p̂
will exceed the true fraction nonconforming by k standard deviations,
where k = 1, 2, and 3?
71
J. Shi, the University of Michigan, shihang@umich.edu, 734-763-5321(O)
72
Chapter 3 Inference About Process Quality
- Statistics Review
Interrelations Normal, Chi-Squared, Student t, F
1.
N(0,1)
= t(ν)
χ 2(ν)/ν
• Motivation
• Estimation
– point estimation
– interval estimation
• Hypothesis Testing
– Definition
– Testing on means
2
2. χ (ν) / ν = F(ν,∞)
1
3. F(α,ν1,ν2) =
F(1-α,ν2,ν1)
4.
χ 2(α,ν) = ν F(α,ν,∞)
5. t(α/2, ν) = F(α,1,ν) 1/2
• known and Unknown variance
– Testing on Variance
6. t(∞) = N(0,1)
J. Shi, the University of Michigan, shihang@umich.edu, 734-763-5321(O)
73
J. Shi, the University of Michigan, shihang@umich.edu, 734-763-5321(O)
74
Random Samples
The need of “Statistical Inference”
• Random Sample:
– Sampling from an infinite population or finite
population with replacement: A sample is selected
so that the observations are independently and
identically distributed.
– Sampling n samples from a finite population of N
⎛N ⎞
items without replacement if each of the ⎜⎜⎝ n ⎟⎟⎠
possible samples has an equal probability of being
chosen
• The parameters of a probability distribution are
unknown.
– Estimation of Process Parameters
• The parameters of a process can be time
varying, how do we identify a process change?
– Hypothesis Testing
J. Shi, the University of Michigan, shihang@umich.edu, 734-763-5321(O)
75
J. Shi, the University of Michigan, shihang@umich.edu, 734-763-5321(O)
76
METHODS FOR ESTIMATION
1. METHOD OF MOMENTS (MOM):
Terminology Definition
• Estimate: a particular numerical value of an estimator, computed
Principle:
from sample data.
if E{|x|r}<∝, then sample rth moment converges with
probability 1 to the population rth moment when sample size
is larger enough.
– Point estimator: a statistic that produces a single numerical
value as the estimate of the unknown parameter
– Interval estimator: a random interval (or called confidence
Analysis procedures:
interval) in which the true value of the parameter falls with some
level of probability.
• If p.d.f has k unknown parameters, equating the first k
population moments to the first k sample moments.
• Solve k parameters from these simultaneous equations
• Statistic:
– any function of the sample data that does not contain unknown
parameters.
Property:
• Simple to generate but may not have desired
properties
• Sampling distribution:
– The probability distribution of a statistic.
J. Shi, the University of Michigan, shihang@umich.edu, 734-763-5321(O)
77
Example:
Exponential: f(x) = λ
a.) Given x 1 , x 2 , ..., x n from f(x) define
n
f(x i)
or L* = ln(L)
L=
,x≥0, λ>0
∏
i=1
1
Population Mean (First Moment): E(x) =
λ
Sample Mean: −
x
Estimate:
Poisson:
b.) Maximize L or L* usually by setting
dL*
d(parameter of interest) = 0
and
c.) Solve system of simultaneous equations.
1
λ̂ =
−
x
E(x)=λ, thus,
78
METHODS FOR ESTIMATION
2. Method of Maximum Likelihood Estimation(MLE)
METHOD OF MOMENTS (MOM): Example
e –λx
J. Shi, the University of Michigan, shihang@umich.edu, 734-763-5321(O)
Usually preferred to MOM since the MLE's are
1.
2.
3.
4.
λ̂ = x
J. Shi, the University of Michigan, shihang@umich.edu, 734-763-5321(O)
79
Consistent
Asymptotically Normal
Asymptotically Efficient
May not be unbiased.
J. Shi, the University of Michigan, shihang@umich.edu, 734-763-5321(O)
80
Assessment of Estimation
METHOD OF MLE: Example
A. PROPERTIES
∧
1. U N BIAS ED: An estimate θ of parameter θ is unbiased if
∧
E( θ ) = θ
∧
2. CON S IS TEN T: An estimate θ of parameter θ is consistent if
∧
2
E( θ – θ ) → 0 as n → ∞
∧
∧
3. EFFICIEN T: θ is more efficient than θ if it has a minimum variance
1
2
∧
∧
2
2
E( θ – θ ) < E( θ – θ )
1
1
2
2
–λx
Exponential: Suppose f(x) = λ e
,x≥0, λ>0
n
–λxi = n e –λΣxi
L=
λe
λ
i
L* = ln(L) = n ln λ – λ Σxi
∏
dL *
n
=
dλ
λ
– Σx = 0
i
1
Thus the estimate λ̂ =
−
x
(same as MOM) .
J. Shi, the University of Michigan, shihang@umich.edu, 734-763-5321(O)
81
J. Shi, the University of Michigan, shihang@umich.edu, 734-763-5321(O)
METHODS FOR ESTIMATION
3. Interval Estimation
•
•
Interval Estimation
If x is a random variable with unknown mean µ and known
variance σ2, what is estimation interval for mean µ?
Estimate the interval between two statistics that include the true
value of the parameter with some probability
– Example: Pr{ L≤ µ ≤ U}=1-α
– The interval L≤ µ ≤ U is called a 100(1- α)% confidence interval (C.I.)
for the unknown mean µ
– two side C.I. (L is lower confidence limit, U is upper confidence limit)
– single side C.I.:
• lower side L≤ µ , Pr{ L≤ µ }=1-α
• upper side µ ≤ U, Pr{ µ ≤ U}=1-α
n
xi ) / n
– Select a statistic x = (∑
i =1
– The approximate distribution of x is N (µ, σ 2 / n) regardless of the
distribution of x per the central limit theorem.
– Given confidence level α, then
• 100(1-α)% two-side confidence interval on µ is:
α/2
α/2
x − Zα / 2
Analysis procedures:
x
L
U
µ
– get the samples
– compute the statistic
– determine the statistic reference distribution
– select confidence level
– find the lower and/or upper confidence limits based on the reference
distribution
J. Shi, the University of Michigan, shihang@umich.edu, 734-763-5321(O)
82
σ
σ
≤ µ ≤ x + Zα/2
n
n
where
Pr{z ≥ Z α / 2 } = α / 2
• 100(1-α)% upper confidence interval on µ is:
µ ≤ x + Zα
σ
n
• 100(1-α)% lower confidence interval on µ is:
x − Zα
83
σ
≤µ
n
J. Shi, the University of Michigan, shihang@umich.edu, 734-763-5321(O)
84
Example 2: A chemical process converts lead to gold.
However, the production varies due to the powers of
the alchemist. It is known that the process is normally
distributed, with a standard deviation of 2.5 g. How
many samples must be taken to be 90% certain that an
estimate of the mean process is within 1.5 g of the true
but unknown mean yield?
Example 1: The strength of a disposable plastic
beverage container is being investigated. The
strengths are normally distributed, with a known
standard deviation of 15 psi. A sample of 20
plastic containers has a mean strength of 246 psi.
Compute a 95% confidence interval for the
process mean.
J. Shi, the University of Michigan, shihang@umich.edu, 734-763-5321(O)
85
Interval Estimation of the Binomial
Distribution Parameter with A Larger Sample
Size
J. Shi, the University of Michigan, shihang@umich.edu, 734-763-5321(O)
86
Hypothesis Testing
^
• From the central limit theorem: p =x/n~ Normal (p, p(1-p) /n )
• Statistical hypothesis:
– a statement about the values of the parameters of a
probability distribution
• Hypothesis testing:
Example 1: (Textbook Problem 3-18) A random sample of 200
printed circuit boards contains 18 defective or nonconforming units.
Estimate the process fraction nonconforming. Construct a 90% twosided confidence interval on the true fraction nonconforming in the
production process.
– Making a hypothesis concerning what we believe to be true
and then use sampled data to test it.
• Two Hypotheses (Two Competing Propositions)
– Null Hypothesis H0: will be rejected if the sample data do not
support it.
– Alternative Hypothesis H1: a hypothesis different from the null
hypothesis
J. Shi, the University of Michigan, shihang@umich.edu, 734-763-5321(O)
87
J. Shi, the University of Michigan, shihang@umich.edu, 734-763-5321(O)
88
TESTS FOR COMPARING
ONE POPULATION MEAN WITH A
STANDARD
Hypothesis Testing Procedures
A ssu m in g K n o w n P o p u latio n V arian ce
1) State the null and alternative hypothesis,
and define the test statistic.
2) Specify the significance level α.
3) Find the distribution of the test statistic
and the rejection region of H0.
4) Collect data and calculate the test
statistic.
5) Compare the test statistic with the
rejection region.
6) Assess the risk.
J. Shi, the University of Michigan, shihang@umich.edu, 734-763-5321(O)
−
x – µ
σ/ n
H0 : µ = µ0
R ejec t H 0 : µ < µ 0
R ejec t H 0 : µ > µ 0
89
Assuming Unknown Population Variance
x − tα / 2
σ
σ
≤ µ ≤ x + Zα/2
n
n
⎪
⎪−
⎪x – µ0⎪
if ⎪
⎪ > Z (α /2 )
⎪ σ/ n ⎪
−
x – µ0
if
< -Z (α )
σ/ n
−
x – µ0
if
> Z (α )
σ/ n
J. Shi, the University of Michigan, shihang@umich.edu, 734-763-5321(O)
90
Example 3: The mean time it takes a crew to restart an aluminum
rolling mill after a failure is of interest. The crew was observed
over 25 occasions, and the results were x = 26.42 minutes and
variance S2 =12.28 minutes. If repair time is normally distributed,
find a 95% confidence interval on the true but unknown mean
repair time.
TESTS FOR COMPARING
ONE POPULATION MEAN WITH A STANDARD
−
x–µ
~ t(n-1)
s/ n
H1
R ejec t H 0 : µ ≠ µ 0
~ N (0 ,1 ) x − Z α / 2
s
s
≤ µ ≤ x + tα / 2
n
n
H1
⎪
⎪−
⎪x – µ0⎪
Reject H0: µ ≠ µ0 if ⎪
⎪ > t(α/2, n-1)
⎪ s/ n ⎪
−
x – µ0
Reject H0: µ < µ0 if
<- t(α, n-1)
s/ n
−
x – µ0
Reject H0: µ > µ0 if
> t(α, n-1)
s/ n
H0 : µ = µ0
J. Shi, the University of Michigan, shihang@umich.edu, 734-763-5321(O)
91
J. Shi, the University of Michigan, shihang@umich.edu, 734-763-5321(O)
92
Example 4: The life of a battery used in a cardiac pacemaker is
assumed to be normally distributed. A random sample of 10
batteries is subjected to an accelerated life test by running them
continuously at an elevated temperature until failure, and the
following lives are obtained.
2 5 .5 h
2 6 .1 h
2 6 .8
2 3 .2
2 4 .2
2 8 .4
2 5 .0
2 7 .8
2 7 .3
2 5 .7
TESTS FOR COMPARING TWO POPULATION MEANS
Assume Known Population Variances
_
_
x
σ1
n
1
2
-
x
+
1
2
σ2
n
2
~ N ( 0 ,1 )
_
1
H1
_
x -x
Reject H 0 : µ1 < µ 2 if
x -x
Reject H 0 : µ1 > µ 2 if
x -x
1
2
σ
σ2
+ 2
n1 n2
2
1
_
93
− Zα/2
σ1
n
2
+
σ2
1
n
2
≤ µ1 − µ 2 ≤
_
_
x -x
1
2
+ Zα/2
2
σ1
n
2
+
1
σ2
n
2
2
_
Reject H 0 : µ1 ≠ µ 2 if
> Zα / 2
_
1
2
σ
σ2
+ 2
n1 n2
2
1
_
J. Shi, the University of Michigan, shihang@umich.edu, 734-763-5321(O)
2
2
H 0 : µ1 = µ 2
Construct a 90% two-sided confidence interval on mean life in the
accelerated test.
_
x -x
< −Zα
_
1
2
σ12 σ 22
+
n1 n2
> Zα
J. Shi, the University of Michigan, shihang@umich.edu, 734-763-5321(O)
94
TESTS FOR COMPARING TWO POPULATION MEANS
Example 5: A bakery has a line making Binkies, a big-selling junk
food. Another line has just been installed, and the plant manager
wants to know if the output of the new line is greater than that of
the old line, as promised by the bakery equipment firm. 12 days of
data are selected at random from line 1 and 10 days of data are
–
selected at random from line 2, with x = 1124.3 cases and
1
–
2
x = 1138.7. It is known that σ = 52 and σ 2 = 60. Test the
2
1
2
appropriate hypotheses at α = 0.05, given that the outputs are
normally distributed.
1. Assume Unknown Population Variances
a) Assume Homogeneity ( σ
_
x -x
1
Sp
2
= σ 12 = σ 22 )
_
where S p =
2
H 0 : µ1 = µ 2
~ t (n1 + n2 − 2) ; x 1 - x 2 − t α / 2 , n + n − 2 S p
_
2
1 1
+
n1 n2
_
1
2
1
n
+
1
1
n
≤ µ1 − µ 2 ≤
2
_
_
x -x
1
2
+ t α / 2 , n1 + n 2 − 2 S p
1
n
+
1
1
n
(n − 1) s 2 + (n − 1) s 2
1
2
1
2
n1 + n2 − 2
H1
Reject H 0 : µ1 ≠ µ 2 if
_
_
x -x
1
_
Reject H 0 : µ1 < µ 2 if
2
1 1
+
n1 n2
Sp
_
x -x
1
2
1 1
+
n1 n2
Sp
> t (α / 2, n1 + n2 − 2)
_
< −t (α, n1 + n2 − 2)
_
x -x
2
> t (α, n1 + n2 − 2)
1 1
Sp
+
n1shihang@umich.edu,
n2
J. Shi, the University of Michigan,
734-763-5321(O)
1
Reject H 0 : µ1 > µ 2 if
J. Shi, the University of Michigan, shihang@umich.edu, 734-763-5321(O)
95
96
2
TESTS FOR COMPARING TWO POPULATION MEANS
Textbook problem: 3-11. Two quality-control technicians measured the
surface finish of a metal part, obtaining the data shown below. Assume that
the measurements are normally distributed.
Technician 1
Technician 2
1.45
1.54
1.37
1.41
1.21
1.56
1.54
1.37
1.48
1.20
1.29
1.31
1.34
1.27
1.35
Assuming that the variances are equal, construct a 95% confidence interval
on the mean difference in surface-finish measurements.
2. Assume Unknown Population Variances
b) Assume Heterogeneity ( σ
_
2
1
≠σ
_
x1 - x 2
2
1
2
2
s
s
+
n1 n2
H 0 : µ1 = µ 2
2
2)
2
(s / n + s / n )
(s / n ) (s / n )
~ t (v) where v =
2
1
1
2
1
1
n1 + 1
H1
_
2
2
2
2
2
+
2
−2
2
2
n2 + 1
_
Reject H 0 : µ1 ≠ µ 2 if
x -x
Reject H 0 : µ1 < µ 2 if
x -x
Reject H 0 : µ1 > µ 2 if
x -x
1
2
2
1
s
s2
+ 2
n1 n2
_
> t (α / 2, v)
_
1
2
2
1
s
s2
+ 2
n1 n2
_
< −t (α, v)
_
1
2
s12 s22
+
n1 n2
> t (α, v )
J. Shi, the University of Michigan, shihang@umich.edu, 734-763-5321(O)
97
J. Shi, the University of Michigan, shihang@umich.edu, 734-763-5321(O)
98
TESTS FOR COMPARING ONE "NORMAL"
POPULATION VARIANCE WITH A STANDARD
(n −1)s2
2
~ χ (n – 1)
σ2
t α,ν
χ 12− α / 2 , n −1 ≤
( n − 1)S 2
≤ χ α2 / 2 , n −1
σ2
2
2
H 0 : σ = σ 0 H1
(n - 1) s
(n - 1) s
2
2
Reject H : σ ≠ σ if
2 > χ (α/2,n - 1) or
2 < χ (1 - α/2,n - 1)
0
o
σo
σo
2
(n - 1) s
2
2 < χ (1-α,n - 1)
σo
2
(n - 1) s
2
Reject H : σ > σ if
> χ (α,n - 1)
2
o
0
σo
Reject H : σ < σ if
0
o
( n − 1) S 2
( n − 1) S 2
≤ σ2 ≤ 2
,
2
χ α / 2 , n −1
χ 1 − α / 2 , n −1
J. Shi, the University of Michigan, shihang@umich.edu, 734-763-5321(O)
99
Pr{ χ 2n −1 ≥ χ α2 / 2 , n −1 } = α / 2
J. Shi, the University of Michigan, shihang@umich.edu, 734-763-5321(O)
100
TESTS FOR COMPARING TWO NORMAL
POPULATION VARIANCES
Consider the data in Exercise 3-3. Construct a 90% two-sided
confidence interval on the variance of battery life. Convert this into
a corresponding confidence interval on the standard deviation of
battery life.
2 5 .5 h
2 6 .1 h
2 6 .8
2 3 .2
2 4 .2
2 8 .4
2 5 .0
2 7 .8
2 7 .3
2 5 .7
S 12 / σ 12
2
2
~ Fn1 −1, n 2 −1 W ith H 0 : σ 1 = σ 2
S 22 / σ 22
2
2
for H 1 : σ 1 ≠ σ 2
Reject H 0
if
s 2
1
s 2
2
s 2
1
s 2
2
> F (α/2,n –1,n –1) or
1
2
< F (1–α/2,n –1,n –1)
1
2
2
2
for H 1 : σ 1 < σ 2
Reject H
0
if
s2
s1
2
2
> F
(α,n 2 –1,n 1 –1)
2
2
for H : σ > σ
1
1
2
s
Reject H
J. Shi, the University of Michigan, shihang@umich.edu, 734-763-5321(O)
101
0
if
s
2
1
2
> F
2
(α,n 1 –1,n 2 –1)
S 12
σ2 S 2
F1− α / 2 , n 2 −1, n1 −1 ≤ 12 ≤ 12 Fα / 2 , n 2 −1, n1 −1 ,
S 22
σ2 S2
F1− α / 2 , µ , ν = 1 / Fα / 2 , ν ,µ
J. Shi, the University of Michigan, shihang@umich.edu, 734-763-5321(O)
102
The Use of P-Values in Hypothesis Testing
(Textbook Problem 3-11 - AGAIN) Two quality-control
technicians measured the surface finish of a metal part, obtaining
the data shown below. Assume that the measurements are normally
distributed.
1. Traditional hypothesis testing:
– Given α to determine whether the null hypothesis was rejected
– Disadvantage:
b. Construct a 95% confidence interval estimate of the ratio of the variances of
technician measurement error.
• No information on how close to/far away from the rejection region
• predefined α may not reflect different decision maker’s risk assessments
c. Construct a 95% confidence interval on the variance of measurement error for
Technician 2.
2. P-Value approach
– P-Value: the smallest level of significance would lead to rejection of the
null hypothesis
– if the predefined α>P= αmin, reject the null hypothesis
x1 = 1.3829, S1 = .11485 , n1 = 7
Ans:
x2 = 1.3763, S2 = .1249, n2 = 8
S
2
p
f(x)
6 (.11485 ) 2 + 7 (.1249) 2
=
= .0145
13
Φ(Z0)
1-Φ(Z0)
Z0<0
J. Shi, the University of Michigan, shihang@umich.edu, 734-763-5321(O)
103
µ=0
x
Z0>0
J. Shi, the University of Michigan, shihang@umich.edu, 734-763-5321(O)
104
Φ(z) = 1 − α / 2
Φ(z) = 1 − α
two size C.I.
one side
C.I.
(90%)
(95%)
Use of P Value for the Normal Distribution
H0: µ=µ0 , standard statistic Z0~N(0,1)
– P=2[1-Φ|Z0|] for two- tailed test with H1: µ≠µ0
– P=1-Φ(Z0) for an upper-tailed test with H1: µ>µ0
– P=Φ(Z0) for an lower-tailed test with H1: µ<µ0
– e.g. Textbook Page 100, P=1-Φ(Z0)=0.00023,
If α>P then rejected.
If α=0.01 rejected; however, If α=0.00001, not rejected.
f(x)
Φ(Z0)
1-Φ(Z0)
Z0<0
x
µ=0
Z0>0
J. Shi, the University of Michigan, shihang@umich.edu, 734-763-5321(O)
105
J. Shi, the University of Michigan, shihang@umich.edu, 734-763-5321(O)
106
Testing on Binomial Parameters
Test on Poisson Distribution
•
•
To test whether the parameter p of a binomial distribution equals a
standard value p0
The test is based on the normal approximation to the binomial distribution
H 0 : p = p0
H 1 : p ≠ p0
⎧ ( x + 0.5) − np0
⎪ np (1 − p )
⎪
0
0
Z0 = ⎨
( x − 0.5) − np0
⎪
⎪⎩ np0 (1 − p0 )
if
x < np0
if
x > np0
Or using the central limit theorem
H 0 : p1 = p2
H1 : p1 ≠ p2
•
Z0 =
pˆ 1 − pˆ 2
;
1 1
pˆ (1 − pˆ )( + )
n1 n2
pˆ =
•
A random sample of n observation is taken, say x1, x2, ..,xn. Each
{xi} is Poisson distributed with parameter λ. Then the sum x= x1+ x2
+...+xn is Poisson distributed with parameter nλ.
Example 3-9 show how to use Poisson distribution to do hypothesis
test directly
•
If n is large, x =x/n is approximately normal with mean λ and
variance λ/n
x − λ0
Z0 =
Test hypothesis
λ0 / n
H0: λ =λ0
H1: λ ≠λ0
The null hypothesis would be rejected if |Z0|>Zα/2.
H0 is rejected if | Z 0 |> Z α / 2
Z0 =
x − p0
p0 (1 − p0 ) / n
n1 pˆ 1 + n2 pˆ 2
if
n1 + n2
•
p1 = p2
•
The null hypothesis is rejected if |z0|>Zα/2
J. Shi, the
University of 3-7,
Michigan,
shihang@umich.edu, 734-763-5321(O)
Example
p108
107
J. Shi, the University of Michigan, shihang@umich.edu, 734-763-5321(O)
108
The Probability of Type II Error
— Detection of a mean shift
Two Types of Hypothesis Test Errors
•
Type I error ( producer’s risk):
– α = P{type I error} = P{reject H0 |H0 is true}
=P{product is rejected| but product is good}
•
Type II error (consumer’s risk):
– β = P{type II error} = P{fail to reject H0 |H0 is false}
=P{product is not rejected|although product is bad}
•
•
β = Pr{H 0 | H1}
= Pr{µ 0 − Zα / 2 σ / n ≤ x ≤ µ 0 + Z α / 2 σ / n | H1}
= Φ ( Zα / 2 −
Power of the test:
– Power = 1- β = P{reject H0 |H0 is false}
J. Shi, the University of Michigan, shihang@umich.edu, 734-763-5321(O)
Type II error= β=Pr{H0 |H1 |}=Pr{within the control limits|has a mean shift}
H0: µ = µ0
µ1 = µ 0 + δ, if
δ>0
H1: µ = µ1≠ µ0 with known σ2
δ n
δ n
) − Φ(− Zα / 2 −
)
σ
σ
OC curve see Fig. 3-7 P109
• The larger the mean shift, the smaller the type II error
• The larger the sample size, the smaller the type II error
109
J. Shi, the University of Michigan, shihang@umich.edu, 734-763-5321(O)
110
Motivation
How to do?
Ch 4. Methods and Philosophy of SPC
• Distinguish two process variations:
– Chance causes and assignable causes
• Decide the status of a process
– in control
– out of control
• Continuously improve quality
• Chance Causes and Assignable Causes
of Variations
• Statistical Basis of Control Charts
• Implementation of SPC and Examples
J. Shi, the University of Michigan, shihang@umich.edu, 734-763-5321(O)
111
J. Shi, the University of Michigan, shihang@umich.edu, 734-763-5321(O)
112
Chance and assignable causes of variation
Chance Cause & Assignable Cause
Textbook Fig. 4-1 P155
•
•
Chance causes/common causes/system faults/chronic problems
– system problems/inherent problems (natural
variation/background noise)
– “in statistical control”
Assignable causes/special causes/local causes/sporadic
problems
– problems arise in somewhat unpredictable fashion (operator
error, material defects, machine failure)
– “out of statistical control”
Textbook Fig. 4-1 P155
J. Shi, the University of Michigan, shihang@umich.edu, 734-763-5321(O)
113
Purpose of Using Control charts
- Improve Process and Reduce Process Variation
1. Most processes do not operate in a state of
statistical control.
2. Consequently, the routine and attentive use of
control charts will identify assignable causes. If
these causes can be eliminated from the process,
variability will be reduced and the process will be
improved.
3. The control chart will only detect assignable
causes. Management, operator, and engineering
action will usually be necessary to eliminate the
assignable cause.
J. Shi, the University of Michigan, shihang@umich.edu, 734-763-5321(O)
J. Shi, the University of Michigan, shihang@umich.edu, 734-763-5321(O)
114
Objectives of SPC
• To quickly detect the occurrence of
assignable causes or process shifts so that
investigations of the process and corrective
actions may be undertaken before many
nonconforming units are manufactured.
• Process Variation Reduction
115
J. Shi, the University of Michigan, shihang@umich.edu, 734-763-5321(O)
116
Continuous Improvement
Procedures of implementing SPC
–
–
–
–
–
Monitoring the process and detecting process changes
Diagnosing the assignable causes
Providing corrective actions plans
Dealing with resistance to changes/actions
Instituting controls to hold the gains
Take
Action
Process
•
Problem/
Variation
Formulate
Action
Measurement/
Observation
Find Root
Causes
Data
Analysis
Assignable Causes
"Continuous improvement" (called Kaizen by the Japanese) –
enduring efforts to act upon both chronic and sporadic problems
and to make refinements to processes.
– For sporadic problems, it means taking corrective action on
periodic problems;
– For chronic problems, it means achieving better and better
levels of performance each year (move mean to target);
– For process refinements, it means taking such action as
reducing variation around a target value.
Take
Action
Evaluation
Problem/
Variation
Process
Chances Causes
Formulate
Action
Find Root
Causes
Measurement/
Observation
Data
Analysis
Evaluation
Control mean close to the target
Reduce variation
J. Shi, the University of Michigan, shihang@umich.edu, 734-763-5321(O)
117
Assignable Causes
Chances Causes
J. Shi, the University of Michigan, shihang@umich.edu, 734-763-5321(O)
Example: Implementation of Continuous Quality
Improvement
118
Concept of Control Charts
•
•Special cause: tool broken, operator injury
•easy to fix
•manufacturer problem
•
•
•Chronic problem: design problem, degradation
•continuous improvement
Control Chart: is a graphical display of a quality characteristic that has
been measured or computed from a sample versus the sample number or
time.
Center Line – represents the average value of the quality characteristic
corresponding to the in-control state (only chance causes are present.)
Upper Control Limit (UCL), Lower Control Limit (LCL) – are chosen so that
if the process is in control, nearly all of the sample points will fall between
them.
3
UCL
2
mm
1
0
Average
-1
-2
LCL
-3
0
10
20
Time
J. Shi, the University of Michigan, shihang@umich.edu, 734-763-5321(O)
119
J. Shi, the University of Michigan, shihang@umich.edu, 734-763-5321(O)
120
General Model for a Control Chart
The Basis of Control Charts
Distribution of
sample subgroup
mean x-bar
Let w be a sample statistic that measures some quality characteristics of
interest, and suppose that the mean of w is µw and the standard deviation
of w is σw. Then the center line, the upper control limit, and the lower
control limit become
Distribution of
individual
measurements x:
3
3σ / n
2
1
mm
UCL
UCL = µw + k σw
Center line = µw
LCL = µw - k σw
2σ / n
1σ / n
0
Average
3 sigma control limits:
•
Action limits: K=3 (p=0.0027)
•
Warning limits: K=2 (p=0.0455)
-1
where k is the "distance" of the control limits from the center line,
expressed in standard deviation units
-2
LCL
-3
0
10
20
Time
Probability limits (Western Europe):
•
Action limits: 0.001 limits (p=0.002)
•
Warning limits: 0.025 limits (p=0.050)
J. Shi, the University of Michigan, shihang@umich.edu, 734-763-5321(O)
Control Charts vs. Hypothesis Test
H 0 : µ = µ0
H 1: µ≠ µ0
⎪−
⎪
⎪x – µ0⎪
if ⎪
⎪ > Z(α/2)
n
σ/
⎪
⎪
• Control Charts
• Control chart has UCL & LCL
• The process is out of control if the data beyond the control limits
•
Type I error ( producer’s risk):
– α = P{type I error} = P{reject H0 |H0 is true}
=P{conclude out of control|although the process is truly in control}
•
Type II error (consumer’s risk):
– β = P{type II error} = P{fail to reject H0 |H0 is false}
=P{conclude in control|although the process is truly out of control}
•
Power of the test:
– Power = 1- β = P{reject H0 |H0 is false}
f(x)
µ1
f(x)
α/2
α/2
α/2
LCL
µ
122
Review of Two Types of Hypothesis Test Errors
• Hypothesis Testing
• Hypothesis testing has a rejection region
• H0 is rejected if the data follow in the rejection region
Reject H0
J. Shi, the University of Michigan, shihang@umich.edu, 734-763-5321(O)
121
LCL
x
UCL
0
J. Shi, the University of Michigan, shihang@umich.edu, 734-763-5321(O)
α/2
123
x
µ0
UCL
J. Shi, the University of Michigan, shihang@umich.edu, 734-763-5321(O)
β
124
OC curve with α=0.05 (P119, Fig. 3-9)
The Probability of Type II Error
— Detection of a mean shift with a known σ
•
•
Type II error= β=Pr{H0 |H1 |}=Pr{within the control limits|has a mean shift}
H0: µ = µ0
µ1 = µ 0 + δ, if
δ>0
H1: µ = µ1≠ µ0 with known σ2
•
The larger the mean shift, the smaller the type II error
The larger the sample size, the smaller the type II error
β = Pr{H 0 | H1}
= Pr{µ 0 − Zα / 2 σ / n ≤ x ≤ µ 0 + Z α / 2 σ / n | H1}
= Φ ( Zα / 2 −
δ n
δ n
) − Φ(− Zα / 2 −
)
σ
σ
increased
δ
σ
/
d =| δ | / σ
n
J. Shi, the University of Michigan, shihang@umich.edu, 734-763-5321(O)
125
J. Shi, the University of Michigan, shihang@umich.edu, 734-763-5321(O)
126
Summary of Type I and Type II Errors
Two Types of Errors
Nature :
– Type I error:
– Concluding the process out of control when the process is
really in control
– Type II error:
– Concluding the process in control when it is really out of
control.
"In Control"
"Out of
Control"
You Conclude :
"In Control"
Confidence Consumer
Error, β
1–α
f(x)
µ1
α/2
"Out of
Control"
Producer
Error, α
Pow er
1–β
α/2
LCL
x
µ0
UCL
β
J. Shi, the University of Michigan, shihang@umich.edu, 734-763-5321(O)
127
J. Shi, the University of Michigan, shihang@umich.edu, 734-763-5321(O)
128
Average Run Length (ARL)—Out of Control
Average Run Length (ARL)— In Control
•
• If the process is actually “out-of-control”, and the probability
ARL: The average number of points that must be plotted before a
point indicates an out-of-control condition.
that the shift will be detected on
• the first sample is 1-β
• the second sample is β(1-β)
• the rth sample is βr-1(1-β)
The following table illustrates the possible sequences leading to
an "out of control" signal:
Run length
Probability
1
α
2
1
α (1– α)
ARLin −control =
α
3
α (1– α)2
:
:
:
k
α (1– α)k–1
•
•The expected number of samples taken before the shift is
detected is
∞
1
ARL out −of −control = ∑ rβ r −1 (1 − β) =
1− β
r =1
Remark: we want 1–β to be large. Thus, the "out of control"
condition can be quickly detected.
Example: ARLin-control = 1/α= 1/0.0027 = 370. Even the process is in control, an
out-of-control signal will be generated every 370 samples on the average.
J. Shi, the University of Michigan, shihang@umich.edu, 734-763-5321(O)
129
J. Shi, the University of Michigan, shihang@umich.edu, 734-763-5321(O)
Example: Suppose that a control chart with 2-sigma limits is used to
control a process. If the process remains in control, find the average
run length until a false out-of-control signal is observed. Compare
this with the in-control ARL for 3-sigma limits and discuss.
J. Shi, the University of Michigan, shihang@umich.edu, 734-763-5321(O)
130
Sample Size and Sample Frequency
- Operating-Characteristic (OC) Curve
131
•
Strategies:
– Small samples at short intervals (favorite in High volume or
more problem processes)
– larger samples at longer intervals
– Adaptive or variable sampling interval
•
An OC curve shows the relationship between a process parameter
(the mean for an X bar chart) and the probability of a type II error
•
Average run length (average time to signal=ARL*sampling
interval) is considered in design and then check the detection
power.
J. Shi, the University of Michigan, shihang@umich.edu, 734-763-5321(O)
132
Control Chart Patterns and Causes
Process Out of Control
JU MPS IN PROCES S LEVEL
1.
2.
3.
4.
5.
6.
Out of control process:
• When one or more points fall beyond the control limit
• Plotted points exhibit some nonrandom pattern of behavior
Description of nonrandom pattern
• a nonrandom pattern with a longer run up or run down, or a run of
length 8 or more
–
–
–
–
•
NEW SUPPLIER
NEW WORKER
NEW MACHINE
NEW TECHNOLOGY
CHANGE IN METHOD OR PROCESS
CHANGE IN INSPECTION DEVICE OR METHOD
HIGH PROPORTION OF POIN TS N EAR OU TER LIMITS
1.
2.
3.
4.
5.
6.
Run up: a sequence of increasing observations
Run Down: a sequence of decreasing observations
Run: a sequence of observations of the same type
Run of length: the number of samples in a run
OVER CONTROL
LARGE DIFF IN MATERIAL QUALITY, TEST METHOD
CONTROL OF 2 OR MORE PROC. ON ONE CHART
MIXTURES OF MATERIALS OF DIFFERENT QUALITY
MULTIPLE CHARTERS
IMPROPER SUBGROUPING
S TRATIFICATION (LACK OF VARIABILITY)
a periodic pattern
1. INCORRECT CALCULATION OF CONTROL LIMITS
2. SYSTEMATIC SAMPLING
J. Shi, the University of Michigan, shihang@umich.edu, 734-763-5321(O)
133
J. Shi, the University of Michigan, shihang@umich.edu, 734-763-5321(O)
SUMMARY OF OUT-OF-CONTROL CRITERIA
— Western Electric Rules (Zone Rules for Control
Control Chart Patterns and Causes
Charts)
RECURRING CYCLES
1.
2.
3.
4.
5.
6.
134
TEMPERATURE AND OTHER CYCLIC ENVIRONMENTAL EFFECTS
WORKER FATIGUE
DIFFERENCES IN MEASURING DEVICES USED IN ORDER
REGULAR ROTATION OF MACHINES OR OPERATORS
SCHEDULED PREVENTIVE MAINTENANCE (R CHART)
TOOL WEAR (R CHART)
Enhance the sensitivity of control charts for detecting a small shift
or other nonrandom patterns
1. One point plot outside 3σ limits.
2. Two successive points plot outside 2σ limits
3. Four consecutive points plot at a distance of 1σ or beyond
from the center line (one side)
4 A run of length eight points
TRENDS
1.
2.
3.
4.
GRADUAL EQUIPMENT DETERIORATION
WORKER FATIGUE
ACCUMULATION OF WASTE PRODUCTS
IMPROVEMENT OR DETERIORATION OF WORKER SKILL/EFFORT
(ESPECIALLY IN R CHART)
5. DRIFT IN INCOMING MATERIALS QUALITY
More other sensitizing rules for Shewhart control chart; Table 4-1, P176
The final type I error: the process is concluded out of control if any
one of the rules is applied
k
α = 1 − ∏ (1 − α i )
J. Shi, the University of Michigan, shihang@umich.edu, 734-763-5321(O)
135
αi is the type I error of using one rule i alone
i =1
J. Shi, the University of Michigan, shihang@umich.edu, 734-763-5321(O)
136
Rational Subgroups
•
•
•
•
Implementing SPC
- Magnificent SEVEN
Want each subgroup as homogeneous as possible
Want maximum opportunity for variation between groups.
Should be time ordered.
Should consist of items produced together for detection of a mean shift.
J. Shi, the University of Michigan, shihang@umich.edu, 734-763-5321(O)
1.
2.
3.
4.
5.
6.
7.
137
2. Check Sheet Example
J. Shi, the University of Michigan, shihang@umich.edu, 734-763-5321(O)
Histogram
Check Sheet
Pareto Chart
Cause and Effect Diagram
Defect Concentration Diagram
Scatter Diagram
Control Chart
J. Shi, the University of Michigan, shihang@umich.edu, 734-763-5321(O)
138
3. Pareto Chart Example
139
J. Shi, the University of Michigan, shihang@umich.edu, 734-763-5321(O)
140
4. Cause and Effect Diagram Example
J. Shi, the University of Michigan, shihang@umich.edu, 734-763-5321(O)
5. Defect Concentration Diagram Example
141
J. Shi, the University of Michigan, shihang@umich.edu, 734-763-5321(O)
142
6. Scatter Plot Example
CASE Example (Grant/Levenworth 1988) : Thread
grinding for fitting used in aircraft hydraulic system.
Process
• Inspection thread pitch diameter based on a given specifications
(37.5±12.5)
• Total 20hrs with each hour 5 items
Question:
• Is the process capable of producing such quality products?
• Can the process or quality be further improved?
J. Shi, the University of Michigan, shihang@umich.edu, 734-763-5321(O)
143
J. Shi, the University of Michigan, shihang@umich.edu, 734-763-5321(O)
144
Sample Thread Pitch Diameter Data
Aircraft Fittings (Thread Pitch Diameter)
PITCH DIAMETER FOR AIRCRAFT FITTINGS
5 items sampled each hour
Values in .0001 inches excess of 0.4000 in.
Upper Tolerance Limit
J. Shi, the University of Michigan, shihang@umich.edu, 734-763-5321(O)
50
40
40
Nominal Target
30
30
Lower Tolerance Limit
20
Sample Number
145
J. Shi, the University of Michigan, shihang@umich.edu, 734-763-5321(O)
146
Aircraft Fittings Range Chart
Aircraft Fittings X-Bar Chart
20
40
37.5
15
UCL 37.1262
Fitting Dimension
Fitting Dimension
25
20
20
32
30
32
35
35
33
31
36
31
41
38
40
33
33
35
33
35
30
32
36
15
33
32
30
32
37
33
32
35
24
41
34
39
26
34
34
33
33
27
27
39
10
34
34
32
33
37
31
36
36
35
36
35
39
35
37
33
33
34
29
29
35
5
35
31
30
33
34
32
33
33
36
35
38
38
40
35
37
31
30
28
36
35
50
R
4
4
2
3
5
2
5
13
19
6
4
4
14
4
7
5
5
3
9
6
6.2
0
36
31
30
32
32
32
33
23
43
36
34
36
36
36
30
28
33
27
35
33
Avg.
34.0
31.6
30.8
33.0
35.0
32.2
33.0
32.6
33.8
37.8
35.8
38.4
34.0
35.0
33.8
31.6
33.0
28.2
31.8
35.6
33.6
Thread Pitch
Sample
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
UWL 35.9341
35
MEAN 33.5500
32.5
LWL 31.1659
UCL 13.1090
UWL 10.8060
10
MEAN 6.2000
5
LCL 29.9738
30
LWL 1.5940
25
20
15
10
0
25
20
15
5
0
10
Sample Number
J. Shi, the University of Michigan, shihang@umich.edu, 734-763-5321(O)
5
0
27.5
Sample Number
147
J. Shi, the University of Michigan, shihang@umich.edu, 734-763-5321(O)
148
Summary: What can a control chart do?
Ch 5 Control Charts for Variables
•
•
•
•
•
Is a proven technique for improving productivity
Is effective in defect prevention
Prevent unnecessary process adjustment
Provide diagnostic information
Provide information about process capability
J. Shi, the University of Michigan, shihang@umich.edu, 734-763-5321(O)
•
•
•
•
149
Need for Control of Both Mean and Variability
•
Control Chart for X and R
Control Chart for X and S
Operating-Characteristic Function
Relationship of NTL, CL, and SL
J. Shi, the University of Michigan, shihang@umich.edu, 734-763-5321(O)
150
Review of the Basic Model of Control Charts
The number of nonconforming product is dependent on both
mean shift and larger variation (Textbook Fig. 5-1, P208)
Let w be a sample statistic that measures some quality characteristic of interest, and
suppose that the mean of w is µw and the standard deviation of w is σw. Then the center
line, the upper control limit, and the lower control limit become
Normal mean and variance
UCL = µw + k σw
Center line = µw
Larger mean and normal variance
LCL = µw - k σw
where k is the "distance" of the control limits from the center line, expressed in standard
deviation units
normal mean and larger variance
• Mean is monitored by X bar chart
• Variability is monitored by either S chart (standard deviation) or R chart (range)
J. Shi, the University of Michigan, shihang@umich.edu, 734-763-5321(O)
151
J. Shi, the University of Michigan, shihang@umich.edu, 734-763-5321(O)
152
Control Chart for X and R
— Known µ,σ
•
Statistical Basis of the Charts
– suppose {xij, i=1,…,m, j=1,…,n} are normally distributed with
xij,~N(µ,σ2), thus, X ~ N (µ, (σ / n ) 2 )
•
X bar chart monitors between-sample variability (variability over
time) and R chart measures within-sample variability
(instantaneous variability at a given time)
If µ and σ are known, X bar chart is
•
µ ± 3σ x ⇒ µ ± 3
Control Chart for X and R
— Known µ,σ (Cont’s)
•
•
Range Ri=max(xij)-min(xij) for j=1,..n
If µ and σ are known, the statistical basis of R charts is as follows:
– Define the relative range W=R/σ. The parameters of the
distribution of W are a function of the sample size n.
– Denote µW =E(W)=d2, σW =d3,
• (d2 and d3, are given in Table VI of Textbook on Page 761)
– µR =d2σ, σR=d3 σ, which are obtained based on R=W σ
– R chart control limits
µ R ± 3σ R ⇒ d 2 σ ± 3d 3 σ ⇒ (d 2 ± 3d 3 )σ
σ
⇒ µ ± Aσ
n
LCL = µ − Aσ
CL = µ
ULC = µ + Aσ
LCL = D1σ
3
A=
n
153
J. Shi, the University of Michigan, shihang@umich.edu, 734-763-5321(O)
Control Chart for X and R
— Unknown µ and σ
µˆ x = X =
•
∑x
i =1
•
m
i
m
=
n
∑∑ x
i =1 j=1
mn
;
σˆ =
∑R
R
; R = i =1
d2
m
i
µˆ R = R =
•
σˆ
R / d2
⇒ x ±3
⇒ x ± A 2R
n
n
LCL = x − A 2 R
CL = x
A2 =
ULC = x + A 2 R
J. Shi, the University of Michigan, shihang@umich.edu, 734-763-5321(O)
σ R based on R=W σ, σW =d3, σˆ = R
d2
m
X bar chart
µˆ x ± 3σˆ x ⇒ x ± 3
Need to estimate µ R ,
m
ij
154
Control Chart for X and R
— Unknown µ and σ (cont’s)
Need to estimate µ and σ
m
D 2 = d 2 + 3d 3
ULC = D 2 σ
J. Shi, the University of Michigan, shihang@umich.edu, 734-763-5321(O)
•
D1 = d 2 − 3d 3
CL = d 2 σ
∑R
i =1
m
i
;
LCL = D 3 R
CL = R
d2 n
ULC = D4 R
155
R
d2
R chart
µˆ R ± 3σˆ R ⇒ R ± 3
3
σˆ R = d 3 σˆ = d 3
d3R
d
⇒ (1 ± 3 3 )R
d2
d2
D3 = 1 −
3d 3
d2
D4 = 1 +
3d 3
d2
J. Shi, the University of Michigan, shihang@umich.edu, 734-763-5321(O)
156
Procedures for Establishment of Control Limits
— Unknown µ and σ
•
•
•
Review of Type I and Type II Error
Nature :
If µ and σ are unknown, we need to estimate µ and σ based on the
preliminary in-control data (normally m=20~25).
The control limits established using the preliminary data are
called trial control limits, which are used to check whether the
preliminary data are in control.
First check R or S chart to ensure all data in-control, and then
check X bar chart (P213, Example 5-1)
Collect
Preliminary Data
Estimate
X R or S
Establish
Control Limits
Update
Estimation
Check
Preliminary Data
In-control
Eliminate the Outliers
due to Assignable Causes
"In Control"
You Conclude :
"In Control"
Future
Monitoring
"Out of
Control"
Confidence Consumer
Error, β
1–α
Producer
Error, α
157
J. Shi, the University of Michigan, shihang@umich.edu, 734-763-5321(O)
158
Review of the ARL - “Out of Control”
Review of the ARL - “In Control”
• If the process is actually “out-of-control”, the probability that
the shift will be detected on
• the first sample is 1-β
• the second sample is β(1-β)
• the rth sample is βr-1(1-β)
The following table illustrates the possible sequences leading to an
"out of control" signal:
Run length
Probability
1
α
2
α (1– α)
3
α (1– α)2
:
:
:
k
α (1– α)k–1
• The expected number of samples taken before the shift is
detected is
∞
ARLout −of −control = ∑ rβ r −1 (1 − β) =
∞
r =1
1
= ∑ k (1 − α) k −1 α =
α
r =1
J. Shi, the University of Michigan, shihang@umich.edu, 734-763-5321(O)
Pow er
1–β
Out-of-control
J. Shi, the University of Michigan, shihang@umich.edu, 734-763-5321(O)
ARLin −control
"Out of
Control"
159
J. Shi, the University of Michigan, shihang@umich.edu, 734-763-5321(O)
1
1− β
160
OC Curve for x bar and R Chart
•
X bar chart
µ 1 = µ 0 + kσ,
UCL = µ 0 + Lσ / n ;
OC Curve for X bar and R chart (Cont’s)
LCL = µ 0 − Lσ / n ;
β = P{LCL ≤ x ≤ UCL | µ1 = µ 0 + kσ}
= Pr{x ≤ UCL | µ1} − Pr{x ≤ LCL | µ1}
[
] [
= Φ L−k n −Φ −L−k n
•
]
The expected number of samples taken before the shift is detected
∞
ARL out −of −control = ∑ rβ r −1 (1 − β ) =
r =1
1
1−β
If sample interval is very small, the small shift may still be detected reasonably fast although perhaps not on
the first sample following the shift
P236 Figure 5-16
•
If process is in control: ARL is the expected number of samples until a "false
alarm” occurs
∞
ARL in −control = ∑ k (1 − α )
i =1
k −1
P234 Figure 5-15
(α ) = 1
α
J. Shi, the University of Michigan, shihang@umich.edu, 734-763-5321(O)
161
J. Shi, the University of Michigan, shihang@umich.edu, 734-763-5321(O)
ARL for X bar
Estimation of the Process Capability
I=n*ARL
ARL
162
•
•
•
Get process specification limits (USL, LSL)
Estimate σ based on σˆ = R / d 2 (R chart) or σˆ = S / c4 (S chart)
Estimate the fraction of nonconforming products p (or p×106PPM)
LSL − x
USL − x
p̂ = Pr{ x < LSL } + Pr{ x > USL} = Φ (
) + 1 − Φ(
)
σˆ
σˆ
•
Process-Capability Ratio
USL − LSL
USL − LSL
;
PCR =
;
6σ
6σˆ
PCR=1 means the process uses up 100% tolerance band with
0.27% (2700PPM) nonconforming units
PCR =
P237 Figure 5-17
•
P238 Figure 5-18
J. Shi, the University of Michigan, shihang@umich.edu, 734-763-5321(O)
163
Percentage of the specification band that the process uses up
P=(1/PCR)100%
J. Shi, the University of Michigan, shihang@umich.edu, 734-763-5321(O)
164
Differences among NTL, CL and SL
and Impact on Process Capability
•
•
Interpretation of X bar and R Chart
T h e re is n o re la tio n s h ip b e tw e e n c o n tro l lim its a n d s p e c ific a tio n lim its .
P C R is a n in d e x re la tin g n a tu ra l to le ra n c e lim its to s p e c ific a tio n lim its .
• First check the R chart and eliminate the assignable causes
from R chart, and then check the X bar chart
• Check non-random pattern
LSL Externally
determined
LNTL
– Cyclic pattern due to temperature, regular rotation of
operators or machines, maintenance schedules, tool wear (Fig.
LSL
3σ
LCL
3σ
n
Center line
on x bar
Distribution of individual
process measurement
LNTL
3σ
µ
LNTL
3σ
LSL
µ
UNTL
USL
5-10, P230)
PCR>1, P<100%
– Mixture pattern when the plotted points tend to fall near or
slightly outside the control limits. Two overlapping
distributions are resulted from too often process adjustment
3σ
Distribution
of x bar values
µ
UNTL
3σ
3σ
(Fig 5-11, p230).
PCR=1, P=100%
– Shift in process level due to introduction of new workers,
methods, materials, or inspection standard (Fig. 5-12, P231)
– Trend pattern due to gradual tool wear (Fig. 5-13, P231)
– Stratification pattern for the points to cluster around the center
line due to incorrect calculation of Control limits or
inappropriate reasonable sampling group (Fig. 5-14, P232)
USL
UCL
UNTL
LNTL
LSL
3σ
Externally
USL
J. Shi, the University of Michigan, determined
shihang@umich.edu, 734-763-5321(O)
µ
USL
PCR<1, P>100%
UNTL
3σ
165
J. Shi, the University of Michigan, shihang@umich.edu, 734-763-5321(O)
166
Application Conditions of X bar and R chart
•
•
•
•
J. Shi, the University of Michigan, shihang@umich.edu, 734-763-5321(O)
167
Underlying distribution of the quality characteristics is normal
– X bar chart is more robust to nonnormality than R chart
– samples of 4 or 5 are sufficient to ensure reasonable
robustness to the normality assumption for X bar chart
Calculation accuracy of Type I error is dependent on the
distribution
X bar chart (n=4, 5, 6) is not effective to detect a small mean shift
(less than 1.5 σ) on the first sample following the shift
R chart is insensitive to small or moderate shifts (σ1/σ0 <2.5) for
the sample size of n=4, 5, or 6. If n>10, a s chart should be used
instead of a R chart
J. Shi, the University of Michigan, shihang@umich.edu, 734-763-5321(O)
168
Control Chart for X and S
— Known µ and σ
•
•
Control Chart for X and S
— Unknown µ and σ
If known µ and σ, X bar chart is the same as that in X and R
chart
1/ 2
S chart
Γ (n / 2)
⎛ 2 ⎞
c4 = ⎜
⎟
2
– Denote µS =E(S)=c4 σ, σ S = σ 1 − c 4
⎝ n − 1 ⎠ Γ[(n − 1 / 2)]
•
µˆ = X =
σˆ =
– control limits for S chart
•
µ S ± 3σ S ⇒ c 4 σ ± 3σ 1 − c 42 ⇒ (c 4 ± 3 1 − c 42 )σ
∑x
i =1
m
=
n
∑∑ x
i =1 j=1
n
ij
;
mn
Si =
∑ (x
j=1
ij
− xi )2
n −1
µˆ ± 3σˆ x ⇒ x ± 3
LCL = x − A 3 S
CL = x
169
S=
1 m
∑ Si
m i =1
σˆ
3 S
⇒x±
⇒ x ± A3 S
n
n c4
A3 =
ULC = x + A 3 S
J. Shi, the University of Michigan, shihang@umich.edu, 734-763-5321(O)
;
(based on µS =E(S)=c4 σ)
X bar chart
B 6 = c 4 + 3 1 − c 42
ULC = B 6 σ
i
µˆ S S
= ;
c4 c4
B 5 = c 4 − 3 1 − c 42
CL = c 4 σ
m
m
(c4 is a constant that depends on the sample size n, which,is given
in Table VI of Textbook on Page 761)
LCL = B 5 σ
Need to estimate µ and σ.
3
c4 n
J. Shi, the University of Michigan, shihang@umich.edu, 734-763-5321(O)
170
Summary of Control Charts
Control Chart for X and S
— Unknown Standard µ,σ (Cont’s)
Process Parameters
•
Need to estimate µs and σs.
1 m
µˆ S = S = ∑ Si ;
m i =1
σˆ S = σˆ 1 − c 24 =
S chart
Si =
LCL = µ − Aσ
CL = µ
ULC = µ + Aσ
known µ σ
n
•
X bar chart
∑ (x ij − x i ) 2
j=1
S
1 − c 24
c4
µˆ S ± 3σˆ S ⇒ S ± 3
R chart
S chart
LCL = D1σ
LCL = B 5 σ
CL = d 2 σ
CL = c 4 σ
ULC = D 2 σ
ULC = B 6 σ
n −1
σˆ =
S
;
c4
X bar & R chart
1 − c 24
S
1 − c 24 ⇒ (1 ± 3
)S
c4
c4
LCL = B 3 S
CL = S
ULC = B 4 S
Please review Example 5-3, p243
J. Shi, the University of Michigan, shihang@umich.edu, 734-763-5321(O)
B3 = 1 −
B4 = 1 +
µˆ = X
R
σˆ =
d2
µˆ = X
3
1 − c 42
c4
X bar & S chart
3
1 − c42
c4
171
σˆ =
S
;
c4
LCL = x − A 2 R
LCL = D 3 R
CL = x
CL = R
ULC = x + A 2 R
ULC = D4 R
LCL = x − A 3 S
LCL = B 3 S
CL = x
CL = S
ULC = x + A 3 S
ULC = B 4 S
J. Shi, the University of Michigan, shihang@umich.edu, 734-763-5321(O)
172
Textbook 5-43:A normally distributed quality characteristic is monitored through
use of an X bar and an R chart. These charts have the following parameters (n = 4):
x bar chart:
UCL = 626.0;
Center line = 620.0
LCL = 614.0
X bar and S Control Chart with Variable Sample Size
•
UCL = 18.795
Center line = 8.236
LCL = 0
Both charts exhibit control.
(a) What is the estimated standard deviation of the process?
(b) Suppose an S chart were to be substituted for the R chart. What would be the
appropriate parameters of the S chart?
(c) If specifications on the product were 610 ± 15, what would be your estimate of
the process fraction nonconfornting?
(d) What could be done to reduce this fraction nonconforming?
(e) What is the probability of detecting a shift in the process mean to 610 on the
first sample following the shift (sigma remains constant)?
(f) What is the probability of detecting the shift in part (e) by at least the third
sample after the shift occurs?
Use a weighted average approach in calculating x and S
R chart:
J. Shi, the University of Michigan, shihang@umich.edu, 734-763-5321(O)
m
x=
∑n x
i =1
m
i
∑n
i =1
i
i
⎡ m
2⎤
⎢ ∑ (n i − 1)S i ⎥
i =1
⎥
S=⎢ m
⎢
ni − m ⎥
∑
⎢⎣ i =1
⎥⎦
– A3, B3, and B4 will use the corresponding sample size of each
subgroup (Please see Example 5-4, P245; Fig. 5-20, P248)
•
173
Use an average sample size n, or use the most often sample size
if ni are not very different
J. Shi, the University of Michigan, shihang@umich.edu, 734-763-5321(O)
S Chart
J. Shi, the University of Michigan, shihang@umich.edu, 734-763-5321(O)
1/ 2
175
J. Shi, the University of Michigan, shihang@umich.edu, 734-763-5321(O)
174
are
176
Comparison of R Chart and S Chart
The relative efficiency of R to S2
•
•
n
Relative
R Chart
Efficiency
– simple for hand calculation;
2
1.000
– good for small sample size;
3
0.992
– lose information between xmin and xmax;
4
0.975
– not used for variable sample size.
5
0.955
S Chart
6
0.930
– when the sample size is large (n>10);
10
0.850
– Used for variable sample size ;
– Computation complexity can be simplified by using a
computer.
Summary of x bar, R and S chart formula (Table 5-9, Table 5-10; P260)
J. Shi, the University of Michigan, shihang@umich.edu, 734-763-5321(O)
177
J. Shi, the University of Michigan, shihang@umich.edu, 734-763-5321(O)
178
Example #3: (Problem 5-16) Control charts for X and R are maintained for an important quality
characteristic. The sample size is n = 7; X and R are computed for each sample. After 35 samples, we
have found that
35
Application Conditions of X bar and R chart
∑x
i =1
•
•
•
•
= 7805 and
35
∑R
i
= 1200
i=1
(a) Set up X and R charts using these data.
(b) Assuming that both charts exhibit control, estimate the process mean and
standard deviation.
(c) If the quality characteristic is normally distributed and if the specifications are
220 ± 35, can the process meet the specifications? Estimate the fraction
nonconforming.
Underlying distribution of the quality characteristics is normal
– X bar chart is more robust to nonnormality than R chart
– samples of 4 or 5 are sufficient to ensure reasonable
robustness to the normality assumption for X bar chart
Calculation accuracy of Type I error is dependent on the
distribution
X bar chart (n=4, 5, 6) is not effective to detect a small mean shift
(less than 1.5 σ) on the first sample following the shift
R chart is insensitive to small or moderate shifts (σ1/σ0 <2.5) for
the sample size of n=4, 5, or 6. If n>10, a s chart should be used
instead of a R chart
J. Shi, the University of Michigan, shihang@umich.edu, 734-763-5321(O)
i
(d) Assuming the variance to remain constant, state where the process mean should be located to minimize
the fraction nonconforming. What would be the value of the fraction nonconforming under these
conditions?
179
J. Shi, the University of Michigan, shihang@umich.edu, 734-763-5321(O)
180
Applications of Variables Charts
Ch6 Control Charts for Attributes
•
•
•
•
•
Ex. 5-7: Improving Suppliers' Processes
Ex. 5-8: Purchasing a Machine Tool
Ex. 5-9: Short Run Job Shop
Ex. 5-10: Nonmanufacturing Application
Ex. 5-11: Care in Selecting Rational Subgroups
•
•
•
•
This is a nice collection of “successful stories” describing how
charting can be used effectively to improve quality.
J. Shi, the University of Michigan, shihang@umich.edu, 734-763-5321(O)
181
p and np chart
c and u chart
Variable sample size
OC curve and ARL
J. Shi, the University of Michigan, shihang@umich.edu, 734-763-5321(O)
182
Review of Binomial Distribution
Terminology
•
•
•
•
Let x = # defects in a sample of size n where defects follow a
Bernoulli Process (two outcomes, p-constant, x - independent)
Nonconforming: Defective
Conforming: Nondefective
Attributes: Quality characteristics of conforming or non
conforming
The fraction nonconforming: the ratio of the number of
nonconforming items in a population to the total number of items
in that population.
⎛ n⎞
f (x) = ⎜ p x (1 − p)n − x
⎝ x⎠
E(x) = np
D # of nonconfor min g
p̂ i = i =
n
Total # of samples
J. Shi, the University of Michigan, shihang@umich.edu, 734-763-5321(O)
V(x) = np(1 − p)
183
J. Shi, the University of Michigan, shihang@umich.edu, 734-763-5321(O)
184
Review of the Basic Model of a Control Chart
Sample Estimation of p
Let pˆ =
E( pˆ ) =
V( pˆ ) =
x
n
Let w be a sample statistic that measures some quality characteristic of interest, and
suppose that the mean of w is µw and the standard deviation of w is σw. Then the center
line, the upper control limit, and the lower control limit become
UCL = µw + k σw
E(x) np
=
=p
n
n
Center line = µw
LCL = µw - k σw
1
p(1 − p)
V(x) =
n2
n
where k is the "distance" of the control limits from the center line, expressed in standard
deviation units
J. Shi, the University of Michigan, shihang@umich.edu, 734-763-5321(O)
J. Shi, the University of Michigan, shihang@umich.edu, 734-763-5321(O)
185
How to Establish a p-Chart?
Fraction Nonconforming Control Chart (p-Chart)
For np large
If p unknown, conduct a test and trial control limits with p̂ = p
⎛ p(1 − p) ⎞
⇒ pˆ ~ N ⎝ p,
⎠
n
m=20-25samples for constructing trial control limits
Binomial (n>10, p close to 0.5) ⇒ normal
Centerline
m
p=
p(1 − p )
n
UCL pˆ = p + 3
186
m
∑ D ∑ p̂
i =1
mn
E( p ) = p
i
=
i =1
i
m
= p
LCL pˆ = p − 3
p(1 − p)
n
•
If LCLp <0, set LCLp=0
Is there an assignable cause for out-of-control points or a nonrandom
pattern? If so, find the root causes and delete these points, and then
update control limits.
(Example 6-1, p. 288)
Remarks: When data points are plotted below LCL, they generally do not represent
a real improvement. Actually, they are often caused by errors in the
inspection rather than a process improvement
J. Shi, the University of Michigan, shihang@umich.edu, 734-763-5321(O)
187
J. Shi, the University of Michigan, shihang@umich.edu, 734-763-5321(O)
188
Example The following data give the number of nonconforming ROM chips in samples
of size 200. Construct a p chart for these data. Assume that any values beyond the control
limits have an assignable cause and revise the control limits as appropriate.
A P-Chart Example
Sample
1
2
3
4
5
6
7
8
9
10
11
0.4
0.35
Out-of-control point
0.3
Revised control chart after making adjustments
0.25
0.2
Nonconforming
19
7
11
29
24
24
15
25
11
10
37
Sample
12
13
14
15
16
17
18
19
20
21
22
Nonconforming
18
17
21
16
16
23
14
4
21
24
10
0.15
0.1
0.05
0
0
10
20
30
40
50
60
70
80
90
100
J. Shi, the University of Michigan, shihang@umich.edu, 734-763-5321(O)
189
J. Shi, the University of Michigan, shihang@umich.edu, 734-763-5321(O)
Example (Textbook problem 6-18) A fraction nonconforming control chart with center line
0.10, UCLp = 0.19, and LCLp = 0.01 is used to control a process.
190
Design of the Fraction Nonconforming Control
Chart (p Chart)
a. If 3-sigma limits are used, find the sample size for the control chart.
b. Use the Poisson approximation to the binomial to find the probability of type I error.
•
Three key parameters:
– the sample size; the frequency of sampling; the width of the
control limits
•
General Guidelines:
– select n so that the probability of finding at least one
nonconforming unit per sample is at least r Pr{D≥1} ≥r
c. Use the Poisson approximation to the binomial to find the probability of type II error if the
process fraction defective is actually p = 0.20.
– p small ---> n large
– Duncan approach: 50% chance of detecting a process shift,
i.e. p1=p0+δ (δ>0). P{x>UCL| p1}=0.5
− δ small⇒ n large
2
⎛L⎞
n = ⎜ ⎟ p(1 − p)
⎝δ⎠
– a positive lower control limit
n>
J. Shi, the University of Michigan, shihang@umich.edu, 734-763-5321(O)
191
1− p 2
L
p
round n to integer
J. Shi, the University of Michigan, shihang@umich.edu, 734-763-5321(O)
192
Table 6-4, P267
Variable Sample Size
P Chart Using Cricketgraph III
0.5
0.4
UCL
MEAN 0.223
LWL
LCL
0
Row Numbers
Constant width of control limits using average sample size
m
Fig 6-6 control chart w ith variable
sam ple size
UCL = 3; LCL = −3; CL = 0
LCL(stand)UCL(stand)
-3
3
-3
3
-3
3
-3
3
-3
3
-3
3
-3
3
-3
3
-3
3
-3
3
-3
3
-3
3
-3
3
-3
3
-3
3
-3
3
-3
3
-3
3
-3
3
-3
3
-3
3
-3
3
-3
3
-3
3
-3
3
standardized control chart
0.1
25
0.0
22
25
22
19
16
13
1
sample index
28
25
22
19
16
13
7
4
10
p
0.1
0.0
193
zi
0.2
0.1
Remarks: Use Approaches 1 and 3 together
(Example, Table 6-4, Figs. 6-6, 6-7, 6-8; P299-P301)
4.0
3.0
2.0
1.0
0.0
-1.0
-2.0
-3.0
-4.0
1
0.2
0.2
J. Shi, the University of Michigan, shihang@umich.edu, 734-763-5321(O)
Zi
0.81
0.12
-0.64
-0.20
-0.18
0.47
0.48
2.17
0.49
-0.94
3.06
1.08
-0.78
-1.09
-1.48
0.12
0.88
-0.26
-1.30
-0.54
-1.56
-0.54
0.14
-0.94
0.13
0.3
0.3
7
p̂ i − p
; p = p;
p(1 − p)
ni
p
Zi =
LCL (n bar) UCL(n bar)
0.007
0.185
0.007
0.185
0.007
0.185
0.007
0.185
0.007
0.185
0.007
0.185
0.007
0.185
0.007
0.185
0.007
0.185
0.007
0.185
0.007
0.185
0.007
0.185
0.007
0.185
0.007
0.185
0.007
0.185
0.007
0.185
0.007
0.185
0.007
0.185
0.007
0.185
0.007
0.185
0.007
0.185
0.007
0.185
0.007
0.185
0.007
0.185
0.007
0.185
19
– can be used to check a nonrandom pattern
– no reference to the actual process fraction defective
i
m
16
n=
Standardized Control Chart
i =1
10
•
∑n
13
– future sample size should not differ greatly
7
p(1− p)
LCLpi = p − 3
ni
UCL(ni)
0.184
0.194
0.194
0.184
0.180
0.180
0.184
0.184
0.188
0.188
0.180
0.176
0.176
0.176
0.180
0.194
0.194
0.194
0.188
0.184
0.184
0.184
0.184
0.188
0.188
10
0.1
i
p(1− p)
UCLpi = p + 3
;
ni
•
UWL
0.2
4
i =1
total # of defects
=
total # of observations
30
∑n
i
20
i =1
m
0
p=
∑D
0.3
Defects
m
4
– not appropriate for nonrandom pattern check
n(i)
D(i) pi=D(i)/n(i) sigma=sqrt(pbar*(1-pbar)/n(i)) LCL (ni)
100
12
0.120
0.029
0.007
80
8
0.100
0.033
0.000
80
6
0.075
0.033
0.000
100
9
0.090
0.029
0.007
110
10
0.091
0.028
0.011
110
12
0.109
0.028
0.011
100
11
0.110
0.029
0.007
100
16
0.160
0.029
0.007
90
10
0.111
0.031
0.003
90
6
0.067
0.031
0.003
110
20
0.182
0.028
0.011
120
15
0.125
0.027
0.015
120
9
0.075
0.027
0.015
120
8
0.067
0.027
0.015
110
6
0.055
0.028
0.011
80
8
0.100
0.033
0.000
80
10
0.125
0.033
0.000
80
7
0.088
0.033
0.000
90
5
0.056
0.031
0.003
100
8
0.080
0.029
0.007
100
5
0.050
0.029
0.007
100
8
0.080
0.029
0.007
100
10
0.100
0.029
0.007
90
6
0.067
0.031
0.003
90
9
0.100
0.031
0.003
2450 234
98 pbar= 0.096
p bar=total defective/total samples
1
Variable width of control limits
corresponding to each sample size
10
•
I
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
sum
average
index
J. Shi, the University of Michigan, shihang@umich.edu, 734-763-5321(O)
194
Example: The number of transmission cases that required deburring
in a 16-day sample of 100 each was as follows:
Day
Number Day
Number
1
5
9
4
2
4
10
6
3
3
11
15
4
2
12
4
5
6
13
5
6
3
14
7
7
9
15
3
8
6
16
6
Prepare an np chart with trial control limits. Assume that any points
plotting out of control have assignable causes, and continue to refine
the control limits until no points plot out of control.
np Control Chart
(The number of nonconforming items)
Rather than plotting the fraction nonconforming, we plot the number of
nonconforming items with an “np Chart”:
UCLX = np + 3 np(1–p)
Center line = np
LCLX = np – 3 np(1–p)
• This chart, too, can be "standardized", adjusted for unequal n , etc.
i
m
p̂ = p
P=
∑D
i =1
m
∑n
i =1
i
=
total # of defects
total # of observations
i
Example 6-2, P298
J. Shi, the University of Michigan, shihang@umich.edu, 734-763-5321(O)
195
J. Shi, the University of Michigan, shihang@umich.edu, 734-763-5321(O)
196
I
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
Di
5
4
3
2
6
3
9
6
4
6
15
4
5
7
3
6
sum
88
p bar=88/(100*16)=
0.055
np
5.500
eliminate point 11
pbar=(88-15)/(100*15) 0.048667
np
4.866667
UCL(trial)
12.34
12.34
12.34
12.34
12.34
12.34
12.34
12.34
12.34
12.34
12.34
12.34
12.34
12.34
12.34
12.34
UCL(trial)
12.34
LCL(trial)
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
LCL(trial)
-1.34
set to zero
UCL
11.32
LCL
-1.59
set to zero
np chart with trial control limits
UCL
11.32
11.32
11.32
11.32
11.32
11.32
11.32
11.32
11.32
11.32
11.32
11.32
11.32
11.32
11.32
11.32
LCL
0.00
0.00
0.00
0.00
0.00
0.00
0.00
0.00
0.00
0.00
0.00
0.00
0.00
0.00
0.00
0.00
20.0
Di
15.0
15.0
UCL(trial)
10.0
10.0
LCL(trial)
5.0
5.0
0.0
0.0
3
5
7
9
11
13
15
•
Advantage
– np chart is a scaling of the vertical axis by the constant n,
provide the same information as p chart
– np chart needs less calculation ( no need to calculate Di/ni)
– often used when n is constant and p is small
•
Limitation
– not easy for interpretation when n is varied (UCL LCL and Ctr
line all vary)
– only plot # of defects without considering sample size, hard to
take action
np chart after eliminate outliers
20.0
1
np Chart Properties
UCL
LCL
1
3 5
7
9 11 13 15
J. Shi, the University of Michigan, shihang@umich.edu, 734-763-5321(O)
197
Example #8: (Textbook Exercise 6-15) A control chart is used to control the fraction nonconforming for a plastic
part manufactured in an injection molding process. Ten subgroups yield the following data:
Sample Number
Sample Size
No. Nonconforming
1
100
10
2
100
15
3
100
31
4
100
18
5
100
26
6
100
12
7
100
25
8
100
15
9
100
8
10
100
8
a. Set up a control chart for the number nonconforming in samples of n = 100.
b. For the chart established in part (a), what is the probability of detecting a shift in the process fraction
nonconforming to 0.30 on the first sample after the shift has occurred?
J. Shi, the University of Michigan, shihang@umich.edu, 734-763-5321(O)
J. Shi, the University of Michigan, shihang@umich.edu, 734-763-5321(O)
198
OC Curve and ARL
•
Type II error for the p chart (OC curve see Fig 6-11, P307)
β = P{ pˆ < UCLp | p1} − P{ pˆ ≤ LCLp | p1} = P{D < nUCLp | p1} − P{D ≤ nLCLp | p1}
•
•
199
ARL0=ARLin-control=1/α
ARL1=ARLout-of-control=1/(1-β)
J. Shi, the University of Michigan, shihang@umich.edu, 734-763-5321(O)
200
Example (Textbook Exercise 6-20) Consider the control chart in
Exercise 6-18. Find the average run length if the process fraction
nonconforming shifts to 0.20.
Control Charts for Nonconformities (Defects)
- C and U Charts
•
Why need it?
– Control the total number of nonconformities in a sample or the
average number of nonconformities per unit
• nonconformity/defect: a specification of the quality characteristic is not
satisfied result in a defect or nonconformity, e.g.,
– weld spots on a car
– paint dent on a car body
• A unit may not be “nonconforming”, even though it has several
nonconformities. So, nonconforming ≠defects or nonconformities
•
Assumption: The occurrence of nonconformities in samples of
constant size is well modeled by the Poisson distribution.
–
J. Shi, the University of Michigan, shihang@umich.edu, 734-763-5321(O)
201
J. Shi, the University of Michigan, shihang@umich.edu, 734-763-5321(O)
Statistical Basis of Control Charts for
Nonconformities (Defects)
- c and u Charts
X = total # of defects in a sample
Assume X ~ Poisson ( E(X) = C )
For large C ⇒ X ~ N ( E(X) = C , Var(X) = C )
202
Control Charts for Nonconformities (Defects)
- c Chart
Let
•
Control limits for the c chart with a known c
LCL = c + 3 c
CL = c
X=0,1,2,...
If LCL<0, set LCL=0
UCL = c + 3 c
Further, suppose that a sample size of n inspection units
(e.g. 100 yd2 , 144 microprocessors, 1100 employees)
Note: n is not necessarily integer.
Then,
Y = average # of defects per unit in a sample = X / n
E(Y)= C/n = U
Var ( Y ) = C / n2 = U / n
•
If unknown c, c is estimated from preliminary samples of
inspection units
for constructing trial control limits
m
ĉ = c =
•
–
Note: C vs. U distinction is similar to X vs X common in "normal" analyses
• c chart: total number of defects in a sample
• u chart: average number of defects per unit in a sample size of n inspection units
J. Shi, the University of Michigan, shihang@umich.edu, 734-763-5321(O)
The number of potential location for nonconformities is the infinitely large, and
the probability of occurrence of a nonconformity at any location is small and
constant
203
∑c
i =1
m
i
=
total # of defects in all samples
number of samples
The preliminary samples are examined by the control chart using
the trial control limits for checking out-of-control points
Example 6-3, P310
J. Shi, the University of Michigan, shihang@umich.edu, 734-763-5321(O)
204
J. Shi, the University of Michigan, shihang@umich.edu, 734-763-5321(O)
205
J. Shi, the University of Michigan, shihang@umich.edu, 734-763-5321(O)
Variable Sample Size of Control Charts for
Nonconformities
Control Charts for Nonconformities Per Unit
- u Chart
•
•
•
c: total nonconformities in a sample of n inspection units (n is not
necessary be integer)
u: average # of nonconformities per inspection unit in a sample
m
c
ui = i ;
ni
u=
∑u
i =1
m
i
LCL = u − 3
•
•
If sample size varies, it is always to use a u chart rather than a
c chart
Approaches
– Control limits varies with each sample size, but the center
line is constant
LCL = u − 3
u
n
u
;
ni
UCL = u + 3
u
;
ni
CL = u
– Use a control limits
based on an average sample size
m
CL = u
UCL = u + 3
206
u
n
n=
If unknown u, u is estimated from preliminary samples of
inspection units for constructing trial control limits
∑n
i =1
i
m
– Use a standardized control chart (this is preferred option),
with UCL=3, LCL=-3, Center line=0.
• This chart can be used for pattern recognition
Example 6-4, P317
Zi =
Example 6-5, P319
J. Shi, the University of Michigan, shihang@umich.edu, 734-763-5321(O)
207
ui − u
u
ni
J. Shi, the University of Michigan, shihang@umich.edu, 734-763-5321(O)
208
Example (Textbook Exercise 6-45) Find the 3-sigma control limits
for:
a. A c chart with process average equal to four nonconformities.
b. A u chart with c = 4 and n = 4.
OC Curve and ARL for c and u Charts
•
Type II error for the c chart (OC curve see Fig 6-20, P291)
β = P{x < UCLu | u1} − P{x ≤ LCLu | u1}
= P{c < nUCLu | u1} − P{c ≤ nLCLu | u1}
•
•
ARL0=ARLin-control=1/α
ARL1=ARLout-of-control=1/(1-β)
J. Shi, the University of Michigan, shihang@umich.edu, 734-763-5321(O)
209
Following are the number of nonconformities in 20 samples of 50 letter-quality printer cases.
Develop the trial control limits for a c chart and if any values are out of control, assume that the
cause is assignable. Modify the control limits accordingly.
Sample
1
2
3
4
5
6
7
8
9
10
Nonconf.
19
21
14
23
13
21
15
24
20
19
J. Shi, the University of Michigan, shihang@umich.edu, 734-763-5321(O)
Sample
11
12
13
14
15
16
17
18
19
20
J. Shi, the University of Michigan, shihang@umich.edu, 734-763-5321(O)
210
Example (Textbook Problem 6-37 ) A paper mill uses a control chart to monitor the imperfection in
finished rolls of paper. Production output is inspected for 20 days, and the resulting data are shown below.
Use these data to set up a control chart for nonconformities per roll of paper. Does the process appear to be
in statistical control? What center line and control limits would you recommend for controlling current
production?
Nonconf.
37
16
4
28
17
29
25
15
11
19
Day
1
2
3
4
5
6
7
8
9
10
211
Rolls
Produced
18
18
24
22
22
22
20
20
20
20
Number of
Imperfections
12
14
20
18
15
12
11
15
12
10
Day
11
12
13
14
15
16
17
18
19
20
J. Shi, the University of Michigan, shihang@umich.edu, 734-763-5321(O)
Rolls
Produced
18
18
18
20
20
20
24
24
22
21
Number of
Imperfections
18
14
9
10
14
13
16
18
20
17
212
Example (Textbook Problem 6-56) A control chart is to be established on a process producing
refrigerators. The inspection unit is one refrigerator, and a control chart for nonconformities is to
be used. As preliminary data, 16 nonconformities were counted in inspecting 30 refrigerators.
a. What are the 3-sigma control limits'?
b. What is the α-risk for this control chart?
c. What is the β-risk if the average number of defects is actually 2 (i.e., if c = 2.O)?
d. Find the average run length if the average number of defects is actually 2.
Chapter 8 - CUSUM and EWMA Control Charts
• Why need them
– CUSUM chart
– EWMA chart
– Weighted/Moving Average chart
• What are they?
• How to set up the control limits?
J. Shi, the University of Michigan, shihang@umich.edu, 734-763-5321(O)
213
J. Shi, the University of Michigan, shihang@umich.edu, 734-763-5321(O)
214
What is CUSUM Control Chart?
Needs for CUSUM and EWMA Control Charts
•
The CUSUM chart is the “most powerful chart” for detecting a small
mean shift in the process, which was first proposed by Page (1954).
•
CUSUM chart: directly incorporates all the information in the
sequence of sample values by plotting the cumulative sums
(CUSUM) of deviations of the sample values from a target value
Why? ... To expedite detection of a small mean shift in the process.
•
Shewhart chart
– takes a long time to detect a small mean shift (shift<1.5σ)
i
Ci = ∑ ( x j − µ 0 )
• only uses the information about process contained in the last plotted point and
ignores any information given by the entire sequence of points
j=1
– is not suitable for the sample with a single observation
•
– x j: the average of the jth sample
– µ0: the target for the process mean
– Ci: the cumulative sum up to and including the ith sample
– n≥1: cusum could be constructed for individual observations
Shewhart chart with other supplemental sensitizing rules
– can increase detection sensitivity but reduce simplicity and ease
of interpretation of the Shewhart control chart
J. Shi, the University of Michigan, shihang@umich.edu, 734-763-5321(O)
215
J. Shi, the University of Michigan, shihang@umich.edu, 734-763-5321(O)
216
Example #1: Consider the following tension test
data. This process has a mean increase at sample
20, do you see it?
Interpretation of the CUSUM chart
i
⎤
⎡ i −1
C i = ∑ ( x j − µ 0 ) = ⎢∑ ( x j − µ 0 )⎥ + ( x i − µ 0 ) = C i −1 + ( x i − µ 0 )
j=1
j
=
1
⎦
⎣
•
•
•
µ=µ0, Ci is a random walk with mean zero
µ>µ0, Ci is an upward drift trend
µ<µ0, Ci is a downward drift trend
Remark: a trend of Ci is an indication of the process mean shift.
J. Shi, the University of Michigan, shihang@umich.edu, 734-763-5321(O)
217
J. Shi, the University of Michigan, shihang@umich.edu, 734-763-5321(O)
218
i
C i = ∑ ( X j − 10)
j= 0
The process mean in this case could be modeled as:
µ1=µ + δσ
X
UCL
µ
µ + δσ
LCL
t
J. Shi, the University of Michigan, shihang@umich.edu, 734-763-5321(O)
219
J. Shi, the University of Michigan, shihang@umich.edu, 734-763-5321(O)
220
Construct a CUSUM Control Chart
–— Tabular CUSUM
How to Construct a CUSUM Control Chart?
Ci+ = max[0, x i − (µ 0 + K ) + Ci+−1 ]
Ci− = max[0, (µ 0 − K ) − x i + Ci−−1 ]
•
C 0+ = C 0− = 0
Monitor the mean of a process :
– Tabular (algorithmic) cusum (preferable way)
– V-mask form of cusum
•
Statistic C +/ C − : one side upper/lower cusum
– C + / C −: accumulate derivations from µo that are greater than K,
•
K: reference value (allowance or slack value)
with both quantities reset to zero upon becoming negative
•
cusum can be constructed for both individual observations and
for the averages of rational subgroups.
•
For individual observation:
– chosen about halfway between the target µo and the out-of-control
value of the mean µ1 that we are interested in detecting quickly
µ1 = µ 0 ± δσ ⇒ δ =
i
x i = x i ⇒ C i = ∑ ( x j − µ 0 ) =C i −1 + ( x i − µ 0 )
•
j=1
| µ1 − µ 0 |
δσ | µ1 − µ 0 |
=
⇒K=
σ
2
2
Decision Rules:
– If either C + or C − exceeds the decision interval H (Generally H=5σ),
the process is considered to be out of control
Example 8-1, P411
J. Shi, the University of Michigan, shihang@umich.edu, 734-763-5321(O)
J. Shi, the University of Michigan, shihang@umich.edu, 734-763-5321(O)
221
222
Procedures for Construction of CUSUM
| µ −µ | δσ
•
•
| µ1 −µ0 | δσ
= = 0.5 ; H=5σ=5
2
2
+
Ci = max[0, x i − (µ 0 + K ) + Ci+−1 ]
K=
Ci− = max[0, (µ 0 − K ) − x i + Ci−−1 ]
1
0
Select K and H: K = 2 = 2 ; H=5σ
Construct one side upper and lower cusum and represented in the two
separate columns of the table (Table 8-2, P412)
– Calculate xi-(µ0+K) and µ0-K- xi
– Calculate the accumulative derivations C + and C −
– Count the number of consecutive periods that the cusum C+ or C−
have been nonzero, which are indicated by N+ and N- respectively
C 0+ = C 0− = 0
to check
J. Shi, the University of Michigan, shihang@umich.edu, 734-763-5321(O)
if
Ci+ > H
or Ci− > H
223
J. Shi, the University of Michigan, shihang@umich.edu, 734-763-5321(O)
224
Design of CUSUM Based on ARL
Interpretation of CUSUM
•
•
•
Find the data point iout at which C + or C − exceeds the decision
interval H (H=5σ)
If the out-of-control data corresponds to an assignable cause, then to
determine the location of the last in-control data
The reference value of K and the decision interval H have an effect on
ARL0 and ARL1
– k=0.5δ (K=kσ): to minimize the ARL1 value for fixed ARL0
– choose h (H=hσ): to obtain the desired in-control ARL0 performance
Tables 8-3 & 8-4, P415-416
iin=iout - N+out or iin=iout - N- out
where N+ out and N- out correspond to N+ and N- at data point iout
•
Estimate the new process mean
⎧
C+
µ + K + +i
⎪⎪ 0
N out
µˆ = ⎨
−
⎪µ 0 − K − Ci
N − out
⎩⎪
•
if
Ci+ > H
if
Ci− > H
ARL0
ARL1
Shewhart chart ARL1=43.96
Plot a CUSUM status chart for visualization (Fig. 8-3, P413)
– however, the other sensitizing rules cannot be safely used for the CUSUM chart
because C + and C − are not independent
J. Shi, the University of Michigan, shihang@umich.edu, 734-763-5321(O)
225
J. Shi, the University of Michigan, shihang@umich.edu, 734-763-5321(O)
ARL of the CUSUM Chart
•
Standardized CUSUM
Advantage of a standardized cusum:
Siegmund’s approximation for ARL
– one side ARL+ or ARL- for C + or C −
ARL+
or ARL− =
e
−2 ∆b
+ 2 ∆b − 1
;
2∆2
If ∆=0, ARL=b2
µ − µ0
∆ = δ * −k; δ* = 1
; b = h + 1.166
σ
226
•
δ*=0: ARL0 (one side)
δ*<0: ARLδ*>0: ARL+
•
does not depend on σ. So, many cusum charts can
now have the same values of k and h
naturally represent the process variability
x i − µ0
;
σ
+
Ci = max[0, y i − k + Ci+−1 ]
yi =
– total ARL
1
1
1
=
+
ARL ARL+ ARL−
Ci− = max[0, − k − y i + Ci−−1 ]
C 0+ = C 0− = 0;
Example, P417
J. Shi, the University of Michigan, shihang@umich.edu, 734-763-5321(O)
227
J. Shi, the University of Michigan, shihang@umich.edu, 734-763-5321(O)
228
Improvement of CUSUM
•
More Discussion on CUSUM
+
−
Fast initial response (FIR): set C 0 = C 0 ≠ 0
•
– If a shift occurred at the beginning, it can detect the shift more quickly
to decrease ARL1
– If in control at the beginning, cusum will quickly drop to zero, little
effect on the performance
•
•
•
Example:µ0=100, K=3, H=12, 50%headstart value C 0+ = C 0− = H / 2 = 6
µ1=105
In-control data
J. Shi, the University of Michigan, shihang@umich.edu, 734-763-5321(O)
229
J. Shi, the University of Michigan, shihang@umich.edu, 734-763-5321(O)
•
Create a new standardized quantity (Hawkins, 1981,1993), which is
sensitive to variance changes.
In-control distribution of νi is approximately N(0,1)
| y i | − 0.822
νi =
; ν i ~ N (0,1);
0.349
+
Si = max[0, ν i − k + Si+−1 ]
yi =
230
EXPONENTIALLY WEIGHTED MOVING AVERAGE
(EWMA)
CUSUM for Monitoring Process Variability
•
Rational subgroup: the cusum often work best with n=1
– if n>1, replace x i by x i , replace σ with σ x = σ / n
One side cusum in each direction can be designed differently
CUSUM chart is not as effective as the Shewhart chart in detecting
large shifts
– combined cusum-Shewhart procedure (Shewhart limits use
3.5σ) can improve the ability of detecting larger shifts, and has
only slightly decreased ARL0 (Table 8-5, P418).
•
•
x i − µ0
;
σ
To exponentially forget the past data, we want to attach more
weight to the most recent data
It is a weighted average: “a geometric series of weights”
Zi = λXi + (1 − λ)Zi−1 ; Z0 = µ0 = X
i −1
Si− = max[0, − k − ν i + Si−−1 ]
Zi = λ∑ (1 − λ) jXi− j + (1− λ)i Z0
j=0
•
Selection of h and k and the interpretation of cusum are similar to
the cusum for controlling the process mean
0<λ≤1, Z0=µ0
Assume xt are independent random variables, with E(xt)=µ0, Var(xt)=σ2
J. Shi, the University of Michigan, shihang@umich.edu, 734-763-5321(O)
231
J. Shi, the University of Michigan, shihang@umich.edu, 734-763-5321(O)
232
How to Construct a EWMA Chart?
Assume xt are independent random variables, with E(xt)=µ0, Var(xt)=σ2
⎛σ 2 ⎞⎛ λ ⎞⎛
2t⎞
Var (Zt ) = ⎜ n ⎟⎜
⎟⎝1 – (1 – λ) ⎠
⎝ ⎠⎝2–λ ⎠
As t becomes large:
⎛σ 2 ⎞⎛ λ ⎞
Var (Z ) = ⎜ n ⎟⎜
⎟
t
⎝ ⎠⎝2–λ ⎠
• Note: for λ=1 we have Shewhart Chart.
n=1
Zi = λXi + (1 − λ)Zi−1 ; Z0 = µ0 = X
(from Eq. 8-21)
λ
2t
UCL Z = µ0+ L σ
[1 − (1 − λ) ]
( 2 − λ) n
t
λ
2t
LCL Z = µ0 – L σ
[1 − (1 − λ) ]
( 2 − λ) n
t
In general,
λ
[1 − (1 − λ ) 2 t ]
UCLZ = µ0 + L σ
(2 − λ )n
t
CL=µ0
LCL
Note :
Zt
= µ0 – L σ
λ
[1 − (1 − λ ) 2 t ]
(2 − λ )n
Different from the textbook, here we use the sample
averages (n>1) rather than the individual samples (n=1)
J. Shi, the University of Michigan, shihang@umich.edu, 734-763-5321(O)
233
J. Shi, the University of Michigan, shihang@umich.edu, 734-763-5321(O)
234
Design of EWMA Control Chart
Performance of EWMA Control Chart
Selection of parameters: L and λ
– Affect the ARL performance (see Table 8-10, P431)
– Smaller λ to detect smaller shift
•
•
• recommend to use 0.05≤λ≤0.25, especially, λ=0.05, 0.10, 0.20)
– Generally L=3, but for small λ≤0.1, L=2.6~2.8
• approximately ARL0=500, ARL1=10.3 for detection of 1σ shift
•
Compared to Shewhart chart and CUSUM chart, EWMA chart is
– effective on detection of small mean shifts like CUSUM,
– less effective on larger shift detection than the Shewhart chart,
but generally superior to the CUSUM chart (particularly if
λ>0.1)
EWMA is very insensitive to the normality assumption. So, it is an
ideal control chart for individual observations.
σ
Recommendation:
To combine the Shewhart chart with the EWMA and use a wider
control limits ( L=3.25 or 3.5) for the Shewhart chart
ARL0
ARL1
J. Shi, the University of Michigan, shihang@umich.edu, 734-763-5321(O)
Shewhart chart ARL1=43.96
235
J. Shi, the University of Michigan, shihang@umich.edu, 734-763-5321(O)
236
EWMA for Monitoring Process Variability
•
•
zi = λxi +(1−λ)zi−1 = zi−1 +λ(xi −zi−1) = zi−1 +λ(xi − x̂i ) = zi−1 +λei
The exponentially weighted mean square error (EWMS)
Si = λ( x i − µ) + (1 − λ )Si −1
x i ~ N (µ, σ 2 )
For larger i and independent observation, it follows the chi-square
2
2
distribution with (2- λ)/ λ degrees of freedom and E(Si ) = σ
Construct exponentially weighted root mean square (EWRMS)
2
control chart to check data point Si in-control or not.
2
•
Extension of EWMA
2
UCL = σ 0
2
x̂i+1 = zi
x̂i = zi−1
•
χ ν ,α / 2
•
EWMA for time i is equal to the EWMA for time i-1 plus a fraction λ
of the forecast error of the mean shift at time i
More general expression is:
ν
i
zi = zi−1 +λ1ei +λ2 ∑ej +λ3∇ei
χ ν ,1−α / 2
•
LCL = σ 0
ν
To be insensitive to process mean change, it is suggested to
replace µ with zi (a prediction of xi+1)
j=1
Predication at i+1
x̂i+1 = zi
J. Shi, the University of Michigan, shihang@umich.edu, 734-763-5321(O)
ei = xi − x̂i
One time ahead predication
proportional
Integral
First differential
Remarks: Generally, zi is plotted at time period i+1 on the EWMA control chart
237
Moving Average Control Charts
J. Shi, the University of Michigan, shihang@umich.edu, 734-763-5321(O)
238
Construct Moving Average Control Charts
• The moving averatge can be written recursively as,
•
Different from EWMA, use an unweighted moving average
)/w
M = M
+ (X – X
t
t-w
t
t-1
M =( X + X
+
+...+ X
)/w
t
t
t-1 X t-2
t-w+1
•
w = window size, n = # samples in X
t
2
σ
1
Var( X i) = nw
Var (Mt ) = 2 •
w
i=t-w+1
σ
UCL
= µ + 3
M
At the beginning, if i<w
nw
t
∑
This window of size, w, incorporates some of the memory of
the past data information by dropping the oldest data and
adding the newest data
LCL
M
t
= µ - 3
σ
nw
µ0 ± 3
σ
n ⋅i
Remarks:
The window size of w and the magnitude of the shift of interest are inversely related.
J. Shi, the University of Michigan, shihang@umich.edu, 734-763-5321(O)
239
J. Shi, the University of Michigan, shihang@umich.edu, 734-763-5321(O)
240
Example 4 : Compare MA and X-bar Chart
Let w = 4, suppose process shifts from µ to µ +
n=1
µ0 ± 3
UCL
σ
n ⋅i
LCL
M
t
M
= µ + 3
= µ - 3
t
σ
n
σ
σ
Pr(detect) = Pr( X > µ +3
| µ= µ +
) = Pr (z > 2) = .0227
0
0
n
n
σ
nw
• for Shewhart Chart (this value does not change from sample to sample)
σ
Pr(detect) = Pr (M > UCL
| µ= µ +
)
t
Mt
0
n
σ
nw
• for Moving Average Chart (this value changes from sample to sample since,
σ
1
E(M )
=
{(µ +
)+ (w-1) µ} [for 1st sample]
t
w
n
σ
1
= w {2(µ +
)+ (w-2) µ}
[2nd sample]
n
σ
1
th
= w {w(µ +
)+ (w-w) µ}
[w sample]
n
J. Shi, the University of Michigan, shihang@umich.edu, 734-763-5321(O)
J. Shi, the University of Michigan, shihang@umich.edu, 734-763-5321(O)
241
242
9-1 SPC for Short and Small Production Runs
I. Why Need Short/Small Run SPC?
•
•
•
•
•
Ch 9 Other Univariate Statistical Process Monitoring
and Control Techniques
•
•
J. Shi, the University of Michigan, shihang@umich.edu, 734-763-5321(O)
243
Job shops
Batch processes
Large, unique products (e.g., Hubble Space Telescope, Space Shuttles)
Start-up processes, new machines, new production systems, new products
Flexible manufacturing, Just-In-Time inventory control systems, and numerically
controlled processes with build-to-order production schedules
Teaching/learning processes
Many non-traditional applications of SPC where the prior knowledge of the
system/process is not available and one wants to monitor/control the process as
soon as possible.
J. Shi, the University of Michigan, shihang@umich.edu, 734-763-5321(O)
244
What do we mean by Short and Small Runs?
X-Bar and R Chart for Short Production Run
— Simplest Technique: Deviation from Nominal (DNOM)
•
•
•
•
•
Short Run: the time between different jobs/product types is short
– It is an environment that has a large number of jobs per operator in a
production cycle (typically a week or month), with each job involving
different products. (e.g., automobile maintenance shops)
Small Run: the number of the same product type is small
– It is a situation in which only a very few products of the same type are
to be produced (e.g., space shuttles).
An example of short and small run
– The computer numerical control (CNC) machines in an aerospace firm
producing only a small number of guided missiles each month.
Short runs need not be small runs
– a can manufacturing line can produce more than 100,000 cans in an
hour or two.
Small runs are not necessarily short runs
– One wing of an aircraft may requires hundreds of machining hours.
J. Shi, the University of Michigan, shihang@umich.edu, 734-763-5321(O)
•
A particular process/product characteristic can be identified for our SPC
purposes. If the following assumptions hold for that parameter, we can
use deviation from nominal (DNOM) (xi=measurementi - targetproduct) as the
process characteristic to construct control charts as we did before.
– Process standard deviation across different product types is
approximately the same (otherwise, use a standardized control chart).
– The nominal specification is the desired target value for the process.
– More than twenty samples (after aggregation) have been collected
– assumptions for a general X bar or R chart hold
• The assumption of a normal distribution holds
• DNOM is IID for different nominal values
• constant sample size constrained for the R chart
Note: It is customary to use a division line to separate different
products on the control charts (see Fig. 8-1 P351, Data Table 8-1 P350)
245
J. Shi, the University of Michigan, shihang@umich.edu, 734-763-5321(O)
246
Standardized Variable Control Charts
for Short Runs
Review of Previous Variable Charts
• Why need it?
Charts
x and R charts
Cusum charts
EWMA charts
Advantages
Easy to
construct/implement
Easy to interpret
Sensitive to small shifts
Sensitive to small shifts
Provide “predictive” info.
If process standard deviation across different product types is
different, the general DNOM chart is not appropriate
Disadvantages
Not sensitive to small shifts
Need lots of data
Need prior knowledge
Difficult to construct/implement
Difficult to interpret
Need prior knowledge
Difficult to construct manually
Need prior knowledge
Analysis procedures:
• Let R i and Ti be the average range and nominal value of x for part i
•
Plot Rs on a standardized R chart with control limits at LCL=D3
and UCL=D4
Rs = R / R
i
• Plot x on a standardized x-bar chart with control limits at LCL=A2 and UCL=A2
x − Ti
s
s
x =
Ri
• Use traditional sensitizing rules to detect out-of-control signals
J. Shi, the University of Michigan, shihang@umich.edu, 734-763-5321(O)
247
J. Shi, the University of Michigan, shihang@umich.edu, 734-763-5321(O)
248
Standardized Attribute Control Charts
for Short Runs
Attribute
Target
Value
Standard
Deviation
Some Other Methods
Statistic to plot on
the control chart
•
•
•
•
p̂ i − p
p (1 − p ) / n
Zi =
p̂i
p
p (1 − p ) / n
np̂ i
np
np (1 − p )
ci
c
nc
Zi =
ci − c
c
ui
u
u/n
Zi =
ui − u
u/n
Zi =
np̂ i − np
np (1 − p )
J. Shi, the University of Michigan, shihang@umich.edu, 734-763-5321(O)
249
Some Useful References
1.
2.
3.
4.
5.
6.
7.
8.
9.
10.
11.
J. Shi, the University of Michigan, shihang@umich.edu, 734-763-5321(O)
250
Section 9-4 SPC With AutoCorrelated Process Data
Castillo, E.D. and Montgomery, D.C. (1994) Short-Run Statistical Process
Control: Q-Chart Enhancements and Alternative Methods, Quality and Reliability
Engineering International, 10(2) 87-97.
Farnum, N.R. (1992) Control Charts for Short Runs: Nonconstant Process and
Measurement Error. Journal of Quality Technology, 24(3) 138-144.
Foster, G. (1988) Implementing SPC in Low Volume Manufacturing. 1988 Annual
Quality Congress Transactions, Milwaukee, WI: ASQC. pp. 261-267.
Hillier, F.S. (1969) X and R -Chart Control Limits Based on a Small Number of
Subgroups, Journal of Quality Technology, 1(1) 17-26.
Holmes, D. (1990) SPC Techniques for Low-Volume Batch Processes. Ceramic
Bulletin, 69(5) 818-821.
Proschan F. and Savage, I.R. (1960) Starting a Control Chart, Industrial Quality
Control, Sep, 1960, 12-13.
Pyzdek, T. (1993) Process Control for Short and Small Runs. Quality Progress,
26(4) 51-60.
Quesenberry, C.P. (1991) SPC Q Charts for Start-Up Processes and Short or Long
Runs. Journal of Quality Technology, 23(3), 213-224.
Quesenberry, C.P. (1991) SPC Q Charts for A Binomial Parameter P: Short or
Long Runs. Journal of Quality Technology, 23(3), 239-246.
Quesenberry, CP.. (1991) SPC Q Charts for A Poisson Parameter λ : Short or
Long Runs. Journal of Quality Technology, 23(4), 296-303.
Wheeler, D.J. (1991) Short Run SPC. Knoxville, Tennessee: SPC Press, Inc.
J. Shi, the University of Michigan, shihang@umich.edu, 734-763-5321(O)
Cusum and EWMA control charts with n=1
Modified DNOM (error reported as percentage of the reading)
Q chart (other transform)
Kalman filter
Why need to study it?
– Less defects rates and high quality require
100% inspection. This generally results in
correlated inspection data.
– Recently the sensing techniques and computer
capacity become more powerful, thus, 100%
inspection becomes more important.
– Applications:
• Autobody assembly process using OCMM (perceptron)
• Painting process using interferometer (Autospec)
• Semiconductor using optical/image measurement
251
J. Shi, the University of Michigan, shihang@umich.edu, 734-763-5321(O)
252
Example
•
Based on Data to Construct Control Charts
Sampling one out of every five products: individual x and moving R chart.
sequence #
x
mR
1
6
11
16
21
26
31
36
41
46
51
56
61
66
71
76
81
86
91
96
Average
29.33
32.68
28.94
27.63
30.80
33.22
29.04
30.29
32.43
28.12
27.99
28.78
33.61
25.12
32.01
24.28
28.17
16.56
26.14
31.68
28.841
•
3.35
3.74
1.31
3.17
2.42
4.18
1.25
2.14
4.31
0.13
0.79
4.83
8.49
6.89
7.73
3.89
11.61
9.58
5.54
4.492
J. Shi, the University of Michigan, shihang@umich.edu, 734-763-5321(O)
The traditional way of constructing the
control charts and control limits:
29.33
19.98
25.76
29
31.03
32.68
33.56
27.50
26.75
30.55
28.94
28.50
•
•
31.95
31.68
29.10
23.15
26.74
32.44
28.569
UCL = 28.841 + 3(4.492)/1.128 = 40.788
CL = 28.841
LCL = 28.841 - 3(4.492)/1.1.28 = 16.894
28.84
CL
LCL
16.89
1
(2) Moving R chart:
UCL = 4.492(3.267) = 14.675
CL = 4.492
LCL = 0
11
21
31
41
51
61
71
81
91
moving R chart
16
UCL
14
12
10
8
6
CL
4
2
We could do lots of things with the data
(estimate process mean, process variation,
process stability, process capability, etc.)
0
LCL
6
16
26
36
46
56
66
76
86
J. Shi, the University of Michigan, shihang@umich.edu, 734-763-5321(O)
253
96
254
Comparison Results
•
9.35
5.78
3.24
2.03
1.65
0.88
6.06
0.75
3.80
1.61
0.44
•
•
0.42
0.27
2.58
5.95
3.59
5.70
3.212
J. Shi, the University of Michigan, shihang@umich.edu, 734-763-5321(O)
UCL
(1) Individual x chart:
Suppose, due to a breakthrough of the inspection technology, 100% inspection becomes feasible. All
the parts are measured:
sequence #
x
mR
1
2
3
4
5
6
7
8
9
10
11
12
•
•
95
96
97
98
99
100
average
individual x chart
40.79
•
Compare the estimated process parameters from two data
sets:The estimated process standard deviations are very different!
Why are they different? Is this purely a coincidence? Which one
should we use?
sampled data
complete data
x
28.841
R
R /d2
4.492
3.212
3.982
2.848
28.569
45
45
UCL
UCL
35
35
CL
CL
25
25
LCL
LCL
15
1
11
21
31
41
51
61
71
81
91
Using sampled data to estimate the parameters
255
15
1
11
21
31
41
51
61
71
81
91
Using complele data to estimate the parameters
J. Shi, the University of Michigan, shihang@umich.edu, 734-763-5321(O)
256
Mathematical Definition of Autocorrelation
Autocorrelation
•
• What is autocorrelation?
– Some times called serial correlation
– Autocorrelation describes the dependence of data over
time
– Recall one of the basic assumptions for Shewhart
charts to work is data independence. This assumption
would usually hold if the products are being sampled.
– It is important to recognize, however, that all
manufacturing processes are driven by inertial
elements, and when the interval between samples
becomes small relative to these forces, the
observations on the process will be correlated over
time.
J. Shi, the University of Michigan, shihang@umich.edu, 734-763-5321(O)
The correlation over a series of time-oriented observations is
measured by the autocorrelation functions:
ρk =
cov(x t , x t − k )
;
V (x t )
•
– where the covariance of observations is k times periods apart.
We have assumed that the observations have constant
variance.
All autocorrelation functions are bounded by [-1, 1].
•
The sample autocorrelation functions are:
n
ρˆ k =
257
k = 0,1,2,... ρ0 = 1
∑ (x
t = k +1
t
n
− x )(x t − k − x )
2
∑ (x t − x )
;
k = 0,1,2,...
t =1
J. Shi, the University of Michigan, shihang@umich.edu, 734-763-5321(O)
258
How to determine if the data are autocorrelated?
How to determine if the data are autocorrelated?
There are several ways of checking autocorrelations.
1) Graphical method: Scatter plot
– Just plot xt vs xt-1 and visually inspect if there is any
correlation. In our example, we can have scatter plots
for both the sampled and the complete data:
x(t)
40
x(t)
40
30
30
20
20
10
10
0
2) Numerical method: Sample autocorrelation functions
• Determine the sample autocorrelation functions for our sample data
using Excel's CORREL function.
• In a cell of your choice, type:
– CORREL(array1,array2)
– where array1 is the cell range of the data except the first entry, x(1)
and array2 is the cell range of the data except the last entry, x(100).
0
0
10
20
x(t-5)
30
40
0
10
20
X(t-1)
30
Scatter plot of the sampled data.
Scatter Plot of the complete data.
No autocorrelation
Autocorrelation exists.
J. Shi, the University of Michigan, shihang@umich.edu, 734-763-5321(O)
40
259
J. Shi, the University of Michigan, shihang@umich.edu, 734-763-5321(O)
260
•
•
The autocorrelation for the above example:
ρ̂1 (sampled data) = 0.018; ρ̂1 (complete data) = 0.510
How large an autocorrelation function is large?
Yes! Autocorrelation does play an important role in this particular
process.
What about the order of the autocorrelation function, k?
– We can compute the second and higher-order sample
autocorrelation functions: In our example, we can use the function,
CORREL to compute ρ̂ 2by assigning x(1) ~ x(98) as array1 and x(3) ~
x(100) as array2.
– After getting a series of
chart:
n
ρˆ 2 =
∑ (x
t =3
t
n
•
A simple rule of thumb: any absolute sample autocorrelations,
2
, greater than
are large
ρ̂ k
number of observations, n
that is, they are statistically significant, with α= 0.05 roughly).
•
,Sample
we can
plot them
on rho(k)
a column
autocorrelation
functions,
In our example, n = 100, 2 / n = 0.2 is the boundary.
Sample autocorrelation functions, rho(k)
1.0
1.0
− x )(x t − 2 − x )
2
∑ (x t − x )
0.2
0.0
-0.2
0.0
1
2
3
4
5
lag, k
t =1
1
2
3
4
5
lag, k
-1.0
-1.0
J. Shi, the University of Michigan, shihang@umich.edu, 734-763-5321(O)
261
When should consider autocorrelation?
•
•
•
262
How to analyze data with autocorrelation?
Dynamic systems:
– A dynamic system is one that experiences a memory effect in response to
the external disturbances to the system.
– A dynamic system can be analyzed and described in a continuous time
frame or a discrete time frame in terms of the transfer functions. If a
discrete time frame is being used, the data being recorded with a small
time interval usually have very strong autocorrelation.
Static systems:
– on the other hand, is one that does not remember its past behavior and
response to the external disturbances instantaneously. If the external
disturbances are purely random variables (i.e., white noises, as
mechanical engineers call them), the system output would be just a series
of independent random numbers. No autocorrelation would be observed,
the traditional control charts would work just well.
Sampling intervals:
– When the sampling intervals get larger and larger, the autocorrelation,
even if it exists, will gradually disappear in the data. We use system time
constant to characterize the time a system takes to reach a new state after
being “excited”. (e.g., the time you have to wait when taking your body
temperature.) If, in an intuitive sense, the sampling interval is longer than
the system time constant, one would not expect to detect autocorrelation
in the observed data. This was exactly what happened in our example.
J. Shi, the University of Michigan, shihang@umich.edu, 734-763-5321(O)
J. Shi, the University of Michigan, shihang@umich.edu, 734-763-5321(O)
(1) The statistician’s approach
• Worst suggestion: Increase sampling intervals to avoid autocorrelations.
– Why not good? It is counter-evolutionary. Even though autocorrelation
complicates our data analysis procedure, we should not just throw away the
important information about the system dynamics and go back to the “good old
days” in which everything was assumed IID normal.
• Expand the control limits to compensate for the underestimation of the
process variance.
– If the sample first-order autocorrelation function is roughly between
-0.5 and +0.5, Hunter (1988) suggests the following modified control limits:
UCL = x + 3
ˆ 2
σ′
2(n − 1)ρˆ 1
1+
n
n
LCL = x − 3
ˆ 2
2(n − 1)ρˆ 1
σ′
1+
n
n
R
where σˆ ′ =
is the standard deviation estimated from the range chart, and n is
d2
the sample size. If n = 1 (for the individual x chart) use n = 2 in the second square
root.
263
J. Shi, the University of Michigan, shihang@umich.edu, 734-763-5321(O)
264
In the example:
How to analyze data with autocorrelation?
ˆ 2
σ′
2(n − 1)ρˆ 1
UCL = x + 3
1+
= 28.57 + 3 × 2.85 × 1 + 0.51 = 39.08
n
n
2. Time Series methodology:
• A useful tool for analyzing system dynamics and data
autocorrelations in the discrete time domain.
– Time series methodology is extensively covered in ME563/IOE565.
σˆ ′2
2(n − 1)ρˆ 1
LCL = x − 3
1+
= 28.57 − 3 × 2.85 × 1 + 0.51 = 18.06
n
n
• Basic ideas:
45.00
– Once the autocorrelations are detected (utilizing previous
methods), we can use some types of computer coded
algorithm to fit an ARMA (autoregressive moving average)
model [ARMA (n, m)] for the data:
UCL, sampled
UCL, modified
UCL, complete
x t − φ1x t −1 − φ 2 x t −2 − ... − φ n x t − n = ξ + ε t − θ1ε t −1 − θ 2 ε t − 2 − ... − θ m ε t −m
30.00
CL
LCL, complete
LCL, modified
LCL, sampled
15.00
1
11
21
31
41
51
61
71
81
91
J. Shi, the University of Michigan, shihang@umich.edu, 734-763-5321(O)
Comparison of different control limits.
265
J. Shi, the University of Michigan, shihang@umich.edu, 734-763-5321(O)
How to analyze data with autocorrelation?
— Using ARMA modeling
More about ARMA(n,m) Model
x t − φ1x t −1 − φ 2 x t −2 − ... − φ n x t − n = ξ + ε t − θ1ε t −1 − θ 2 ε t − 2 − ... − θ m ε t −m
•
Where ξ is the process mean; xt is the output readings. εt is the estimated
unmeasurable disturbances. This procedure, called system identification. φi’s and
θi’s are the model parameters. Note that φi is not ρi.
•
In order to have accurate estimates of the parameters, it is suggested to have at least
200 data points.
•
For AR(1) models, the extreme value φ1 =1 means the process has a slow
wondering mean. It is called a random walk. Stock market prices are an
excellent example.
ε t , so called disturbances or residuals, should be IID N(0, σ ε2 ) if the empirical
model fits the real system well enough.
J. Shi, the University of Michigan, shihang@umich.edu, 734-763-5321(O)
266
267
Fit an appropriate ARMA model to the data and plot the residuals on the
Shewhart charts.
– Sounds good. As argued above, should be IID normal, and therefore
is a “perfect” candidate for Shewhart control charts in the sense that
all the requirements for the Shewhart charts are met.
Limitations:
– does not have physical meanings except that it provides a check for
model validity. An out-of-control signal on a control chart tells us
that the empirical model no longer fits the true system. Is it showing
that the process is out-of-control? May be, may be not.
– It is sensitive to the accuracy of ARMA modeling
In our example, It is told that the appropriate model is (using computer
codes to do model fitting, you’d learn how to do it in IOE565)
xˆ t = 20 .62 + 0 .777 x t −1 − 0 .492 x t − 2 + a t
(
The residuals are approximately N 0,3.202
) (recall the raw data has standard
deviation ~ 3.50. The ARMA model has reduced the standard deviation by ~
10%)
J. Shi, the University of Michigan, shihang@umich.edu, 734-763-5321(O)
268
•
In our example, It is told that the appropriate model is (using computer
codes to do model fitting, you’d learn how to do it in IOE565)
Different Views of the Autocorrelation
•
xˆt = 20.62 + 0.777xt −1 − 0.492xt −2 +at
(
The residuals are approximately N 0,3.202
) (recall the raw data has standard
deviation ~ 3.50. The ARMA model has reduced the standard deviation by ~
10%)
– The traditional control charts fail terribly when being applied to
autocorrelated data.
•
UCL
•
CL
1
11
21
31
41
51
61
71
81
91
J. Shi, the University of Michigan, shihang@umich.edu, 734-763-5321(O)
The traditional SPC methodology is a reactive approach.
– The process is left alone as long as no out-of-control signal is
detected. The opportunity of process improvement (reducing
process variability and/or bringing the process mean to target)
appears only when the process is being diagnosed as out-of-control.
Even when an alarm goes off, it is not guaranteed that the process
will be improved. The signal might be a false alarm, or no
assignable causes can be identified or removed.
LCL
-10.00
As engineers, however, we should think of autocorrelations as the
opportunity of process improvement.
– When autocorrelations are present, it means that the processes are
somewhat predictable. Since the data is NOT totally random (as
being required by the traditional SPC tools), the process behavior is
following a specific pattern. This observation opens up a whole
different viewpoint of controlling the process variability. We should
consider taking a proactive approach to control the process.
Plot the residuals on the control chart:
10.00
0.00
Almost 99% of the statisticians would think of autocorrelations as the
“trouble-makers” in a sense that their existence makes the statistical
inferences about the data very difficult and tricky.
269
J. Shi, the University of Michigan, shihang@umich.edu, 734-763-5321(O)
270
Different Views of the Autocorrelation (Cont’s)
•
On the other hand, the Engineering Process Control (EPC) approach, takes
full advantages of system dynamics (i.e., process predictability) and
proactively manipulates the process to minimize the process variability and
maintain the process mean.
Ch. 10 Multivariate Quality Control
– It is beyond the scope of this course to go further and discuss how to
perform engineering control. Basically, you have to identify one or
more controllable process variables (the input), and adjust the input
in order to compensate any possible disturbances that would drive
the process away from target. A “closed-loop” control scheme can
effectively reduce the process variability.
Disturbances,
Input
• Monitoring of Process Mean
– Chi-square Control Chart
– Hotelling T2 control chart
• sample size n>1
• Sample size n=1
εt
Process
Output,
– Interpretation of out-of-control signals
• Monitoring Process Variability
– test covariance matrix
– test sample generalized variance
xt
Controller
•
•
You should know that when you are faced with autocorrelation, do not just
come up with some fancy control charts that sound statistically correct , but
do little in improving processes. Work together with the engineers and try
to perform proactive controls if at all possible.
A future trend: Combined the SPC (Statistical Process Control) and APC
(Automatic Process/feedback Control).
J. Shi, the University of Michigan, shihang@umich.edu, 734-763-5321(O)
271
J. Shi, the University of Michigan, shihang@umich.edu, 734-763-5321(O)
272
Need for Multivariate Control Charts
Chi-Square Control Chart
— Known process mean & variance matrix
• Simultaneous monitoring or control of two or more related
quality characteristics is necessary
• Using individual control charts to monitor the independent p
variables separately can be very misleading
– Decision rule 1: if one variable is out of control, then
system is concluded to be out-of-control
• Assumption: The joint probability distribution of the p
variables is the p-variate normal distribution
• use x-bar chart for each variable, let Pr{Type I error}=α, then the Type
I error for the joint control of p independent variables could be very
large for a large p
• Sample statistic and control limits
α’=1-(1-α)p
χ 02 = n ( X − µ ) T Σ −1 ( X − µ )
UCL = χ α2 ,p
– Decision rule 2: if all variables are out of control, then the
system is concluded to be out-of-control
• How to use control charts:
2
– plot χ 0 of each sample on the control chart and check
with the UCL
– check any nonrandom patterns
• use x-bar chart for each variable, let Pr{Type II error}=β, then the
Type II error for the joint control of p independent variables could be
very large for a large p
β’=1-(1- β)p
• For dependent variables, there is no easy way to measure the
distortion in the joint control rules
J. Shi, the University of Michigan, shihang@umich.edu, 734-763-5321(O)
273
J. Shi, the University of Michigan, shihang@umich.edu, 734-763-5321(O)
274
Hotelling T2 Control Chart
(sample size n>1)
Geometry Interpretation of Chi-square Control Chart
• T2 statistic: T 2 = n ( X − X) T S −1 ( X − X)
• For p=2, it forms a control ellipse
n
χ 02 = 2 2
[σ 22 ( x1 − µ1 ) 2 + σ12 ( x 2 − µ 2 ) 2 − 2σ12 ( x1 − µ1 )( x 2 − µ 2 )]
2
σ1 σ 2 − σ12
Sample average
mean
– If σ12=0, the principal axes parallel to the x1 , x 2
– If σ12=0 and σ1=σ2, the control ellipse becomes a circle
• a pair of sample average (x1 , x 2 ) plotting inside of the
ellipse indicates that the process is in control.
1 n
x jk = ∑ x ijk ;
n i =1
Total average
xj =
1 m
∑ x jk ;
m k =1
1 m 2
∑ S jk
m k =1
variance
S2jk =
1 n
∑ (x ijk −x jk ) 2 ;
n − 1 i =1
Sj2 =
covariance
S jhk =
1 n
∑ (x ijk −x jk )(x ihk − x hk ) ;
n − 1 i =1
Sjh =
1 m
∑ S jhk
m k =1
ith observation (i=1,…,n)
j, hth variable (quality characteristic) (j,h=1,…p, j≠h)
kth sample (k=1,…,m)
J. Shi, the University of Michigan, shihang@umich.edu, 734-763-5321(O)
275
J. Shi, the University of Michigan, shihang@umich.edu, 734-763-5321(O)
276
Example:
Construct a Hotelling T2 Control Chart
• Two distinct phases of control chart usage
– phase I: testing whether the process was in control
when the m preliminary subgroups were drawn and the
sample statistics X and S computed (m>20)
UCL =
p( m − 1)( n − 1)
Fα, p ,mn −m − p +1 ; LCL = 0
mn − m − p + 1
– Phase II: monitor the future observation
UCL =
p( m + 1)( n − 1)
Fα, p ,mn −m − p +1 ; LCL = 0
mn − m − p + 1
T2 =
• if large number of preliminary samples are used, it is
customary to use UCL = χα2 ,p as the upper control limit in
both phases
n
[ s22 ( x1 − x1 ) 2 + s12 ( x 2 − x 2 ) 2 − 2s12 ( x1 − x1 )( x 2 − x 2 )]
s12 s22 − s122
Reference: Alt, F. B. (1985), “Multivariate Quality Control,” Encyclopedia of Statistical
Science, Vol. 6, edited by N. L. Johnson and S. Kotz, John Wiley, New York, pp. 110-122.
J. Shi, the University of Michigan, shihang@umich.edu, 734-763-5321(O)
277
J. Shi, the University of Michigan, shihang@umich.edu, 734-763-5321(O)
278
Monitor Process Variability
Interpretation of Out-of-Control Signals
How to find which of the p variables is responsible for the
out-of-control signal?
– Simultaneous univariate control chart
– Simultaneous confidence intervals
– Control chart for p principle component
– Decomposition of T2 control chart
•
Repetitively test the significance of the hypothesis that the process
covariance matrix is equal to a particular matrix of constants Σ
•
Test on the sample
generalized variance |Si|
2
Wi = −pn + pn ln(n ) − n ln(|| A i | / | Σ |) + tr (Σ −1A i ) ; A i = (n − 1)Si
UCL = χ α ,p ( p +1) / 2
E(| S |) = b1 | Σ |;
V(| S |) = b 2 | Σ |
UCL =| Σ | (b1 + 3 b 2 )
•
Remarks: CL = b | Σ |
1
b1 =
b2 =
2
p
1
∏ (n − i)
(n − 1) p i =1
p
1
⎡
p
p
J. Shi, the University of Michigan, shihang@umich.edu, 734-763-5321(O)
279
2p
J. Shi, the University of Michigan, shihang@umich.edu, 734-763-5321(O)
⎤
∏ (n − i)⎢∏ (n − j + 2) − ∏ (n − j)⎥
(n − 1) i=1
j=1
– It lost the individual variance information.
⎣ j=1
LCL =| Σ | (b − 3 b )
– Recommended 1to use2 univariate
| Σˆ |=control
| S | / b1 charts for variability
in conjunction with the control chart for |S|
⎦
280
Ch7 Contents
Ch7 Process Capability Analysis
•
•
•
•
7-1 Introduction
7-2 Process Capability Analysis Using a Histogram
7-3 Process Capability Ratio
7-4 Process Capability Analysis Using a Control Chart
7-5 Process Capability Analysis Using a Designed Experiments
7-6 Gage and Measurement System Capability Analysis
7-7 Setting Specification Limits
7-8 Natural Tolerance Limits
PCR, PCRk, PCRkm
C.I. and Hypothesis testing of PCR
Gage Capability Study
Setting Specification limits
J. Shi, the University of Michigan, shihang@umich.edu, 734-763-5321(O)
281
J. Shi, the University of Michigan, shihang@umich.edu, 734-763-5321(O)
282
Why Need to Study It?
Process Capability Analysis and Techniques
1) Predicting ability to hold tolerances.
2) Assist product developers/designers in selecting
/designing processes.
3) Assist in establishing an interval between sampling.
4) Specifying requirements of new equipment.
5) Selecting between vendors.
6) Planning production sequences with inter-active effects of
processes on tolerances.
7) Reducing variability in manufacturing process.
Three primary techniques
– histograms or probability plot to know the distribution, and get the
parameter estimation
• product characterization can only use this method
– PCR analysis using control charts to obtain estimation of the
parameters (will be discussed in the lecture)
• better approach for understanding process capability by monitoring process
variability
– design experiments to isolate and estimate the sources of process
variability
The above general activity is called process capability analysis, involving:
•
product and process design
•
vendor sourcing
•
production or manufacturing planing
•
manufacturing process control
J. Shi, the University of Michigan, shihang@umich.edu, 734-763-5321(O)
•
• effective way for understanding the effect of process variables on the outputs to
finally realize optimization of process design and control
283
J. Shi, the University of Michigan, shihang@umich.edu, 734-763-5321(O)
284
Description of Process Capability
Review of PCR
Process capability refers to the uniformity of the process, representing
by
– natural or inherent variability at a specified time: “instantaneous” variability
– variability over time
Natural tolerance limit
– It is customary to take the 6-sigma spread in the distribution of the product
quality characteristic as a measure of process capability
•
•
•
Process-Capability Ratio
PCR =
USL − LSL
;
6σ
σˆ = R / d 2 ;
USL − LSL
;
6σˆ
or σˆ = S / c 4 ; or
R chart
LNTL = µ – 3 σ
UNTL = µ + 3 σ
For normal distribution, we expect 99.73% of data between UNTL and LNTL.
PCR =
S chart
S2
samples
PCR=1 means the process uses up 100% tolerance band with
0.27% (2700PPM) nonconforming units for a normal distribution
PCR: process ability to manufacture products that meet specification
•
•
Percentage of the specification band used up by the process
P=(1/PCR)100%
J. Shi, the University of Michigan, shihang@umich.edu, 734-763-5321(O)
285
J. Shi, the University of Michigan, shihang@umich.edu, 734-763-5321(O)
286
Review of SL, CL and NTL
•
•
T h e re is n o re la tio n s h ip b e tw e e n c o n tro l lim its a n d s p e c ific a tio n lim its .
P C R is a n in d e x re la tin g n a tu ra l to le ra n c e lim its to s p e c ific a tio n lim its .
Externally
determined
LSL
More about Process Capability Ratio
A s lo n g a s
USL– LSL > UNTL– LNTL
w e a r e c a p a b le o f p r o d u c in g a la r g e
p r o p o r tio n o f g o o d ite m s b y c o n tr o llin g
(c e n te r in g ) th e p r o c e s s m e a n .
•
PCR =
•
LNTL
LSL
LNTL 3σ
µ 3σ
UNTL
LNTL 3σ
µ 3σ
UNTL
Distribution of individual
process measurement
Distribution
of x bar values
One-sided specification
PCR>1, P<100%
PCR U =
USL
USL − LSL
6σ
USL − µ
;
3σ
PCR L =
µ − LSL
;
3σ
3σ
LCL
3σ
n
Two- sided specifications
Center line
on x bar
µ
3σ
LSL
PCR=1, P=100%
•
Estimation of PCR are obtained by replacing µ and σ with the
estimates of µ̂ and σ̂
USL
UCL
UNTL
USL
LNTL
LSL 3σ
µ
3σ
USL
PCR<1, P>100%
UNTL
Externally
determined
J. Shi, the University of Michigan, shihang@umich.edu, 734-763-5321(O)
287
J. Shi, the University of Michigan, shihang@umich.edu, 734-763-5321(O)
288
PCR vs Defective PPM
Normally Distributed Process with the centered mean
Recommended Minimum PCR
PPM: defective or nonconforming parts per million
Table 7-3, P360
Table 7-4, P361
Two Spec.
Existing Process
New Process
Critical Existing
Critical New Process
J. Shi, the University of Michigan, shihang@umich.edu, 734-763-5321(O)
289
1.33
1.50
1.50
1.67
One Spec.
1.25
1.45
1.45
1.60
J. Shi, the University of Michigan, shihang@umich.edu, 734-763-5321(O)
290
Example
Sheet metal components for an autombile (Doors, Fenders, Hood, etc.) are placed in a
fixture to measure conformance to specifications. The fixture is 3mm larger than the
nominal dimensions of the part. The gap between the part and the fixture is measured in
"critical" positions. The data are reported as deviations from 3mm (i.e. deviations from the
nominal).
PCRk (Off–Center Processes)
• To take process centering into acount, define
A sample of 30 parts are mounted in the fixture and measured. Summary data (in mm) for
one critical position follow:
PCRk = min { PCRU, PCRL }
µ – LSL
USL – µ
; PCRL =
where PCRU =
3σ
3σ
• PCRk is just one side PCR for the specification limit closest to µ
(use one side specification on Table 9-3 to get PPM).
USL: .75
LSL: -.75
X = -.54
^σ = .08
UNTL = -.54 + 3 (.08) = -.30
LNTL = -.54 – 3 (.08) = -.78
beyond LSL
• If the process is centered , then PCR = PCRk ;
If not centered, then PCRk < PCR.
Note: USL – LSL > UNTL – LNTL
^
PCR
=
USL – LSL
^
6σ
=
.75 – (-.75)
6(.08)
= 3.125
• PCR measures potential capability, PCR measures actual capability
k
Note: This process has the potential to have virtually 100% to specification
J. Shi, the University of Michigan, shihang@umich.edu, 734-763-5321(O)
291
J. Shi, the University of Michigan, shihang@umich.edu, 734-763-5321(O)
292
Example: to calculate PCR and PCRk for the following two processes
with LSL=35, USL=65
Process A: µA=50, σA=5
Process B: µB=57.5, σB=2.5
J. Shi, the University of Michigan, shihang@umich.edu, 734-763-5321(O)
293
J. Shi, the University of Michigan, shihang@umich.edu, 734-763-5321(O)
Discussion on PCRkm
More about Process Capability Index
PCR
=
km
•
•
•
USL – LSL
6τ
USL–LSL
+
2
• Note: Variance is composed of two components
2
= E[ (x – T) 2 ] = σ2 + (µ – T) 2 ;
•
T =
Hence,
=
PCR
J. Shi, the University of Michigan, shihang@umich.edu, 734-763-5321(O)
2
1+ξ
km
=
PCR
V=
;
1+ V2
T−x
S
Third generation process capability ratio: increase the sensitivity
to departures of µ from T,
PCR pkm =
295
1
( USL − LSL )
6
The estimation of PCRkm is
PCR
•
USL – LSL
PCR
=
2
2
km
6 σ +(µ–T)
T–µ
ξ =
σ
PCRkm range: 0≤ PCRkm ≤ PCR (however, PCRk could be negative)
When µ=T, PCRk=PCRkm
A given value of PCRkm places a constraint on the |µ−T|
– A necessary condition for PCRkm≥1 is:
| µ − T |<
τ : square root of expected square deviation from target
τ
294
PCR k
⎛µ−T⎞
1+ ⎜
⎟
⎝ σ ⎠
2
=
PCR k
1 + ξ2
J. Shi, the University of Michigan, shihang@umich.edu, 734-763-5321(O)
PCR: the first generation
PCRk: the second generation
296
Problem 9-7: Consider the two processes shown below:
Problem 7-6: A process is in control with
x = 75 and S = 2.
The process specifications are at 80±8. N=5
a.
Estimate the potential capability.
b.
Estimate the actual capability.
c.
How much could process fallout be reduced by shifting the mean to the
nominal dimension?
Process A:
X A = 100
SA = 3
Process B:
X B = 105
SB = 1
n=5
Specifications are at 100 ± 10.
Calculate PCR, PCRk, and PCRkm and interpret these ratios
Which process would you prefer to use?
Assume that quality characteristic is normally distributed
J. Shi, the University of Michigan, shihang@umich.edu, 734-763-5321(O)
297
J. Shi, the University of Michigan, shihang@umich.edu, 734-763-5321(O)
298
Confidence Intervals for PCR
Problem 9-8: Suppose that 20 of the parts manufactured
by the processes in example 2 were assembled so that
their dimensions were additive; that is,
x = x1 +x2 +.....x20
Based on PCR =
Specifications on x are 2000 ± 200. Would you prefer to
produce the parts using process A or process B? Why?
Do the capability ratios computed in problem 9-7 provide
any guidance for process selection?
J. Shi, the University of Michigan, shihang@umich.edu, 734-763-5321(O)
PCR
c4
299
USL − LSL
, thus
6σ
χ 2 1 − α / 2 , n −1
PCR
≤ PCR ≤
c4
n −1
J. Shi, the University of Michigan, shihang@umich.edu, 734-763-5321(O)
χ 2 α / 2 , n −1
n −1
300
textbook, P368
J. Shi, the University of Michigan, shihang@umich.edu, 734-763-5321(O)
301
J. Shi, the University of Michigan, shihang@umich.edu, 734-763-5321(O)
302
Gage and Measurement System Capability
• Why need it?
• Total variability decomposition
2
σ 2total = σ 2product + σ gage
2
σ 2measurement _ error = σ gage
= σ 2repeatability + σ 2reproducibility
inherent precision of gage
J. Shi, the University of Michigan, shihang@umich.edu, 734-763-5321(O)
303
J. Shi, the University of Michigan, shihang@umich.edu, 734-763-5321(O)
different operators or conditions
304
Example 7-7 P378
Gage Capability Criteria
• Precision to tolerance ratio or P/T ration
6σˆ gage
P
=
< 0.1
T USL − LSL
• gage error as a percentage of the product variability
σˆ gage
×100%
σˆ product
• X-bar chart represents variability between different product units
• R chart represents the gage measurement variability:
R
σˆ gage =
2
σ 2total = σ 2product + σ gage
J. Shi, the University of Michigan, shihang@umich.edu, 734-763-5321(O)
305
d2
J. Shi, the University of Michigan, shihang@umich.edu, 734-763-5321(O)
306
Example 7-8 P380
Gage and Measurement System Capability
•
Variation Decomposition
2
2
σ 2total = σ 2product + σ gage
⇒ σ 2measurement = σ gage
= σ 2repeatability + σ 2reproducibility
r
σ 2total =
r
x=
(1) average of all ranges
1
1
R = (R 1 + R 2 + R 3 ) = (1 + 1.25 + 1.2) = 1.15
3
3
(2) Difference among operators
R x = x max − x min = 22.60 − 22.28 = 0.32
σˆ repeatability =
σˆ reproducibility =
Rx
0.32
=
= 0.19
d 2 |n =3 1.693
(3) Each operator’s average
J. Shi, the University of Michigan, shihang@umich.edu, 734-763-5321(O)
n
k =1 i =1 j=1
kij
− x)
rmn − 1
m
n
∑∑∑ x
k =1 i =1 j=1
kij
rmn
Use R chart for estimation
r: # of operators
m: # of samples
n: # of repeated measurements
xkij :
i: sample index
j: repeated measurement index
k: operator index
R
1.15
=
= 1.02
d 2 |n = 2 1.128
x max = max(x1 , x 2 , x 3 )
x min = min( x1 , x 2 , x 3 )
m
∑∑∑ ( x
307
σˆ repeatabil ity =
r
R=
∑R
k =1
m
Rk =
k
σˆ reproducib ility =
RX
d2
R X = x max − x min ;
x max = max( x 1 , x 2, … , x r )
x min = min( x 1 , x 2 , … , x r )
r
∑R
i =1
R
d2
J. Shi, the University of Michigan, shihang@umich.edu, 734-763-5321(O)
m
m
ki
m
R ki = max j ( x kij ) − min j ( x kij )
xk =
∑x
i =1
m
ki
=
n
∑∑ x
i =1 j=1
xij
mn
308
Setting Specification Limits on Discrete
Components
Gage and Measurement System Capability (Cont’s)
N am e of lim it
•
Gage capability: precision-to-tolerance ratio (P/T ratio)
Toler anc e
– Generally, an adequate gage capability: P/T≤0.1
6σˆ gage
P
=
T USL − LSL
(SPL)
– independent of specification limits
P redic tion
σˆ gage
×100%
σˆ product
Calcula ted f rom pr oces s data to def ine the lim its w hich w il l
cont ain a ll of k f utur e obs er vations
Conf ide nce
σ
2
= σ 2repeatability + σ 2reproducibility
σ 2repeatability σgage
σ 2reproducibility
σ
2
σ 2product = σ 2total − σ gage
2
gage
S et by the engineer ing des ign f unction to de f ine t he minimum
and m axim um val ues allowa ble f or the pr oduct to w or k
pr oper ly
S tatis tic al t oler ance (NTL) Calcula ted f rom pr oces s data to def ine the amount of var ia tion
tha t the pr oce ss exhibits ; thes e limits w il l cont ain a spe cif ied
pr opor tion of the total population
• gage variability-to-product variability ratio
2
total
Meaning
Contr ol
σ 2product
J. Shi, the University of Michigan, shihang@umich.edu, 734-763-5321(O)
309
(C. I)
(CL)
Calcula ted f rom data to def ine an inter va l w ithin which a
popula tion pa r ame ter l ies
Calcula ted f rom pr oces s data to def ine the lim its of cha nce
( random ) var iation ar ound s ome c entr al val ue
J. Shi, the University of Michigan, shihang@umich.edu, 734-763-5321(O)
310
Example (cont’s)
The approach of adding component tolerances is too conservative!
Example
Suppose that about 1% if A component is below lower tolerance
limits. Likewise for B and C.
Suppose three components were manufactured to the specifications
indicated below:
Assembly
A
B
1.000
± 0.001
0.500
± 0.0005
If assemblies are made at random and if the components are
manufactured independently, then the chance that an assembly will
have all three components simultaneously below the lower
tolerance limit is
C
2.000
± 0.002
A “logical” specification on the assembly length would be 3.500 ± 0.0035.
Maximum Minimum
1.0010
0.5005
2.0020
3.5035
0.9990
0.4995
1.9980
3.4965
J. Shi, the University of Michigan, shihang@umich.edu, 734-763-5321(O)
1
1
1
1
x
x
=
100 100 100
1, 000,000
Thus, setting component and assembly tolerances based on the
simple stacking of tolerances is conservative; failing to recognize
low “joint probabilities”.
311
J. Shi, the University of Michigan, shihang@umich.edu, 734-763-5321(O)
312
Recall the variance of sums of independent events:
σ result =
σ 2cause A + σ 2cause B + σ 2cause C +
Assumptions
The formula is based on several assumptions:
For the assembly example:
σ assembly =
• Each component dimension is independent and the components are assembled randomly.
(usually met in practice).
σ 2A + σ 2B + σ2C +
• Each component dimension should be normally distributed. (robust to this assumption)
• The component has mean = nominal spec.
Suppose for each component the tolerance range is equal to ± 3
standard deviations (natural tolerance limits; process capability =
1.0). The variance relationship may be rewritten as
Tassembly =
Bender (1975) has studied these assumptions for some complex assembly cases and
concluded based on a "combination of probability and experience" that a factor of 1.5
should be included to account for the assumptions, i.e.,
Tresult = 1.5
TA + TB + TC
2
2
2
Variation Simulation Analysis (VSA) uses simulation to analyze tolerances with/without
normality and with/without independence; see Rowzee and Holmes (1986).
Thus the squares of tolerances are added to determine the square of
the tolerance for the overall result.
J. Shi, the University of Michigan, shihang@umich.edu, 734-763-5321(O)
TA2 + TB2 + TC2 +
313
J. Shi, the University of Michigan, shihang@umich.edu, 734-763-5321(O)
314
Example 2:
Two mating parts are assembled as shown below:
X Y
7-7.1 Linear Combinations
Now let’s generalize a bit. For linear, independent assemblies
y = a1 x1 + a2 x2 +
Assume
x i ~ N(µ 0i , σi2 )
an x n
µx = 2.010 cm., σx = .002 cm.
µy = 2.004 cm., σy = .001 cm.
We recall,
E(y) = a1 E(x1 ) + a2 E(x 2 )+
What fraction of parts will have positive clearance?
an E(xn )
Var(y) = a1 Var(x1 ) + a2 Var(x 2 )+ an Var(x n )
2
2
2
J. Shi, the University of Michigan, shihang@umich.edu, 734-763-5321(O)
315
J. Shi, the University of Michigan, shihang@umich.edu, 734-763-5321(O)
316
Applications
•
P388 )
y=
n
∑c x
i =1
i
i
⇒ µy =
n
∑c µ
i =1
i
i
⇒σ =
2
y
⎛ USL − µy
Pr{LSL ≤ y ≤ USL} = Φ⎜⎜
σy
⎝
•
7-7.2 Nonlinear Combinations
Assembly process assessment
– Calculate the nonconforming fraction of the final assembled
product when each component distribution is known (Example 7-9,
n
∑c
i =1
2
i
For nonlinear functions
σ
y = g(x1 , x2 ,
2
i
⎞
⎛
−µ
⎟ − Φ⎜ LSL y
⎟
⎜ σ
y
⎠
⎝
⎞
⎟
⎟
⎠
We can use a second order Taylor series approximation to g
and expand the solution around µ1, µ2, ...., µn
Tolerance design for each component (Example 7-10, P389 )
– To meet the specification limits of the final assemblies
y = g(x1 , x2 ,
• 2W is the width of SL for the final assemblies
• NTL is defined so that no more than α% of the final assemblies will fall outside
SL ( the width of NTL= 2 Z α / 2 σ y = 2 W )
• assume n components with the same variance σ2
σy ≤
•
n
i =1
∂g
∂ xi
+R
µ 1 , µ 2 , ,µ n
µ y = E(y) ≈ g(µ1 , µ 2 , , µ n )
Design minimum clearance C (Example 7-11, P391)
⎛ C−µ ⎞
, xn )
= g( µ1 , µ 2 , , µ n ) + ∑ (x i – µ i )
σ 2y
W
⇒ σ2 ≤
Zα / 2
n
y
⎟= α
– Pr{clearance<C}= Φ⎜⎜
⎟
⎝ σy ⎠
, xn )
C − µy
σy
⎛ ∂g
i =1 ⎝ ∂ xi
= Z1−α = − Z α
J. Shi, the University of Michigan, shihang@umich.edu, 734-763-5321(O)
2
n
σ Y2 = Var(y) ≈ ∑ ⎜
317
µ 1, µ 2 ,
⎞ 2
⎟ σi
,µ n ⎠
J. Shi, the University of Michigan, shihang@umich.edu, 734-763-5321(O)
318
Example 2:
Example 7-12, P392:
Consider a cylinder cut from sheet aluminum as illustrated:
V = IR
Expanded,
V ≈ µI µR + (I – µI )µR + (R – µR ) µI
X
µV ≈ µI µ R
σ 2 V ≈ µR 2 σ I2 + µI2 σ R 2
Y
Assume X ~ N (20,2) and Y~N(10,1)
What is the mean and variance of the resultant volume?
Recall:
J. Shi, the University of Michigan, shihang@umich.edu, 734-763-5321(O)
319
Area of a circle = π r2
Circumference of a circle = 2 π r
J. Shi, the University of Michigan, shihang@umich.edu, 734-763-5321(O)
320
7-8 Estimating Natural Tolerance Limits of a
Process
Ch14 Acceptance Sampling for Attributes
In general we want an interval which contains (1-α)% of the process with
probability γ.
•
•
•
For a normal process distribution, Tables VII and Table VIII (see Appendix)
provide values for K for two- and one-sided tolerance limits respectively;
– ± KS
X
for 2 ≤ n ≤ 1000, γ = .90, .95, .99 and α = .10, .05, .01.
J. Shi, the University of Michigan, shihang@umich.edu, 734-763-5321(O)
321
J. Shi, the University of Michigan, shihang@umich.edu, 734-763-5321(O)
•
•
Scenario 1
– A company received a shipment of product from a vendor.
This product is often a component or raw material used in the
company’s manufacturing process. A sample is taken from the
lot, and some quality characteristic of the units in the sample
is inspected. On the basis of the information in this sample, a
decision is made regarding lot disposition. Usually, the
decision is either to accept or to reject the lot. This procedure
is called acceptance sampling.
Scenario 2
– A manufacturer will sample and inspect its own product at
various stages of production. Lots that are accepted are sent
forward for further processing, while rejected lots may be
reworked or scraped.
J. Shi, the University of Michigan, shihang@umich.edu, 734-763-5321(O)
322
Why use acceptance sampling?
What is acceptance sampling?
•
What is acceptance sampling?
Why use acceptance sampling?
Types of Sampling Plans
– Single sampling plan
– Double sampling plan
– Multiple-sampling plan
•
•
323
Three methods for lot sentencing
– Accept without inspection
– 100% inspection
– Acceptance sampling
Advantages of acceptance sampling
– It is usually less expensive because there is less inspection
(less personal, less inspection time, less inspection error)
– There is less handling of product, hence reduced damage
– Rejection of entire lots as opposed to the simple return of
defectives often provides a stronger motivation to the vendor
for quality improvement.
Disadvantages
– Risks of accepting “bad” lots and rejecting “good” lots.
– Less information is generated
– Need planning and documentation
J. Shi, the University of Michigan, shihang@umich.edu, 734-763-5321(O)
324
Considerations in acceptance sampling
Types of Acceptance Sampling
•
Single sampling plan
– The lot disposition is determined by one single sample.
•
Double-sampling plan
– The decision from the first sample is to (1) accept the lot, (2)
reject the lot, (3) take second sample.
– If we need to take the second sample, the lot disposition is
determined by both the first and the second sample.
•
Multiple-sampling plan
– It is an extension of double-sampling plan.
– Sequential sampling is an ultimate extension of multiple
sampling.
J. Shi, the University of Michigan, shihang@umich.edu, 734-763-5321(O)
•
•
•
325
An acceptance sampling plan is a statement of the sample size to
be used and the associated acceptance or rejection criteria for
sentencing individual lots.
J. Shi, the University of Michigan, shihang@umich.edu, 734-763-5321(O)
326
How to evaluate the acceptance sampling plan?
Single-Sampling Plans for Attributes
•
Lot formation
– Homogeneous
– Larger lots are better
– Lots should be conformable to the materials-handling systems
used in both the vendor and consumer facilities.
Random sampling
The performance is evaluated by OC curve: a plot that shows the
probability of accepting the lot versus the lot fraction defective.
Definition
– A single-sampling plan is defined by the sample size n and the
acceptance number c.
Example:
If the lot size is N=10000, then the sampling plan n=89, c=2
means that from a lot of size 10000 a random sample of n=89
units is inspected and the number of nonconforming or
defective items d observed. If d is less or equal to c = 2, the lot
will be accepted. If d is larger than 2, the lot will be rejected.
OC curve shows the discriminatory power of the sampling plan.
J. Shi, the University of Michigan, shihang@umich.edu, 734-763-5321(O)
327
J. Shi, the University of Michigan, shihang@umich.edu, 734-763-5321(O)
328
Draw OC curve for the single-sampling plan n=50,c=1. Assume lot
is infinite large
How to get OC curve?
P{d defectives} = f (d ) =
n!
p d (1 − p ) n −d
d ! ( n − d )!
c
n!
p d (1 − p ) n −d
d
!
(
n
−
d
)!
d =0
Pa = p{d ≤ c} = ∑
J. Shi, the University of Michigan, shihang@umich.edu, 734-763-5321(O)
329
J. Shi, the University of Michigan, shihang@umich.edu, 734-763-5321(O)
330
Effects of sample size n and defective number c on
OC curves
The ideal acceptance sampling plan
It can only be achieved by 100% inspection if there is no inspection error.
J. Shi, the University of Michigan, shihang@umich.edu, 734-763-5321(O)
331
J. Shi, the University of Michigan, shihang@umich.edu, 734-763-5321(O)
332
Type A and Type B OC curve
Characterization of OC curve
•
•
•
AQL: represents the poorest level of quality for the vendor’s
process that the consumer would consider to be acceptable as a
process average.
– It is defined by the consumer.
– An acceptance sampling plan should give a high probability of
acceptance at the AQL.
LTPD: lot tolerance percent defective. It is the poorest level of
quality that the consumer is willing to accept in an individual lot.
– It is also called rejectable quality level (RQL) or limiting quality
level (LQL).
– An acceptance sampling plan should give a low probability of
acceptance at RQL
J. Shi, the University of Michigan, shihang@umich.edu, 734-763-5321(O)
Type A OC curve: isolated lot with finite (small) size.
– Lot size N, sample size n, acceptance number c
– The # of defective units in the sample is “Hypergeometric”
distributed.
⎛ D ⎞⎛ N − D ⎞
⎜⎜ ⎟⎟⎜⎜
⎟
d n − d ⎟⎠
, D is Np
Pa = ∑ ⎝ ⎠⎝
⎛N⎞
d =0
⎜⎜ n ⎟⎟
⎝ ⎠
c
•
333
Type B OC curve: sample is from a infinite (large) lot
– The # of defective units in the sample is binomial distributed.
– Type B OC curve is always higher than type A curve
– If n/N>0.1, type A and type B are almost the same.
J. Shi, the University of Michigan, shihang@umich.edu, 734-763-5321(O)
334
Design a single-sampling plan with a specified OC
curve
An example of type A and type B OC curve
•
•
Need two points to define a curve.
– It does not matter which two points we select. It is customary
in industry to use AQL and RQL for this purpose.
Given Pr(accept|p1)=1-α where p1=AQL and Pr(accept|p2)=β where
p2=RQL, how to get n and c? Assume the lot size is large.
c
n!
d
p1 (1 − p1 ) n −d
d =0 d ! ( n − d )!
1− α = ∑
c
n!
d
p2 (1 − p2 ) n −d
d =0 d ! ( n − d )!
β=∑
J. Shi, the University of Michigan, shihang@umich.edu, 734-763-5321(O)
335
J. Shi, the University of Michigan, shihang@umich.edu, 734-763-5321(O)
336
Solve the equation by Binomial nomograph
Rectifying Inspection
•
Acceptance-sampling programs usually require corrective action
when lots are rejected. If the action is 100% inspection and to
replace all nonconforming parts, such sampling programs are
called rectifying inspection programs.
Example: p1=0.01, α=0.05, p2=0.06, β=0.1
J. Shi, the University of Michigan, shihang@umich.edu, 734-763-5321(O)
337
Average Outgoing Quality
•
•
J. Shi, the University of Michigan, shihang@umich.edu, 734-763-5321(O)
338
Example: suppose that N=10,000, n=89, and c=2, and that the
incoming lots are of quality p=0.01. What is AOQ?
It is the average value of total quality that would be obtained over
a long sequence of lots from a process.
The calculation of AOQ
– n items in the sample which, after the inspection, contain no
defectives.
– N-n items which, if the lot is rejected, also contain no
defectives
– N-n items which, if the lot is accepted, contain p(N-n)
defectives
Pa p( N − n )
N
AOQ ≈ Pa p
AOQ =
J. Shi, the University of Michigan, shihang@umich.edu, 734-763-5321(O)
339
J. Shi, the University of Michigan, shihang@umich.edu, 734-763-5321(O)
340
AOQ curve
Average total inspection
•
The average amount of inspection per lot will is the average total
inspection (ATI).
ATI = n + (1 − Pa )( N − n )
•
Example: N=10,000, n=89, c=2, and p=0.01. What is ATI?
The worst possible average quality that would result from the rectifying inspection program us called
average outgoing quality limit (AOQL)
J. Shi, the University of Michigan, shihang@umich.edu, 734-763-5321(O)
341
J. Shi, the University of Michigan, shihang@umich.edu, 734-763-5321(O)
342
Average total inspection curves
Summary of single-sampling plan for attributes
•
•
•
Definition
Performance evaluation: OC curve
– AQL and RQL points
– Type A and Type B OC curves
– Design a single-sampling plan with a specified OC curve
Rectifying Inspection
– AOQ
• AOQL
– ATI
J. Shi, the University of Michigan, shihang@umich.edu, 734-763-5321(O)
343
J. Shi, the University of Michigan, shihang@umich.edu, 734-763-5321(O)
344
Double-Sampling plan
Double, Multiple, and Sequential Sampling
•
•
Definition of double
sampling plan
– n1: sample size
on the first
sample
– c1: acceptance
number of the
first sample
– n2: sample size
on the second
sample
– c2: acceptance
number for both
samples
The operation of
double sampling
– Example:
n1=50,c1=1,n2=
100,c2=3
J. Shi, the University of Michigan, shihang@umich.edu, 734-763-5321(O)
•
•
345
Advantages
– Curtailment: reject a lot without complete the second sample
– Inspection size is smaller than single sampling plan
Disadvantages
– If not applied correctly, it may need more inspections
– Need more administration work
J. Shi, the University of Michigan, shihang@umich.edu, 734-763-5321(O)
The OC curve of a double-sampling plan
346
Average Sample Number Curve
•
Average sample number (ASN)
ASN = n1PI + ( n1 + n2 )(1 − PI ) = n1 + n2 (1 − PI )
•
ASN for a double-sampling plan with curtailment
ASN = n1 +
J. Shi, the University of Michigan, shihang@umich.edu, 734-763-5321(O)
347
c2
∑ P(n , j )[n P (n , c
j = c1 +1
1
2 L
2
2
− j ) + (c2 − j + 1) PM (n2 + 1, c2 − j + 2) / p ]
J. Shi, the University of Michigan, shihang@umich.edu, 734-763-5321(O)
348
Rectifying Inspection
Design Double-Sampling Plans
•
[ PaI ( N − n1 ) + PaII ( N − n1 − n2 )] p
N
I
ATI = n1Pa + ( n1 + n2 ) PaII + N (1 − Pa )
Required conditions
– p1, 1-α
– p2, β
– Another relation between parameters. We often require that n2
is a multiple of n1.
AOQ =
Pa = PaI + PaII
J. Shi, the University of Michigan, shihang@umich.edu, 734-763-5321(O)
349
J. Shi, the University of Michigan, shihang@umich.edu, 734-763-5321(O)
350