Vibration Absorbers as Controllers
advertisement

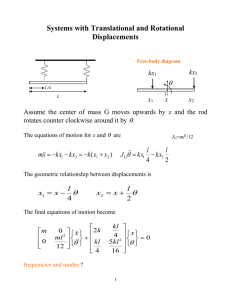
Vibration Absorbers as Controllers Eşref Eşkinat, Levent Öztürk Department of Mechanical Engineering Boğaziçi University, Istanbul, Turkey e-mail : eskinat@boun.edu.tr Keywords: Flexible Structures, Decentralized Control, Vibration Absorbers Abstract This paper considers the design of active and passive vibration absorbers for flexible structures. Similarities between absorber design and control problems are pointed out and an approach is presented to solve the absorber design problem by a technique that is similar to loop shaping technique used in control system design. A criterion for selecting the collocated sensor and actuator locations is developed and the approach is extended to design of multiple absorbers. An example is given to illustrate the results. 1. Introduction Vibration absorbers are devices attached to flexible structures in order to minimize the vibration amplitudes at a specified set of points. Design of vibration absorbers has a long history. First vibration absorber proposed by Frahm in 1909 [Den Hartog, 1956] consists of a second mass-spring device attached to the main device, also modeled as a mass-spring system, which prevents it from vibrating at the frequency of the sinusoidal forcing acting on the main device. If the absorber is tuned so that its natural frequency coincides with the frequency of the external forcing, the steady state vibration amplitude of the main device becomes zero. From a control perspective, the absorber acts like a controller that has an internal model of the disturbance, which therefore cancels the effect of the disturbance. The classical problem of damped vibration absorber that consists of a mass, spring and a viscous damper attached to an undamped single degree of freedom (DOF) system of which the mass is subject to harmonic forcing, has a well-known solution [Den Hartog, 1956]. If damping is added to the absorber, the vibration amplitude of the main mass cannot be made zero at the forcing frequency but the sensitivity of the system to variations in the forcing frequency decreases. Also the vibration amplitude of the absorber mass decreases considerably with a damped absorber. Vibration absorbers for multi degree of freedom systems have also been proposed. In [Wang et.al. 1985], an approach is presented to suppress vibrations in undamped multi DOF systems. Design of absorbers for beams is discussed in [Juang, 1983] and [Jacquot, 1978]. Absorber design for general vibrating systems was considered in [Kitis et. al.,1983]. In the literature, the term 'vibration absorber' is used for passive devices attached to the vibrating structure. Such devices are made up of masses, springs and dampers. From a control point of view, vibration absorbers can be considered as passive controllers. ( The term 'passive' is used loosely here, meaning that the controller can be constructed using masses, springs and dampers). For such controllers stability is not an issue, since the closed loop system is also a passive one. A general approach for the design of passive systems has been undertaken by [Juang and Phan, 1992]. Attempts have been made to formulate the absorber design problem as an output feedback problem in the context of LQ design [Stech,1994], or in the context of structural optimization, as a decentralized output feedback problem [Skelton et.al. , 1992] but the output feedback problem does not have a clear-cut solution and the optimization problem posed by this formulation is a difficult one to solve. It is possible to overcome the performance limitations of the passive absorbers by using active absorbers. Active absorbers, consisting of sensors, actuators and a controller offer more flexibility to the designer and have better performance, but they are more costly. A comparison of active and passive absorbers was given by [Herzog, 1994], pointing out the performance limitations of the passive absorbers. This paper approaches the problem of designing vibration absorbers as a frequency domain optimization problem with a fixed order controller. A natural starting point for the design of absorbers is the specification of the sensitivity function, which shows the reduction in vibration amplitude in the frequency domain. From this specification, absorber parameters can be extracted solving a weighted minimization problem in frequency domain. The problem of selecting the location of the absorber is approached by defining an 'absorber effectiveness' which has similarities with the structure selection tools such as partial disturbance gain used in multivariable process control [Hovd, Skogestad 1992]. Finally, the case of multiple absorbers is discussed. The similarities between the design of multiple absorbers and decentralized control is pointed out and a design procedure is outlined. 2. Problem Formulation a. Single Degree of Freedom Systems Consider the system given in Figure 1. The system equations can be written in s-domain as: F ( s) + f ( s) = G ( s ) F ( s) + G ( s ) f ( s ) Ms 2 + Cs + K M s 2 (C s + K a ) f ( s) = − a 2 a X ( s) = − Z ( s ) X ( s ) M a s + Ca s + K a X ( s) = (1) (2) Figure 1. Damped vibration absorber where Z(s) is the impedance of the absorber. The impedance of the absorber Z(s) can be interpreted as a controller acting on the system G(s). Combining equations (1) and (2), we obtain : X ( s) = G (s) F (s) 1 + G (s)Z (s) (3) Comparing equation (3) with (1), the vibration amplitude X is attenuated by a factor of 1 when an absorber is used. 1 + GZ This is the sensitivity function S(s) used in control theory [Doyle et.al. 1991]. If F(t) = F0 Sinω0t, then selecting : Ka (4) C a = 0, = ω 02 Ma in Z(s), cancels the effect of F, thus giving X=0. This is the classical undamped vibration absorber. If Ca≠0, then the solution for the damped vibration absorber is obtained by minimizing: G ( jω ) (5) P( jω ) = G ( jω ) S ( jω ) = 1 + G ( jω ) Z ( jω ) over all frequencies, that is, by minimizing the ∞ - norm of P(s). The solution of this problem is given in [Den Hartog, 1956] for the case of C=0. The damped absorber is less sensitive to variations in forcing frequency ω0 than the undamped one. Another approach might be to minimize the sensitivity function around the frequency range where forcing is concentrated. This approach will lead to the problem of minimizing | P(s)W(s) |, or equivalently designing Z(s) such that: 1 P ( jω ) ≤ ∀ ω (6) W ( jω ) where W(jω) is a weighting function describing the frequencies around which F is concentrated, and is scaled so that |F(t)| ≤ 1. Equation (6) leads to a difficult optimization problem, especially for multi-degree of freedom systems. The approach taken in this paper starts from defining a function ε(s) approximating S(s) and then obtains the absorber parameters by solving a simpler optimization problem. In addition to its simplicity, this approach gives valuable insights as to how to select the absorber locations for multi-DOF systems, as will be explained later. Defining the desired sensitivity function as ε(s), which behaves qualitatively as 1/W(s), ε (s) ≅ S ( s) = 1 1 + G ( s) Z ( s) (7) we can write: form which, Z(s) can be solved as: Z ( s) = 1 1 − ε (s) G ( s) ε (s) (8) A more physically motivated definition for ε (s) might be to define it as a ratio of the vibration amplitude of the main mass with the absorber XWA(s) to the one without the absorber XNA(s). That is: X ( s) 1 (9) = WA 1 + G ( s) Z ( s) X NA ( s) Typically ε(s) will have the shape of a notch filter. A possible choice for ε(s) for single sinusoidal forcing with frequency ω0 is: s s ( ) 2 + 2 ξ ( ) + 1 (10) ε (s) = ω ε (s) = ω 0 (( s ω 0 ) + 1) 2 0 A passive absorber such as the one in equation (2) cannot satisfy (8) for all frequencies, so it is reasonable to define a criterion J to be minimized in order to obtain absorber parameters: J = n ∑ Z ( jω k ) − Z ( j ω 2 k (11) ) k =1 where ωk are a discrete set of frequencies around which a good fit is required and Z ( s ) is the controller transfer function, such as the one defined in equation (2). The nonlinear programming problem posed by equation (11), along with the constraints on parameters (for example, for passive absorbers, Ma , Ca, Ka cannot be negative), can be solved using any nonlinear optimization scheme. b. Multi Degree of Freedom Systems For a multi degree of freedom structure, the degrees of freedom (DOF) can be classified into four sets: 1. XI: DOF at which vibration is to be minimized. 2. XF: DOF on which the forces are acting. 3. XA: DOF at which the absorber (or sensors and actuators) is to be attached. 4. Xo: Other degrees of freedom. These sets do not need to be disjoint, for example, for a single DOF system XI, XF, and XA coincide. Since the system matrices are symmetric, the transfer functions relating displacements to forces can be expressed as: X I GI I X = G F FI X A G AI G FI G FF G FA G AI 0 G FA F G AA f (12) where f is the internal force transferred to the system by the impedance of the absorber: f = −Z X A If a model system is defined by the following relationship: X I ( s) = ε ( s)G FI ( s) F ( s) (13) (14) using equations (12) and (13), we can solve for Z(s) as: Z= (1 − ε ) G FI G FA G AI + (ε − 1) G AA G FI (15) For the special case of XI = XA = XF = X, the above equation (15) reduces to equation (8), as in the case of single DOF systems. Given the structure of the absorber, parameters of the absorber Z> ( s) can be obtained by minimizing (11). 3. Selecting the Absorber Locations In a multi degree of freedom system, there is more than one choice for the location of the absorber (or the location of the collocated sensor and actuator for the active control case). At first sight, for a multi DOF system, location of the 'best' place for the absorber is not obvious. The best absorber should minimize the vibration amplitude at the selected degree of freedom with the least control effort possible. If a qualitative measure η i for an absorber located at i'th degree of freedom is defined, it might be possible to evaluate the effectiveness of the alternative locations. ηi = ∂ XI ∂ XI ∂ fi = ∂ fi ∂ F ∂ F −1 ηi can be defined as: (16) Evaluating the above expressions (12) to (15) we can obtain the simple expression for ηi : ε (17) ηi = (GAI )i ε −1 Note that η i is independent of the controller used and it can be used as a screening tool amongst the possible absorber locations. The absorber location i with the highest | η i | at the frequency of interest would be the best location for placing the absorber, in the sense that it would decrease XI to the desired value with the least control effort. Since the factor ε /(ε 1) is common for all absorber locations, η i is proportional to (GAI)i at the frequency of interest. This result is reasonable because the absorber location with the highest GAI would have the most effect on XI. The interesting point is that the | η i |, being a function of frequency, can differ at different frequencies of interest, therefore, the 'best' absorber location for a fixed XI can change with changing forcing frequency ω0. This will be illustrated by an example later . 4. Design for Multiple Forcing In the case of multiple sinusoidal forces with different frequencies acting on a structure, a single absorber will not be sufficient. Instead, multiple absorbers located at different locations and 'tuned' to the frequency of excitation might be used, as in [Igusa, Xu, 1994]. The approach developed in the sections above might also be used to design multiple absorbers for multiple forces, using the matrix equivalents of the above equations. When XF and XA are vectors of equal length n, the absorber impedance Z becomes a full n×n matrix. In addition to the problems to be encountered in parameter estimation, an impedance Z with cross-coupling terms might be hard to implement on a structure. Therefore, a solution with diagonal Z has to be sought. An approach similar to multivariable sequential loop closing [Maciejowski, 1989], used in decentralized control, can be taken to design multiple absorbers. First, an absorber is designed for one forcing, ignoring all others. Other absorbers are designed sequentially adding the already designed absorbers to the structure. It is necessary to perform a few iterations until the absorber parameters converge. 5. An Example Consider the 3 degree of freedom system shown in Figure 2, with M= 1, K=4, C=0.1. A harmonic force of F(t)= F0 Sin ω0t is applied on the first mass. The aim is to minimize the effect of this force on the third mass, using a vibration absorber. Figure 2. Three degree of freedom system Both active and passive absorbers will be considered. For passive absorbers, the absorber impedance is : M s 2 (C s + K a ) Z ( s) = a 2 a M a s + Ca s + K a where Ma is specified as 1 and Ka and Ca is to be determined. For active absorbers, the controller transfer function is defined as: a s2 + a2s + a3 Z< ( s ) = 1 2 s + a4s + a5 where a1…a5 is to be determined, with the constraint a4>0 and a5 > 0, so that the controller is stable. The original system has natural frequencies around 0.9 and 2.5 if its damping is neglected. The frequency of external forcing ω0 will be assumed to take these values. The desired sensitivity function ε (s) is selected as in equation (10) with ξ = 0.01. The frequency response of the transfer function GAI which determines the absorber effectiveness, is shown in Figure 3 for three different absorber locations. It can be seen that as |GAI |i varies with frequency, the 'best' absorber location changes. Table 1 gives the absorber effectiveness |ηi (jω0)| for the forcing frequencies ω0= 0.9 and 2.5, for different locations of the absorber. It can be seen that for ω0= 0.9, placing the absorber at the third mass is the best choice, whereas for ω0= 2.5, it is best to place the absorber at the first mass. This result is not surprising if when one considers the mode shapes of the original system. From the mode shapes of the undamped system given in Table 2, it can be seen that at the first natural frequency ω0= 0.9, the third mass attains the maximum amplitude and at the second natural frequency ω0=2.5, amplitude of the first mass is the greatest. In this example, the absorber location could have been selected observing the mode shapes, however for general non-proportionally damped structures, mode shapes do not have a physical meaning, but the approach proposed here still remains valid. Figure 3. |GAI (jω)| for different absorber locations. Location of absorber 1 2 3 |ηi (0.9j)| |ηi (2.5j)| 0.139 0.249 0.311 0.011 0.005 0.009 Table 1. Absorber effectiveness |ηi (jω0)| for different locations. Mass 1 Mode 1 0.328 Mode 2 0.737 Mode 3 0.591 2 3 0.591 0.737 0.328 -0.591 -0.737 0.328 Table 2. Normalized mode shapes of the undamped system. The absorber impedances Z ( s) for the active and passive case are obtained by solving the optimization problem defined by equation (11). Optimization problem is solved by selecting 10 frequency points in the vicinity of ω0. Results are given for the best absorber locations, dictated by highest |ηi (jω0)|. For ω0= 0.9, the absorber is placed on the third mass and for ω0= 2.5, it is located on the first mass. The frequency response of the system with these absorbers, along with the frequency response of the original system and the model closed loop system defined by εGFI are given in figures 4 and 5, for the cases of ω0=0.9 and ω0= 2.5. For comparison, the obtained passive absorber parameters Ka and Ca for different absorber locations are given in Table 3. It can be seen that the damping term Ca increases as the absorber is placed in positions which have higher absorber efficiency |ηi (jω0)|. Also, Ka approaches to undamped natural frequency squared of the original system as the absorber is placed in less efficient locations. Therefore, the absorber creates an anti-resonance in less efficient locations, giving a solution similar to the undamped absorber, whereas in more efficient locations it finds out a compromise between antiresonance and adding damping to the system. Obviously, the latter choice transmits less absorber force f to the system. Figure 4. Frequency response of the original system, system with absorbers and the model system for ω0=0.9. Figure 5. Frequency response of the original system, system with absorbers and the model system for ω0= 2.5. Frequency of forcing Absorber Location ω0=2.5 ω0=0.9 Ka Ca Ka Ca 1 2 3 0.830 0.765 0.723 0.080 0.180 0.245 6.140 6.263 6.247 0.418 0.060 0.259 Table 3. Passive absorber parameters for different locations. If the two resonances at ω0 = 0.9 and ω0 = 2.5 are to be simultaneously supressed, then two absorbers are necessary. Using the iterative procedure outlined in section 4, these absorbers can be designed. Forcing is assumed to be on the first mass and the vibrations of the third mass are to be supressed. As in the previous cases, absorbers with mass Ma = 1, are placed on the third and first masses. The design procedure used in single absorber design is used iteratively. The frequency response of the resulting design is given in Figure 6, and the resulting absorber parameters are Ka1 = 0.867, Ca1 = 0.079, Ka2 = 5.895, Ca2 = 0.248. Figure 6. Frequency response of the original system (dashed) and the modified system with two absorbers (solid), which are tuned to ω0=0.9 and ω0= 2.5. In the above example, absorbers act relatively independently, since they are tuned to the resonances of the original system. When the frequencies to be suppressed do not coincide with the resonances, the iterative solution tends to create antiresonant absorbers with little damping and with ( Ka / M a ) 1/ 2 close to the frequency of forcing. An example is given with ω01=1 and ω02= 1.5, for the same structure. The parameters of the designed absorbers are : Ma1 = Ma2 = 1, Ka1 = 1.043, Ca1 = 0.021, Ka2 = 2.313, Ca2 = 0.012. Figure 7. Frequency response of the original system (dashed) and the modified system with two absorbers (solid), which are tuned to ω0=1 and ω0= 1.5. 6. Conclusions In this paper, vibration absorber design is considered from a control point of view. The problem can be considered as matching a sensitivity function over a specified frequency range where the disturbances are effective, with a fixed order active or passive controller. An approach is proposed where the desired sensitivity function is specified and then the absorber parameters are obtained solving a nonlinear optimization problem. In contrast to many control problems, the selection of the manipulated variables (the location of the absorbers) is not an obvious choice in absorber design for multi DOF systems. It is shown that the 'best' absorber location is at the point where the transfer function between the absorber force and the displacement of the mass whose motion is to be minimized, is at its maximum, at the frequency range of interest. The approach is extended to the design of multiple absorbers, using an iterative technique that is similar to sequential loop closing used in decentralized control. Acknowledgement This research has been supported by Boğaziçi University Research Fund, Project No : 95A0640. References Den Hartog J.P. (1956) Mechanical Vibrations 4'th Edition, McGraw Hill. Doyle J. C., Francis B.A., Tannenbaum A.R. (1991) Feedback Control Theory, Macmillan. Herzog R. (1994) Active versus Passive Vibration Absorbers, ASME J. Dynamic Systems Measurement and Control V.116 pp. 367-371. Hovd M., Skogestad S. (1992) Simple Frequency Dependent Tools for Control System Analysis, Structure Selection and Design , Automatica, 28, 989-996 Igusa T. Xu K. (1994) Vibration Control using Multiple Tuned Mass Dampers, J. of Sound and Vibration V.175 pp. 491503. Jacquot R.G. (1978) Optimal Dynamic Vibration Absorbers for General Beam Systems. J. of Sound and Vibration V.60 pp. 535-542. Juang J.N., Phan M. (1992) Robust Controller Designs for Second Order Dynamic System : A Virtual Passive Approach. AIAA J. of Guidance Control Dynamics, V. 15 pp. 1192-1198. Juang J.N. (1984) Optimal Design of a Passive Vibration Absorber for a Truss Beam AIAA J. of Guidance Control Dynamics V. 7 pp. 733-738. Kitis L., Wang B.P., Pilkey W.D. (1983) Vibration Reduction over a Frequency Range. J. of Sound and Vibration V.89 pp. 559-569. Maciejowski J.M. (1989) Multivariable Feedback Design, Addison Wesley. Skelton R.E., Hanks B.R., Smith M., (1992) Structure Redesign for Improved Dynamic Response. AIAA J. of Guidance Control Dynamics V. 15 pp. 1272-1278. Stech D.J. (1994) H2 Approach for Optimally Tuning Passive Vibration Absorbers to Flexible Structures. AIAA J. of Guidance Control Dynamics V. 17 pp. 636-638. Wang B.P., Kitis L., Pilkey D., Palazzolo A. , (1985) Synthesis of Dynamic Vibration Absorbers, ASME J. of Vibration, Acoustics, Stress and Reliability in Design V.107 pp. 161-166.